Изобретенйё относится к области машиностроения, и предназначено для механизации,и автоматизации основных и вспомогательных операций в промышленности. Известен манипулятор с программным управлением, в котором содержатся шарнирно соединенные, звенья, привод каждого из которых образован моментным двигателем и тормозной муфтой, а управление осуществляется от программного устройства по схеме следящего привода 1. Недостатком указанного манипулятора является значительная мэщность двигателей при малой скорости перемещения звеньев. Наиболее близким решением из известных к предлагаемому является ма нипулятор с программным управлением содержащий смонтированные на основании шарнирно соединенные звенья и кинематические цепи для осуществления относительных перемещений звеньев от двигателей 2. Недостаток указанного манипулятора заключается в том, что он не обладает достаточно высокими эксплуатационными качествами вследстви того, что инерционные свойства двигателя, а вернее, соотношение между моментом инерции ротора двигателя и развиваемым им моментом,даже при использовании высокомоментных и малоинерционных двигателей, не позволяют получить скорости перемещений звеньев, соизмеримые со скоростями, достигаемьп и при использовании пневмо- и гидродвигателей и позиционной системы управления. Увеличе ние же мощности двигателей .зачастую не приводит к положительному эффекту (к повышению быстродействия системы) в связи с еще более быстрым ростом отношения момента инерции ротора двигателя к развиваемому им моменту. Кроме того, вся накопленная механизмом на такте перемещений энергия гасится на тормозах, упорах и т.д. вызывая повьвненные порой ударные нагрузки в конструкции, снижает долговечность систекы. Целью изобретения является повышение эксплуатационных качеств путем увеличения скорости перемещения звеньев, уменьшения мощности двигателей и увеличения долговечности конструкции.
Цель достигается тем, что в кинематических цепях привода перемещения звеньев введены аккумуляторы механической энергии и управляемые муфты, каждая из которых установлена между приводом звена и соответствующим аккумулятором, а также тем, что межд приводом звена и соответствующим аккумулятором установлен механизм реверса, связанный с управляемой муфтой.
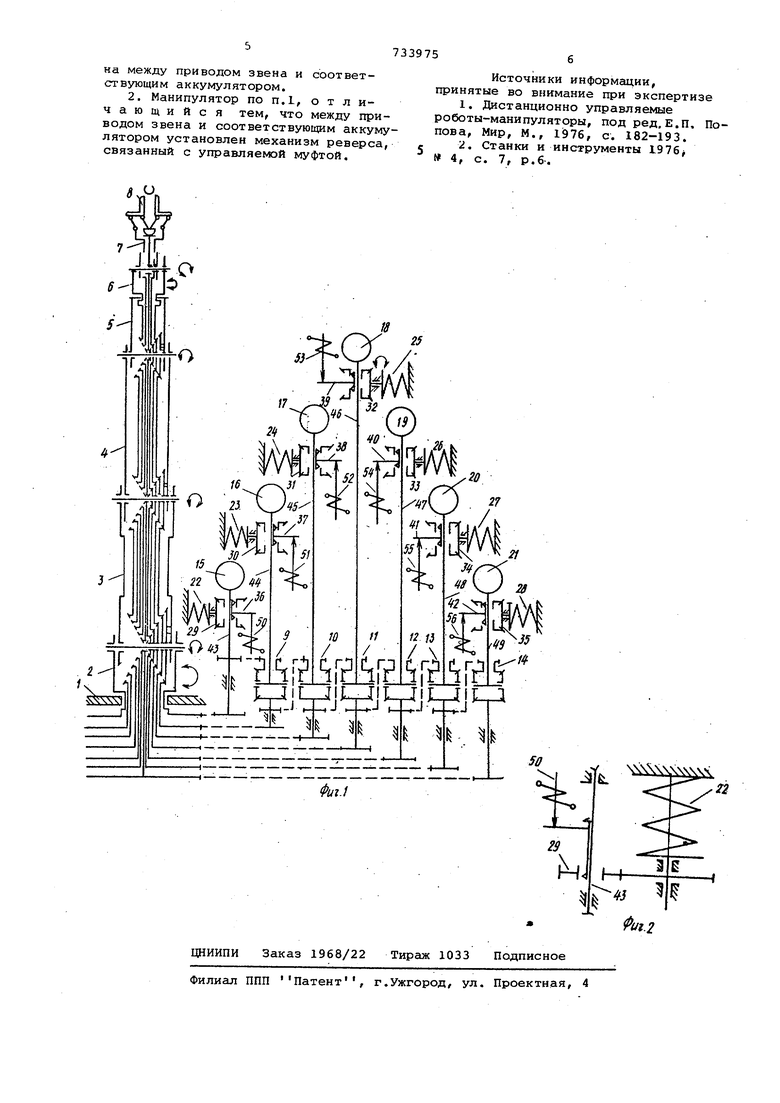
На фиг. 1 изображена кинематическая схема предлагаемого манипулятора на фиг, 2 - вариант выполнения аккум лятора и про граммы о-управляемо муфты.
Манипулятор с программным упрааэлением состоит из последовательно установленных на основании 1 и шарнирно соединенных между собой звенье 2-8. Звено 2 посредством шарнира крепится на основании 1. Там же установлены компенсирующий механизм, образованный рядом дифференциалов 9-14 и индивидуальные двигатели 1521, связанные со звеньями руки кинематическими цепями, выполненными, например, на конических передачах. Кроме того, на основании 1 установлены аккумуляторы механической энергии 22-28, выполненные, например, в виде пружины кручения, выходные звенья аккумуляторов 29-35. Механизмы реверса 36-42 установлены межд выходными звеньями аккумуляторов и кинематическими цепями приводов, в данном случае валами 43-49 двигателей 15-21. Программно-управляемые муфты 50-56 также установлены между выходными звеньями аккумуляторов и кинематическими цепями приводов,
В варианте подключения выходных звеньев аккумулятора к кинематическим цепям привода, не- содержащим механизма реверса (см.фиг.2), аккумулятор выполнен в виде пружины кручения. Аккумуляторами механической энергий могут быть оснащены приводы не всех звеньев, а только наиболее нагруженных, т.е. наиболее инерционных .
Манипулятор с программным управ/шнием работает следующим образом.
В исходном положении (перед началом работы) аккумуляторы заряжены, т.е. пружины сжаты,.их состояния зафиксированы, например, с помощью специальных тормозных устройств (на чертежах не обозначено), При поступлении команды на отработку задаваемых перемещений включаются в требуемом направлении двигатели 15-21, и к валам 43-49 подключаются выходные звенья аккумуляторов с помощью программно-управляемых муфт 50-56 та что направление моментов от. аккумуляторов 22-28 совпадает с направлением вращения валов 43-49 и с моментами двигателей 15-21. При этом происходи
интенсивный разгон системы, переход потенциальной энергии пропущенных аккумуляторов в кинематическую энергию звеньев. При отработке некоторой части требуемых перемещений программно-управляемые муфты по сигналам от системы управления переключают направление моментов от аккумуляторов, например, с помощью механизма реверса на обратное. При этом на второй части такта движения моменты от аккумуляторов- не совпададот с направлениями скоростей валов 43-49 и с моментами двигателей 15-21. Происходит торможение системы, сопровождаемое зарядкой аккумуляторов 22-28 и обратным переходом кинематической эн ергии системы в потенциальную энергию пружин. Энергия двигателей 15-21 расходуется при этом на преодоление оси трения и на подзарядку аккумуляторов. В конце -каждого такта состояние пружинных аккумуляторов опять фиксируется тормозными устройствами.
в варианте (см.фиг.2) для реверсирования момента аккумулятора исползуются собственные свойсува колебательной системы пружинный акку- . мулятор - выходное звено нккумулятора. Собственная частота этой системы значительно выше частоты системы аккумулятор - манипулятор. Поэтому при отключении ведомого звена аккумулятора 29 от вала 43 двигателя 15 и при последующем его включении через половину периода собственных колебаний системы аккумулятор - выходное звено аккумулятора пружинный аккумулятор перейдет из фазы растяжения в фазу сжатия с незначительной потерей потенциала из-за неточности включения и наличия явления затухания в системе. Эти потери компенсируются энергией, поступающей в систему аккумулятор-манипулятор на интервале движения от двигателя этой системы.
Формула изобретения
1. Манипулятор с программным управлением, содержащий смонтированные на основании шарнирно соединенные звенья и кинематические цепи привода перемещений звеньев от двигателей, отличающийся тем, что, с целью повышения эксплуатационных качеств, путем увеличения скоростей перемещения звеньев, уменьшения мощности двигателей и увеличения долговечности конструкции в кинематических цепях привода перемещения звеньев введены аккумуляторы механической энергии и управляемые луфты, каждая из которых установле
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропневматический позиционный следящий привод | 1976 |
|
SU596739A1 |
| Гидромеханическая трансмиссия транспортного средства | 1988 |
|
SU1593991A2 |
| Автоматический манипулятор с цикловым управлением | 1983 |
|
SU1151449A2 |
| Гидроинерционный трансформатор вращающего момента | 1991 |
|
SU1786301A1 |
| Механическая рука | 1982 |
|
SU1110623A1 |
| Рекуперативный тормоз | 1979 |
|
SU912971A1 |
| Манипулятор инженера М.В.Леоненко | 1986 |
|
SU1404326A1 |
| СПОСОБ УПРАВЛЕНИЯ АКСИАЛЬНО-ПОРШНЕВЫМ ДВИГАТЕЛЕМ И АКСИАЛЬНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ | 2016 |
|
RU2634974C2 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1995 |
|
RU2083850C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКООРДИНАТНЫМ ПЯТИЗВЕННЫМ МАНИПУЛЯТОРОМ | 2004 |
|
RU2288091C2 |
