Изобретение относится к робототехнике и может быть использовано при автоматизации различных технологических процессов.
Целью изобретения является упрощение конструкции.
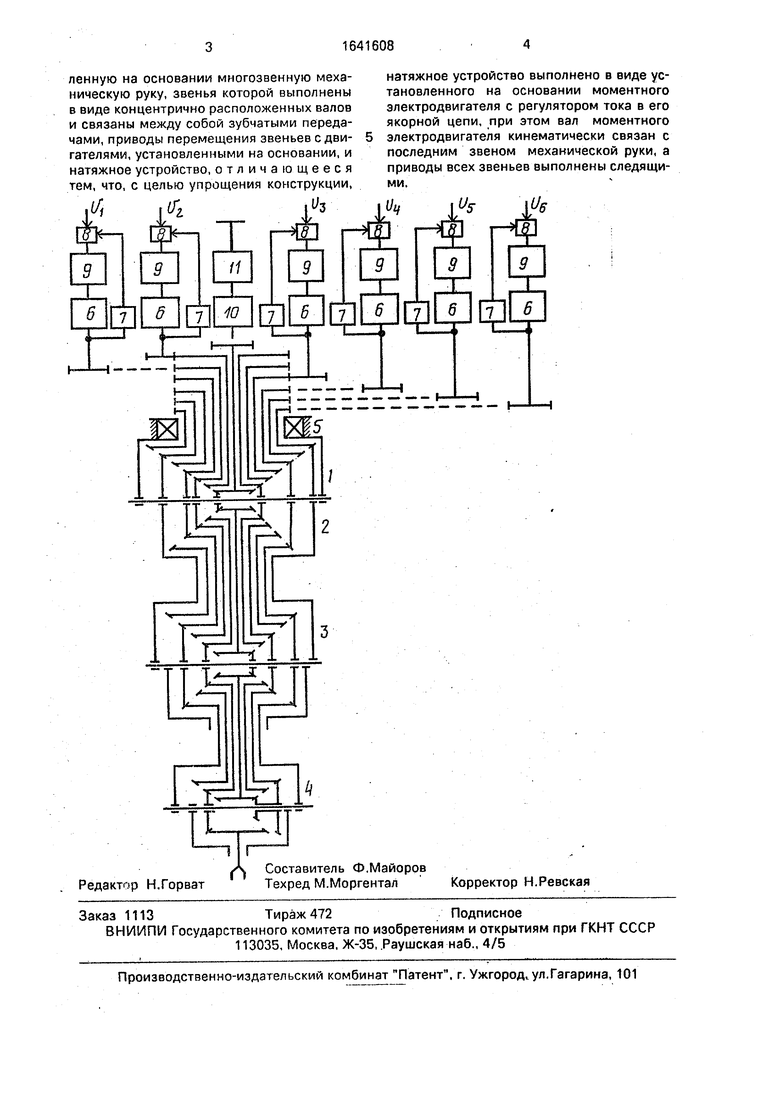
На чертеже изображена функционально-кинематическая схема манипулятора.
Манипуляционное устройство содержит многозвенную механическую руку, состоящую из звеньев 1 -4, установленных на основании 5 и состоящих из концентрично расположенных валов. Валы смежных звеньев связаны между собой зубчатыми передачами. Все звенья снабжены следящими приводами их перемещения, каждый из которых включает установленный на основании двигатель 6, датчик положения 7, блок сравнения 8 и усилительно корректирующий блок 9. Валы двигателей 6 кинематически связаны с соответствующими концентрично расположенными валами, установленными в первом звене.
Кроме того, манипуляционное устройство содержит натяжное устройство, включающее установленный на основании момен- тный электродвигатель 10 с регулятором тока 11 в его якорной цепи, вал которого кинематически связан с последним звеном 4 механической руки LH, U2. Уз. Щ, Us и Ue - сигналы резания задания.
Манипуляционное устройство работает следующим образом.
Моментный электродвигатель 10 натягивает кинематическую-цепь, замкнутую на последнее звено механической руки. В результате создаются реактивные моменты во всех шарнирах руки. Эти моменты стремятся повернуть датчики положения 7 следящих приводов с нулевых отметов. В результате этого двигатели 6 развивают встречные моменты и все кинематические цепи натягиваются. За счет регулятора тока в якорной цепи электродвигателя 10 выбирается значение момента, необходимое для выбора зазоров, и повышение тем самым точности позиционирования.
Формула изобретения
Манипуляционное устройство для промышленных роботов, содержащее установО
Јь
Ј О 00
ленную на основании многозвенную механическую руку, звенья которой выполнены в виде концентрично расположенных валов и связаны между собой зубчатыми передачами, приводы перемещения звеньев с двигателями, установленными на основании, и натяжное устройство, отличающееся тем, что, с целью упрощения конструкции,
натяжное устройство выполнено в виде установленного на основании моментного электродвигателя с регулятором тока в его якорной цепи, при этом вал моментного электродвигателя кинематически связан с последним звеном механической руки, а приводы всех звеньев выполнены следящими.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Манипулятор | 1982 |
|
SU1068280A1 |
| Способ позиционно-силового управления подводным аппаратом с многозвенным манипулятором для выполнения контактных манипуляционных операций с подводными объектами | 2022 |
|
RU2789510C1 |
| Манипулятор | 1988 |
|
SU1569222A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2004 |
|
RU2258599C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2004 |
|
RU2257288C1 |
| Манипулятор с программным управлением | 1978 |
|
SU733975A1 |
| Самонастраивающийся электропривод манипулятора | 2016 |
|
RU2631784C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2002 |
|
RU2212329C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2004 |
|
RU2258600C1 |
Изобретение относится к робототехнике и может быть использовано при автоматизации различных технологических процессов. Целью изобретения является упрощение конструкции. Создаваемый на валу моментного двигателя натяжного устройства регулируемый момент создает реактивные моменты во всех шарнирах механической руки, состоящей из звеньев, которые уравновешиваются моментами двигателей следящи приводов этих звеньев, чем обеспечивается выбор зазоров в кинематических цепях механической руки. 1 ил.
/ Ер-| Т
з
Редактор Н.Горват
Составитель Ф.Майоров Техред М.Моргентал
J JL Ј пШ
Корректор Н.Ревская
| Манипулятор | 1982 |
|
SU1068280A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
