И t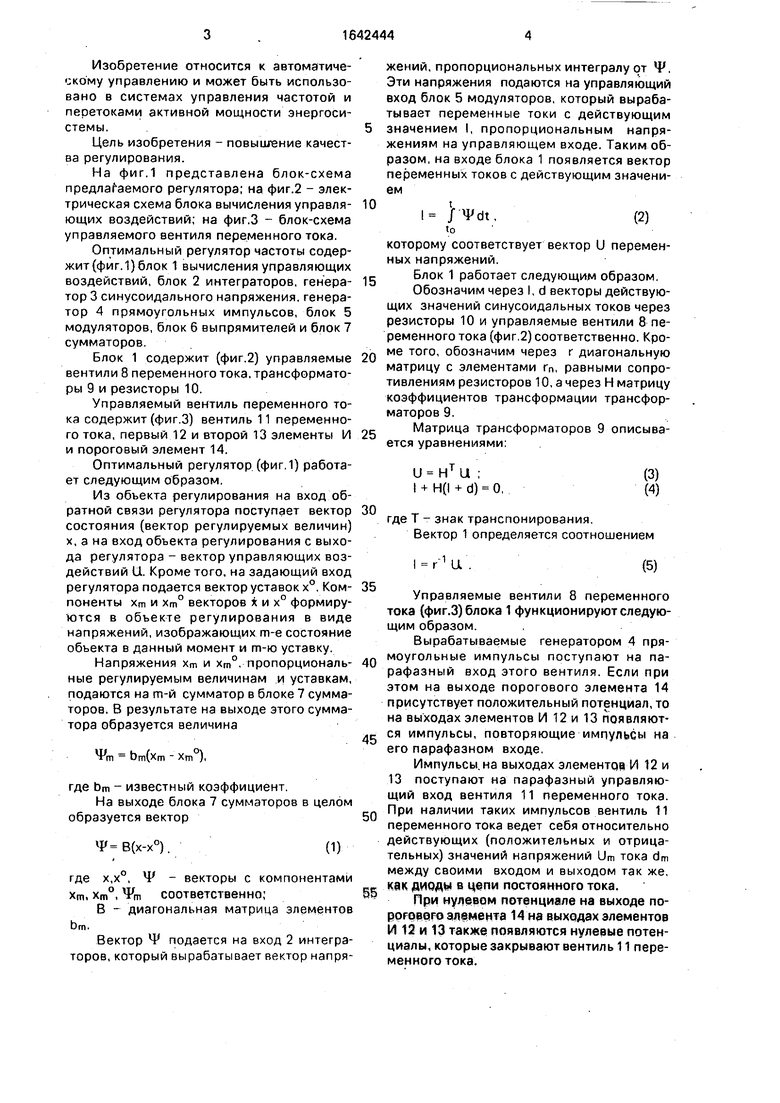
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор для оптимизации управления | 1984 |
|
SU1339492A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1427478A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 1996 |
|
RU2115218C1 |
| Устройство автоматического регулирования частоты и перетоков активной мощности в энергосистеме | 1982 |
|
SU1089698A1 |
| ФИЛЬТРО-КОМПЕНСИРУЮЩЕЕ УСТРОЙСТВО ВЫСОКОВОЛЬТНОЙ ПЕРЕДАЧИ ЭНЕРГИИ ПОСТОЯНННЫМ ТОКОМ | 2012 |
|
RU2521428C2 |
| Устройство для экстренной разгрузки линии электропередачи при аварийном снижении предела передаваемой мощности | 1982 |
|
SU1083286A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КОМПЕНСИРУЮЩЕЙ УСТАНОВКОЙ | 1992 |
|
RU2051405C1 |
| Вентильный электропривод | 1987 |
|
SU1439727A1 |
| Дешифратор для исправления ошибок | 1985 |
|
SU1305873A1 |
| Устройство для испытания механической трансмиссии | 1988 |
|
SU1585704A1 |
Изобретение относится к автоматическому управлению и может быть использовано в системах управления частотой и перетоками активной мощности энергосистемы. Цель изобретения - повышение качества регулирования. Оптимальный регулятор частоты и перетоков мощности энергосистемы содержит блок 1 вычисления управляющих воздействий, блок 2 интеграторов, генератор 3 синусоидального напряжения, генератор 4 прямоугольных импульсов, блок 5 модуляторов, блок 6 выпрямителей и блок 7 сумматоров. Цель изобретения достигается за счет введения блоков 2 и 7 и нового выполнения блока 1. 1 з.п. ф-лы, 3 ил. JT IX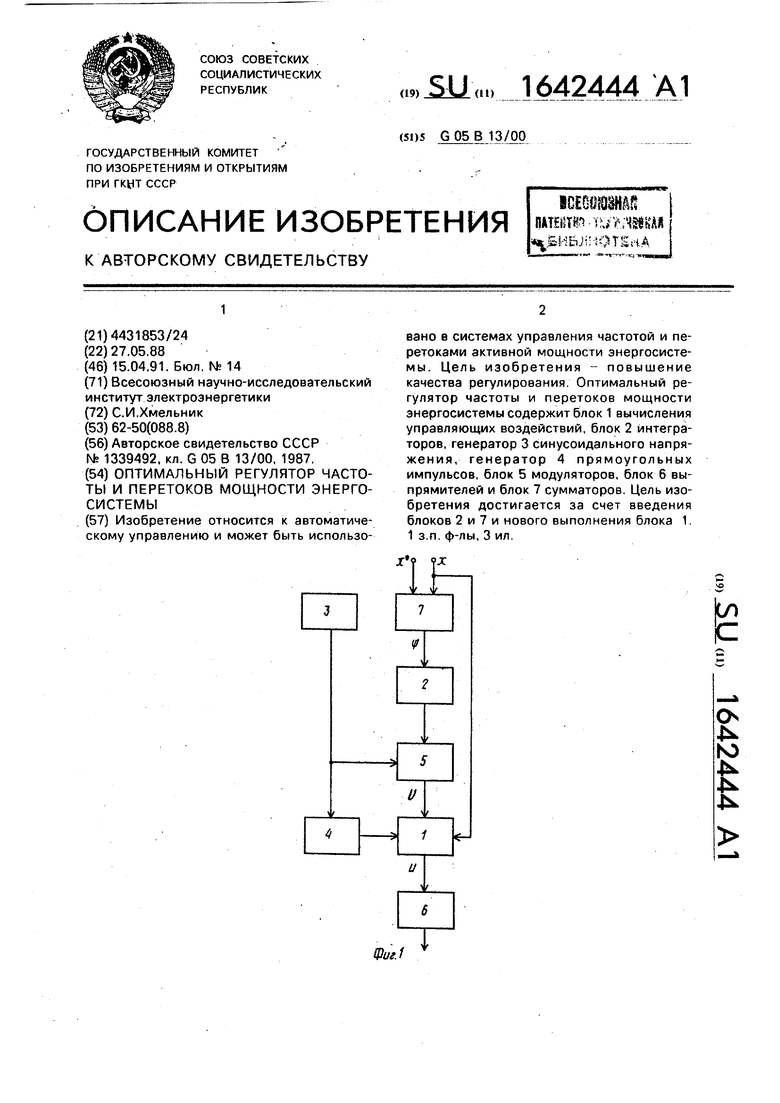
О
4Ь. KD
Јь
Jb
Фиг.
,
Изобретение относится к автоматическому управлению и может быть использовано в системах управления частотой и перетоками активной мощности энергосистемы.
Цель изобретения - повыи/ение качества регулирования.
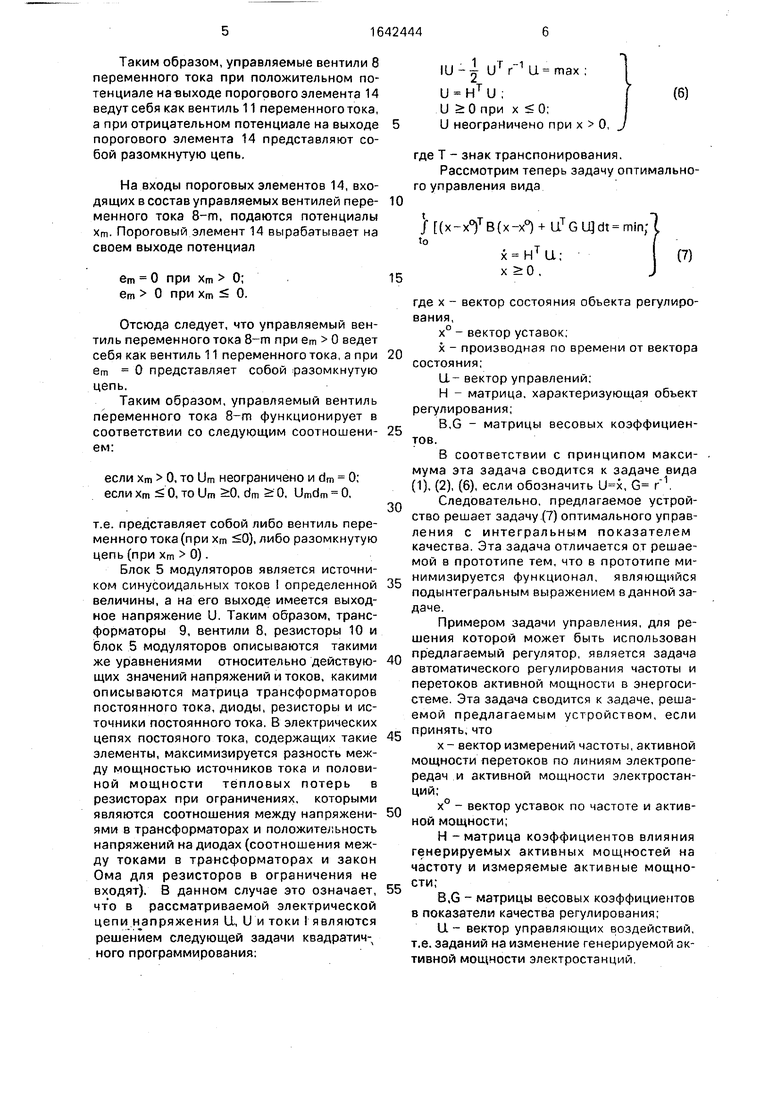
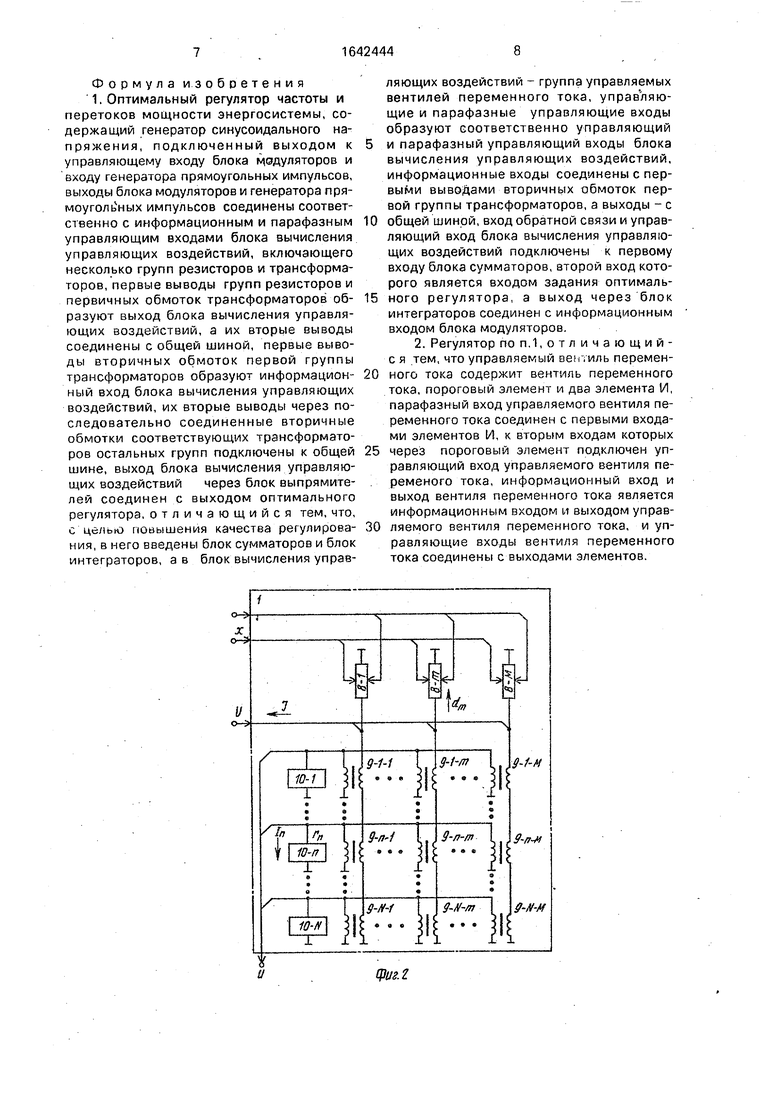
На фиг.1 представлена блок-схема предлагаемого регулятора; на фиг.2 - электрическая схема блока вычисления управляющих воздействий; на фиг.З - блок-схема управляемого вентиля переменного тока.
Оптимальный регулятор частоты содер- жит(фиг.1)блок 1 вычисления управляющих воздействий, блок 2 интеграторов, генератор 3 синусоидального напряжения, генератор 4 прямоугольных импульсов, блок 5 модуляторов, блок 6 выпрямителей и блок 7 сумматоров.
Блок 1 содержит (фиг.2) управляемые вентили 8 переменного тока, трансформаторы 9 и резисторы 10.
Управляемый вентиль переменного тока содержит (фиг.З) вентиль 11 переменного тока, первый 12 и второй 13 элементы И и пороговый элемент 14.
Оптимальный регулятор (фиг.1) работает следующим образом.
Из объекта регулирования на вход обратной связи регулятора поступает вектор состояния (вектор регулируемых величин) х, а на вход объекта регулирования с выхода регулятора - вектор управляющих воздействий U. Кроме того, на задающий вход регулятора подается вектор уставок х°. Компоненты Хт и Хт° векторов х и х° формируются в объекте регулирования в виде напряжений, изображающих т-е состояние объекта в данный момент и m-ю уставку.
Напряжения хт и хт°. пропорциональные регулируемым величинам и уставкам, подаются на m-й сумматор в блоке 7 сумматоров, В результате на выходе этого сумматора образуется величина
Ч Ьт(хт - Хт°),
где Ьт - известный коэффициент.
На выходе блока 7 сумматоров в целом образуется вектор
(х-х°).
(1)
где х,х°, Ч - векторы с компонентами хт, хт°, Ч соответственно;
В - диагональная матрица элементов
bm.
Вектор W подается на вход 2 интеграторов, который вырабатывает вектор напряжений, пропорциональных интегралу от Ч1. Эти напряжения подаются на управляющий вход блок 5 модуляторов, который вырабатывает переменные токи с действующим значением I, пропорциональным напряжениям на управляющем входе. Таким образом, на входе блока 1 появляется вектор переменных токов с действующим значением
l /Wdt,(2)
to
которому соответствует вектор U переменных напряжений.
Блок 1 работает следующим образом.
Обозначим через I, d векторы действующих значений синусоидальных токов через резисторы 10 и управляемые вентили 8 переменного тока (фиг.2) соответственно. Кроме того, обозначим через г диагональную матрицу с элементами гп, равными сопротивлениям резисторов 10, а через Н матрицу коэффициентов трансформации трансформаторов 9.
Матрица трансформаторов 9 описывается уравнениями:
U Н U ; I + Н{1 + d) О,
(3)
(4)
30
где Т - знак транспонирования.
Вектор 1 определяется соотношением
г 1 UL .
(5)
Управляемые вентили 8 переменного тока (фиг.З) блока 1 функционируют следующим образом.
Вырабатываемые генератором 4 прямоугольные импульсы поступают на парафазный вход этого вентиля. Если при
этом на выходе порогового элемента 14
присутствует положительный потенциал, то
на выходах элементов И 12 и 13 появляются импульсы, повторяющие импульсы на
его парафазном входе.
Импульсы, на выходах элементов И 12 и 13 поступают на парафазный управляющий вход вентиля 11 переменного тока, При наличии таких импульсов вентиль 11 переменного тока ведет себя относительно действующих (положительных и отрицательных) значений напряжений Um тока dm между своими входом и выходом так же, как диоды в цепи постоянного тока.
При нулевом потенциале на выходе порогового элемента 14 на выходах элементов И 12 и 13 также появляются нулевые потенциалы, которые закрывают вентиль 11 переменного тока.
Таким образом, управляемые вентили 8 переменного тока при положительном потенциале невыходе порогового элемента 14 ведут себя как вентиль 11 переменного тока, а при отрицательном потенциале на выходе порогового элемента 14 представляют собой разомкнутую цепь.
На входы пороговых элементов 14, входящих в состав управляемых вентилей переменного тока 8-т, подаются потенциалы Хт. Пороговый элемент 14 вырабатывает на своем выходе потенциал
ет 0 при хт 0; ет 0 при хт 0.
Отсюда следует, что управляемый вентиль переменного тока 8-т при ет 0 ведет себя как вентиль 11 переменного тока, а при ет 0 представляет собой разомкнутую цепь.
Таким образом, управляемый вентиль переменного тока 8-т функционирует в соответствии со следующим соотношением:
если Хт О, TO Um неограничено и dm 0; если хт 0, то Um 5:0, dm 0, Umdm О,
т.е. представляет собой либо вентиль переменного тока (при хт 0), либо разомкнутую цепь (при хт 0).
Блок 5 модуляторов является источником синусоидальных токов I определенной величины, а на его выходе имеется выходное напряжение U. Таким образом, трансформаторы 9, вентили 8, резисторы 10 и блок 5 модуляторов описываются такими же уравнениями относительно действующих значений напряжений и токов, какими описываются матрица трансформаторов постоянного тока, диоды, резисторы и источники постоянного тока. В электрических цепях постояного тока, содержащих такие элементы, максимизируется разность между мощностью источников тока и половиной мощности тепловых потерь в резисторах при ограничениях, которыми являются соотношения между напряжениями в трансформаторах и положительность напряжений на диодах (соотношения между токами в трансформаторах и закон Ома для резисторов в ограничения не входят). В данном случае это означает, что в рассматриваемой электрической цепи напряжения U, U и токи I являются решением следующей задачи квадратичного программирования:
IU-| Urr 1 ,
U HTU ,
U 0 при х 0;
U неограничено при х О,
где Т - знак транспонирования.
Рассмотрим теперь задачу оптимального управления вида
} (х -х°)т В (х -х°) + UT G Щ dt min;
to
x HTU; (7)
x 0,
где х - вектор состояния объекта регулирования,
х° - вектор уставок,
х - производная по времени от вектора
состояния;
LL- вектор управлений,
Н - матрица, характеризующая объект регулирования,
B,G - матрицы весовых коэффициентов.
В соответствии с принципом максимума эта задача сводится к задаче вида (1), (2), (6), если обозначить , G
Следовательно, предлагаемое устройство решает задачу (7) оптимального управления с интегральным показателем качества. Эта задача отличается от решаемой в прототипе тем, что в прототипе ми- - нимизируется функционал, являющийся подынтегральным выражением в данной задаче.
Примером задачи управления, для решения которой может быть использован предлагаемый регулятор, является задача автоматического регулирования частоты и перетоков активной мощности в энергосистеме. Эта задача сводится к задаче, решаемой предлагаемым устройством, если принять, что
х - вектор измерений частоты, активной мощности перетоков по линиям электропередач и активной мощности электростанций;
x° - вектор уставок по частоте и активной мощности;
Н -матрица коэффициентов влияния генерируемых активных мощностей на частоту и измеряемые активные мощности;
UL - вектор управляющих воздействий, т.е. заданий на изменение генерируемой активной мощности электростанций
Формула изобретения 1. Оптимальный регулятор частоты и перетоков мощности энергосистемы, содержащий генератор синусоидального напряжения, подключенный выходом к управляющему входу блока модуляторов и входу генератора прямоугольных импульсов, выходы блока модуляторов и генератора пря- моуголь ных импульсов соединены соответственно с информационным и парафазным управляющим входами блока вычисления управляющих воздействий, включающего несколько групп резисторов и трансформаторов, первые выводы групп резисторов и первичных обмоток трансформаторов образуют выход блока вычисления управляющих воздействий, а их вторые выводы соединены с общей шиной, первые выводы вторичных обмоток первой группы трансформаторов образуют информационный вход блока вычисления управляющих воздействий, их вторые выводы через последовательно соединенные вторичные обмотки соответствующих трансформаторов остальных групп подключены к общей шине, выход блока вычисления управляющих воздействий через блок выпрямителей соединен с выходом оптимального регулятора, отличающийся тем, что, с целью повышения качества регулирования, в него введены блок сумматоров и блок интеграторов, а в блок вычисления управи
U
ляющих воздействий - группа управляемых вентилей переменного тока, управляющие и парафазные управляющие входы образуют соответственно управляющий
5 и парафазный управляющий входы блока вычисления управляющих воздействий, информационные входы соединены с первыми выводами вторичных обмоток первой группы трансформаторов, а выходы - с
10 общей шиной, вход обратной связи и управляющий вход блока вычисления управляющих воздействий подключены к первому входу блока сумматоров, второй вход которого является входом задания оптималь15 ного регулятора, а выход через блок интеграторов соединен с информационным входом блока модуляторов.
фиг.2
11
12
7k7i
)
a
U
t i
К
(Хт7
ЩигЗ
| Регулятор для оптимизации управления | 1984 |
|
SU1339492A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
