5
(21)4202070/10
(86) PCT/FR 86/00211 (19.06.86)
(22).87 (31) 8509406 Ј.32) 20.06.85
(33) FR (46) 15.04.91. Бюл. № 14
(71)Сосьете Шимик де Шарбонаж С.А (FR)
(72)Жан-Люк Сише (FR)
(53)681.269(088.8)
(56) Авторское свидетельство СССР № 792081, ЕЛ G 01 G 11/14, 1979.
(54)УСТРОЙСТВО ДЛЯ ВЕСОВОЙ ДОЗИРОВКИ ГРАНУЛИРОВАННОГО ИЛИ ПОРОШКООБРАЗНОГО МАТЕРИАЛА
(57) Изобретение относится к устрой ствам непрерывной весовой дозировки гранулированного или порошкообразного материала и позволяет повысить / точность дозирования.Устройство содержит непрерывные раздельные ленты для экстракции и для дозировки, при этом взвешивают дозатор с лентой 14 и автоматически регулируют скорость ленты экстрактора 2 в зависимости от мгновенного результата измерения нагрузки материала, распределенного на ленте 14 дозатора посредством схемы электронной регулировки между блоком двигателя-редуктора 15 дозатора и блоком двигателя-редуктора 3 экстрактора. 4 ил
G
$
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ СИСТЕМА НЕПРЕРЫВНОГО ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 2008 |
|
RU2373500C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2005 |
|
RU2294237C2 |
| Многопозиционный регулятор уровня | 1980 |
|
SU930286A1 |
| Весовой дозатор непрерывного действия | 1990 |
|
SU1742630A2 |
| ДОЗАТОР ВЕСОВОЙ НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2003 |
|
RU2260775C2 |
| Ленточный дозатор сыпучих материалов | 1974 |
|
SU670817A1 |
| Устройство управления весовым дозатором непрерывного действия | 1982 |
|
SU1016685A1 |
| Весовой дозатор непрерывного действия | 1979 |
|
SU792082A1 |
| Способ автоматического управления процессом экстракции с предварительной пропиткой экстрагируемого материала растворителем в аппаратах многократного орошения | 1987 |
|
SU1449572A1 |
| ПРОМЫШЛЕННАЯ УСТАНОВКА ДЛЯ ГОРЯЧЕГО РЕЦИКЛИНГА АСФАЛЬТОВЫХ СМЕСЕЙ | 2012 |
|
RU2591218C2 |

Т Г и
6 3
4в „./ /J-19 ЮВ
UU(QQUQQD y I.
г WA9А
11А
7////7////////////Ss//////f/s//y////i /s//sssss/fs//j//////A
18
т п з
Фиг.1
6 3
сь
toco
оэ
ss/fs//j//////A
Ц 98
18
ы
Изобретение касается усовершенст- вешанного устройства позволяющего обеспечить с большой точностью поточ- ную и непрерывную весовую дозировку или смешивание нескольких гранулиро- ванных или порошкообразных материа- лов, таких как хлористый калий, пе- сок, цемент, фосфат, грануляты и
Т.Д.
Цель изобретения - повышение точ- ности дозирования.
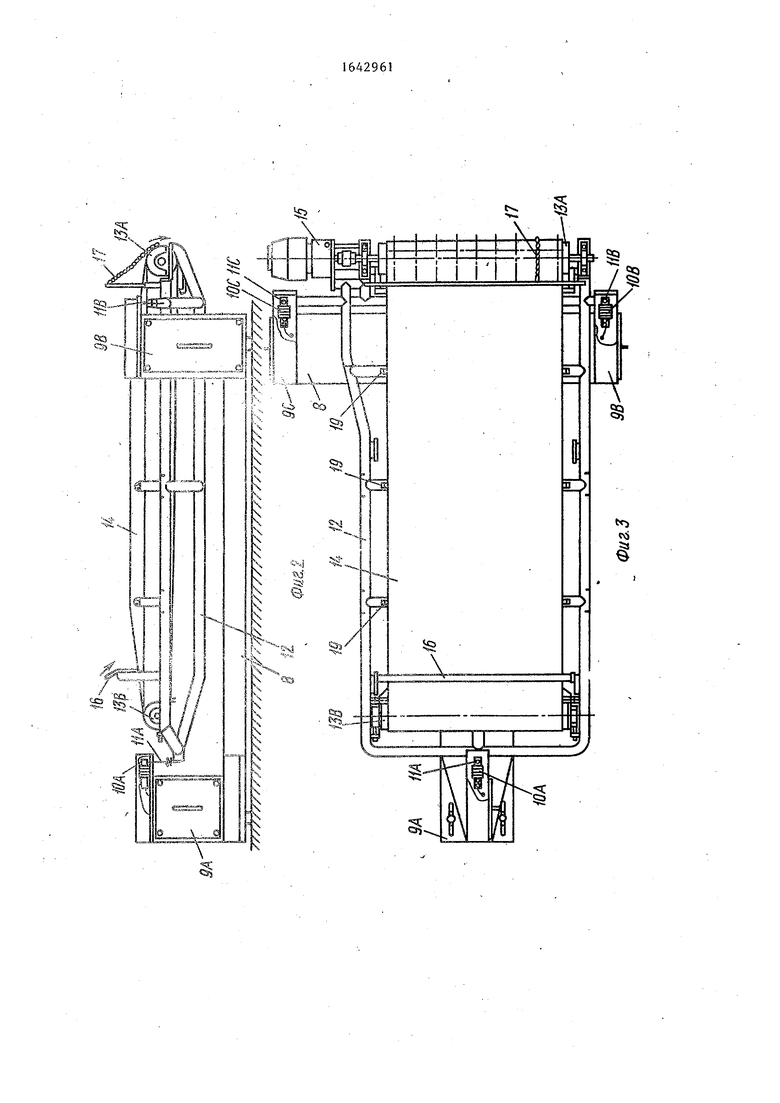
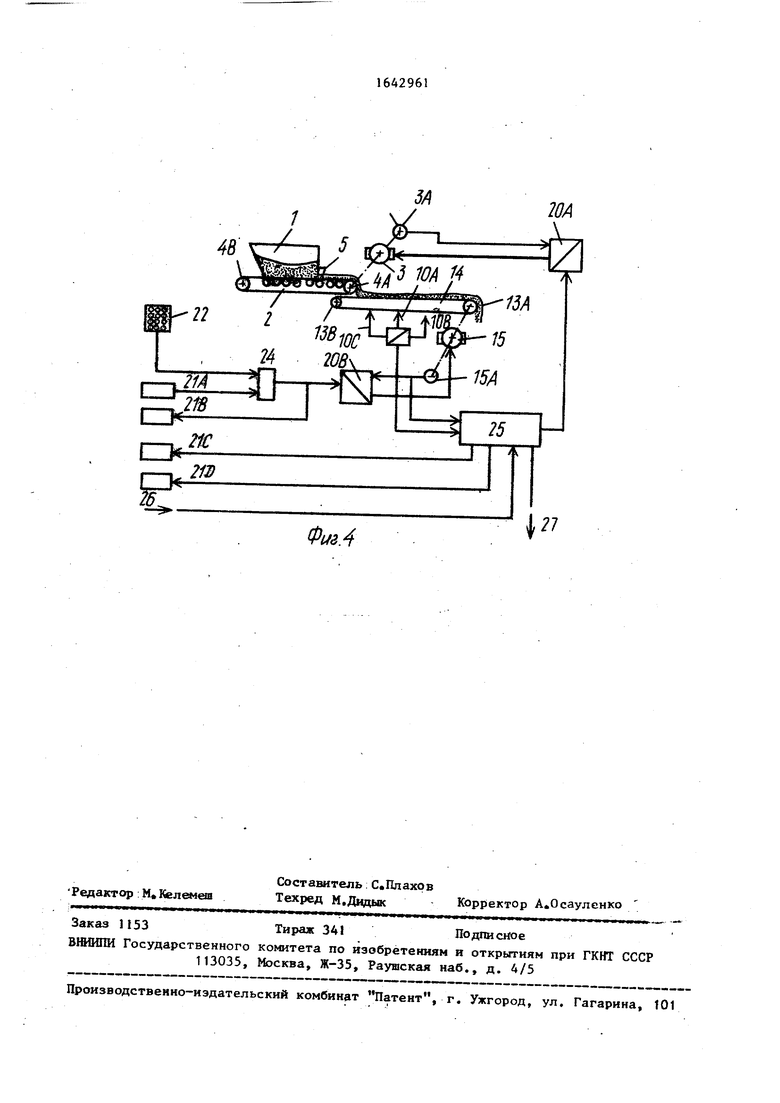
На фиг.1 изображена механическая часть весовой дозировки, вид сбоку; на фиг.2 и 3 - собственно дозатор, соответственно виды спереди и сверху на фиг. 4 - блок схема управления уст ройства весовой непрерывной дозиров- ки.
Устройство для весовой дозировки содержит накопительный бункер 1 с дозируемым материалом, под которым расположен ленточный экстрактор 2, бесконечная лента которого приводится в движение двигателем редуктором 3 постоянного тока с многослойной об моткой, снабженным датчиком ЗА скоро ти. Лента экстрактора 2 опирается на приводной и натяжной барабаны 4А, 4В. Барабан 4А связан с двигателем редуктором 3. На конце ленточного экстрактора 2 имеется колпак 5 ручно- го или автоматического управления, предназначенный для регулировки вы соты слоя материала, выносимого из накопительного бункера 1 лентой экстрактора 2.
Поперек ленты расположен ряд цепей 6, как раз перед падением материала с экстрактора 2 Эти цепи 6, образующие как бы поперечный занавес, предназначены для усреднения расхода и измельчения материала, что бы уменьшить действие от падения на блок собственного ленточного дозатора 7, который расположен под лентой экстрактора 2 и на одной линии с ней.
Ленточный дозатор 7 (фиг.2 и 3) состоит из неподвижного опорного каркаса 8 в форме Т, снабженного на своих концах тремя стойками 9А, 9В, 9С, на которых расположены трое флексион- ных весов 10А, 10В, ЮС с датчиками напряжений, снабженными гибкими треп сами 1 1А, 11В, ПС, к которым при- , креплена сверху легкая трубчатая рама 12. Последняя служит опорой для
0 5 Q
5
0
5
(
5
барабанов 13А, 13В бесконечной конвейерной ленты 14, которая приводит-- ся в движение с переменной скоростью с помощью двигателя-редуктора 15 по- стояиного тока с многослойной обмоткой и снабженного датчиком 15А скорости. Барабан 13А связан с двигателем-редуктором 15.
Для того, чтобы точно ограничить весоизмерительный участок, пластина 16 сброса установлена на задней части трубчатой рамы 12, находящейся под лентой экстрактора 2 для того, чтобы принимать материал, сбрасываемый этой лентой, а на выходе ленты 14 дозатора 7 установлен поперечный занавес из цепей 17 для измельчения материала в одном и том же месте и сброса его по стрелке Г на собирающий конвейер I8 для дальнейшей обработки. Кроме того, лента 14 дозатора 7 скользит по ряду несущих самоскользящих звеньев 19, наклонных кверху, которые приподнимают края ленты 14 дозатора вдоль всей части, где ществляется взвешивание.
Скорость, с которой приводится в движение лента экстрактора 2, своим двигателем-редуктором 3 автоматически регулируется в зависимости от мгновенного результата измерения нагрузки материала с помощью схемы регулировки Ff-Fg, изображенной на фиг.1 таким образом, что если мгновенное измерение нагрузки материала, распределенного на ленте 14 дозатора 7, не соответствует заданной величине, скорость ленты экстрактора 2 автоматически изменяется в большую или меньшую сторону для поддержания постоянной нагрузки материала, независимо от запрограммированной величины расхода дозатора.
Схема регулировки Fj-Fg с°держит следующие блоки: два блока 20А, 20В изменения скорости, четыре цифровых индикатора 21А, 21В, 21C, 2 ID, клавиатуру 22, датчик 23 веса, первое цифровое вычислительное устройство 24, регулятор 25 веса с вторым цифровым вычислительным устройством и механизмом 16 додачи команд и схему 27 управления сигналами тревоги.При этом опорный каркас 8 связан с датчиком 23 веса, датчи.к ЗА скорости двигателя-редуктора 3 связан своим выходом с блоком 20А регулировки ско роста экстрактора 2, первый выход KOI
торого связан с входом двигателя- редуктора 3 экстрактора 2, а датчик 15А скорости двигателя-редуктора 15 дозатора 7 связан своим выходом с первым входом блока 20В регулировки скорости дозатора 7, выход которого связан с входом двигателя-редуктора 15 дозатора 7. Датчик 23 веса выпол- нен в виде трех флексионных весов
10А, 10В, ЮС с датчиками напряжений
Первое вычислительное устройство 24 связано соответственно своим пер вым и вторым входами с клавиатурой 22 и первым индикатором 21А, а выхо- дом - с вторым входом блока 20В регулировки скорости дозатора 7 и вторым индикатором 21В, а регулятор 25 веса своим первым входом связан с датчиком 23 веса, вторым входом - с датчиком 15А скорости, а своими тремя выходами соответственно с вто- рым входом блока 20А регулировки скорости экстрактора 2, третьим 21С и четвертым 2 ID иидикаторани
Устройство работает следующим образом.
Лента 14 дозатора 7, которая получает материал от ленточного экстрактора 2, переносит этот материал до выхода, непрерывно обеспечивая мгновенное суммарное взвешивание датчиком 23 веса с помощью весов 10А 10В, 1 ОС и на строго определенной длине.
Лента 14 дозатора приводится в движение двигателем-редуктором 15 с определенной скоростью, соответствующей запрограммированному заданно 4 му расходу.
Согласно фиг.4 схема регулировки Fi-F для автоматической регулировки скорости ленты экстрактора 2 в зависимости от результата мгновенного измерения нагрузки на ленту 14 доза- тора скорректирована так, чтобы нагрузка материала на ленту оставалась постоянной независимо от запрограммированного расхода дозатора С этой целью, электронная часть образована из трех схем регулировки, соединенных в контур с обратной связью между ними, и из двух цифровых вычисли- тельных устройств с вспомогательным оборудованием
Блок регулировки содержит: цепь регулировки скорости ленты 14 ленточного дозатора 7, цепь регулиров
5 0 5
0
5 0 5
5
0
ки веса и цепь регулировки скорости ленты ленточного экстрактора 2
Первая цепь позволяет регулировать (с точностью до 1/1000} линей- t ную скорость ленты 14 ленточного дозатора 7 в зависимости от опорной величины чапрограммнрованного расхода дозатора Эта опорная еличина запрограммированного расхода дозатора индицируется (т/ч) на цифровом индикаторе 21В и является результатом подсчета, выработанного на основе двух сигналов, а именно: сигнала общей опорной величины блока дозаторов установки, причем этот цифровой сигнал (т/ч) поступает от клавиатурь 22; сигнала, идущего от рассматриваемого дозатора, который является коэффи - циентом пропорциональностт и состав- ляет собственно опорную величину этого последнего, выраженную в кг/т конечного продукта, причем этот сигнал вырабатывается кодирующими колесами и индицируется на щдикаторе 21 А
Два этих сигнала подаются на входы первого цифрового вычислительного устройства 24, выполняющего операцию: общая опорная величина (т/ч) х х коэффициент пропорциональности, соответствующий данному дозатору (кг/т) опорная величина запрограммированного расхода (кг/ч).
Приводимый в качестве примера блок дозировки был использован с общей опорной величиной в 32 т/ч и с опорной величиной для дозатора в 110 кг/т, что соответствует опорной величине запрограммированного расхода в 3520 кг/ч
Эта опорная величина запрограммированного расхода, с одной стороны, выводится на цифровой индикатор 21В, а с другой стороны, управляет устрой™ ством 20В изменения скорости двигателя-редуктора 15 ленточного дозатора 7.
Регулятор этого устройства изменения скорости постоянно поддерживает стабильность скорости двигателя-редуктора 15 и барабана 1 ЗА ленточного дозатора 7, сравнивая опор ную величину запрограммированного расхода на индикаторе 21 В с действительным результатом измерения скорости который вырабатывается датчиком 15А скорости, установленным на двигателе-редукторе 15,
Вторая цепь регулировки веса поз- воляет регулировать и точно выдержи 4 вать постоянную нагрузку материала на дозатор независимо от запрограм мированного расхода, т.е. независи- мо от скорости ленты дозатора С этой целью предусмотрен регулятор 25 веса, у которого имеется предвари тельно запрограммированная внутрен- няя опорная величина Кроме того, мгновенный действительный результат измерения веса на дозаторе, идущий от сигнала трех датчиков напряжений 10А, 10В и ЮС, соединенных параллельно, усиливается и фильтруется с помощью датчика 23 веса и подается на регулятор 25 веса с предвзритель но запрограммированной опорной вели- чиной.
Когда отклонение между этой опор ной величиной и действительным мгно- венным результатом измерения веса на дозаторе, идущим от датчика 23 веса, не равно нулю, регулятор подает по- ложительный или отрицательный коррек- тирующий сигнал на устройство 20А изменения скорости двигателя-редуктора 3 и барабана 4 А ленты ленточного экстрактора 2, что увеличивает или уменьшает поступление материала на дозатор, чтобы свести к нулю у станов ленное отклонение в весе
Заметим, что когда дозатор пуст, при пуске выходной сигнал этого регулятора подавляется сигналом от гене ратора линейно изменяющейся функции, что в результате приводит к последовательной и однородной загрузке дозатора, и когда вес на дозаторе соответствует предварительно запро граммированной внутренней опорной величине, регулятор снова вступает в действие и поддерживает постоянный вес на дозаторе
Третья цепь регулировки скорости ленты экстрактора позволяет регули- ровать с большой точностью линейную скорость ленты экстрактора 2 в зависимости от сигнала коррекции, выдан ного регулятором 25 веса С этой целью регулятор 25 веса формирует на выходе положительные или отрицательные корректирующие единичные импульсы, которые предварительно смешиваются с сигналом опорной величины запрограммированного расхода дозатора первой цепи. Сигнал, полученный в результате смешивания, служит опорной
0
5
0
5
0
5
0
5
0
5
величиной для устройства 20А изменения скорости блока двигателя-редуктора 3 ленты экстрактора 2,
Регулятор этого устройства изменения скорости непрерывно регулирует скорость двигателя экстрактора, сравнивая эту опорную корректирующую величину с действительным результатом измерения скорости, идущим от датчика ЗА скорости, установленного в блоке Двигателя-редуктора 3.
Второе вычислительное устройство, встроенное в регулятор 25 веса, имеет целью вычислить такую функцию: деист вительный мгновенный расход деист-1 дательный мгновенный вес на дозаторе х денствьтельную мгновенную величину скорости ленты дозатора. С этой целью данные веса поступают от датчика 23 веса и подаются на один из входов вычислительного устройства регулятора 25, в то время как данные скорости, идущие от датчика J5A скорости, установленного на двигателе-редукторе 15 привода ленты 14 дозатора 7, приходят в цифровой кодированной форме и подаются на другой вход вычислительного устройства
Результат вычисления мгновенного действительного расхода непосредственно индицируется на цифровом индикаторе 21 С Следбвательно, имеется возможность сразу проверить хорошую работу дозатора, сравнив показания двух устройств: опорную величину расхода индикатора 21 и действительный мгновенный расход на индикаторе 21C (эти показания должны быть идентичными при нормальной работе).
Данное вычислительное устройство в регуляторе 25 веса позволяет также обеспечить при помощи двух электронных сэсем расчет и управление сигналами тревоги.
Для расчета выходной линейный сигнал действительного мгновенного расхода преобразуется в импульсный пропорциональный сигнал, позволяющий получить сигнал, соответствующий требованиям, т.е. один импульс на единицу обрабатываемого материала, как например, один импульс на 100 г или импульс на 1 кг и т.д. Полученный адаптированный сигнал затем просчитывается и запоминается в цифровом индикаторе 2 ID, позволяющем знать количество прошедшего материала.
Для управления сигналами тревоги, сигнал действительного мгновенного расхода сравнивается с сигналом 6пор ной величины расхода на индикаторе 21В дозатора. Если сигнал превышает один из этих порогов, схема 27 управ ления включает «ерез заданный промежуток времени световую и/или звуковую тревоги и через заданный больший промежуток времени другое реле управления прерыванием общей опорной вели чины дозирующей установки
Соответствующие команды могут быть поданы ка второе вычислительное устройство регулятора 22 веса в механизм 26 подачи команд Формула изобретения
Устройство для весовой дозировки гранулированного или порошкообразно- го материала, содержащее накопитель ный бункер для дозируемого материала, расположенный под ним ленточный экстрактор, один из опорных бараба- нов которого связан с одним двига- телем™редуктором, ленточный дозатор, один из барабанов которого связан с другим двигателем-редуктором, расположенный под сходом ленточного экст™ рактора в одну линию с ним и выполненный с неподвижным опорным каркаг сом, связанным с датчиком веса, датчик скорости двигателя-редуктора экстрактора, связанный своим выходом с блоком регулировки скорости ленты экстрактора, первый выход которого , связан с входом двигателя-редуктора экстрактора, и датчик скорости дви-
64296110
гателя-редуктор а дозатора, связанный своим выходом с первым входом блока регулировки скорости ленты дозатора, выход которого связан с входом двигателя-редуктора дозатора, о т л и - чающее ся тем, что, с целью повышения точности, в него введены первое цифровое вычислительное уст-
JQ тройство, регулятор веса с вторым вычислительным устройством и схемой управления сигналами тревоги, четыре цифровых индикатора и клавиатура, датчик веса выполнен в виде трех
t5 флексионных весов с датчиками напряжений, а каркас выполнен Т-образным со стойками на концах и сверхлегкой трубчатой рамой, на которой закреплены барабаны ленточного дозатора,
20 причем трубчатая рама подвешена с помощью гибких тросов к датчикам веса с датчиками напряжений, установленных на стойках, первое вычислительное устройство связано соот-
2S ветственно своими первым и вторым входами с клавиатурой и первым индикатором, а выходом - с вторым вхо дом блока регулировки скорости ленты дозатора и вторым индикатором, а ре-
30 гулятор веса своими первым входом связан с датчиком веса, вторым входом - с датчиком скорости дозатора, а своими тремя выходами связан соответственно с вторым входом блока ре35 гулировки скорости ленты экстрактора, третьим индикатором и четвертым индикатором
, 9А НА
1L
/
1QA
16
-
X
J3r
Hj.
u
-Ш
Jan
Фиг.З
9B.//
Ш
24
Ш;де
ж
21$
ФилА
де ч
К
ё--15А
25
21
