Изобретение относится к экстремальным самонастраивающимся системам с сигнальным контуром самонастройки и может найти прим)енение при управлейии объектами, подвергающимися в процессе эксплуатации вынужденным периодическим колебанишл и имекядам по меньшей регулируемые координаты, колебания одной из крторых обычнЕЛми средствс1ми автоматики демпфировать не удается. Так, например, в системах управления возбуждением электрических машин в приводах переменного и постоянного тока, управляя возбуждением синхронного двигателя, можно демпфировать колебание реактивной составляющей тока, колебания активной составляющей тока не будут при этом демпфированы, yopiaBцяя воз буждением двигателя постоянного тока можно демпфировать колебание тока якоря, а колебания скорости вращения при этом не демпфируются, и наоборот.
Известна система управления, содержащая основной контур регулирования, состоящий из последовательно ; соединенных основного регулятора, первого сумматора, исполнительного
механизма, объекта управления и датчика регулируемой координаты, выход которого соединен с входом основного регулятора, и контур компенсации колебаний, содержащий последовательно соединенные амплитудный детектор,; первый ключ,и первый исполнительный орган, последовательно соединенные фазовый детектор, второй сумматор, .
10 второй и третий ключи и второй ис- полнительный орган, последовательнр соединенные смеситель, частотный детектор, четвертый ключ и трений исполнительнЕЛй .орган, выходы испол15нительных органов подключены к управляющим .входам генератора периодических колебаний, выход которого соединен с вторым входом первого сумматора и через преобразователь - .
20 с вторыми-входами фазового детекто- , ра и смесителя, первые входы КОТОЕЯЛХ и вход амплитудного детектора подключены к выходу датчика регулируемой координаты, выход амплитудного де25тектора соединен с управляющими входами третьего и четвертого ключей и через блок управления - с.вторым входом второго cyNwaTCHpa, выход которого соединен с управляющим вхо30дом первого ключа, выход частотного
детектора соединен с управляющим входом второго ключа Ul.
Известной системе присущи следующие недостатки: низкая точность, являющаяся следствием неизбежной для данного устройства ошибки по частоте, и сложность. Кроме того,, при.определенных обстоятельствах в ней возможно нарушегже устойчивой работы. Например, при снижении интесивности возмущающего воздействия происходит перекомпенсация. При это фаза колебаний выходной величины обекта управления изменяется приблизительно на противоположную и на выходе фазового детектора появляется сигнал. Начинается процесс настройки фазЕч, в результате которого фаза компеисирук11г1его сигнала изменяется (в то время как она была правильной и нужно было снижать амплитуду компенсирующего сигнала). Амплитуда колебаний выходной величины объекта управления увеличивается, т.е. колебания не демпфируются (компенсируются) , а наоборот-усиливаются.
Известна система управления, сояержащая задаюьщй генератор, выход которого через основной контур регулирования соединен с первыми входами первого и второго сумматоров, через последовательно соединенные инвертор, первый фазосдвигающий блок и первый усилитель - с вторым входом первого сумматора, а через последовательно соединенные второй фазосдвигающий блок и второй усилитель с вторым входом второго сумматора, выход которого через послеловательно соединенные первые детектор и интегра.тор подключен к пepвo входу третьего сумматора, а выход первого сумматора через последовательно соединенные вторые детектор и интегратор соединен с вторым входом третьего сумматора, выход которого через третий детектор подключен к входу многоканального экстремального регулятора, выходы которого соединены с управляющими входами первого и второго усилителей и первого и второго фазосдвигаю1)их блоков 2.
Недостатком известной ситсемы является ее сложность.
Наиболее близкой по технической сущности к изобретению является система управления, содержащая задающий генератор, выход которого через основной контур регулирования соединен с первым входом су 1матора, а через последовательно соединенные фазосдвигающий блок и усилитель соединен с вторым входом сумматора, выход которого через формирователь показателя качества подключен к входу одноканального экстремального регулятора, выходы которого соединены с сигнальным и управляющим входами
коммутатора, выходы которого через исполнительные органы соединены с управляющими входами усилителя и фазосдвигающего блока fsj.
К недостаткам.известной системы относятся ее низкие точность и устойчивость .
Целью изобретения является повы1иение точности и устойчивости системы.
Поставленная цель достигается тем, что в системе управления, содержащей основной контур регулирования, который состоит из последовательно соединенных регулятора, сумматора, исполнительного органа, объекта управления и датчика регулируемой координаты, выходом подключенного к входу регулятора, выходу основного контура регулирования и входу формирователя показателя качества, подключенного выходом к входу одноканального экстремального регулятора, подключенного выходами к сигнальному и управляющему входам коммутатора, соединенного выходами через соответствующие исполнительные механизмьа с управляющими входами усилителя и фазосдвигающего блока, а выход фазосдвигающего блока соединен с сигнальным входом усилителя, дополнительно установлен датчик промежуточной координаты, подключенный входом к второму выходу объекта управления, а выходом - к сигнальному входу фазосдвигающего блока, а выход усилителя подключен к второму входу сумматора.
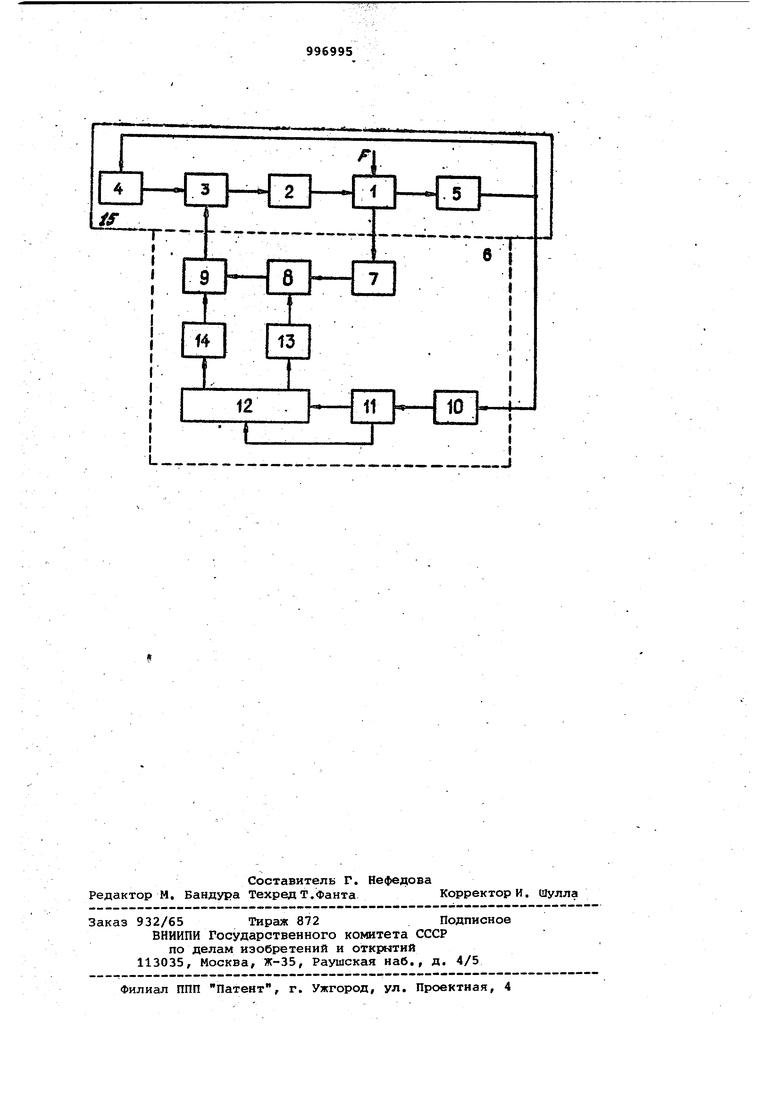
На чертеже представлена блок-схема системы.
Система содержит объект управления 1, исполнительный орган 2, сумматор 3s регулятор 4, датчик 5 регулируемой координаты., устройство для демпфирования колебаний 6, датчик 7 промежуточной координаты, фазосдвигающий блок 8, усилитель 9, формирователь 10 показателя качества, одноканальный экстремальный регулятор 11 коммутатор 12, исполнитеатьные-механизмы 13 и 14, основной контур регулирования 15.
Система работает следующим образом.. .
При воздействии на объект 1 возмущения F, являющегося периодической функцией времени, на его выходах возникают вынужденные колебания. Эти колебания воспринимаются датчиками 5 и 7 и на их выходах также появляются колебания. На вход объекта 1 через сумматор 3 и исполнительный орган 2 с выхода усилителя 9 подается компенсирующий сигнал. При определенных значениях фазы f (по отношению к фазе колебаний на выходе объекта 1) и амплитуды А компенсирующего сигнала амплитуда колебаний на выходе датчика 5 (следовательно, на соответствующем выходе объекта 1 будет минимальной (в идеале, равной нулю). Компенсирующий сигнал формируется из сигнала на выходе датчика 7, Требуемое значение его фазы f устанавливается с помощью фазосдвигающе го блока 8 путем подачи на его управляющий вход сигнала с выхода исполнительного механизма 13. Амплиту да А компенсирующего сигнала устанавливается с помошью усилителя 9 путем подачи на его управляющий вхо сигнала с выхода исполнительного ме ханизма 14. Конкретная реализация усилителя и фазосдвигающего блока 8 может быт различной и, в частности, зависит от частоты колебаний. Например, в качестве фазосдвигающего блока В может быть использован обычный фазоврапатель, содержащий два резисто потенциометр и конденсатор, собранные по мостовой схеме. В этом случа фаза Ч устанавливается путем .переме щения движка потенциометра. Изменения ам;тлитуды А также могут осуществляться перемещением .движка потенциометра (реостата), от которого зависит коэффициент усиления усилителя 9. В этом случае в качестве исполнительных меХанизмов 13 и 14 можно использовать серводвигатели. При неизменном возмущении значение амплитуды колебаний на выходе объекта 1, воспринимаемых датчиком 5 является функцией значений параметров Ч и А компенсирующего сигнала. Эта функция имеет экстремальный характер. В начале работы системы параметр Vf и А имеют наперед заданные -значе ния, близкие к оптимальным, для наиболее вероятного режима работы системы. В процессе работы системы ее режим может изменяться и соответ ствующие изменения получают парамет ры Н и А компенсирующего сигнала. Эти изменения осуществляются путем самонастройки с помощью формирователя 10, экстремального регулятора 11 и коммутатора 12. в начале осуществляется настройка фазы (f , т.е. осуществляется отыскание локального экстремума по этой координате при неизменном значении А (в случае ортогональности vf и А, что справедливо для многих объектов управления). Затем при неизменном значении (f находится локальный экстремум по коор динате А. В результате нескольких циклов настройки находится глобапьный экстремум, т.е. те значения и А, при которых амплитуда колебаний на выходе датчика 5 минимальна. Осуществляется это следующим образом. Сигнал на выходе формирователя 10 показателя качества (в качестве которого в частном случае может быть использован амплитудный детектор) пропорционален амплитуде колебаний на выходе датчика 5 (Ьгибающая кривая). Этот сигнал поступает на вход одноканального экстремального регулятора 11. Алгоритм отыскания экстремума, реализуемый экстремальным регулятором 11, зависит от специфики объекта управления 1 (стоимости, требований к точности, быстродействию и др.). Один из возможных алгоритиюв - с .пробным щагом -. описан ниже. Работа экстремального регулятора 11 разделена во времени на такты. Длительность такта берется примерно равной времени переходного процесса в объекте управления 1. В конце каждого такта измеряется и заполняется сигнал на входе экстремального регулятора 11, затем он сравнивается с значением сигнала, измереннь в конце предыдущего такта и извлеченным из памяти экстремального регулятора 11. В зависимости от результата сравнения на его выходе вырабатывается сигнал, например, в виде импульса напряжения определенной длительности и полярности. Это напряжение через коммутатор 12 подается на вход одного из исполнительных механизмов 13 (или 14) (на обмотку управления одного из серводвигателей). При этом настраиваемый параметр (ф или А) к началу очередного такта получает приращение, знак которого зависит от полярности-приложенного напряже-ния. Алгоритм работы экстремального регулятора в общих чертах заключает-, ся в следующем. Если появление импульса определенной полярности на выходе экстремального регулятора 11 в начале даннЪго такта привело на конце этого такта к уменьшению сигнала на его входе, то к началу следующего такта выраб.атывается импульс той же полярности. Если после, первого (пробного) шага сигнал на входе экстремального регулятора 11 увеличивается, то полярность изменяется на противоположную. Если появление на его выходе импульса определенной полярности в предыдущем такте привело к уменьшению сигнала на входе, а в следующем такте к увеличению, или оставило его неизменным, то значит достигнут локальный экстремум по данной координате. При этом на втором выходе экстремального регулятора 11, который связан с управляющим входом коммутатора 12, появляется управляющий сигнал. Например, если в качестве коммутатора 12 испольэуется электромагнитное реле, размыкэ :ющие контакты которого соединяют первый вход экстремального регулятора 11 с исполнительным механизмом 13, а замыкающие - с исполнительным механизмом 14 (чем достигается первоочередная настройка по координате f), то при достижении локального экстремума по координате на втором выходе экстремального регулятора 11 должно появиться напряжение. Это напряжение подается на обмотку реле коммутатора 12, которое отключает вход исполнительного механизма 13 от первого выхода экстремального регулятора 11 и подключает к этому выходу исполнительный механизм 14, и исчезает только после нахождения экс.тремума по координате А.
Реализовать указанный алгоритм можно на базе элементов Логика и элементов памяти или на базе микропроцессора.
Предлагаемо.е изобретение применимо в различных системах автоматического управления. Например, при применении его.для демпфирования колебаНИИ реактивного тока синхронного двигателя мощностью 630 кВт привода поршневого компрессора следует ожидать повышение точности и устойчи.востй системы примерно на 0,5%,
Формула изобретения
Системауправления, содержащая .основной контур-регулирования., состоящий из последовательно соединенных регулятора, сумматора, исполнительного органа, объекта управления и датчика регулируемой координаты, выходом подключенного к входу регулятора, выходу основного контура регулирования и входу формирователя показателя качества, подключенного выходом к входу одноканального экстремального регулятора, подключенного выходами к сигнальному и управляющему входам коммутатора, соединенного, выходами через соответствующие исполнительные механизмы с управляющими входами усилителя и фазосдвигающего блока, а выход фазосдвигающего блока соединен о сигнальным входом усилителя, о1личающаяся тем, что., с целью повышения точности и устойчивости системы, в ней установлен датчик промежуточной координаты, подключенный входом, к второму выходу объекта управления, а выходом к сигнальному входу фазосдвигающего блока, а выход усилителя подключен к второму входу сумматора.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство ОССР № 598022, кл. G 05 В 13/02, 1975.
2,Авторское свидетельство СССР № 554525, кл. G 05 .В 13/02, 1974,
3,Управление сложными объектами. Под ред. Я, 3. Цыпкина. М,, Наука, 1975, с, 28-34 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 1983 |
|
SU1168896A1 |
| Система экстремального управления | 1980 |
|
SU894672A1 |
| Многоканальная система экстремальногоРЕгулиРОВАНия | 1979 |
|
SU824141A1 |
| Система экстремального регулирования | 1974 |
|
SU661504A1 |
| Многоканальная система экстремального регулирования | 1981 |
|
SU1187147A1 |
| Система экстремального регулирования | 1980 |
|
SU888069A1 |
| Экстремальный регулятор для резонансного объекта | 1982 |
|
SU1035564A1 |
| Многоканальная система экстремального регулирования | 1974 |
|
SU528544A1 |
| СПОСОБ И УСТРОЙСТВО РАДИОВОЛНОВОГО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ | 1998 |
|
RU2145441C1 |
| Устройство для автоматической настройки катушки индуктивности с подмагничиванием в резонанс с емкостью | 1971 |
|
SU491180A1 |