ятл
сл
14
введены также измерители 23 и 24 пото- косцепления статора и момента, векторные анализаторы 25 и 26, блок преобразования координат 27, сумматор 28, регуляторы 29-31 соответственно момента, компоненты потокосцепления и коммутирующего потокосдепления, формирователи 32 и 33 задания коммутирующего потокосдепления и управляющих напряжений. В системе автоматического регулирования вентильного электропривода образованы два контура регулирования.
Внешний контур регулирования содержит регулятор частоты вращения 17, входами связанный с датчиком 15 и задатчиком 16 частоты вран;ения, а выходом - с первым входом формирователя 32 и регулятором 29 момента. Внутренний многомерный KOHTVf) регулирования содержит регуляторы 29-31, работающие по принципу подчиненного регулирования. В результате обеспечиваются уменьшение пульсаций момента и частоты вращения. 3 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1984 |
|
SU1205246A1 |
| Устройство для испытания механической трансмиссии | 1988 |
|
SU1585704A1 |
| Электропривод | 1983 |
|
SU1167688A1 |
| Вентильный электропривод | 1983 |
|
SU1234940A1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
| Электропривод с векторным управлением | 1985 |
|
SU1292153A1 |
| Электропривод | 1987 |
|
SU1515324A1 |
| Устройство для частотного управления асинхронным двигателем | 1978 |
|
SU744887A1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
Изобретение относится к электротехнике и может быть использовано в нефтяной, горнорудной и металлургической отраслях промышленности. Целью изобретения является повышение точности регулирования Момента при сохранении быстродействия. С этой целью вентильный электропривод снабжен датчиками 18-20 напряжений фаз статора синхронного двигателя 1, преобразователями 21 и 22 числа фаз, связанными с датчиками 2-4 токов и датчиками 18- 20 /;оответственно. В электропривод
1
Изобретение относится к электротехнике, в частности к вентильным электроприводам с синхронными двигателями и зависимыми инверторами тока, и может быть использовано в ряде отраслей промышленности (нефтяной, горнорудной, металлургической и др.) для регулируемых по частоте вращения электроприводов мощных быстроходных механизмов с повышенными требованиями к точности поддержания заданных значений момента или скорости и быстродействию в переходных режимах.
Целью изобретения является повышение точности регулирования момента при сохранении быстродействий.
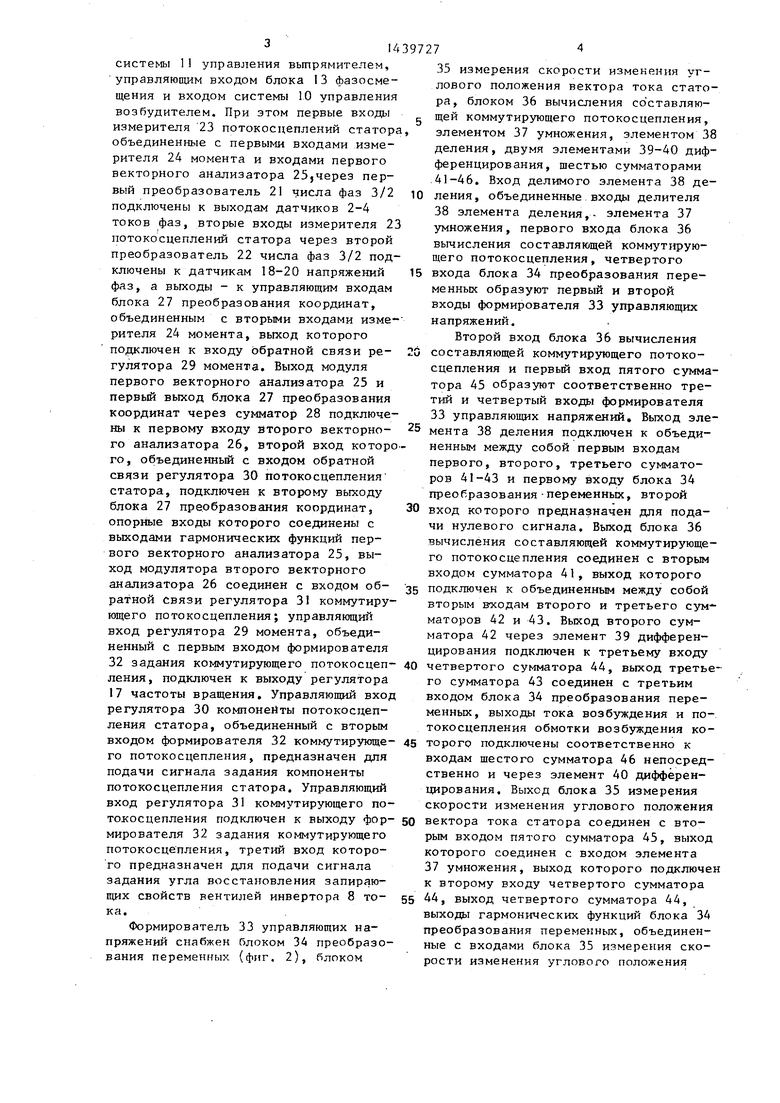
На фиг. 1 представлена функциональная схема вентильного электропривода; на фиг. 2 - функциональная схема формирователя управляющих напряжений; на фиг. 3 - векторная диаграмма синхронного двигателя.
Вентильный электропривод содержит синхронный двигатель 1 (фиг. I), ста- торные обмотки которого через датчики 2-4 токов фаз статора подключены к выходам преобразователя 5 частоты, выполненного с последовательно соединенными управляемым выпрямителем 6, сглаживающим реактором 7 и инвертором 8 тока, а обмотка возбуждения подключена к выходу регулируемого возбудителя 9 с системой 10 управления на входе.
Вентильный электропривод содержит систему П управления выпрямителем, систему 12 управления инвертором, блок 13 фазосмещения, датчик 14 угло
вого положения и датчик 15 частоты вращения, установленные на валу синхронного двигателя 1, последовательно соединенные задатчик 16 частоты вращения и регулятор 17 частоты вращения. При этом выход датчика 15 частоты вращения подключен к входу обратной связи регулятора 17 частоты вращения, а выход датчика 14 углового положения подключен к опорному входу блока 13 фазосмещения, соединенного выходом с входом системы 12 управления инвертором,
В вентильный электропривод введены
датчики 18-20 напряжений фаз статора, первый и второй преобразователи 21 и 22 числа фаз 3/2, измеритель 23 пото- косцеплений и измеритель 24 момента синхронного двигателя 1, первый и второй векторные анализаторы 25 и 26, блок 27 преобразования координат, сумматор 28, регулятор 29 момента, регулятор 30 компоненты потокосцепления статора и регулятор 31 коммутирующего потокосцепления, формирователь 32 задания коммутирующего потокосцепления и формирователь 33 управля- напряжений, первый, второй, третий и четвертый входы которого подключены соответственно к выходам регулятора 29 момента, регулятора 30 компоненты потокосцепления статора, регулятора 31 коммутирующего потокосцепления и датчика 15 частоты вращения.
5 Первый, второй и третий выходы формирователя 33 управляющих напряжений соединены соответственно с выходом
0
5
0
системы 11 управления выпрямителем, управляющим входом блока 13 фазосме щения и входом системы 10 управлени возбудителем. При этом первые входы измерителя 23 потокосцеплений статор объединенные с первыми входами измерителя 24 момента и входами первого векторного анализатора 25,через первый преобразователь 21 числа фаз 3/2 подключены к выходам датчиков 2-4 токов фаз, вторые входы измерителя 2 потокосцеплений статора через второй преобразователь 22 числа фаз 3/2 подключены к датчикам 18-20 напряжений фаз, а выходы - к управляющим входам блока 27 преобразования координат, объединенным с вторыми входами измерителя 24 момента, выход которого подключен к входу обратной связи регулятора 29 момента. Выход модуля первого векторного анализатора 25 и первьй выход блока 27 преобразования координат через сумматор 28 подключены к первому входу второго векторного анализатора 26, второй вход которго , объединенный с входом обратной свчзи регулятора 30 потокосцепления статора, подключен к второму выходу блока 27 преобразования координат, опорные входы которого соединены с выходами гармонических функций первого векторного анализатора 25, выход модулятора второго векторного анализатора 26 соединен с входом обратной связи регулятора 31 коммутирующего потокосцепления; управляющий вход регулятора 29 момента, объединенный с первым входом формирователя 32 задания коммутирующего потокосцепления, подключен к выходу регулятора 17 частоты вращения. Управляющий вхо регулятора 30 компонейты потокосцепления статора, объединенный с вторым входом формирователя 32 коммутирующе го потокосцепления, предназначен для подачи сигнала задания компоненты потокосцепления статора. Управляющий вход регулятора 31 коммутирующего потокосцепления подключен к выходу фор мирователя 32 задания коммутирующего потокосцепления, TpeTitii вход которого предназначен для подачи сигнала задания угла восстановления запирающих свойств вентилей инвертора 8 тока.
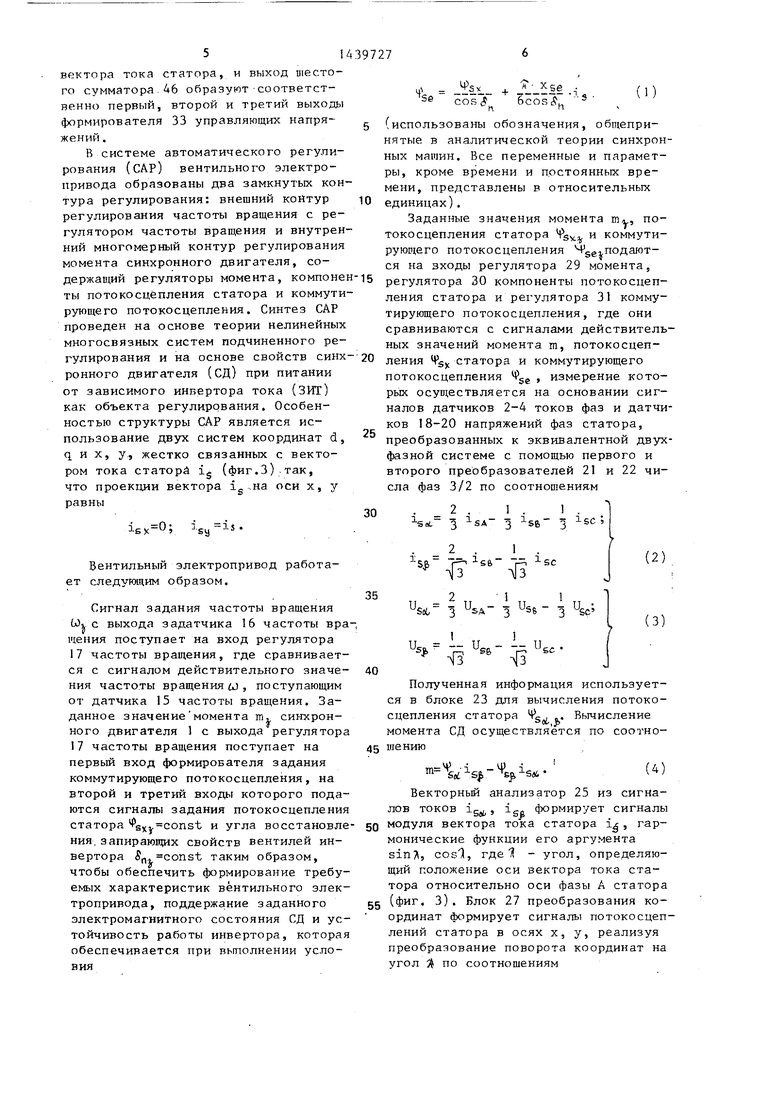
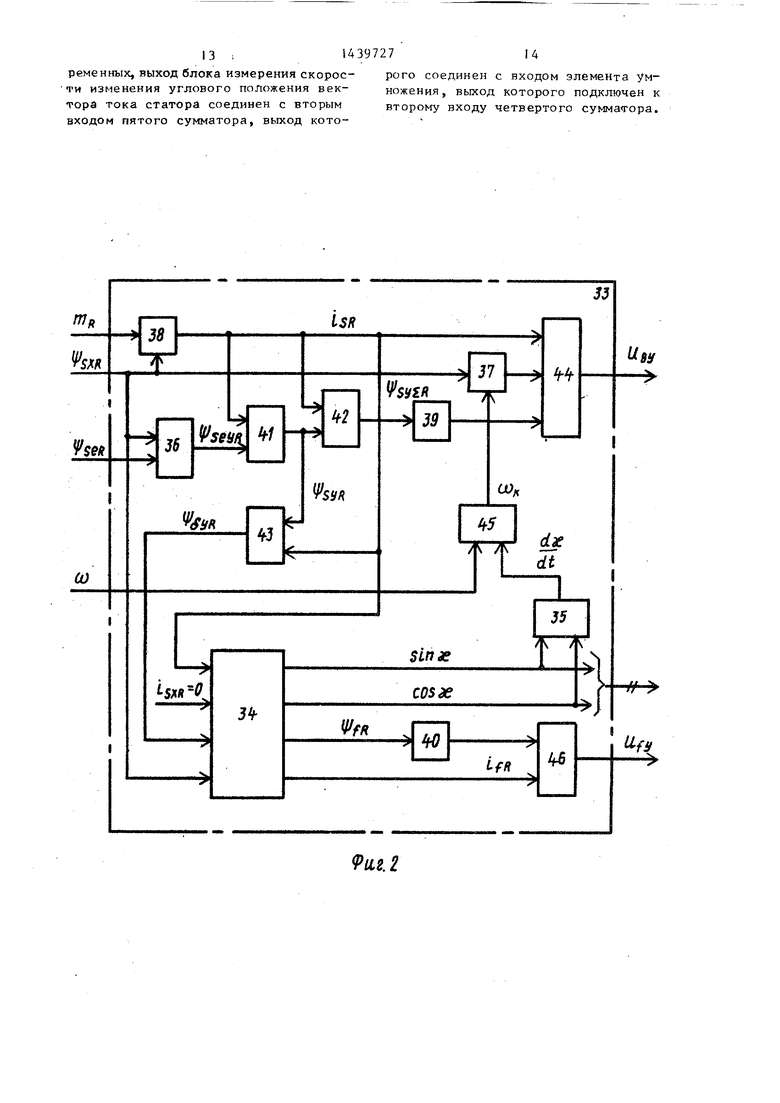
Формирователь 33 управляющих напряжений снабжен блоком 34 преобразования переменных (фиг, 2), блоком
10
5
5 0 вектора
0
35 измерения скорости изменения углового положения вектора тока статора, блоком 36 вычисления со ставляю- щей коммутирующего потокосцепления, элементом 37 умножения, элементом 38 деления, двумя элементами 39-40 дифференцирования, шестью сумматорами 41-46. Вход делимого элемента 38 деления, объединенные входы делителя 38 элемента деления,- элемента 37 умножения, первого входа блока 36 вычисления составляющей коммутирующего потокосцепления, четвертого 15 входа блока 34 преобразования переменных образуют первый и второй входы формирователя 33 управляющих напряжений.
Второй вход блока 36 вычисления 0 составляющей коммутирующего потокосцепления и первый вход пятого сумматора 45 образуют соответственно третий и четвертый входы формирователя 33 управляющих напряжений. Выход элемента 38 деления подключен к объединенным между собой первым входам первого, второго, третьего сумматоров и первому входу блока 34 преобразования-переменных, второй вход которого предназначен для подачи нулевого сигнала. Выход блока 36 вычисления составляющей коммутирующего потокосцепления соединен с вторым входом сумматора 41, выход которого подключен к объединенным между собой вторым нходам второго и третьего сум- маторов 42 и 43. Выход второго сумматора 42 через элемент 39 дифференцирования подключен к третьему входу четвертого сумматора 44, выход третьего сумматора 43 соединен с третьим входом блока 34 преобразования переменных, выходы тока возбуждения и потокосцепления обмотки возбуждения которого подключены соответственно к входам шестого сумматора 46 непосредственно и через элемент 40 дифференцирования. Выход блока 35 измерения скорости изменения углового положения
тока статора соединен с вторым входом пятого сумматора 45, выход которого соединен с входом элемента 37 умножения, выход которого подключен к второму входу четвертого сумматора 5 44, выход четвертого сумматора 44, выходы гармонических функций блока 34 преобразования переменных, объединенные с входами блока 35 измерения скорости изменения углового положения
5
0
514
вектора тока статора, и выход тесто- го сумматора 46 образуют-соответственно нервый, второй и третий выхода формирователя 33 управляющих напряжений .
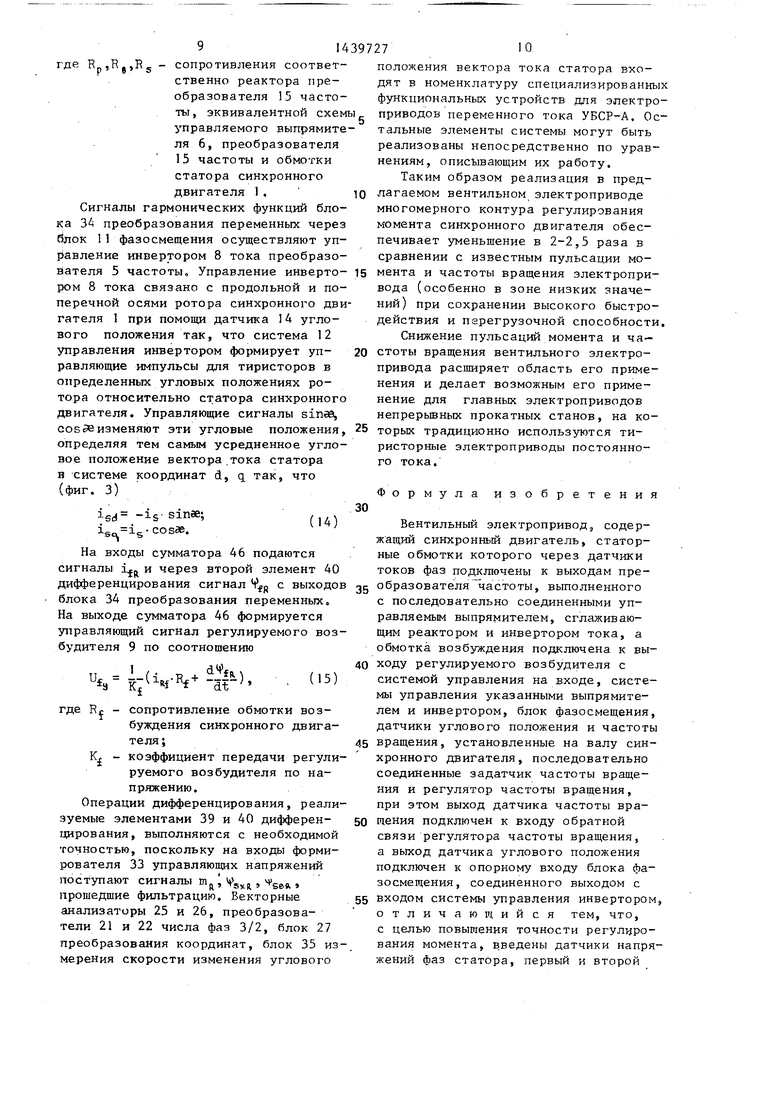
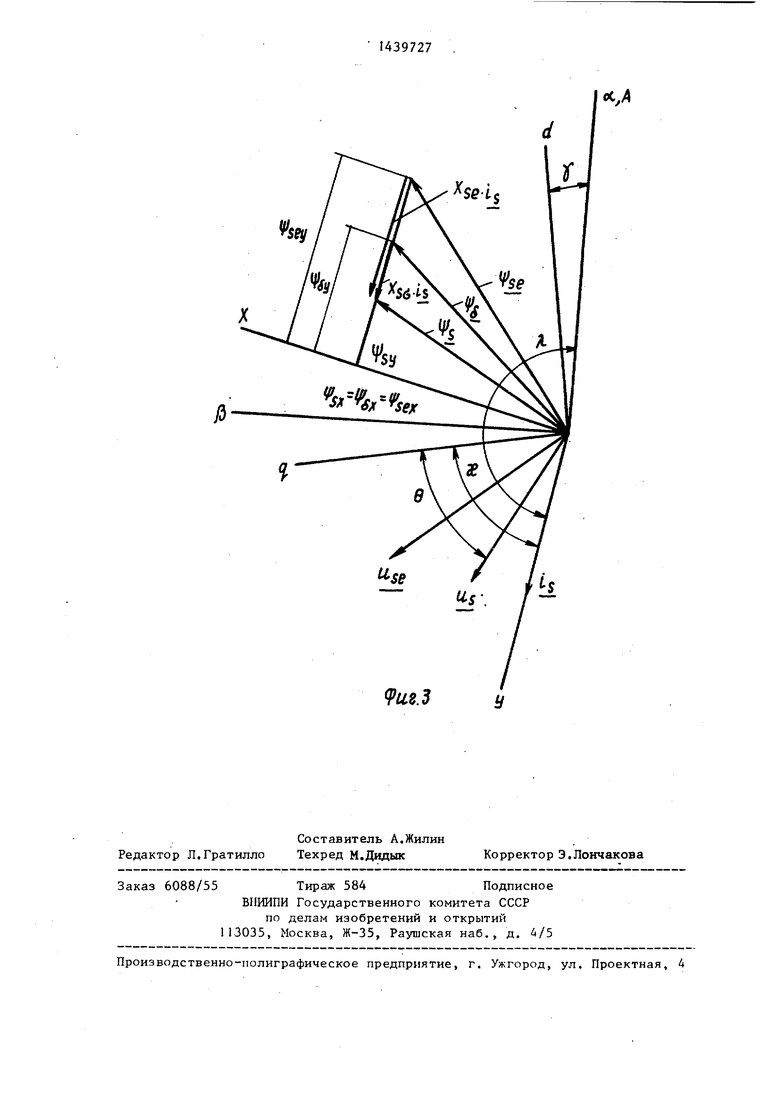
В системе автоматического регулирования (САР) вентильного электропривода образованы два замкнутых контура регулирования: внешний контур регулирования частоты вращения с регулятором частоты вращения и внутренний многомерный контур регулирования момента синхронного двигателя, содержащий регуляторы момента, компонен ты потокосцепления статора и коммутирующего потокосцепления. Синтез САР проведен на основе теории нелинейных многосвязных систем подчиненного регулирования и на основе свойств синхронного двигателя (СД) при питании от зависимого инвертора тока (ЗИТ) как объекта регулирования. Особенностью структуры САР является использование двух систем координат d, q и X, у, жестко связанных с вектором тока статорй ig (фиг.З).так, что проекции вектора ig на оси х, у равны
sx
0;
Вентильный электропривод работает следующим образом.
Сигнал задания частоты вращения Wv с выхода задатчика 16 частоты вращения поступает на вход регулятора 17 частоты вращения, где сравнивается с сигналом действительного значения частоты вращениям, поступающим от датчика 15 частоты вращения. Заданное значение момента т, синхронного двигателя 1 с выхода регулятора 17 частоты вращения поступает на первый вход формирователя задания коммутирующего потокосцепления, на второй и третий входы которого подаются сигналы задания потокосцепления статора Ч д -const и угла восстановления, запирающих свойств вентилей инвертора Jni const таким образом, чтобы обеспечить формирование требуемых характеристик вентильного электропривода, поддержание заданного электромагнитного состояния СД и устойчивость работы инвертора, которая обеспечивается при выполнении условия
39727
f 11 + ..
cos S бсОБс., h
(использованы обозначения, общепринятые в аналитической теории синхронных машин. Все переменные и параметры, кроме времени и постоянных времени, представлены в относительных
единицах).
Заданные значения момента т, потокосцепления статора Vs и коммутирующего потокосцепления ,подаются на входы регулятора 29 момента,
регулятора 30 компоненты потокосцепления статора и регулятора 31 коммутирующего потокосцепления, где они Сравниваются с сигналами действительных значений момента га, потокосцепления Чзу, статора и коммутирующего потокосцепления Фд , измерение которых осуществляется на основании сигналов датчиков 2-4 токов фаз и датчиков 18-20 напряжений фаз статора, преобразованных к эквивалентной двухфазной системе с помощью первого и второго преобразователей 21 и 22 числа фаз 3/2 по соотношениям
Ч
ЗА
S6
isc;
Т г
3
SC
(2)
2 } 1
s 3 А 3 3 sc
Us i- U-. - 1- Ug. .
Чз Чз
:з)
Полученная информация используется в блоке 23 для вычисления потокосцепления статора 4g . Вычисление омента СД осуществляется по соотно- ению
()
Векторньй анализатор 25 из сигналов токов ig, igo формирует сигналы
модуля вектора тока статора ix, гармонические функции его аргумента sin, cosl, где - угол, определяющий положение оси вектора тока статора относительно оси фазы А статора
(фиг. 3). Блок 27 преобразования координат формирует сигналы потокосцеплений статора в осях х, у, реализуя преобразование поворота координат на угол у по соотношениям
fsx Ф соБЙ+ Ч sin5l; sy -4L.,sin7l+,cos.
(5)
sp
Ha выходе сумматора 28 формируется сигнал ° соотношению (фиг.З)
se..is.(6)
Векторный анализатор 26 из сигналов потокосцеплений s6a формиру- Ю ет сигнал модуля вектора коммутирующего потокосцепления Vse Регулятор 29 момента, регулятор 30 компоненты потокосцепления статора, регулятор 31 коммутирующего потскосцепления имеют передаточные функции
1
Н вех - К.
2 «ХД
(9)
gСумматоры 41-43 формируют соответственно сигналы .u по соотношениям {фиг. 3) еул set)i-x
S42R
4,
se sft
syR +xJ.1 ед ;
(10)
Vfllft %mi Sfe so. J E f X8
15
W(p)
2т и5П+т рТ
(7)
где Xp,x. - соответственно параметры сглаживающего реактора 7, преобразователя 5 частоты и эквивалентной схемы управляемого выпрямителя 6 преобразователя 5 частоты. Блок 34 преобразования переменных осуществляет переход от токов , 0, где Т. - постоянная времени, выбирав 20 i и потокосцепленийЦ Ф5, Ц син- мая в соответствии с требова- хронного двигателя в осях х, у к то- ниями к вентильному электро кам ig , ig , i, и потокосцеплениям приводу и определяющая быст i 1 с учетом вих- родействие системы автомати ревых токов и насьщения синхранного ческого регулирования.25 двигателя 1. Выходы гармонических
Регуляторы момента, компоненты по- функций блока 34 преобразования пере- токосцепления статора и коммутирующего менных подаются на вход блока 35 из- потокосцепления обеспечивают равенство мерения скорости изменения углового момента, компоненты потокосцепленияположения вектора тока статора, на
статора и коммутирующего потокосцепле-30 выходе которого формируется сигнал ния их заданным значениям в установив- dcB шихся режимах работы электропривода.
Выходные сигналы регулятора 29 момента Шп, регулятора 30 компоненты потокосцепления статора регулятора ,35 коммутирующего потокосцепления seft .датчика 15 частоты вращения подаются соответственно на первый, второй, третий и четвертый входы формирователя
-- в соответствии, например, с соотС1ъ
ношением
dae d . . d
-- ccs ae -- sin B-sin --cosse.
dt dt dt
(11)
Ha входы сумматора 45 подаются сигналы частоты вращения (J синхронно.33 управляюш 1х напряжений, на первом, 40 го двигателя 1 от датчика 15 и ско- втором и третьем выходах которого рости измерения углового положения
формируются управляющие сигналы управляемого выпрямителя 6 преобразователя 5 частоты Ugy , инвертора 8 тока преобразователя 5 частоты sinae, cosafc, где ее - угол, определяющий положение оси вектора тока статора относительно поперечной оси ротора (фиг. 3), регулируемого возбудителя
На выходе элемента 31 деления фор мируется сигнал igj по соотношению
г п R si Г
(8)
SVHgc
(.-. -JJ
Ha выходе блока 36 вычисления сое- тавляющей коммутирующего потокосцепления формируется сигнал t seyn по соотношению (фиг. 3)
Н вех - К.
2 «ХД
(9)
gСумматоры 41-43 формируют соответственно сигналы .u по соотношениям {фиг. 3) еул set)i-x
S42R
4,
se sft
syR +xJ.1 ед ;
Vfllft %mi Sfe so. J EЮ
15
20 25
(7)
равбоватроыстати выходе которого формируется сигнал dcB
-- в соответствии, например, с соотС1ъ
ношением
dae d . . d
-- ccs ae -- sin B-sin --cosse.
dt dt dt
(11)
Ha входы сумматора 45 подаются сигналы частоты вращения (J синхронноdse
вектора тока статора -- от блока
dt
35, На выходе сумматора 45 формирует- ся сигнал CJ частоты вращения системы координат х, у
dae , dt
(12)
50
gc
На выходе сумматора 44 с помощью элемента 37 умножения, элемента 39 дифференцирования формируется управляющий сигнал Ilg управляемого выпрямителя 6 преобразователя 5 частоты по соотношению
B, R-(4..).(13)
,.Rj.Rp+R,
где R
R..s
сопротивления соответственно реактора преобразователя 15 частоты, эквивалентной схемы управляемого выпрямителя 6, преобразователя 15 частоты и обмотки статора синхронного двигателя 1.
Сигналы гармонических функций блока преобразования переменных через блок 11 фазосмещения осуществляют уп- р1авление инвертором 8 тока преобразоположения вектора тока статора входят в номенклатуру специализированны функциональных устройств дпя электро приводов переменного тока УБСР-А. О тальные элементы системы могут быть реализованы непосредственно по уравнениям, описывающим их работу.
10
Таким образом реализация в предлагаемом вентильном электроприводе многомерного контура регулирования момента синхронного двигателя обеспечивает уменьшение в 2-2,5 раза в сравнении с известным пульсации мо- йателя 5 частоты. Управление инверто- 15 мента и частоты вращения электропри ром 8 тока связано с продольной и по- вода (особенно в зоне низких значе- перечной осями ротора синхронного двигателя 1 при ПОМОПЩ датчика 14 углового положения так, что система 12 управления инвертором формирует уп- 20 равляющие импульсы для тиристоров в определенных угловых положениях ротора относительно статора синхронного
ний) при сохранении высокого быстродействия и перегрузочной способност
Снижение пульсаций момента и частоты вращения вентильного электропривода расширяет область его применения и делает возможным его применение для главных электроприводов непрерьшных прокатных станов, на которых традиционно используются ти- ристорные электроприводы постоянного тока.
двигателя. Управляющие сигналы sin COSзеизменяют эти угловые положения, определяя тем самым усредненное угловое положение вектора.тока статора в системе координат d, q так, что (фиг. 3)
ied -is- ig 15- cosae.
(14)
Вентильный электропривод, содержащий синхронный двигатель, статор- ные обмотки которого через датчики токов фаз подключены к выходам преНа входы сумматора 46 подаются сигналы ij« и через второй элемент 40 дифференцирования сигнал с выходов -jg образователя частоты, выполненного блока 34 преобразования переменных. На выходе сумматора 46 формируется Заправляющий сигнал регулируемого возбудителя 9 по соотношению
с последовательно соединенными управляемым выпрямителем, сглаживающим реактором и инвертором тока, а обмотка возбуждения подключена к вы
П - (i R + Ч
(15)
где Rr - сопротивление обмотки возбуждения синхронного двигателя;
К, - коэффициент передачи регулируемого возбудителя по напряжению.
Операции дифференцирования, реализуемые элементами 39 и 40 дифференцирования, выполняются с необходимой точностью, поскольку на входы формирователя 33 управляющих напряжений поступают сигналы т„ j Vgyj , .t t прошедшие фильтрацию. Векторные анализаторы 25 и 26, преобразователи 21 и 22 числа фаз 3/2, блок 27 преобразования координат, блок 35 измерения скорости изменения углового
положения вектора тока статора входят в номенклатуру специализированных функциональных устройств дпя электроприводов переменного тока УБСР-А. Остальные элементы системы могут быть реализованы непосредственно по уравнениям, описывающим их работу.
Таким образом реализация в предлагаемом вентильном электроприводе многомерного контура регулирования момента синхронного двигателя обеспечивает уменьшение в 2-2,5 раза в сравнении с известным пульсации мо- мента и частоты вращения электропри вода (особенно в зоне низких значе-
ний) при сохранении высокого быстродействия и перегрузочной способности.
Снижение пульсаций момента и частоты вращения вентильного электропривода расширяет область его применения и делает возможным его применение для главных электроприводов непрерьшных прокатных станов, на которых традиционно используются ти- ристорные электроприводы постоянного тока.
Формула изобретения
Вентильный электропривод, содержащий синхронный двигатель, статор- ные обмотки которого через датчики токов фаз подключены к выходам преобразователя частоты, выполненного
образователя частоты, выполненного
с последовательно соединенными управляемым выпрямителем, сглаживающим реактором и инвертором тока, а обмотка возбуждения подключена к выходу регулируемого возбудителя с
системой управления на входе, системы управления указанными выпрямителем и инвертором, блок фазосмещения, датчики углового положения и частоты
вращения, установленные на валу синхронного двигателя, последовательно соединенные задатчик частоты вращения и регулятор частоты вращения, при этом выход датчика частоты вращения подключен к входу обратной связи регулятора частоты вращения, а выход датчика углового положения подключен к опорному входу блока фазосмещения, соединенного выходом с
входом системы управления инвертором, отличающийся тем, что, с целью повышения точности регулирования момента, введены датчики напряжений фаз статора, первый и второй
преобразователи числа фаз, измерители потокосцепления статора и момента синхронного двигателя, первый и второй векторные анализаторы, блок преобразования координат, сумматор, регулятор момента, регулятор компонеты потокосцепления статора и регулятор коммутирующего потокосцепления синхронного двигателя, формирователь задания коммутирующего потокосцепления и формирователь управляющих напряжений, первый, второй, третий и четвертый входы которого подключены соответственно к выходам регулятора момента, регулятора компоненты потокосцепления статора, регулятора коммутирующего потокосцепления и датчик частоты вращения, а первый, второй и третий выходы соединены соответственно с входом системы управления выпрямителем, управляющим входом блока фазосмещения и входом системы управления возбудителем, при этом первьй вход измерителя потокосцепления статора, объединенный с первым входом измерителя момента и входом первого векторного анализатора через первьй преобразователь числа фаз подключен к выходам датчиков токов фаз, второй вход измерителя потокосцеплений статора через второй преобразователь числа фаз подключен к выходам датчиков напряжений фаз, а выход - к управляющему входу блока преобразования 35 матора, выходом гармонических функций координат, объединенному с вторым вхо- блока преобразования переменных, дом измерителя момента, выход которого подключен к входу обратной связи регулятора момента, выход модуля пер40
во го векторного анализатора и первый выход блока преобразования координат через сумматор подключены к первому входу второго векторного анализатора, второй вход которого, объединенный с входом обратной связи регулятора компоненты потокосцепления статора, подключен к второму выходу блока преобразования координат, опорный;вход которого соединен с выходом гармониобъединенным с входом блока измерения скорости изменения углового положения вектора тока статора, и выходом шестого сумматора, выход элемента деления подключен к объединенным между собой первым входам первого-четверто- го сумматоров и блока преобразования переменных, выход тока возбуждения ко- 45 торого непосредственно, а выход потокосцепления обмотки возбуждения через второй элемент дифференцирования подключены к входам шестого сумматора, выход блока вычисления составля- ческих функций первого векторного ана-50 ющей коммутирующего потокосцепления лизатора, выход модуля второго век- соединен с вторым входом первого сумматора, выход которого подключен к объединенным межда собой вторым входам второго и третьего сумматоров, выход 55 второго сумматора через первый эле- . мент дифференцирования подключён к третьему входу четвертого сумматора, выход третьего сумматора соединен с третьим входом блока преобразования петорного анализатора соединен с входом обратной связи регулятора коммутирующего потокосцепления, управляющий вход регулятора момента, объединенный с первым входом формирователя задания коммутирующего потокосцепления, подключен к выходу регулятора частоты вращения, управляющий вход
регулятора компоненты потокосцепления статора об единен с вторым входом формирователя задания коммутирующего потокосцепления, управляющий вход регулятора коммутирующего потокосцепления подключен к выходу формирователя задания коммутирующего потокосцепления, причем формирователь управляющих напряжений снабжен блоком преоб-- разования переменных, блоком измерения скорости изменения уг лового положения вектора тока статора, блоком вычисления составляющей коммутирующего потокосцепления, первым и вторым элементами дифференцирования и гаестью сумматорами, первый и второй входы формирователя управляющих напряжений образованы соответственно входом делимого элемента деления и объединенными между собой входом делителя элемента деления, входом элемента умножения, первым входом блока вычисления составляющей коммутирующего потокосцепления и четвертым входом блока преобразования переменньк, третий и чет- вертьй входы формирователя управляющих напряжений образованы вторым входом блока вычисления составляющей
коммутирующего потокосцепления и первым входом пятого сумматора, а первый - третий выходы формирователя управляющих напряжений образованы соответственно выходом четвертого сум35 матора, выходом гармонических функций блока преобразования переменных,
40
объединенным с входом блока измерения скорости изменения углового положения вектора тока статора, и выходом шестого сумматора, выход элемента деления подключен к объединенным между собой первым входам первого-четверто- го сумматоров и блока преобразования переменных, выход тока возбуждения ко- 45 торого непосредственно, а выход потокосцепления обмотки возбуждения через второй элемент дифференцирования подключены к входам шестого сумматоременных, выход блока измерения скорости изменения углового положения вектора тока статора соединен с вторым входом пятого сумматора, выход которого соединен с входом элемента умножения, выход которого подключен к второму входу четвертого сумматора.
ие.2
9ие.З
| Патент США № 4230979, кл | |||
| РЕГУЛЯТОР ДАВЛЕНИЯВСЕСОЮЗНАЯ|пяШ1Ш^-Т:-'^-"-/-^.^--^f'^'^lO '^f^-^'^ • | 0 |
|
SU318721A1 |
| Вентильный электропривод | 1984 |
|
SU1205246A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
