Изобретение относится к машинестроению и может быть использовано в дистанционно управляемых манипуляторах и робототехнических устройствах.
Известен манипулятор, содержащий основание, многозвенную механическую руку, звенья которой выполнены в виде концентричных валов и последовательно связаны зубчатыми передачами, блок приводов, кинематически связанных с концентричными валс1ми первого звена механической руки, натяжное устройство, содержащее блок дифференциалов и натяжную кинематическую цепь, содержащую упругий элемент и элемент, связанный с последним звеном механической руки f1
Недостатком известного технического решения является отсутствие, телескопического вьщвижения звеньев механической руки, что,существенно снижает функциональные возможности манипулятора из-за невозможности увеличения зоны обслуживания.
Целью изобретенияявляется расширение функциональных возможностей.
Указанная цель достигается тем, что механическая рука снабжена по меньшей мере одним дополнительным звеном, выполненным в виде концентрично расположенных телескопических валов, причем внутренний вал этого дополнительного звена входит в натяжную кинематическую цепь, а устройство развязки движений исполнительных звеньев и блок дифференциалов снабжены каждый дополнительными дифференциалами, а блок приводов - дополнительным приводом, кинематически связанным с этими дифференциалами, причем в натяжную кинематическую цепь входит несамотормозящая винтовая передача.
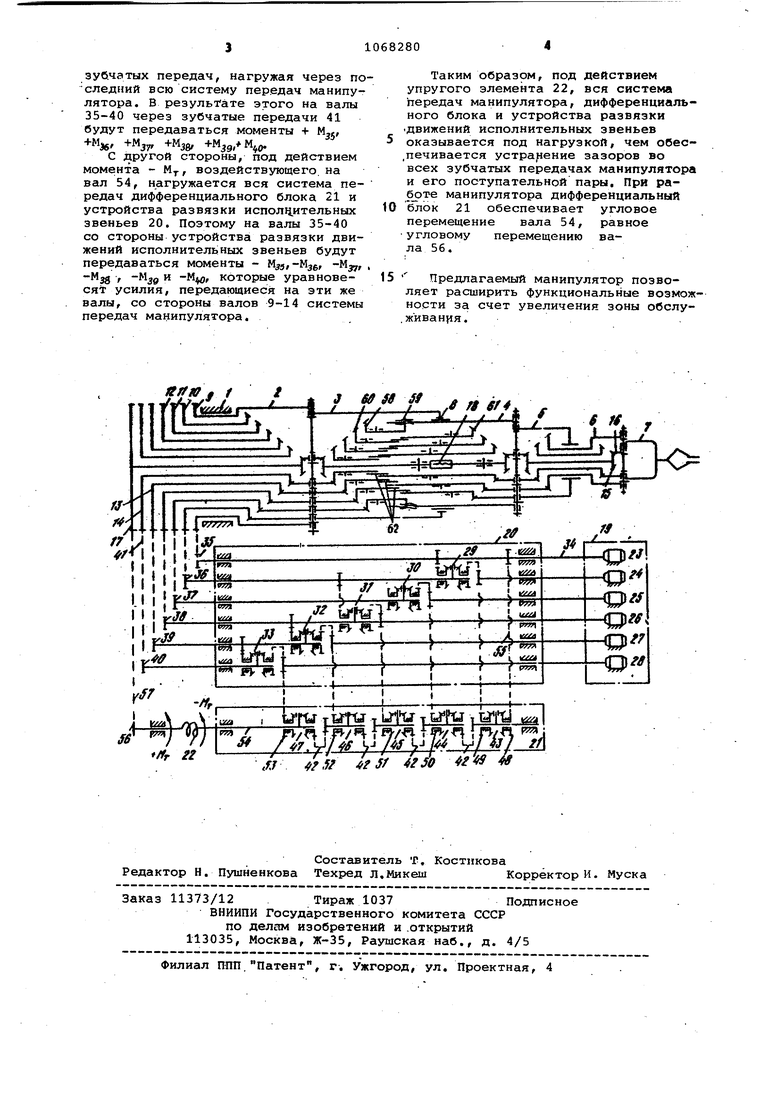
. На чертеже изображена кинематическая схема манипулятора.
Манипулятор содержит механическую руку, смонтированную на основании 1 и образованную из последовательно соединенных исполнительных звеньев 2-7. Основание 1 и звенья 2-7 вьтолнёны в виде концентричных валов. Валы 3 и 4 образуют поступательную кинематическую пару 8, выполненную в виде телескопического соединения. От исполнительных звеньев к основанию манипулятора проходит система зубчатых передач, оканчивающаяся валами 9-14. Для силового натяжения всех передач манипулятора в его состав входит натяжное устройство, состоящие из натяжной кинематической цепи и блока дифференциалов. Натяжная кинематическая цепь начинается-с шестерни 15, которая зацепляется с зубчатым сектором 16, укрепленным на последнем
валу 7, и оканчивается выходным валом 7. В состав натяжного канала зубчатых передач входит несамотормозящая винтовая передача 18, расположенная на участке между валами 3 и 4, входящими в поступательную кинематическую пару.
На основании манипулятора установлены силовой блок 19 приводов, устройство 20 развязки движений испол0 нительных звеньев, дифференциальный блок 21 и упругий элемент 22. Силовой блок 19 приводов содержит.двигатели 23-28. Устройство развязки движений исполнительных звеньев 20
5 состоит из системы зубчатых дифференциалов 29-33, кинематически связанных с двигателями блока 19 приводов входными валами 34, а также имеет выходные валы 35-40, которые прсред-J ством зубчатых передач 41 кинематически связаны с валами 9-14. системы передач манипулятора. Дифференциальный блок 21 состоит из последовательно соединенных зубчатыми передачами,
г 42 зубчатых дифференциалов 43-47. Дифференциальный блок имеет входные валы 48-53 и выходной вал 54.Входными валами дифференциальный блок кинематически.связан передачами 55 с входными валами 34 устройства
0 развязки движений исполнительных звеньев 20, а выходным валом 54 с упругим элементом 22. Упругий элемент 22 через вал 56 и передачу 57 кинематически связан с выходным
5 валом 17 натяжного канала зубчатых передач.
Коническая шестерня 58 соединена с валом 4 руки манипулятора элементом, преобразующим вращательное дви0 жение в поступательное. На чертеже в качестве этого элемента изображена винтовая пара 59. Для того, что.бы
передачи, проходящие через звенья поступательной пары, не стесняли
с их взаимного движения, валы этих передач должны допускать пoqтyпaтeльнoe перемещение, поэтому конические шестерни 60 и .61 соединены между собой поступательными парами 62, выполненными в виде телескопического соеди нения.
Манипулятор работает следующим образом,
При включении блока приводов 19 крутящие моменты передаются через
5 валы 34 устройству развязки движений исполнительных звеньев 20, откуда через выходные валы 36-40 этого устройства и связанные с ним зубчатые передачи 41 и валы 9-14 переда0 ются на исполнительные звенья 2-7 руки манипулятора.
Момент - MT , действующий со стороны упругого элемента 22 на вал 56, посредством зубчатой передачи 57 пе5 редается на вал 17 натяжного канала
зубчатых передач, нагружая через последний всю систему передач манипулятора. В результате этого на валы 35-40 через зубчатые передачи 41 будут передаваться моменты + М,,,
-MIS +МЗУ, +Мзв, ,м
с другой стороны, под действием момента - М, воздействующего, на вал 54, нагружается вся система передач дифференциального блока 21 и устройства развязки исполч.ительных звеньев 20. Поэтому на валы 35-40 со стороны устройства развязки движений исполнительных звеньев будут передаваться моменты - ,-Мзб, -М,, Мз8 Мав и -М, которые уравновесят усилия, передающиеся на эти же валы, со стороны валов 9-14 системы передач манипулятора.
Таким образом, под действием упругого элемента 22, вся система передач манипулятора, дифференциального блока и устройства развязки движений исполнительных звеньев 5 оказывается под нагрузкой, чем обес.печивается устранение зазоров во всех зубчатых передачах манипулятора и его поступательной пары. При раpjoTe манипулятора дифференциальный 0 блок 21 обеспечивает угловое
перемещение вала 54, равное угловому перемещению вала 56.
5 Предлагаемый манипулятор позволяет расширить функциональные возможности за счет увеличения зоны обслу.живан}1я.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1983 |
|
SU1138312A1 |
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Манипулятор | 1981 |
|
SU975385A2 |
| Податливый дифференциальный шарнир манипулятора с силомоментным очувствлением | 2021 |
|
RU2803718C2 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403143C2 |
| Устройство для оринтации захвата манипулятора | 1977 |
|
SU707793A1 |
| Рука манипулятора | 1985 |
|
SU1256961A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
1. МАНИПУЛЯТОР, содержащий основание, многозвенную механическую руку, звенья которой выполнены в виде концентричных валов и последовательно связаны зубчатыми передачами, блок приводов, кинематически связанных с концентричными валами первого звена механической руки, натяжное устройство, содержащее блок дифференциалов и натяжную кинематическую цепь, имеющую упругий элемент и элемент, связанный с последним звеном механической руки, и устройство развязки движений исполнительных звеньев, отличающийс я тем, что, с целью расширения функциональных возможное- эй, механическая рука снабжена по меньшей мере одним дополнительным звеном, выполненным в виде концентрично расположенных телескопических валов, цричем внутренний вал этого дополнительного звена входит в натяжную кинематическую цеп-ь, а устройство развязки движений исполнительных звеньев и блок дифференциалов снабжены каждый дополнительными дифференциалами, а W блок приводов - дополнительным приводом, кинематически связанным с этими дифференциалами. 2. Манипулятор по п.1, от л и чающийся тем, что в натяжную кинемат;ическую цепи входит несамотор мозящаяся винтовая пара.
f
li -/-i /
Tj aiaSarr
i I
. ыТЬг TtfnJ TJJlu TEJfa тШ
ЛлП fF/ fTV
. у s у / y/ /J/ /;
/,L 48
JJ /,f/
