Изобретение относится к техническим средствам охраны и может быть использовано для обнаружения и распознавания перемещающихся объектов на охраняемом рубеже.
Существуют радиоволновые способы обнаружения перемещающихся объектов, основанные на регистрации изменений электромагнитного поля при пересечении объектом объемной зоны обнаружения между приемной и передающей антенными системами, которые реализованы в средстве обнаружения «Бином-2П». [1]
Способ обнаружения перемещающихся объектов, используемый в радиоволновом средстве обнаружения «Бином-2П», основан на регистрации изменений электромагнитного поля при пересечении объектом объемной зоны обнаружения, формируемой между излучающим кабелем и локальной приемной антенной, представляющей собой четвертьволновый вертикальный вибратор [1]. В передающем кабеле устанавливается режим, близкий к режиму бегущей волны, и часть электромагнитной энергии проникает в смеситель блока обработки, где используется в качестве опорного сигнала. На вход смесителя поступает сигнал с приемной антенны. При появлении перемещающегося объекта происходит низкочастотная модуляция амплитуды и фазы сигнала связи, в результате чего на выходе смесителя появляются низкочастотные биения, по наличию и характеру которых принимается решение о наличии или отсутствии объекта в зоне обнаружения.
Недостатком данного способа является малое время наработки на ложное срабатывание, обусловленное наличием приемника, чувствительного к воздействию электромагнитных помех.
Известен также радиоволновой способ обнаружения перемещающихся объектов [2], основанный на регистрации изменения коэффициента стоячей волны при пересечении объектом объемной зоны обнаружения. Данный способ обнаружения основан на мониторинге характеристик электромагнитного поля в зоне контроля излучателя. Наличие объекта в контролируемой зоне приводит к появлению дифрагированного на нем электромагнитного поля. Это поле воздействует на антенну первичного излучателя, создавая на его поверхности электродвижущую силу (ЭДС). В соответствии с требованиями граничных условий для идеальных проводников тангенциальная составляющая напряженности электрического поля на их поверхности должна равняться нулю. Для того, чтобы скомпенсировать наведенную объектом составляющую, распределение тока вдоль тела линейной антенны-излучателя должно измениться так, чтобы создалась компонента, равная по амплитуде наведенной, но противофазная ей.
Таким образом, присутствие объекта изменяет структуру электромагнитного поля излучателя, вследствие чего меняются электрические параметры самого излучателя. В качестве контролируемого параметра используется коэффициент стоячей волны (КСВ). Пересчет величин амплитуд падающей (Uпад) и отраженной (Uотр) волн в коэффициент стоячей волны осуществляется по формуле:

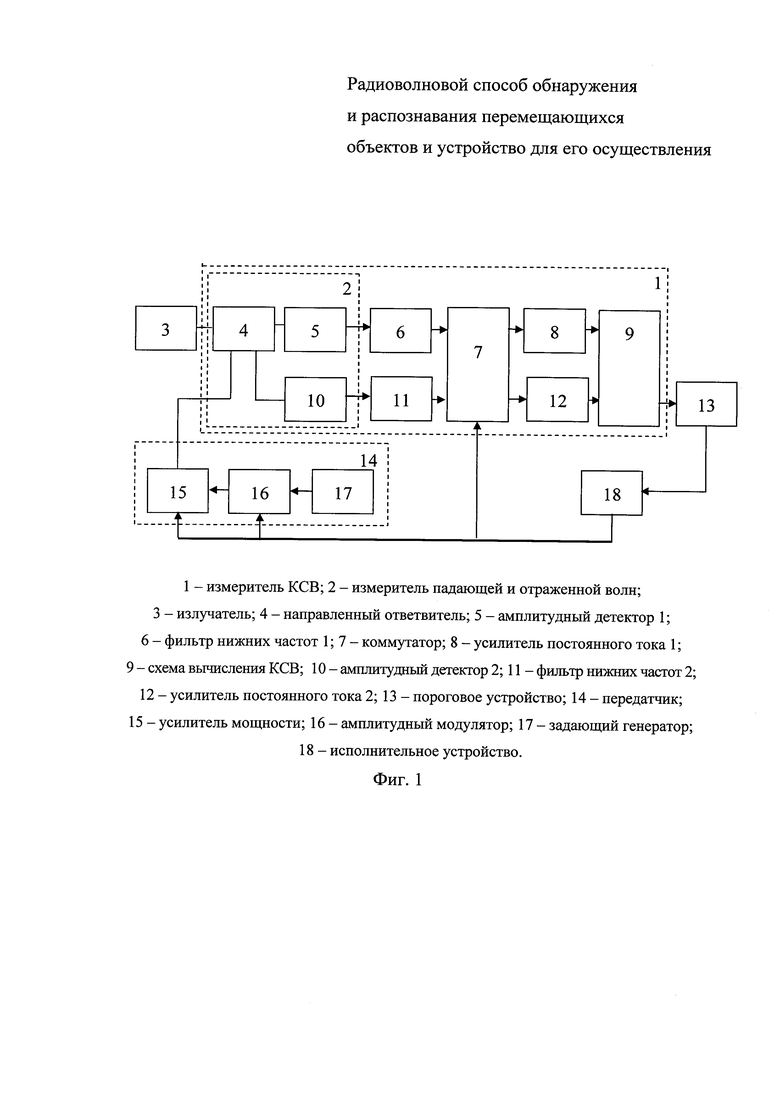
На фиг. 1 иллюстрируется вариант практической реализации данного радиоволнового способа обнаружения. В состав однопозиционного радиоволнового средства обнаружения входят: измеритель 1 коэффициента стоячей волны, состоящий из измерителя 2 падающей и отраженной волн, состоящего из направленного ответвителя 4 и амплитудных детекторов 5 и 10, фильтров 6 и 11 нижних частот, коммутатора 7, усилителей 8 и 12 постоянного тока, схемы 9 вычисления коэффициента стоячей волны, излучатель 3, пороговое устройство 13, передатчик 14, состоящий из усилителя 15 мощности, модулятора 16 и задающего генератора 17 и исполнительное устройство 18.
Измеритель 1 коэффициента стоячей волны последовательно разделяет сигнал, обрабатывает и усиливает его, таким образом, формирует информационный сигнал, соответствующий выражению (1).
В схеме измерителя 2 падающей и отраженной волн происходит разделение сигнала на два канала: падающей и отраженной волн.
Излучатель 3 представляет собой несимметричный четвертьволновый вибратор, который выполнен из проволоки диаметром 5-10 мм длиной 1,7 м. Излучатель 3 соединяется с направленным ответвителем 4, имеющим четыре плеча, к которым помимо излучателя 3 подключены усилитель 15 мощности и амплитудные детекторы 5 и 10.
Направленный ответвитель (НО) 4 предназначен для разделения падающей и отраженной волн.
Амплитудные детекторы 5 и 10 идентичны по структуре. Амплитудный детектор 5 используется для детектирования падающей волны, амплитудный детектор 10 - для отраженной волны. Амплитудные детекторы 5 и 10 своими выходами через фильтры нижних частот 6 и 11 соединяются с входами коммутатора 7.
Выходы фильтров нижних частот 6 и 11 соединены с входами коммутатора 7 и предназначены для удаления из сигнала высокочастотной составляющей, являющейся отрицательным воздействием от фона.
Коммутатор 7 осуществляет соединение выходов фильтров 6 и 11 нижних частот с входами усилителей 8 и 12 и предназначен для отключения усилителей 8 и 12 постоянного тока в момент передачи сигнала тревоги, поскольку для передачи используется чувствительный элемент (четвертьволновой вибратор). Выходы коммутатора 7 соединяются с входами усилителей постоянного тока 8 и 12.
Усилители постоянного тока 8 и 12 осуществляют усиление информационного сигнала по току. Выходы усилителей постоянного тока 8 и 12 соединяются с входами схемы 9 вычисления КСВ.
Выход схемы 9 вычисления КСВ соединяется с входом порогового устройства 13. В качестве порогового устройства 13 используется компаратор, на один вход которого подается опорное напряжение, задающее порог срабатывания компаратора, а на второй - сигнал со схемы 9 вычисления КСВ. Выход порогового устройства 13 соединен с входом системы 18 определения дальности.
Передатчик 14 предназначен для выработки электромагнитных колебаний и передачи сигнала срабатывания на приемное устройство системы сбора и обработки информации. Задающий генератор 17 генерирует высокостабильные радиочастотные колебания в заданном диапазоне частот.
Передатчик 14 состоит из задающего генератора 17, формирующего синусоидальный сигнал, который в дальнейшем используется как несущая, модулятора 16, который изменяет несущий сигнал по закону передаваемого сообщения, и усилителя 15 мощности, который выступает как оконечный каскад передатчика 14 и формирует сигнал определенной мощности для передачи сообщения через радиоканал.
Выход исполнительного устройства 18 соединяется со входом коммутатора 7, со входом амплитудного модулятора 16 и входом усилителя 15 мощности. Устройство работает следующим образом.
В исходном состоянии («дежурном» режиме) передатчик 14 вырабатывает электромагнитные колебания на заданной частоте излучения f1 при мощности излучения РΣдеж, которые через направленный ответвитель 4 излучаются излучателем 3. На выходе исполнительного устройства 18 сигнал срабатывания отсутствует.
В случае появления объекта обнаружения амплитуда отраженной волны увеличивается, вследствие чего меняется величина коэффициента стоячей волны. Эта величина сравнивается с заданным пороговым значением в пороговом устройстве 13. При превышении порогового значения происходит срабатывание порогового устройства, которое вызывает включение исполнительного устройства 18. Исполнительное устройство 18 переключает коммутатор 7, включает амплитудный модулятор 16 и усилитель мощности 15 в режим передачи сигнала "Тревога". Коммутатор отключает усилители 8 и 12 и схему 9 вычисления КСВ. Амплитудный модулятор 16 начинает вырабатывать кодовую последовательность импульсов, соответствующую сигналу «Тревога». Усилитель 15 мощности, имеющий в своем составе регулирующий элемент, позволяет увеличить выходную мощность передатчика 14, обеспечивая передачу информации по радиоканалу. Через определенное время исполнительное устройство 18 переходит в дежурный режим, переключает коммутатор 7 в исходное состояние, и мощность излучения передатчика 14 уменьшается.
Недостатками данного способа являются низкие помехоустойчивость и информативность ввиду отсутствия возможности распознавания обнаруженных перемещающихся объектов (людей и животных).
Целью данного изобретения является повышение помехоустойчивости средства обнаружения за счет распознавания людей и животных при пересечении объектом объемной зоны обнаружения.
Основными задачами, решаемыми в изобретении, являются:
1) разработка способа обнаружения и распознавания, основанного на определении расстояния до объекта обнаружения при помощи подсистемы локации и классификации воздействий: объект обнаружения - животные - помеха.
2) создание устройства для реализации разработанного способа.
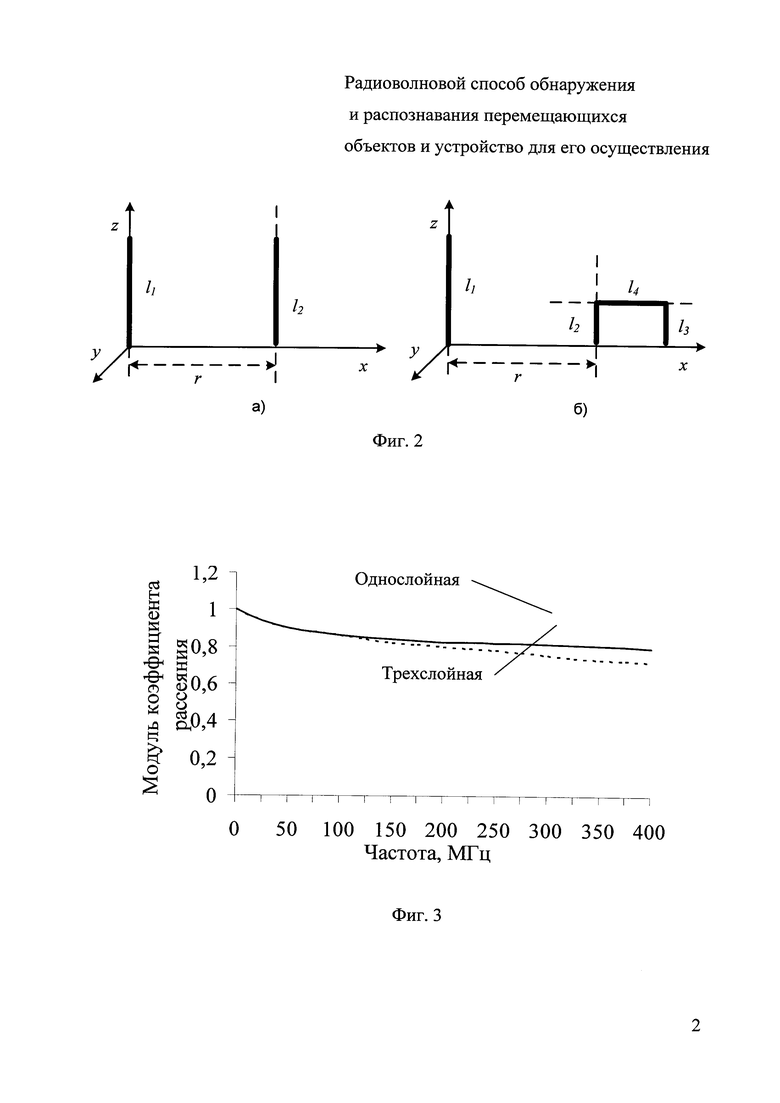
Известно, что модель человека, взаимодействующая с чувствительным элементом (l1) средства обнаружения в диапазоне частот до 100 МГц, представляется в виде простого вертикального вибратора длиной (l2), соответствующей среднему росту человека (фиг. 2а), и рассматривается как однослойная модель (воздушная среда, слой кожи). [3]
Анализ электрофизических характеристик животного показал, что кожный покров, мышечная и жировая ткани весьма схожи с характеристиками тела человека. На основании исследования модуля коэффициента рассеяния для однослойной и трехслойной (воздушная среда, слой кожи, слой жира и бесконечный по толщине слой мышечной ткани) модели животного установлено, что в диапазоне частот до 100 МГц тело животного можно описать однослойной моделью с параметрами кожной ткани (фиг. 3). Следовательно, на частотах до 100 МГц тело животного можно считать проводящим, а преломленные волны в его тканях плоскими. При этом допустимо представление тела животного в виде П-образного пассивного вибратора, состоящего из системы двух вертикальных электрических вибраторов (l2, l3), соответствующих высоте передних и задних конечностей, находящихся на расстоянии, равном длине (l4) тела животного (фиг. 2б).
Таким образом, в диапазоне частот до 100 МГц модели человека и животных отличаются количеством, геометрическими размерами и пространственным положением описывающих их пассивных вибраторов.
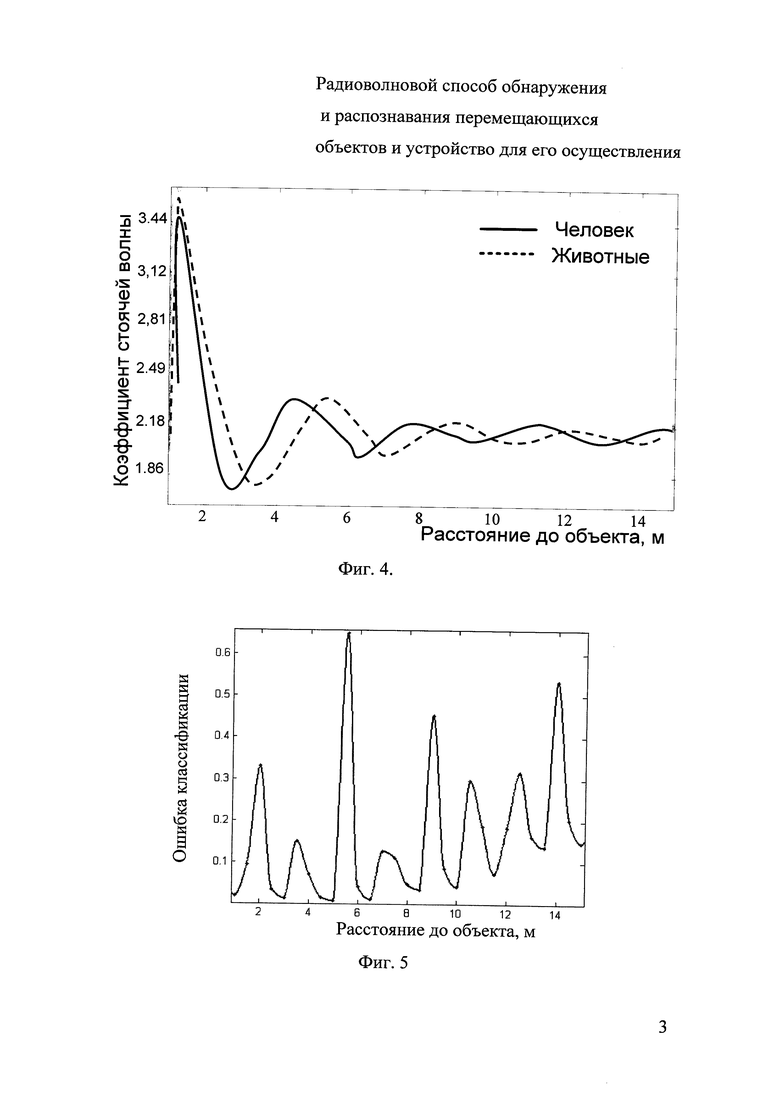
Для построения алгоритма работы классификатора выбран линейный дискриминант Фишера [5]. При этом в двумерном пространстве признаков в качестве параметров используются коэффициент отражения и расстояние до объекта обнаружения. В итоге получена зависимость ошибки классификации от расстояния до объектов обнаружения (фиг. 5). Анализ распределений объектов обнаружения в признаковом пространстве позволил сделать выводы о возможности компактного группирования классов: «животные», «человек», «помеха».
Таким образом, исследования доказали возможность обнаружения и распознавания человека в условиях воздействия животных на основании регистрации изменения электромагнитного поля вокруг передающей антенны путем измерения КСВ и расстояния до объекта, полученного от системы определения дальности.
Сущность изобретения поясняется чертежами, где на:
- фиг. 1 представлена структурная схема радиоволнового средства обнаружения;
- фиг. 2 - электродинамические модели человека (а) и животного (б);
- фиг. 3 - графики зависимостей модулей коэффициентов рассеяния от частоты для однослойной и трехслойной моделей объектов обнаружения;
- фиг. 4 - график зависимости коэффициента стоячей волны активного вибратора от расстояния до объекта обнаружения;
- фиг. 5 - график зависимости ошибки классификации (MSE) от расстояния до объектов обнаружения;
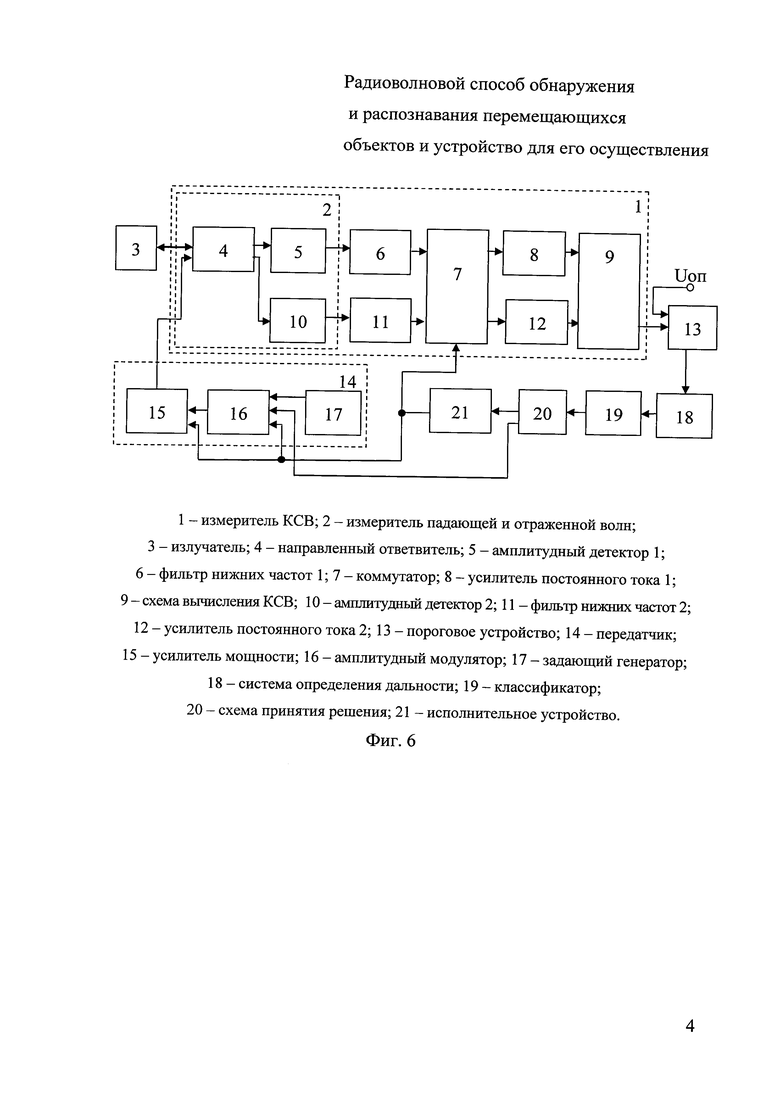
- фиг. 6 - структурная схема предлагаемого радиоволнового средства обнаружения и распознавания;
- фиг. 7 - алгоритм функционирования радиоволнового средства обнаружения и распознавания объектов.
Радиоволновой способ обнаружения и распознавания перемещающихся объектов заключается в следующем:
1. Регистрация изменения электромагнитного поля вокруг передающей антенны по изменению значения КСВ при появлении объекта в зоне обнаружения.
2. Определение расстояния от передающей антенны до объекта обнаружения системой определения дальности.
3. Классификация объекта обнаружения по двум признакам: значение КСВ и расстояние до объекта обнаружения.
4. При классификации объекта обнаружения как «человек» происходит выдача сигнала тревоги. Во всех остальных случаях («животное», «помеха») система продолжает работать в дежурном режиме.
Для реализации данного способа предложено радиоволновое средство обнаружения и распознавания, вариант реализации которого представлен на фиг. 6. В состав однопозиционного радиоволнового средства обнаружения и распознавания перемещающихся объектов входят: измеритель 1 коэффициента стоячей волны, состоящий из измерителя 2 падающей и отраженной волн, состоящего из направленного ответвителя 4 и амплитудных детекторов 5 и 10, фильтров 6 и 11 нижних частот, коммутатора 7, усилителей 8 и 12 постоянного тока, схемы 9 вычисления коэффициента стоячей волны, излучатель 3, пороговое устройство 13, передатчик 14, состоящий из усилителя 15 мощности, модулятора 16 и задающего генератора 17, система 18 определения дальности, классификатор 19, схема 20 принятия решения и исполнительное устройство 21.
Измеритель 1 коэффициента стоячей волны последовательно разделяет сигнал, обрабатывает и усиливает его, таким образом формирует информационный сигнал, соответствующий выражению (1).
В схеме измерителя 2 падающей и отраженной волн происходит разделение сигнала на два канала - падающей и отраженной волн.
Излучатель 3 представляет собой несимметричный четвертьволновый вибратор, который выполнен из проволоки диаметром 5-10 мм длиной 1,7 м. Выход излучателя 3 соединен со входом направленного ответвителя 4, имеющего четыре плеча, к которым помимо излучателя 3 подключены выход усилителя 15 мощности и входы амплитудных детекторов 5 и 10.
Направленный ответвитель (НО) 4 предназначен для разделения падающей и отраженной волн. Направленный ответвитель должен быть полностью согласован с подводящими линиями и не должен вносить потерь в передаваемые сигналы.
При отсутствии объектов обнаружения в зоне действия излучателя НО полностью согласован. При этом отраженная волна имеет на выходе минимальную амплитуду. При появлении нарушителя в зоне действия излучателя модуль входного сопротивления изменяется по величине, следовательно, ухудшается согласование антенны. При этом амплитуда отраженной волны увеличивается, что ведет к изменению коэффициента стоячей волны.
Амплитудные детекторы 5 и 10 идентичны по структуре. Амплитудный детектор 5 используется для детектирования падающей волны, амплитудный детектор 10 - для отраженной волны. Амплитудные детекторы 5 и 10 своими выходами через фильтры нижних частот 6 и 11 соединяются с входами коммутатора 7.
Выходы фильтров нижних частот 6 и 11 соединены с входами коммутатора 7, фильтры предназначены для удаления из сигнала высокочастотной составляющей, являющейся отрицательным воздействием от фона.
Коммутатор 7 осуществляет соединение выходов фильтров 6 и 11 нижних частот с входами усилителей 8 и 12 и предназначен для отключения усилителей 8 и 12 постоянного тока в момент передачи сигнала тревоги, поскольку для передачи используется чувствительный элемент (четвертьволновой вибратор). Выходы коммутатора 7 соединены с входами усилителей постоянного тока 8 и 12.
Усилители постоянного тока 8 и 12 осуществляют усиление информационного сигнала по току. Выходы усилителей постоянного тока 8 и 12 соединены с входами схемы 9 вычисления КСВ.
Выход схемы 9 вычисления КСВ соединен с входом порогового устройства 13. В качестве порогового устройства 13 используется компаратор, на один вход которого подается опорное напряжение, задающее порог срабатывания компаратора, а на второй - сигнал со схемы 9 вычисления КСВ. Выход порогового устройства 13 соединен с входом системы 18 определения дальности.
Передатчик 14 предназначен для выработки электромагнитных колебаний и передачи сигнала срабатывания на приемное устройство системы сбора и обработки информации. Задающий генератор (например, кварцевый) генерирует высокостабильные радиочастотные колебания в заданном диапазоне частот.
Передатчик 14 состоит из задающего генератора 17, формирующего синусоидальный сигнал, который в дальнейшем используется как несущая, модулятора 16, который изменяет несущий сигнал по закону передаваемого сообщения, и усилителя 15 мощности, который выступает как оконечный каскад передатчика 14 и формирует сигнал определенной мощности для передачи сообщения через радиоканал.
Система 18 определения дальности предназначена для определения расстояния от излучателя до обнаруженного объекта и может быть реализована как дальномер, локатор и т.п. [6, 7] Выход системы 18 определения дальности соединяется с входом классификатора 19.
Классификатор 19 предназначен для классификации обнаруженных сигналов от объектов по двум признакам: измеренному коэффициенту стоячей волны и расстоянию от излучателя до объекта, например, на основе линейного дискриминанта Фишера. [5] Выход классификатора 19 соединяется с входом схемы 20 принятия решения.
Схема 20 принятия решения предназначена для разделения классифицированных сигналов на сигналы от объектов и помехи в соответствии с заданными настройками и управления исполнительным устройством 21. При распознавании «полезного» сигнала от объекта схема 20 принятия решения формирует кодовую последовательность в виде сигнала «Тревога» или информационного сообщения о классе объекта и расстоянии между ним и излучателем. Если какой-то класс объектов при настройке задан как помеха (например, определенный тип животных), то схема 20 принятия решения кодовую последовательность не формирует. Выход схемы 20 принятия решения соединяется с входом исполнительного устройства 21 и с входом амплитудного модулятора 16.
Классификатор 19 и схема 20 принятия решения могут быть реализованы в микропроцессоре (например, микроконтроллер MSP 430 фирмы Texas Instruments).
Выход исполнительного устройства 21 соединен с входом коммутатора 7, с входом амплитудного модулятора 16 и входом усилителя 15 мощности.
Устройство работает следующим образом.
В исходном состоянии («дежурном» режиме) передатчик 14 вырабатывает электромагнитные колебания, которые через направленный ответвитель 4 излучаются излучателем 3 на заданной частоте излучения при мощности излучения РΣдеж. На выходе исполнительного устройства 21 сигнал срабатывания отсутствует.
С выхода схемы 9 вычисления коэффициента стоячей волны сигнал поступает в пороговое устройство 13. Срабатывание порогового устройства 13 по превышению амплитуды КСВ вызывает запуск системы 18 измерения дальности и классификатора 19. Система 18 определения дальности определяет расстояние от излучателя до объекта и передает полученную информацию на классификатор 19. Классификатор 19 определяет, к какому классу относится объект (человек, животное, помеха) и подает эту информацию в схему 20 принятия решения. При распознавании класса объекта как человека или животного схема 20 принятия решения вызывает включение исполнительного устройства 21 и формирует кодовую последовательность. Исполнительное устройство 21 переключает коммутатор 7, отключая усилители 8 и 12 постоянного тока, соответственно отключается схема 9 вычисления коэффициента стоячей волны, включает амплитудный модулятор 16 и усилитель 15 мощности в режим передачи сигнала «Тревога». Амплитудный модулятор 16 модулирует колебания задающего генератора 17 кодовой последовательностью, поступающей со схемы 20 принятия решения. Усилитель 15 мощности, имеющий в своем составе регулирующий элемент, позволяющий увеличивать выходную мощность передатчика, обеспечивает передачу информации по радиоканалу. Через определенное время исполнительное устройство 21 переходит в «дежурный» режим, переключает коммутатор 7 в исходное состояние, и мощность излучения передатчика 14 уменьшается.
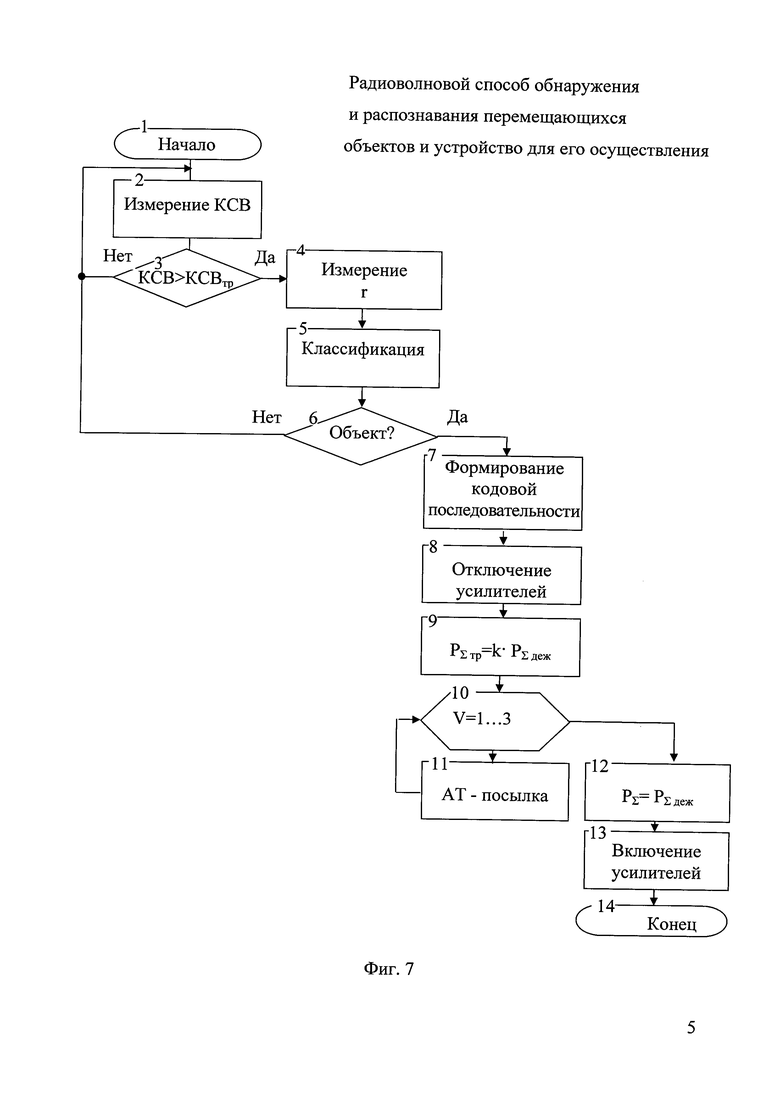
Описание алгоритма работы устройства, реализующего радиоволновой способ обнаружения и распознавания объектов (фиг. 7), включает:
1. Излучение сигнала на заданной частоте излучения с мощностью излучения РΣдеж, необходимой для обнаружения человека.
2. Измерение значения коэффициента стоячей волны.
3. Принятие решения о выполнении условия КСВ больше КСВтр: если условие выполняется, то происходит продолжение анализа сигнала, если нет - повторяется операция измерения КСВ.
4. Определение расстояния r от излучателя до объекта.
5. Классификация обнаруженного объекта по расстоянию и КСВ.
6. Принятие решения о выполнении условия о классе: если человек или животное, - то продолжение анализа, если нет - возврат на начало.
7. Формирование кодовой последовательности в виде сигнала «Тревога» или информационного сообщения о классе объекта и расстоянии между ним и излучателем.
8. Отключение усилителей 8 и 12 постоянного тока.
9. Увеличение мощности излучения с помощью усилителя мощности, необходимой для передачи сигнала «Тревога».
10. Начало мажоритарного цикла передачи сигнала «Тревога» (V=1…3).
11. Передача АТ-сигналов. Завершается мажоритарный цикл.
12. Уменьшение мощности излучения до величины, необходимой для работы РВСО в «дежурном» режиме.
13. Включение усилителей 8 и 12 постоянного тока.
14. Переход РВСО в дежурный режим.
Таким образом, предлагаемый способ и устройство для его реализации позволяют повысить помехоустойчивость за счет распознавания людей и животных при пересечении объектом объемной зоны обнаружения.
Технический результат достигается за счет совместного использования однопозиционного радиоволнового способа обнаружения и системы определения дальности с последующей классификацией перемещающегося объекта по двум признакам: коэффициенту стоячей волны и расстоянию от излучателя до объекта.
Источники информации
1. Средство БИНОМ-2П. Руководство по эксплуатации ЦКДИ. 425342.005 РЭ. 1998 - 56 с.
2. Пат. 2292600 Российская Федерация. Радиоволновой способ обнаружения перемещающихся объектов / Крюков И.Н., Онуфриев Н.В., Соколова М.А., Иванов В.А. - опубл. 27.01.2007. Бюл. №3. - 17 с.
3. Соколова М.А., Карвецкий В.Л. Модель взаимодействия излучателя с посторонним объектом // Радиотехника. Сер. Радиосистемы (журнал в журнале). Вып.85. Территориально распределенные системы охраны. - 2005. - №3. - С. 9-11.
4. Онуфриев Н.В., Скридлевский А.В., Соколова М.А. Электрофизические характеристики биологических объектов для точечного радиоволнового средства обнаружения // Радиотехника. Сер. Радиосистемы (журнал в журнале). Вып.160. Территориально распределенные системы охраны. - 2011. - №9. - С. 88-91.
5. Справочник по прикладной статистике. В 2-х т.Т.2.: Пер. с англ.; под ред. Э. Ллойда, У. Ледермана, С.А. Айвазяна, Ю.Н. Тюрина. - М.: Финансы и статистика, 1990. - 526 с.
6. Пат. 2273867 Российская Федерация. Сейсмическое устройство определения координат объектов / И.Н. Крюков, В.А. Иванов, А.К. Козинный, В.В. Матвеев. - опубл. 10.04.06, Бюл. №14. - 10 с.
7. ИК-дальномер Sharp GP2D120XJ00F IR Package R146-GP2D120 http://www.sharpsma.com/webfm_send/1205.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОВОЛНОВОЙ СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ | 2005 |
|
RU2292600C1 |
| РАДИОВОЛНОВОЙ ДОПЛЕРОВСКИЙ ОБНАРУЖИТЕЛЬ | 2015 |
|
RU2610146C1 |
| ДВУХЧАСТОТНОЕ ИМПУЛЬСНО-ДОПЛЕРОВСКОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2015 |
|
RU2594383C1 |
| Способ и устройство предупреждения столкновений транспортного средства | 2019 |
|
RU2707970C1 |
| РАДИОВОЛНОВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ЧАСТОТНО-МОДУЛИРОВАННЫХ КОЛЕБАНИЙ | 2014 |
|
RU2584496C1 |
| СИСТЕМА БЛИЖНЕЙ ЛОКАЦИИ ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2013 |
|
RU2535302C1 |
| Панорамный измеритель коэффициента стоячей волны и ослаблений | 1989 |
|
SU1749850A1 |
| Устройство для микроволновой терапии | 1988 |
|
SU1681856A1 |
| СТАНЦИЯ РАДИОЭЛЕКТРОННОЙ РАЗВЕДКИ И ПОДАВЛЕНИЯ | 1998 |
|
RU2150178C1 |
| Устройство непрерывного контроля амплитудно-частотных характеристик каналов связи | 1985 |
|
SU1241500A2 |
Изобретение относится к техническим средствам охраны и может быть использовано для обнаружения и распознавания перемещающихся объектов на охраняемом рубеже. Радиоволновой способ обнаружения и распознавания перемещающихся объектов (человека и животных) заключается в том, что с целью определения наличия перемещений посторонних объектов проводится анализ характеристик электромагнитного поля в зоне контроля излучателя, в частности коэффициента стоячей волны. На основании двумерного пространства признаков данных об амплитуде коэффициента стоячей волны и расстояния до объекта методом линейного дискриминанта принимается решение о классификации объекта обнаружения. Устройство, реализующее предлагаемый способ обнаружения и распознавания перемещающихся объектов, содержит измеритель коэффициента стоячей волны, измеритель падающей и отраженной волн, излучатель, направленный ответвитель, два амплитудных детектора, два фильтра нижних частот, коммутатор, два усилителя постоянного тока, схему вычисления коэффициента стоячей волны, пороговое устройство, передатчик, усилитель мощности, амплитудный модулятор, задающий генератор, систему определения дальности, классификатор, схему принятия решения, исполнительное устройство. Технический результат достигается за счет совместного использования однопозиционного радиоволнового способа обнаружения и системы определения дальности с последующей классификацией перемещающегося объекта по двум признакам: коэффициенту стоячей волны и расстоянию от излучателя до объекта. 2 н.п. ф-лы, 7 ил.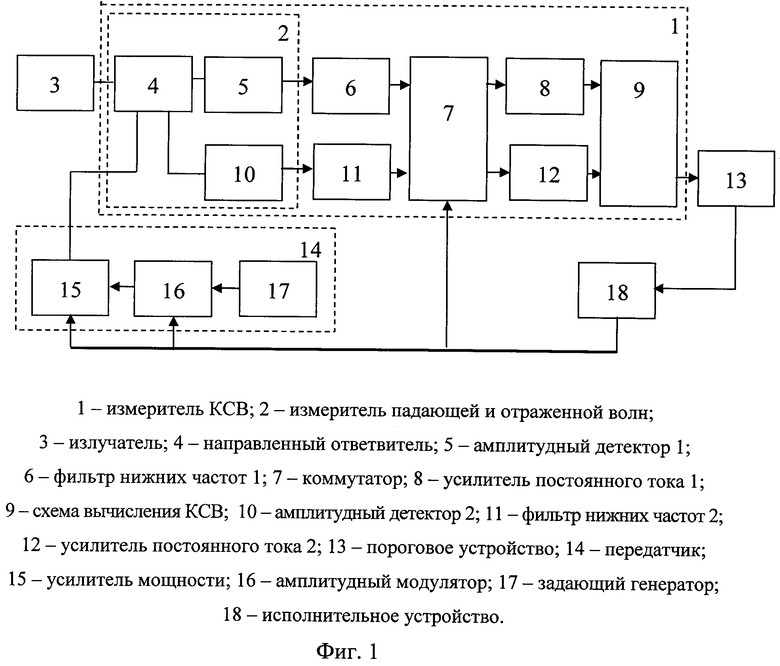
1. Радиоволновой способ обнаружения и распознавания перемещающихся объектов, заключающийся в регистрации изменений характеристик электромагнитного поля вокруг излучателя путем измерения коэффициента стоячей волны, отличающийся тем, что дополнительно определяется расстояние от излучателя до объекта обнаружения и распознавание осуществляется по двум признакам: коэффициенту стоячей волны и расстоянию от излучателя до объекта.
2. Устройство для осуществления способа по п. 1, содержащее измеритель коэффициента стоячей волны, измеритель падающей и отраженной волн, излучатель, направленный ответвитель, два амплитудных детектора, два фильтра нижних частот, коммутатор, два усилителя постоянного тока, схему вычисления коэффициента стоячей волны, пороговое устройство, передатчик, усилитель мощности, амплитудный модулятор, задающий генератор, исполнительное устройство, где излучатель соединяется с направленным ответвителем, имеющим четыре плеча, к которым помимо излучателя подключены усилитель мощности и амплитудные детекторы, амплитудные детекторы через фильтры нижних частот соединяются с коммутатором, коммутатор соединяется с усилителями постоянного тока, усилители постоянного тока соединяются со схемой вычисления КСВ, схема вычисления КСВ соединяется с входом системы определения дальности, исполнительное устройство соединяется с входом коммутатора, с входом амплитудного модулятора и входом усилителя мощности, отличающееся тем, что для решения задачи распознавания человека в условиях воздействия животных введены система определения дальности, классификатор и схема принятия решения, где система определения дальности соединяется с входом классификатора, классификатор соединяется с входом схемы принятия решения, схема принятия решения соединяется с входом исполнительного устройства и с входом амплитудного модулятора.
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ ПРИ ИХ ВТОРЖЕНИИ В ОХРАНЯЕМУЮ ЗОНУ | 2013 |
|
RU2559701C2 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ | 2010 |
|
RU2456637C1 |
| US 20060273255 A1 07.12.2006. | |||

