Изобретение относится к машиностроению, в частности к способу опускания поворотной части радиотелескопа на шаровое основание одновременно несколькими домкратами, и может быть использовано при монтаже цилиндрических конструкций, труб большого диаметра в химической, металлургической, судостроительной и других областях техники.
Целью изобретения является повышение надежности путем обеспечения безударности при сопряжении поверхностей объекта и основания.
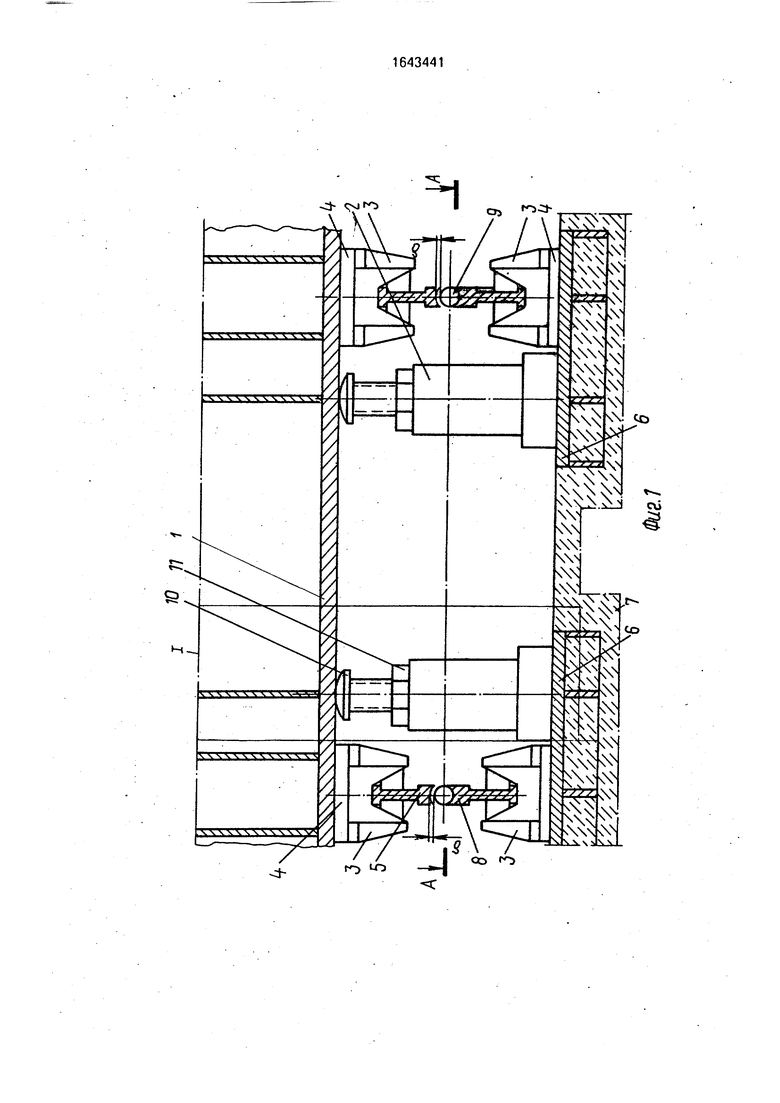
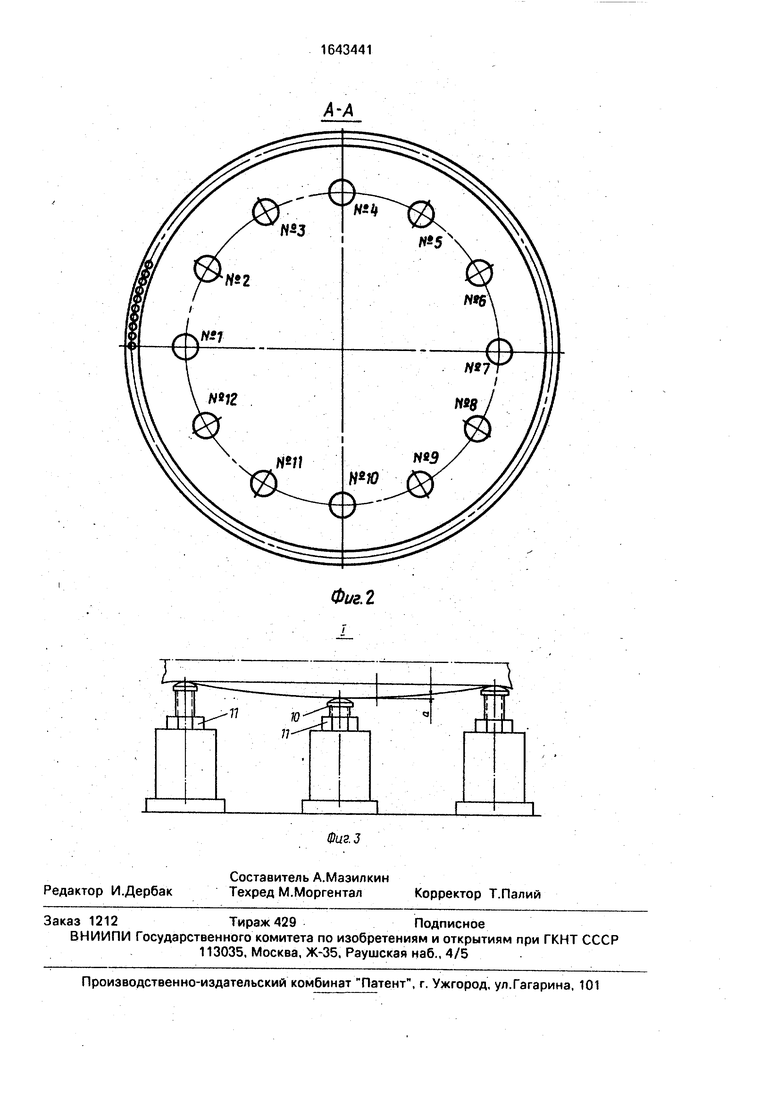
На фиг. 1 показана поворотная плат- Форма на гидродомкратах с зазором б между верхним кольцом шарового погона и шарами; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - узел I на фиг. 1.
Поворотная платформа 1 установлена на двенадцати домкратах 2. На нижней плоскости платформы 1 посредством кронштейнов 3 через пригоночные прокладки 4 закреплено верхнее кольцо 5 шарового погона. На основании 6, установленном на фундаменте 7, посредством кронштейнов 3 через лрогоночные прокладки 4 закреплено нижнее кольцо 8 шарового погона, на котором размещаются шары 9. Домкраты 2 размещаются в зоне установки шарового погона.
Нагрузка от поворотной платформы передается через штоки 10 домкратов 2 и гайки 11 на корпуса домкратов и на основание 6. Платформа 1 в технологическом положении (фиг. 1) размещается с зазором 6 1 - 3 мм между шарами и дном дорожки качения верхнего кольца шарового погона.
Способ осуществляется следующим образом.
О ± СО
Ј
Для опускания поворотной платформы из технологического положения в штатное предварительно измеряют величины упругой деформации под каждым из домкратов последовательно.
Для этого устанавливают в районе каждого гидродомкрата (не показано) стойку с индикатором. Подают давление в гидродомкрат до момента возможности свинчивания гайки 11 со штока 10, фиксируют показания индикатора. Свинчивают гайку 11 и сбрасывают давление в гидродомкрате, записывают показания индикатора Вновь подают давление в гидродомкрат, устанавливают гайку 11 в первоначальное положение и сбрасывают давление до 0 кг/см2.
Повторяют указанную операцию для каждого из домкратов и тем самым определяют деформации платформы под каждым из них.
Ввиду того, что уравновесить вес платформы в несколько тысяч тонн относительно центра размещения домкратов практически невозможно, да и в этом нет необходимости, так как шары выбираются с многократным запасом по контактным напряжениям, нагрузки на домкраты и соответственно деформации под ними будут различны.
Сравнивают данные, полученные по деформациям платформы, выбирают минимальную из них и используют ее величину в дальнейшем при опускании поворотной части.
Минимальную величину деформации берут, чтобы при опускании поворотной части на шаг, равный величине деформации, поворотная часть не отрывалась ни от одного из домкратов. В противном случае часть домкратов в определенный промежуток времени выключается из работы.
Определяют минимальную величину прогиба а (фиг. 3).
Определяют расчетным путем угол а. на который нужно повернуть гайки 11 штоков 10, чтобы обеспечить первую ступень опускания платформы на величину а по форму- 5 ле
360 х а
а -.
где S - шаг резьбы, мм;
а - величина ступеньки опускания, мм;
10 а- угол поворота гайки, град.
Далее подают давление, например, во все четные по номерам гидродомкраты до момента возможности свинчивания гаек 11, свинчивают гайки на угол а, сбрасывают
15 давление до нуля, в результате чего платформа опускается на величину а, упираясь гайками 11 в корпуса домкратов. Следующую операцию производят с нечетными домкратами, опуская платформу на величи20 ну 2 а. Последующее ступенчатое опускание производится с шагом 2 а до соприкосновения верхнего кольца шарового погона 5 с шарами 9.
25
Формула изобретения
Способ опускания объекта на основание, заключающийся в том, что объект опирают на группы домкратов, равномерно
30 расположенных по окружности, попускают их шаговым методом, отличающийся тем, что, с целью повышения надежности путем обеспечения безударности при сопряжении поверхностей объекта и основа35 ния, опускание производят поочередно двумя группами домкратов, расположенных через один, предварительно определяют величину упругой деформации объекта под каждым из домкратов и первое опускание
40 одной группы домкратов производят на шаг, равный величине минимальной упругой деформации, а последующие - на шаг, равный двум ее величинам.
25
Формула изобретения
Способ опускания объекта на основание, заключающийся в том, что объект опирают на группы домкратов, равномерно
расположенных по окружности, попускают их шаговым методом, отличающийся тем, что, с целью повышения надежности путем обеспечения безударности при сопряжении поверхностей объекта и основания, опускание производят поочередно двумя группами домкратов, расположенных через один, предварительно определяют величину упругой деформации объекта под каждым из домкратов и первое опускание
одной группы домкратов производят на шаг, равный величине минимальной упругой деформации, а последующие - на шаг, равный двум ее величинам.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 1970 |
|
SU261838A1 |
| Способ монтажа поворотной части телескопа на основании гидростатических опорах | 1985 |
|
SU1325244A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 1994 |
|
RU2092424C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 1970 |
|
SU271952A1 |
| СПОСОБ СООРУЖЕНИЯ СБОРНО-МОНОЛИТНОЙ КРЕПИ СТВОЛА ГОРНОГО ПРЕДПРИЯТИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2631061C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВЫХ ГИДРАВЛИЧЕСКИХ ЭКСКАВАТОРОВ | 2005 |
|
RU2310044C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА МАСС | 2011 |
|
RU2495386C2 |
| ЦЕЛЬНОМЕТАЛЛИЧЕСКИЙ ВИБРОИЗОЛЯТОР "ПУСТОТЕЛЫЙ ГОЛЫШ" (ЦВПГ) (ВАРИАНТЫ) И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2012 |
|
RU2534850C2 |
| СТВОЛОПРОХОДЧЕСКИЙ КОМБАЙН | 2015 |
|
RU2600807C1 |
| Азимутальный привод радиотелескопа | 1985 |
|
SU1283882A1 |
Изобретение относится к машиностроению, в частности к способу опускания цилиндрических конструкций на основание, и предназначено для опускания поворотной части радиотелескопа на шаровое основание несколькими домкратами. Целью изобретения является повышение надежности опускания поворотной части на основание . ,/ ОСрое цие, и ной оваизоости ние путем обеспечения безударности при сопряжении поверхностей объекта и основания. Предварительно измеряют величину упругой деформации под каждым из домкратов последовательно. Сравнивают данные, полученные по деформациям платформы, выбирают минимальную из них и используют ее величину при опускании поворотной части. Опускание производят одновременно несколькими домкратами (например, четными), а затем другими домкратами, например нечетными, т.е. попеременно опирают платформу на группы домкратов, равномерно расположенные по окружности. Первое опускание производят на шаг, равный величине минимальной упругой деформации, а последующие - на шаг, равный двум ее величинам. 3 ил. И
Фиг. 2
| Устройство для подъема цилиндрических конструкций | 1978 |
|
SU719963A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
