Фиг.1
Изобретение относится к инфракрасной технике и может использоваться в системах охранной сигнализации.
Цель изобретения - расширение функциональных возможностей системы сигна- лизации.
На фиг. 1 представлена функциональная схема системы; на фиг. 2 - 4 - схема работы системы.
Пассивная инфракрасная система обна- ружения нарушителей содержит два канала. Первый канал включает в себя первый приемник 1 инфракрасного излучения, первый усилитель 2, подключенный к выходу приемника излучения, первый модулятор 3 излу- чения, расположенный перед оптическим входом приемника, первый оптический фильтр 4, размещенный между модулятором и приемником, и первый измеритель 5 частоты, подключенный к выходу усилителя 2. Второй канал системы включает в себя вторые приемник 6 инфракрасного излучения, усилитель 7, модулятор 8 излучения, оптический фильтр 9 и измеритель 10 частоты и совершенно идентичен первому кана- лу. Устройство содержит арифметический блок 11с выходом 12.
Варианты исполнения модулятора излучения могут быть различными. Например, в виде решетчатого элемента, в виде линей- чатого растра, либо в виде сетки непрозрачных линий, нанесенных на оптический фильтр, являющийся неотъемлемой частью оптической системы.
Приемник инфракрасного излучения, модулятор и оптический фильтр могут быть конструктивно сведены в один узел, который в дальнейшем будет именоваться детектором.
Сущность предлагаемого изобретения заключается в использовании двух детекторов, с помощью которых измеряется угловая скорость движения нарушителя, на основании которой вычислитель 10, входы которого подключены к выходам соответст- вующих измерителей 5 и 10 частоты, а выход является выходом 12 всей системы в целом, определяет расстояние до нарушителя.
Два идентичных детектора располагаются на разнесенных противоположных опорах, и смотрят друг на друга (фиг. 2). На фиг. 2 приняты следующие обозначения: а- угол зрения детекторов; а - протяженность непросматриваемой детектором зоны; I - протяженность контролируемого рубежа.
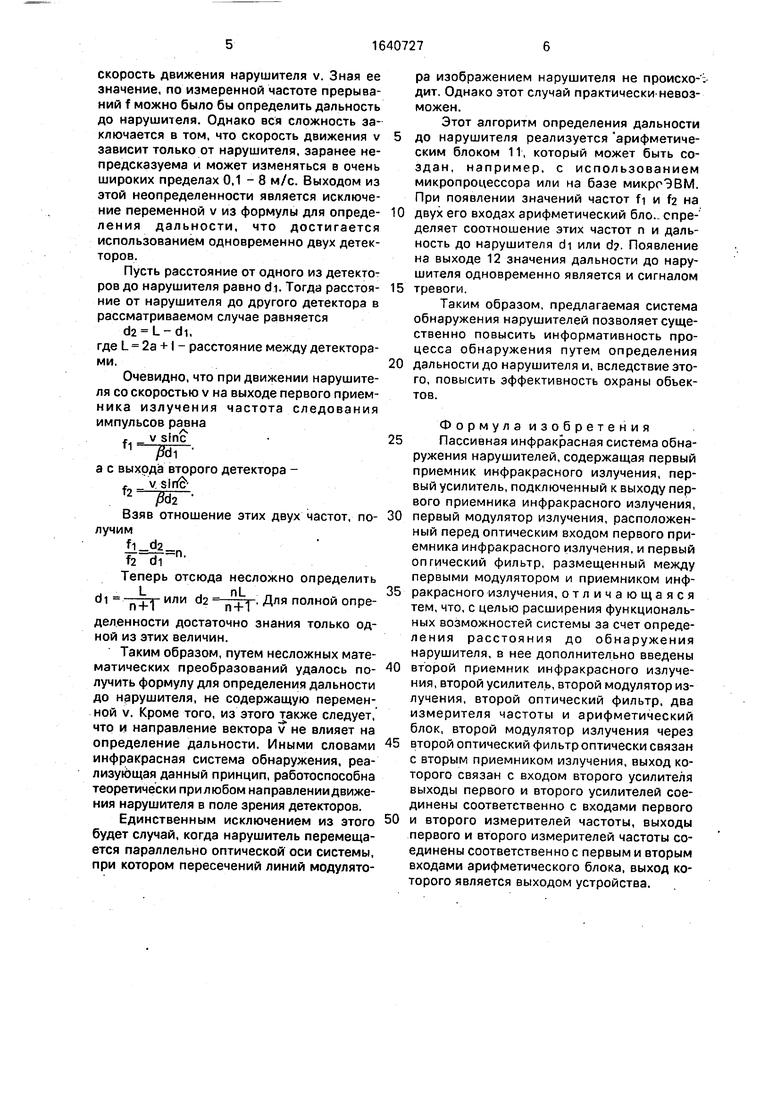
На фиг. 3 представлена зона обнаружения инфракрасной системы сверху. Заштри- хованная часть обозначает зону
работоспособности системы, при проникновении в которую нарушителя система выдает сигнал тревоги и определяет расстояние от него до одного из детекторов.
Рассмотрим работу системы.
В исходном состоянии нарушитель в поле зрения детекторов отсутствует, на выходах приемников 1 и 6 излучения частотно-модулированный сигнал отсутствует, отсутствует и сигнал на выходе 12 всей системы.
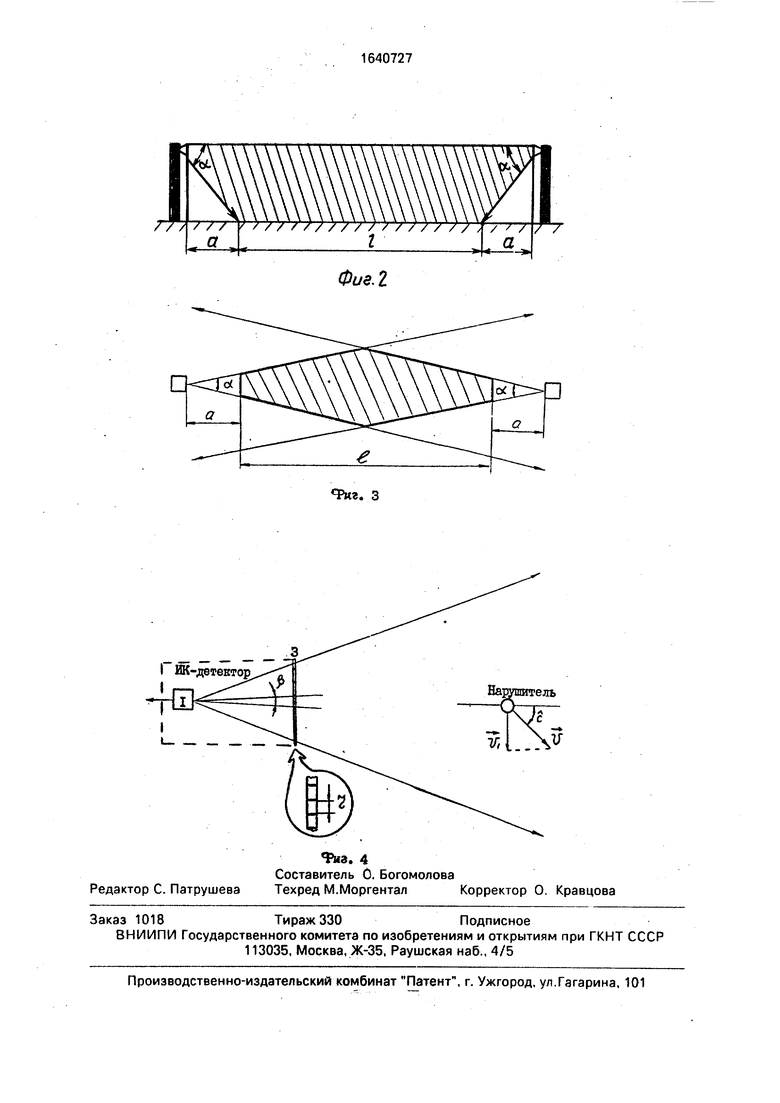
Пусть нарушитель, двигаясь со скоростью v под углом с к оптической оси системы, проникает в зону обнаружения. Принцип работы одного из детекторов поясняется фиг, 4. Оптический фильтр не показан. Изображение поля зрения с помощью оптики (также не показана на фиг. 4) через модулятор фокусируется на приемнике излучения. Когда нарушитель, представляющий собой источник инфракрасного излучения, движется в поле зрения детектора, линии модулятора прерывают это излучение с определенной частотой f, которая зависит от дальности d до нарушителя, скорости его движения v, расстояния от приемника излучения до модулятора р и от расстояния между линиями модулятора (линейного периода модулятора) г. В математической форме эта функциональная зависимость выглядит следующим образом: ш vi у sine4 Jti где ш- угловая скорость перемещения нарушителя ;
/3- угловой период модулятора, рад.
В свою очередь угловой период можно определить по формуле
P -Wa™ -WНа выходе приемника излучения появляется электрический сигнал с частотой f, который через усилитель поступает в измеритель частоты. Измеренное значение частоты F поступает на вход арифметического блока 11, который при наличии значения .частоты на втором входе определяет дальность до нарушителя.
Рассмотрим алгоритм определения дальности до нарушителя, реализуемый арифметическим блоком 11. Из формулы (1) путем простых преобразований можно получить формулу для определения дальности до нарушителя, которая выглядит следующим образом:
V f
Из анализа (2) следует, что единственной неизвестной величиной в ней является
f ш
I -0
(1)
скорость движения нарушителя v. Зная ее значение, по измеренной частоте прерываний f можно было бы определить дальность до нарушителя. Однако вся сложность заключается в том, что скорость движения v зависит только от нарушителя, заранее непредсказуема и может изменяться в очень широких пределах 0,1-8 м/с. Выходом из этой неопределенности является исключение переменной v из формулы для определения дальности, что достигается использованием одновременно двух детекторов.
Пусть расстояние от одного из детекторов до нарушителя равно di. Тогда расстояние от нарушителя до другого детектора в рассматриваемом случае равняется
da L-di,
где L 2а +1 - расстояние между детекторами.
Очевидно, что при движении нарушителя со скоростью v на выходе первого прием- ника излучения частота следования импульсов равна
f v sine
T1 Јdi а с выхода второго детектора , v sirtc4
Взяв отношение этих двух частот, получим
fi-d2 n Теперь отсюда несложно определить
или d2 J}L
di
-. Для полной определенности достаточно знания только одной из этих величин.
Таким образом, путем несложных математических преобразований удалось получить формулу для определения дальности до нарушителя, не содержащую переменной v. Кроме того, из этого также следует, что и направление вектора Г не влияет на определение дальности. Иными словами инфракрасная система обнаружения, реализующая данный принцип, работоспособна теоретически прилюбом направлении движения нарушителя в поле зрения детекторов.
Единственным исключением из этого будет случай, когда нарушитель перемещается параллельно оптической оси системы, при котором пересечений линий модулятора изображением нарушителя не происхо- l дит. Однако этот случай практически невозможен.
Этот алгоритм определения дальности
до нарушителя реализуется арифметическим блоком 11, который может быть со- здан, например, с использованием микропроцессора или на базе микроЭВМ. При появлении значений частот fi и f2 на
двух его входах арифметический бло. определяет соотношение этих частот п и дальность до нарушителя ch или d. Появление на выходе 12 значения дальности до нарушителя одновременно является и сигналом
тревоги.
Таким образом, предлагаемая система обнаружения нарушителей позволяет существенно повысить информативность процесса обнаружения путем определения
дальности до нарушителя и, вследствие этого, повысить эффективность охраны объектов.
Формула изобретения
Пассивная инфракрасная система обнаружения нарушителей, содержащая первый приемник инфракрасного излучения, первый усилитель, подключенный к выходу первого приемника инфракрасного излучения,
первый модулятор излучения, расположенный перед оптическим входом первого приемника инфракрасного излучения, и первый оптический фильтр, размещенный между первыми модулятором и приемником инфракрасного излучения, отличающаяся тем, что, с целью расширения функциональных возможностей системы за счет определения расстояния до обнаружения нарушителя, в нее дополнительно введены
второй приемник инфракрасного излучения, второй усилитель, второй модулятор излучения, второй оптический фильтр, два измерителя частоты и арифметический блок, второй модулятор излучения через
второй оптический фильтр оптически связан с вторым приемником излучения, выход которого связан с входом второго усилителя выходы первого и второго усилителей соединены соответственно с входами первого
и второго измерителей частоты, выходы первого и второго измерителей частоты соединены соответственно с первым и вторым входами арифметического блока, выход которого является выходом устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пассивное инфракрасное устройство для обнаружения нарушителя с формированием граничных сигналов | 2017 |
|
RU2661751C1 |
| Интеллектуальное пассивное инфракрасное средство обнаружения | 2016 |
|
RU2629146C1 |
| ИНФРАКРАСНАЯ АКТИВНАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2014 |
|
RU2573261C2 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ДЛЯ РАКЕТ МОРСКОГО БАЗИРОВАНИЯ | 2014 |
|
RU2565821C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ЦЕЛЕУКАЗАНИЯ | 2014 |
|
RU2563312C1 |
| ДВУХЧАСТОТНОЕ ИМПУЛЬСНО-ДОПЛЕРОВСКОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2015 |
|
RU2594383C1 |
| Устройство для сигнализации | 1989 |
|
SU1742840A1 |
| Инфракрасная активная система для контроля протяженных рубежей охраны | 2019 |
|
RU2722927C1 |
| РАДИОВОЛНОВОЙ СПОСОБ ОБНАРУЖЕНИЯ И РАСПОЗНАНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2609877C2 |
| ЛАЗЕРНЫЙ ЛОКАТОР | 2011 |
|
RU2456636C1 |
Изобретение относится к инфракрасной технике и может использоваться в системах охранной сигнализации. Цель изобретения состоит в расширении функциональных возможностей, что заключается в способности системы обнаружения определять дальность до нарушителя. Пассивная инфракрасная система обнаружения состоит из двух совершенно идентичных между собой каналов и арифметического блока 11. В каналы входят модуляторы 3, 8 излучения, оптические фильтры 4, 9, приемники 1, 6 инфракрасного излучения, усилители 2, 7 и измерители 5, 10 частоты. Модулятор 3(8) излучения может быть выполнен, например, в виде решетчатого элемента, в виде линейчатого растра, либо в виде сетки непрозрачных линий, нанесенных на поверхность оптического фильтра 4(9). Приемники 1, 6 располагаются на противоположных концах зоны обнаружения и обращены друг к другу. Инфракрасное излучение перемещающегося нарушителя прерывается линиями модулятора 3(8) с определенной частотой, зависящей от многих факторов, в том числе и от дальности до нарушителя. Значения частот прерываний из каждого канала поступают в арифметический блок 11, который определяет их соотношение и вычисляет расстояние до нарушителя. 4 ил.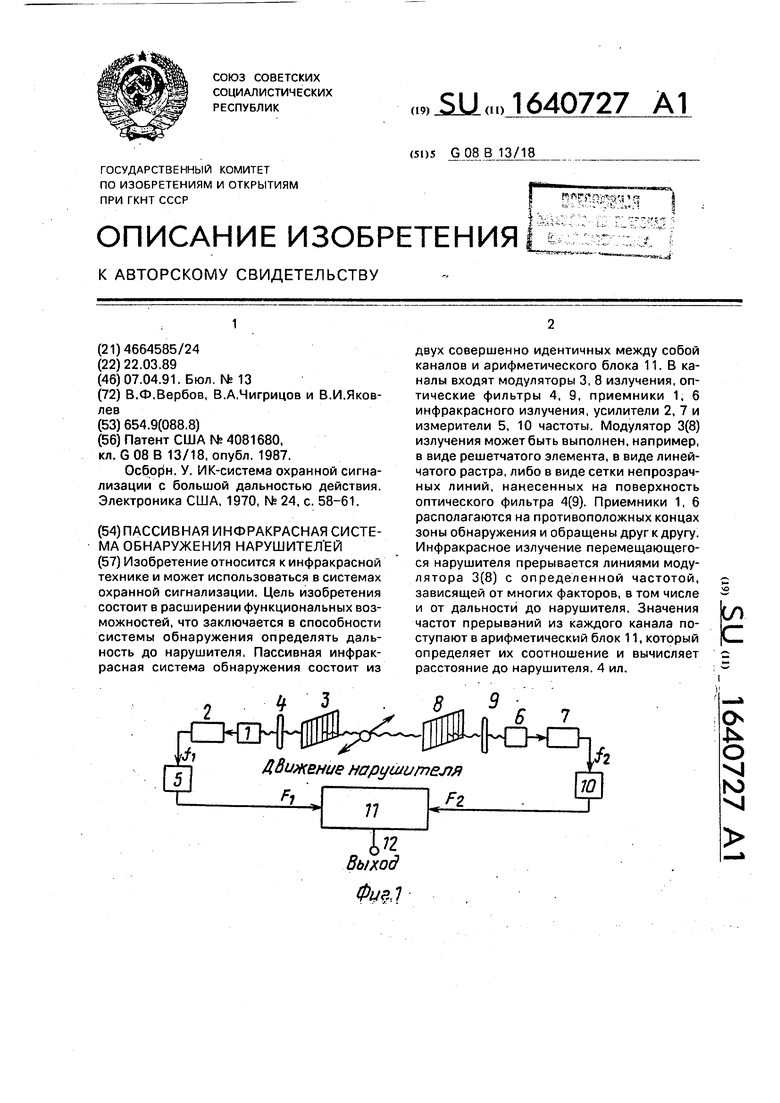
Фие.2
«Sto. 3
I ИК-детектор - . j Я
| Патент США № 4081680, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
| Осборн | |||
| У | |||
| ИК-система охранной сигнализации с большой дальностью действия | |||
| Электроника США, 1970, № 24, с | |||
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
