Изобретение относится к области эксплуатации асинхронных электродвигателей и может быть использовано для определения величины нагрузки электродвигателя, что позволяет в процессе функционирования электродвигателя посредством оперативного инструментального контроля величины фактической нагрузки определить соответствие мощности электродвигателя приводимым в действие машине, механизму или устройству, обеспечить его функционирование в пределах рабочей зоны технических характеристик, предотвратить аварийный останов асинхронного электродвигателя из-за перегрузки в случае организации соответствующего контроля нагрузки и защиты.
Известны различные способы, которыми определяют величину нагрузки электродвигателя от измерения величины момента непосредственно на валу электродвигателя до его вычисления по измеренным величинам тока, активных и реактивных сопротивлений статора и ротора электродвигателя [1].
Однако, определение момента, развиваемого электродвигателем, этими способами достаточно сложно и трудоемко.
Существуют способы определения частоты вращения ротора асинхронного электродвигателя посредством установки на электродвигатель фотоэлектрических или электромагнитных датчиков, которые генерируют импульсы с частотой вращения ротора.
Частоту (величину) скольжения ротора асинхронного электродвигателя в этом случае определяют по разности частоты сети питания электродвигателя и частоты вращения ротора асинхронного электродвигателя [2].
В качестве ближайшего аналога принят способ оценки величины скольжения ротора асинхронного электродвигателя по графику зависимости скольжения от величины потребляемого электродвигателем тока при неизменном напряжении питания [3].
При этом посредством трансформаторов (датчиков) тока и напряжения, соответствующих электронных преобразователей и приборов визуального наблюдения или устройств регистрации одновременно получают интегральные значения напряжения и потребляемого асинхронным электродвигателем тока, а затем по паспортным данным (упомянутый график), приближенно оценивают величину скольжения ротора асинхронного электродвигателя, то есть величину нагрузки [4].
Недостатком этого способа является опосредованная приближенная оценка величины скольжения ротора асинхронного электродвигателя.
Сущность способа и устройства для его осуществления заключается в следующем.
1. Известно, что в трехфазном асинхронном электродвигателе обмотки статора, за счет сдвига фаз между ними, возбуждают магнитное поле, вращающееся с частотой электрической сети fс (или кратной ей). Это поле индуктирует в короткозамкнутых стержнях ротора ток, который обуславливает вращение ротора. Частота вращения ротора асинхронного электродвигателя fвр в двигательном режиме несколько меньше частоты вращения магнитного поля статора. Разность частот fс-fвр является частотой скольжения ротора относительно поля статора, а отношение (fс-fвр)/fс - величиной скольжения S, которую выражают в долях единицы или в процентах.
Одной из основных механических характеристик асинхронного электродвигателя является зависимость величины скольжения от величины момента на валу электродвигателя [1]. При значениях скольжения S<(0,35÷0,40)Sк эта зависимость, с достаточной степенью точности, может быть представлена прямой линией, описываемой уравнением
М~2Мк•S/Sк
или М=Мн•S/Sн,
где Мк, Sк - критический момент и соответствующее ему критическое скольжение;
Мн, Sн - номинальные момент и скольжение.
В проектных условиях эксплуатации асинхронный электродвигатель в двигательном режиме функционирует в рабочей зоне изменения момента М≤Мн и скольжения S≤Sн, где величина скольжения прямо пропорциональна величине момента, развиваемого электродвигателем. В диапазоне скольжения 1≥S≥Sн зависимость скольжения и момента будет нелинейной [1].
Изменение механического сопротивления приводимых в действие асинхронным электродвигателем машины, механизма или устройства вызывает изменение величины скольжения ротора электродвигателя и, вследствие этого, соответствующее изменение величины потребляемого электродвигателем тока, как отображение изменения величины нагрузки на электродвигатель.
Таким образом, величина скольжения ротора, функционирующего в зоне пропорционального изменения скольжения и момента на валу асинхронного электродвигателя, является первичным, представительным и достоверным показателем величины нагрузки на электродвигатель.
В предлагаемом способе и устройстве его осуществления (устройство регистрации и обработки сигнала) определение скольжения ротора асинхронного электродвигателя осуществляют путем бесконтактного измерения и регистрации мгновенной амплитуды (величины) потребляемого электродвигателем тока J(t) во времени посредством съемной калиброванной тороидальной индукционной катушки, которую устанавливают на одну из фаз кабеля питания электродвигателя, и устройства регистрации и обработки сигнала. Указанная калиброванная тороидальная индукционная катушка, в совокупности с измерительными приборами, является датчиком тока, так как выходное напряжение на ней пропорционально амплитуде мгновенной величины тока, протекающего по кабелю.
На регистрационных записях потребляемого тока J(t) частота скольжения ротора относительно поля статора асинхронного электродвигателя выражается в виде амплитудной модуляции тока с несущей частотой, равной частоте сети питания электродвигателя. Частота модуляции равна удвоенной частоте скольжения 2(fс-fвр), что обусловлено изменением величины индуктивности обмотки статора, в которой регистрируют ток, при движении относительно него короткозамкнутого ротора. При этом ротор, относительно вращающегося поля статора, движется с разностной частотой fс-fвр.
Таким образом, при вращении рамки ротора асинхронного электродвигателя в магнитном поле статора происходит амплитудная модуляция потребляемого тока по закону
J(t) = A0•(1+μ•|sin2πΔf•t|)•sin2πfc•t, (1)
где А0 - амплитуда потребляемого тока;
μ - коэффициент (глубина) амплитудной модуляции;
Δf=fс-fвр - частота скольжения;
fс - частота электрической сети;
fвр - частота вращения ротора;
t - время.
Спектр частот потребляемого тока в этом случае будет иметь две боковых спектральных линии fc-2Δf, fc, fc+2Δf. Амплитуда боковой частоты модуляции будет μ/2.
Техническим результатом представленного изобретения является непосредственное непрерывное или периодическое инструментальное определение фактических численных значений скольжения ротора, коэффициента модуляции амплитуды и величины потребляемого тока функционирующим асинхронным электродвигателем, приводящим в действие машину, механизм или устройство, что позволяет осуществить контроль за величиной нагрузки асинхронного электродвигателя, обеспечить его функционирование в пределах рабочей зоны технических характеристик и предотвратить его выход из строя.
Технический результат достигается тем, что в способе и устройстве для его осуществления определение скольжения ротора асинхронного электродвигателя, согласно представленному изобретению, осуществляют посредством калиброванной тороидальной индукционной катушки, установленной на одну из фаз кабеля питания электродвигателя, выходное напряжение на которой пропорционально мгновенной величине потребляемого электродвигателем тока, и устройства для регистрации и обработки сигнала путем непрерывной или периодической регистрации значений мгновенной величины потребляемого функционирующим асинхронным электродвигателем тока J(t) и соответствующей обработки этих записей.
В результате определяют мгновенную величину потребляемого асинхронным электродвигателем тока, коэффициент модуляции амплитуды тока и величину скольжения ротора, отображающие изменения величины нагрузки на электродвигатель во времени.
Способ и устройство для его осуществления позволяют по записям мгновенной величины потребляемого тока J(t) в течение нескольких секунд с высокой точностью определить абсолютную мгновенную амплитуду тока статора и величину скольжения ротора относительно вращающегося поля статора, отображающую величину нагрузки электродвигателя и режим его функционирования в момент проведения измерений.
Кроме того, устройство для осуществления способа определения скольжения ротора позволяет использовать его как защиту асинхронного электродвигателя по току.
Оперативное определение величины скольжения ротора позволяет контролировать изменение нагрузки на асинхронный электродвигатель во времени с высокой точностью, представительностью и достоверностью. Указанные выше частоты, коэффициенты и т.п. отнесены к трехфазному асинхронному электродвигателю с короткозамкнутым ротором, функционирующим от промышленной сети 50 Гц.
Однако предлагаемый способ и устройство для его осуществления предназначены для контроля величины нагрузки функционирующего асинхронного электродвигателя и другого исполнения: с короткозамкнутым ротором с повышенным скольжением, с повышенным моментом, а также с фазным ротором. При изменении числа фаз или количества полюсов статора электродвигателя следует учитывать соответствующее изменение частоты вращения и скольжения ротора относительно вращающегося поля статора. При этом необходимо изменять полосу фильтрации сигнала, которая относительно частоты вращения ротора определяется как 1/2fвр÷3/2fвр. Для трехфазного асинхронного электродвигателя с короткозамкнутым роторомполоса фильтрации выбрана, соответственно, 25÷75 Гц.
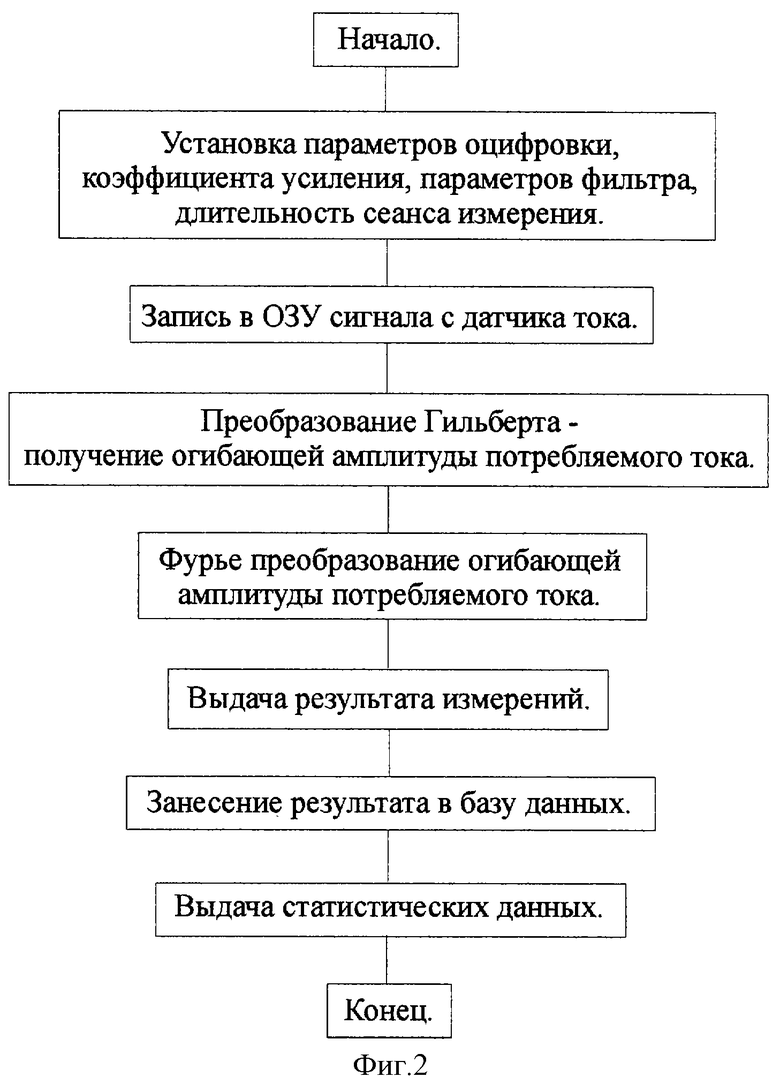
2. Устройство для осуществления способа определения скольжения ротора асинхронного электродвигателя включает калиброванную тороидальную индукционную катушку, программируемый усилитель, полосовой фильтр, настроенный на диапазон 25÷75 Гц, шестнадцатиразрядный АЦП, оперативное запоминающее устройство на 32 кбайта, цифровой индикатор, источник питания и микропроцессор (фиг. 1), снабженный специальной программой управления, регистрации и обработки сигнала, разработанной на основании упрощенного алгоритма для выделения низкочастотной огибающей амплитуды мгновенной величины потребляемого электродвигателем тока, позволяющей осуществить измерение и определение величин потребляемого тока, коэффициента амплитудной модуляции и скольжения.
В соответствии с блок-схемой устройства (фиг.2) сигнал калиброванной тороидальной индукционной катушки, установленной на одну из фаз кабеля питания электродвигателя, выходное напряжение на которой пропорционально мгновенной величине потребляемого асинхронным электродвигателем тока, поступает на программируемый усилитель, коэффициент усиления которого задается микропроцессором в зависимости от уровня сигнала. Усиленный сигнал поступает на полосовой фильтр с диапазоном фильтрации 25-75 Гц, где фильтруется, и далее - на 16-ти разрядный аналого-цифровой преобразователь (АЦП) для оцифровки. Цифровой сигнал с АЦП поступает в запоминающее устройство (ОЗУ) и далее посредством программ, заложенных в микропроцессор, осуществляется преобразование Гильберта по упрощенному алгоритму, представленному ниже. Определенные параметры амплитуды потребляемого тока, коэффициента модуляции и частоты скольжения асинхронного электродвигателя выводятся на цифровой индикатор или, при необходимости, по последовательному порту передаются в персональный компьютер, где заносятся в базу данных.
Упрощенный алгоритм выделения низкочастотной огибающей амплитуды потребляемого тока основан на том, что регистрируемый сигнал калиброванной тороидальной индукционной катушки, установленной на одну из фаз кабеля питания асинхронного электродвигателя, после полосовой фильтрации (полоса фильтра для трехфазного асинхронного электродвигателя с короткозамкнутым ротором, функционирующим от промышленной сети 50 Гц 25÷75 Гц), представляет практически гармонический сигнал с частотой, равной частоте питающей сети, что позволяет выполнить преобразование Гильберта для этого сигнала.
Для обработки полученных записей используют преобразование Гильберта, которое позволяет выделить низкочастотную огибающую амплитудно-модулированного сигнала потребляемого тока при достаточно малом коэффициенте модуляции [5].
Упрощенный алгоритм преобразования Гильберта на базе микропроцессора реализуют следующим образом:
- входной сигнал J(t) потребляемого электродвигателем тока с несущей частотой fс (1) оцифровывают, а затем сдвигают на фазу π/2
J(t)г = A0•(1+μ•|sin2πΔf•(t+π/4•f
- вычисляют сумму квадратов первичного и сдвинутого сигналов, что позволяет исключить из сигнала несущую частоту fс и сохранить в нем низкочастотную огибающую амплитудно-модулированного сигнала потребляемого тока;
- осуществляют цифровую низкочастотную фильтрацию полученного сигнала.
В результате получают низкочастотный сигнал амплитудной модуляции потребляемого тока с частотой, равной удвоенной частоте скольжения
J(t) = A0•(1+μ•|sin2πΔf•t|),
амплитуда которого изменяется от А0 до А0•(1+μ).
По полученной трассе огибающей амплитуды потребляемого тока определяют интегральную амплитуду тока А0, коэффициент амплитудной модуляции μ и частоту скольжения ротора асинхронного электродвигателя Δf.
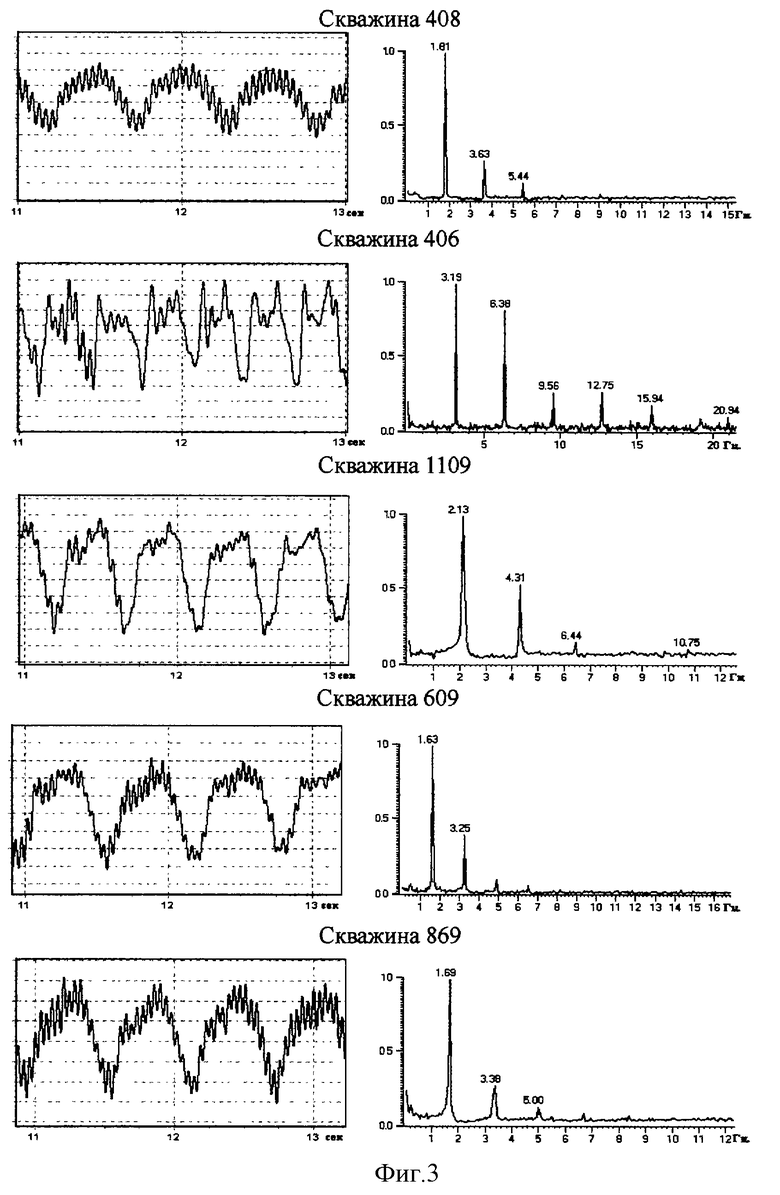
Алгоритм работы устройства для осуществления способа определения скольжения ротора при измерении величины потребляемого тока, определении коэффициента амплитудной модуляции и скольжения ротора функционирующего асинхронного электродвигателя представлен на фиг.2.
Устройство на базе микропроцессора, в зависимости от числа оборотов асинхронного электродвигателя, величины потребляемого тока и необходимой точности определения параметров, выбирает коэффициент усиления программируемого усилителя, частоту оцифровки АЦП, параметры полосового фильтра и длительность сеанса регистрации, осуществляет усиление, полосовую фильтрацию и оцифровку сигнала калиброванной тороидальной индукционной катушки и запись цифрового сигнала в запоминающее устройство. Далее осуществляет преобразование Гильберта по упрощенному алгоритму, в результате которого получает огибающую амплитуды потребляемого асинхронным электродвигателем тока, которая содержит удвоенную частоту скольжения ротора и ее гармоники. По величине оцифрованного сигнала тороидальной катушки, с учетом коэффициента калибровки, определяет абсолютную величину амплитуды потребляемого тока и коэффициент модуляции как отношение амплитуды огибающей к максимальной величине амплитуды тока. Далее, посредством преобразования Фурье определяет частоту колебаний огибающей амплитуды потребляемого тока, соответствующую удвоенной частоте скольжения ротора асинхронного электродвигателя. Для увеличения точности определения указанных параметров осуществляет многократное измерение параметров и определяет среднее значение.
Устройство позволяет в течение десятка секунд, в зависимости от применяемого микропроцессора, определять периодически (через заданный интервал времени) параметры функционирующего асинхронного электродвигателя: величину потребляемого тока, коэффициент амплитудной модуляции и скольжение ротора.
При использовании указанного устройства в стационарном режиме эксплуатации данные измерений по последовательному порту передают на персональный компьютер пульта контроля и управления функционирующего асинхронного электродвигателя.
Перечень графических иллюстраций применения предлагаемого способа и устройства для его осуществления.
Фиг. 1 - блок-схема устройства для осуществления способа определения величины скольжения ротора асинхронного электродвигателя на базе микропроцессора.
Фиг.2 - алгоритм работы устройства для осуществления способа определения скольжения ротора функционирующего асинхронного электродвигателя на базе микропроцессора.
Фиг. 3 - низкочастотные огибающие амплитуды потребляемого асинхронным электродвигателем тока одной из фаз статора ПЭД и их спектры Фурье.
Способ осуществляют следующим образом.
Нагрузку асинхронного электродвигателя, приводящего в действие машину, механизм или устройство, отображают величины потребляемого тока, коэффициента амплитудной модуляции и скольжения ротора. Указанные параметры функционирующего электродвигателя определяют по регистрационной записи мгновенной величины тока во времени.
Регистрацию и обработку сигнала мгновенной величины тока J(t) во времени, снимаемого в виде выходного напряжения калиброванной тороидальной индукционной катушки, устанавливаемой на одну из фаз кабеля питания электродвигателя, осуществляют посредством устройства для осуществления способа определения скольжения ротора асинхронного электродвигателя (фиг.1).
Посредством устройства для осуществления способа определения скольжения ротора асинхронного электродвигателя, разработанного на базе микропроцессора, снабженного программой управления, регистрации и обработки сигнала, основанной на упрощенном алгоритме выделения низкочастотной огибающей амплитуды мгновенной величины потребляемого электродвигателем тока, определение скольжения ротора асинхронного электродвигателя осуществляют следующим образом.
На одну из фаз кабеля питания функционирующего асинхронного электродвигателя устанавливают калиброванную тороидальную индукционную катушку, соединенную с электронным блоком устройства регистрации и обработки сигнала на базе микропроцессора, на цифровом индикаторе которого в течение десятка секунд визуализируются численные значения потребляемого тока, коэффициента амплитудной модуляции и частоты скольжения ротора.
Пример. 1 Способ определения величины скольжения ротора асинхронного электродвигателя изначально реализован на базе персонального компьютера и опробован при обследовании нефтяных скважин, оснащенных установками погружных насосов.
В скважине на глубине 1200÷1500 м установлен центробежный секционный насос с приводом от трехфазного погружного асинхронного электродвигателя (ПЭД) с короткозамкнутым ротором мощностью 22÷45 кВт.
Аналоговый сигнал мгновенных значений амплитуд потребляемого тока получен на устье скважины в виде выходного напряжения индукционной катушки, установленной на одну из фаз кабеля питания электродвигателя на вводе в трубную головку скважины.
Регистрационные записи мгновенных значений величины потребляемого электродвигателем тока во времени получены в условиях стационарного режима функционирования погружного электродвигателя насоса при постоянных физических параметрах пластовой жидкости в течение времени регистрации (десятки секунд). Эти записи содержат информацию о величине нагрузки на электродвигатель, которую отображают амплитуда потребляемого тока, коэффициент амплитудной модуляции и величина скольжения ротора асинхронного электродвигателя.
На фиг. 3 представлены низкочастотные огибающие амплитуды потребляемого тока, зарегистрированного на одной из фаз кабеля питания погружного электродвигателя, и их спектры Фурье для асинхронных электродвигателей в пяти скважинах. На спектрах приведены удвоенные частоты скольжения ротора ПЭД и их гармоники. Как видно, частота скольжения ротора существенно меньше номинальной и изменяется для ПЭД в скважинах от 0,8 до 1,6 Гц, соответственно, величина скольжения 1,6÷3,2% при номинальной для этого типа электродвигателей - 5÷6,5%. Коэффициент модуляции указанных ПЭД в скважинах изменяется в пределах 0,007÷0,016.
Регистрация изменения величины скольжения во времени показала, что при неизменных режиме работы ПЭД и физических параметрах пластовой жидкости погрешность определения величины скольжения составляет порядка ±0,02 Гц.
Пример. 2 Испытания устройства для осуществления способа определения скольжения ротора асинхронного электродвигателя, разработанного на базе микропроцессора, снабженного программой управления, регистрации и обработки сигнала, основанной на упрощенном алгоритме выделения низкочастотной огибающей амплитуды мгновенной величины потребляемого электродвигателем тока, позволили определить изменение величины скольжения ротора асинхронного электродвигателя при изменении его нагрузки.
Испытания указанного устройства выполняли следующим образом.
На одну из фаз питающего кабеля асинхронного электродвигателя, на валу которого было тормозное устройство, устанавливали калиброванную тороидальную катушку, соединенную с электронным блоком регистрации и обработки сигнала.
Подавали питание на электродвигатель, а затем посредством тормоза ступенчато повышали нагрузку.
На каждой ступени нагрузку поддерживали постоянной, в течение десяти секунд установившегося режима функционирования электродвигателя на цифровом индикаторе устройства визуализировались численные значения потребляемого тока, коэффициента амплитудной модуляции и частоты скольжения ротора.
Литература
1. М. Г. Чиликин и др. Основы автоматизированного электропривода. М.: Энергия, 1974.
2. Приборы и системы для измерения вибрации, шума и удара. Справочник. М.: Машиностроение, 1978, т.2. с.161-163.
3. Электротехнический справочник. М.: Энергоиздат, 1981, т.2.
4. С.А. Махмудов, М.С. Абузерли. Монтаж, обслуживание и ремонт скважинных электронасосов. Справочник. М.: Недра, 1995, с. 20-21.
5. С.А. Добрынин, М.С. Фельдман, Г.И. Фирсов. Методы автоматизированного исследования вибраций машин. Справочник. М.: Машиностроение, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИРОВАНИЯ ПОГРУЖНОГО ЭЛЕКТРИЧЕСКОГО ЦЕНТРОБЕЖНОГО НАСОСА | 2001 |
|
RU2206794C1 |
| СПОСОБ ПРИВЕДЕНИЯ К ЕДИНОМУ ВРЕМЕНИ РЕГИСТРАЦИИ РАЗНОВРЕМЕННЫХ ЗАПИСЕЙ ИЗМЕРЕНИЙ | 1998 |
|
RU2150684C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ОСНОВАНИЯ И ТЕЛА ПЛОТИНЫ ГЭС ПОД ВОЗДЕЙСТВИЕМ ИМПУЛЬСОВ, ВОЗНИКАЮЩИХ ПРИ ЗАПУСКЕ ГИДРОАГРЕГАТОВ | 1998 |
|
RU2151234C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ С ФАЗНЫМ РОТОРОМ | 2009 |
|
RU2390036C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2441249C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2397505C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ОБОБЩЁННОГО ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2641318C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФИЗИЧЕСКОГО СОСТОЯНИЯ ЗДАНИЙ И СООРУЖЕНИЙ | 1998 |
|
RU2140625C1 |
| СПОСОБ ДИАГНОСТИКИ ЭЛЕКТРИЧЕСКИХ ДВИГАТЕЛЕЙ С ФАЗНЫМ РОТОРОМ | 2008 |
|
RU2392632C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2624986C1 |
Изобретение относится к эксплуатации асинхронных электродвигателей и может быть использовано для определения величины его нагрузки посредством оперативного ее контроля. Технический результат заключается в обеспечении функционирования электродвигателя в пределах рабочей зоны технических характеристик. Определение скольжения ротора асинхронного электродвигателя осуществляют путем регистрации мгновенной величины потребляемого электродвигателем тока во времени на одной из фаз кабеля питания асинхронного электродвигателя и устройства регистрации и обработки сигнала на базе микропроцессора. Устройство содержит калиброванную тороидальную индукционную катушку, фильтр полосовой и микропроцессор, снабженный специальной программой управления, регистрации и обработки сигнала калиброванной тороидальной индукционной катушки, который задает коэффициент усиления программируемого усилителя, параметры полосового фильтра и длительность сеанса регистрации, оцифровывает сигнал и осуществляет преобразование Гильберта по упрощенному алгоритму. В результате определяют интегральную амплитуду тока, коэффициент амплитудной модуляции и частоту скольжения ротора асинхронного электродвигателя, которые достоверно отображают фактическую величину нагрузки на асинхронный электродвигатель во времени, что позволяет осуществить непрерывный или периодический оперативный контроль величины нагрузки асинхронного электродвигателя. 2 с.п. ф-лы, 3 ил.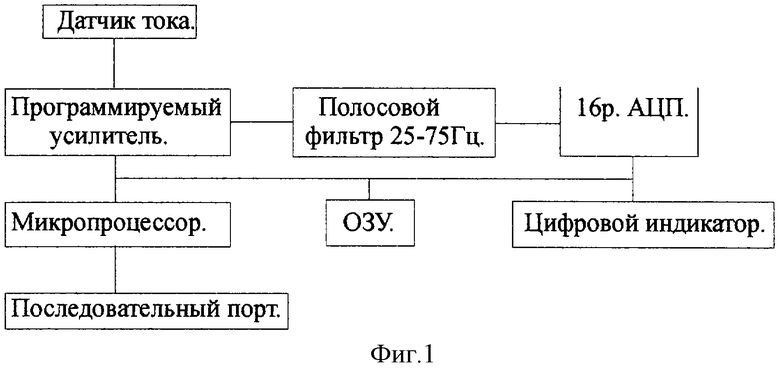
2. Устройство определения скольжения ротора асинхронного электродвигателя, содержащее калиброванную тороидальную индукционную катушку, установленную на одну из фаз кабеля питания асинхронного электродвигателя, отличающееся тем, что оно является портативным, снабжено микропроцессором с программой управления, регистрации и обработки сигнала калиброванной катушки, который после фильтрации низкой частоты обрабатывает сигнал по упрощенному алгоритму преобразования Гильберта для выделения низкочастотной огибающей амплитудно-модулированного гармонического сигнала потребляемого тока, с несущей частотой, равной частоте fс питающей сети и частотой модуляции, равной удвоенной частоте скольжения 2(fс-fвр), где fвр - частота вращения ротора асинхронного электродвигателя, для чего входной сигнал потребляемого асинхронным электродвигателем тока оцифровывают, а затем сдвигают на π/2, вычисляют сумму квадратов первичного и сдвинутого сигналов, что обеспечивает исключение из сигнала несущей частоты fс и сохранение в нем низкочастотной огибающей амплитудно-модулированного сигнала потребляемого тока с частотой, равной удвоенной частоте скольжения, из которого определяют амплитуду тока А0, коэффициент амплитудной модуляции μ и частоту скольжения Δf.е
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК АСИНХРОННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2143121C1 |
| Способ определения рабочих характе-РиСТиК лиНЕйНОгО АСиНХРОННОгО элЕКТРО-дВигАТЕля | 1979 |
|
SU845228A1 |
| Косвенный способ определения механических и пусковых характеристик асинхронного электродвигателя | 1987 |
|
SU1499290A1 |
| US 5915612 А, 29.06.1999 | |||
| ВЫПУСКНОЕ УСТРОЙСТВО ЗЕРНОВОГО БУНКЕРА | 1992 |
|
RU2065394C1 |
