Изобретение относится к машиностроению, а именно к промышленным роботам, применяемым для автоматизации технологических процессов, в частности для обработки обпоя, опиловки заусенцев, полировки и т.д.
Известны технические решения, в которых с целью обеспечения высоких динамических характеристик и точностных параметров манипулятор содержит основание с размещенными на нем приводами и многозвенную механическую руку, звенья которой последовательно связаны с приводами зубчатыми передачами и блоками дифференциалов,реализующими кинематическую развязку движений испол- иите.льных звеньев и натяжную кинематическую цепь для выборки зазоров.
Недостатком этих решений является их высокая конструктивная сложность, поэтому такие манипуляторы промышленного применения практически не получили. При
этом выборка зазоров обеспечивается только Б начальный период эксплуатации, поскольку износ зубчатых передач основной и натяжной кинематических цепей приводит к появлению зазоров в исполнительных механизмах манипулятора.
Наиболее близким к предлагаемому техническому решен ию я в л яетгся промышленный робот с шарнирно сочлененной рукой, принятый за прототип
Робот содержит установленный на основании подвижный корпус, с которым шпр- нирно сочленено nepVoe плечо руки, -ta конце которого на шарнире установлено предплечье руки. На переднем конце предплечья расположена кисть руки, а на другом -приводы. Выходные валы приводов и входные валы кисти соединены гибкими связями, например цепями, снабженными компенсаторами удлинения цепей
Недостатком такой конструкции следует считать то, что обеспечивается только чаw
Х|
стичное улучшение динамических характеристик за счет уравновешивания предплечья руки робота путем рггмещеиия приводов и исполнительных механизмов кисти, кинематически связанных гибкими связями, на противоположных концах предплечья. При этом данная конструкция руки не обеспечивает ротацию кисти, причем механизм ротации целесообразно бы размещать перед механизмом качания кисти, поскольку такое сочетание исполнительных механизмов руки обеспечивает широкие технологические возможности робота, на- примерТэбработку конических, сферических или наклонных поверхностей при операциях по опиловке заусенцев. Попытка снабдить данную руку механизмом ротации кисти неосуществима, поскольку для этого необходимо прерывать имеющиеся гибкие связи либо разместить привод качания непосредственно на корпусе кисти, что резко ухудшит динамические характеристики руки. Любые другие решения приводят либо к зависимым кинематическим цапям, значительно усложняющим управление роботом, либо к усложнениям конструкции, о которых сказано выше.
Целью изобретения является улучшение динамических характеристик с одновременным расширением технологических возможностей робота.
Это достигается тем, что предплечье руки снабжено двумя шарнирными муфтами, полумуфгы которых имеют возможность вращения одна относительно другой, а гибкие связи выполены в виде состоящих из двух частей четырех гибких звеньев, образующих две приводные и две уравновешивающие незамкнутые ленты, соединенные с шарнирными муфтами, причем на первой полумуфте каждой муфты диаметрально противоположно закреплены концы одной приводной и одной уравновешивающей частей лент, противоположные концы которых закреплены на валу качания, а ко второй полумуфте аналогично присоединены другие части лент, противоположные концы которых закреплены попарно на приводном и уравновешивающем -шкивах.
Снабжение предплечья руки двумя шарнирными муфтами, соединяющими незамкнутые, состоящие из двух частей две приводные и две уравновешивающие металлические ленты, позволяет передавать крутящий момент от двигателя на зал качания кисти через механизм ротации при обеспечении независимости кинематических цепей. Этим достигается возможность переноса двигателя с корпуса кисти на предплечье, что повышает динамические
характеристики робота. При этом обеспечивается расширение технологических возможностей робота за счет снабжения руки дополнительной степенью подвижности ротацией кисти, которая позволяет эффективно использовать робот при обработке наклонных, винтовых, конических, сферических и других поверхностей,,достигается высокая точность исполнительных
механизмов руки, поскольку обеспечивается беззазорная передача вращения от двигателей на механизмы ротации и качания.
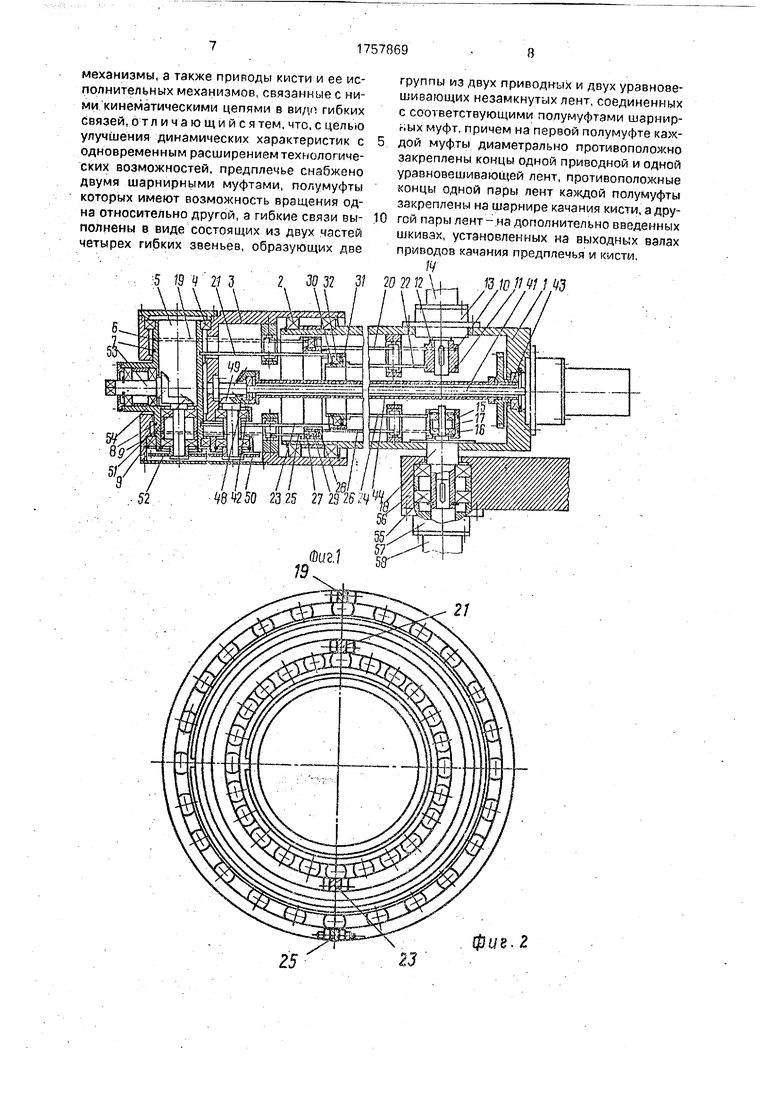
На фиг.1 изображено предплечье модуля руки робота, разрез; на фиг,2 - узел крепления лент с полумуфтой шарнирной муфты;
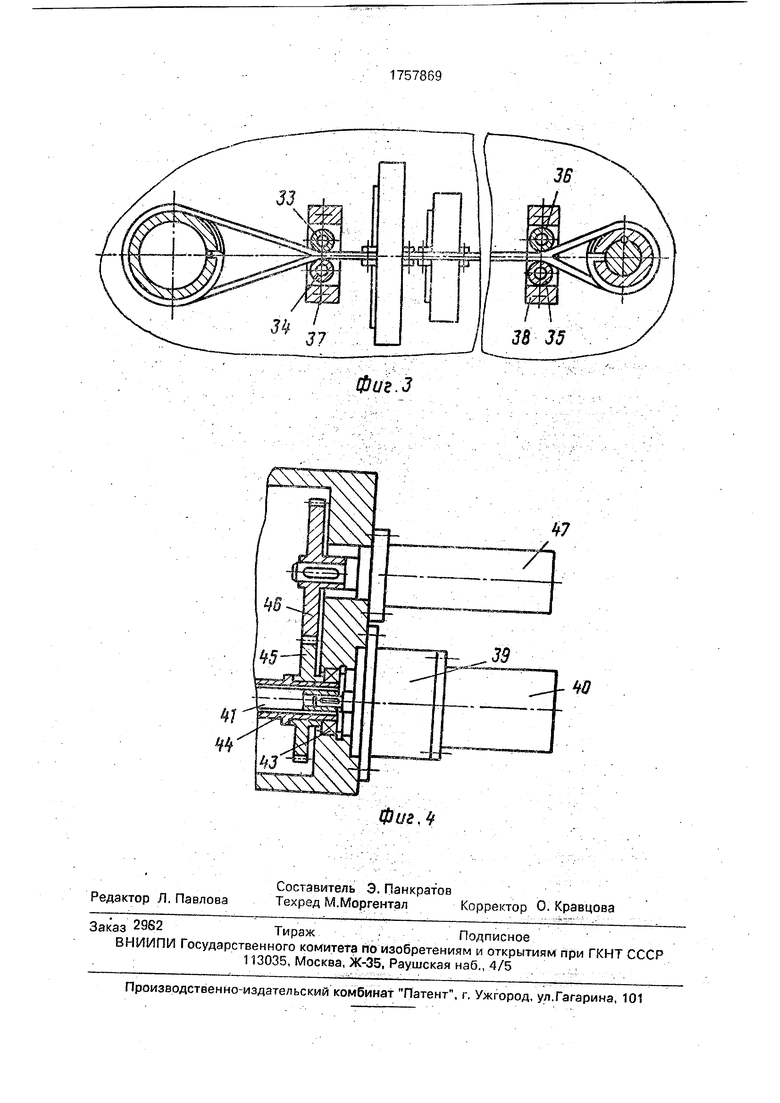
на фиг.З - узел направляющих роликов; на
фиг.4 - соединение электродвигателей с
приводными валами ротации и шпинделя.
Модуль руки робота содержит (фиг,1)
корпус 1 предплечья, установленный на подшипниках 2, корпус 3 кисти, в котором размещен поворачивающийся на подшипниках А полый вал 5 качания. На валу 5 выполнены шкивы 6, 7, 8, 9. Шкивы 6, 7
связаны гибкими связями, например, металлическими лентами, с приводными шкивами 10,11, выполненными на ступнице .установленной на выходном валу редуктора TJ С электродвигателем 14, Шкивы 8, 9 связаны
со шкивами 15, 16 уравновешивающего шкива 17, установленного нз валу предплечья 18, жестко связанном с корпусом 1. Каждое из четырех гибких звеньев выполнено незамкнутым и состоит из двух частей,
Гибкие звенья, образованные лентами 19,
20 и 21, 22, являются приводными, а звенья,
состоящие из лент 23, 24 и 25, 26, образуют
уравновешивающую кинематическую цепь.
Внутренние концы лент 19, 25 и 20, 26
соединены соответственно с полумуфтами 27, 28 шарнирной муфты, вращающимися одна относительно другой нз подшипнике 29. Причем концы лент закреплены на полумуфтах диаметрально противоположно
(фиг,2), что позволяет уравновешивать шарнирную муфту в любом положении при вращении корпуса 3 кисти относительно продольной оси руки. Аналогичным образом соединены ленты 21, 23 и 22, 24 с полумуфтамй 30, 31, обеспечивается поворот вала 5 в противоположном направлении. Позицией 32 обозначен подшипник.
В пределах величины осевого перемещения шарнирных муфт, определяемого углом поворота вала 5, ленты сориентированы направляющими роликами 33, 34 и 35, 36, вращающимися на кронштейнах 37, 38, в плоскости, проходящей через ось ротации кисти (фиг.З). На торце корпуса 1 предплечья установлен редуктор 39 с электродвигателем 40, приводящий во вращение вал 41, жестко закрепленный на корпусе 3 кисти (фиг,4). На езлу 41 на подшипнике 42 и в корпусе 1 на подшипнике 43 установлен полый вал 44, на одном конце которого ус- тановлено .убчатое колесо 45, зацепляющееся с зубчатым колесом 46, закрепленным на валу электродвигателя 47. Другой конец вала соединен с конической шестерней 48, входящей в зацепление с вал-шестерней 49, несущей зубчатое колесо 50. Внутри полого вала 5 размещены вал-шестерня 51 с зубчатым колесом 52 и шпиндель 53 с коническим колесом 54. Вал предпчечья 18, установленный на подшипниках 55 в основании 56 ру- ки, соединен редуктором 57 с электродвигателем 58
Модуль руки промышленного робота работает следующим образом.
Вращением электродвигателя 58 с ре- дуктором 57 обеспечивается поворот вала предплечья 18 с корпусом 1 относительно основания 56 (фиг.1) Ротация кисти предплечья осуществляется передачей вращения or электродвигателя 40 через редуктор 19, вал 41 на корпус 3, который, поворачиваясь на подшипниках 2, изменяет положение, схвагэ WIH инструментального шпинделя (не показаны), устанавливаемых ча выходной конец вала 5 качания и получающих приводное движение от шпинделя 53.
Движение качания схвата или инструментального шпинделя осуществляется поворотом на подшипниках 4 вала 5 качания, получающего вращение от электродвигате- ля 14 через редуктор 13 и ступицу 12, которая, поворачиваясь, сматывает или наматывает закрепленные на шкивах 10 и 11 части приводных лент 20 и 22. Последние, перемещая в противоположных на- правлениях шарнирные гуфты, приводят в движение ленты 19 и 71, обеспечивая поворот вала 5. Плоскопараллельное перемещение шарнирных муфт вдоль оси ротации кисти обеспечивается одновременным пе- ремещением за счет шкивов 8, 9, 15, 16 уравновешивающих лент 23,25 и 24,26. При этом за счет возможности вращения полумуфт 27 и 30 относительно полумуфт 28 и 31 достигается передача крутящего момента на вал 5 при повороте лент 19, 21 и 23, 25 вместе с корпусом 3 с обеспечением независимости перемещений приводов качания и ротации.
Вращение шпинделя 53 осуществляет- ся от электродвигателя 47 через зубчатые колеса 45, 46, попый вял 44, коническую шестерню 48, вал-шестерню 49 зубчатые колеса 50, 52, вэл-шесгерию 51 и коническое колесо 54,
Предлагаемое техническое решониг имеет существенные отличия от прототипа закпю яющиеся в том, что предплечье руки снабжено двумя шарнирными муфтами, по лумуфты которых имеют возможность ара щения одна относительно другой, соединяющими незамкнутые, состоящие из двух частей две приводные и две урапносе шивающие ленты, причем на пррчой пплу- муфте каждой муфты диаметрально протигоположно закреплены концн одной приводно и одной уравновеширающей ча- СГРЙ п.ечт, противоположные концы которых закреплены на валу качания, а на рторои полумуфте аналогично присоединены другие части лент, противоположные концы которых попарно закреплены на приводном и уравновешивающем шкивах, при этом ленты сориентированы направляющими роликами Описанная совокупность существенных отличий позволяет иметь следующие преимущества предлагаемого решения: улучшить динамические характеристики робота за счет обеспечения возможности переноса двигателя с корпуса кисти на предплечье при сохранении независимости кинематических цепей ротации и качания;
расширить технологические возможности робота за счет сообщения руке дополнительной степени подвижности, т.е. ротации кисти; обеспечить высокую точность исполнительных механизмов руки путем беззазорной передачи вращения металлическими лентами;
обеспечить доступность кисти робота в ограниченные зоны, поскольку возможность выноса двигателе на предплечье руки позволяет уменьшить габариты.
Изобретение-разработано в Томском филиале НИИТМ в процессе выполнения НИОКР по теме 0 608-90 в соответствии с отраслевой комплексной программой технологического обновления и автоматизации произродства на 1990 - 1995 г. Модула руки применен в многоцелевом адаптивном роботе. В 1991 г. будет изготовлен экспериментальный образец, а в 1992 - 1993 г запланировано изготовить и внедрить на предприятиях отрасли 50 адаптивных промышленных роботов для автоматизации чистных операций на литых деталях.
Изобретение может быть широко использовано в других типах роботов во всех областях машиностроения.
Формула изобретения Модуль руки промышленного робота, содержащий основание с приводом предплечья, шарнирно связанного с основанием, кисть, шарнирно связанную с предплечьем и несущую исполнительные
механизмы, а также приводы кисти и ее исполнительных механизмов связанные с ними кинематическими цепями в вид гибких связей, отличающий с я тем, что, с целью улучшения динамических характеристик с одновременным расширением технологических возможностей, предплечье снабжено двумя шарнирными муфтами, полумуфты которых имеют возможность вращения одна относительно другой, а гибкие связи выполнены в виде состоящих из двух частей четырех гибких звеньев, образующих две
5 19 Ч 21 3 2, 30 32 3/
группы из двух приводных и двух уравновешивающих незамкнутых лент, соединенных с соответствующими полумуфтами шарнир- г.ых муфт, причем на первой полумуфте каждой муфты диаметрально противоположно закреплены концы одной приводной и одной уравновешивающей лент, противоположные концы одной пэры лент каждой полумуфты закреплены на шарнире качания кисти, а другой пары лент- на дополнительно введенных шкивах, установленных на выходных валах приводов качания предплечья и кисти
/V
20 22 П
«3.W/W/0
фие.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука робота | 1991 |
|
SU1757877A1 |
| КИСТЬ РУКИ ПРОМЫШЛЕННОГО РОБОТА | 1992 |
|
RU2028932C1 |
| Кисть механической руки промышленногоРОбОТА | 1979 |
|
SU841961A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Модуль промышленного робота | 1985 |
|
SU1294600A1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1123227A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| ПОДЪЕМНИК ДЛЯ ПОГРУЖЕНИЯ ИНВАЛИДА В БАССЕЙН | 1993 |
|
RU2063376C1 |
| Промышленный робот | 1990 |
|
SU1756142A1 |
Использование- машиностроение, в частности робототехника Уравновешивание ру.и при работе осуществляется двумя шарнирными м/фтами, соединяющими части гибких лент, образующих две приводные и две уравновешивающие незамкнутые гибкие связи, причем на Каждой полумуфте диаметрально противоположно закреплены концы одной пары приводных и уравновешивающих лент, противоположные концы одной пары лент каждой полумуфты закреплены на шарнире качания кисти, а другой пэры лент - на шкивах приводов качания предплечья и кисти 4 ил.
Фиг.З
-w
| Патент США № 4637773, кл В 25 J 9/00, опублик | |||
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
