t
(21)4675689/03
(22)11.04.89
(46) 23.04.91. Бюл. № 15
(71)Псковский филиал Ленинградского политехнического института им.М.И.Калинина
(72)В.Д.Глебов, А.И.Тархов, В.М.Иванова и А.М.Ветлицьш
(53)621.879(088.8)
(56)Авторское свидетельство СССР № 1204680, кл. Е 02 F 3/38, 1982.
Авторское свидетельство СССР № 1209780, кл. Е 02 F 9/16, 1984.
(54)ЭКСКАВАТОР
(57)Изобретение относится к землеройной технике, а именно к экскаваторам
с поворотной платформой и кабиной.
Цель - повышение производительности путем улучшения условий управления. Экскаватор содержит ходовую тележку 1, поворотную платформу 2 и рабочее оборудов.ание 3. На тележке 1 смонтирована поворотная колонка 4, расположенная соосно с платформой 2. На верхнем конце колонки 4 закреплена консоль 5, на которой расположена кабина 7. При работе поднимают кабину 7 в верхнее положение. Затем поворачивают колонку 4 и кабину 7 в положение, удобное для визуального контроля за набором грунта.в ковш и за его разгрузкой в транспортное средство. 1 з.п. ф-лы, 2 ил.
(Я
| название | год | авторы | номер документа |
|---|---|---|---|
| Экскаватор | 2022 |
|
RU2806786C1 |
| Экскаватор | 1990 |
|
SU1788154A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 2019 |
|
RU2719698C1 |
| ЭКСКАВАТОР | 2006 |
|
RU2318964C2 |
| КОЛЕСНЫЙ ГИДРАВЛИЧЕСКИЙ ЭКСКАВАТОР | 2000 |
|
RU2185481C2 |
| Рабочее оборудование гидравлического экскаватора | 2019 |
|
RU2720039C1 |
| Одноковшовый экскаватор | 1989 |
|
SU1714048A1 |
| Путевая машина | 2017 |
|
RU2653979C2 |
| РАБОЧЕЕ ОРУДИЕ | 1991 |
|
RU2046885C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 2008 |
|
RU2380487C1 |
Изобретение относится к землеройной технике, конкретно к экскаваторам с поворотной платформой и кабиной.
Цель изобретения - повышение производительности путем улучшения условий управления.
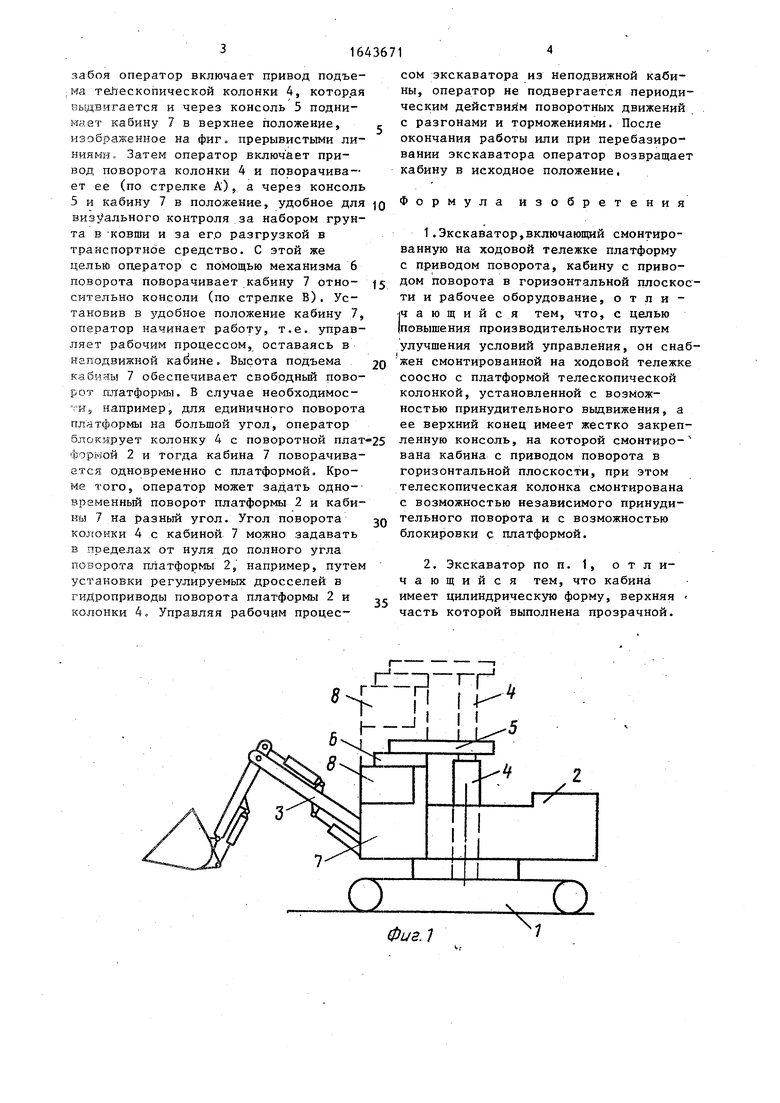
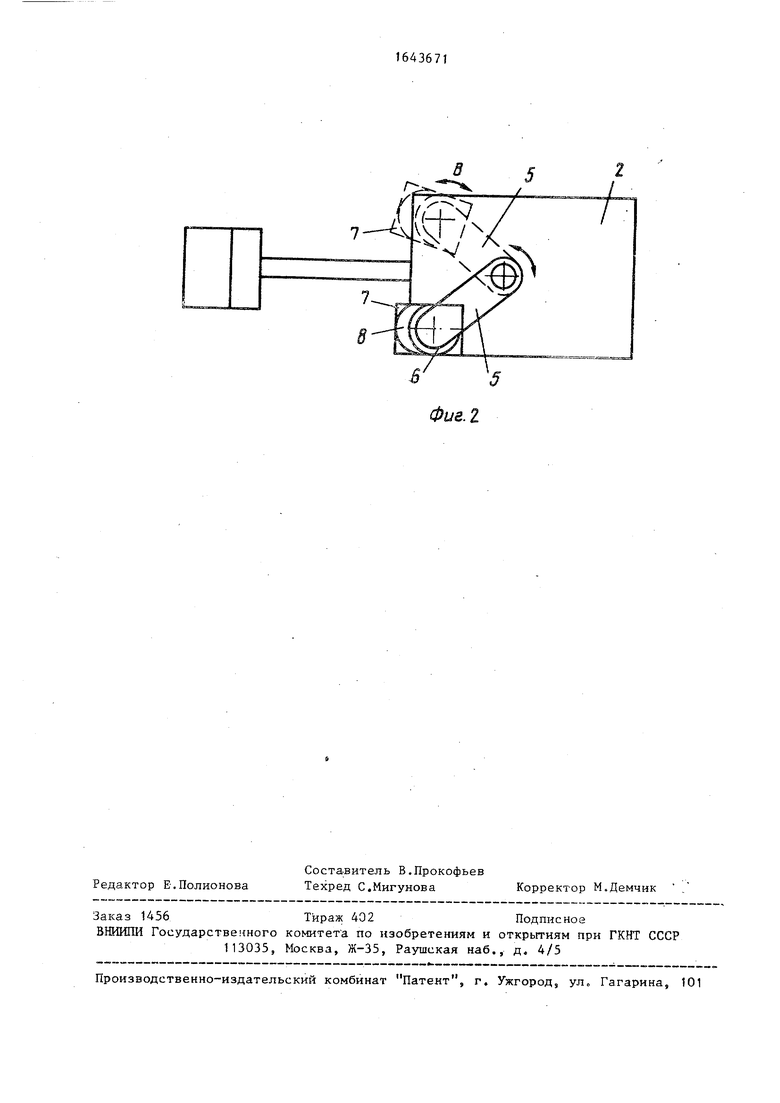
На фиг. 1 изображена схема экскаватора, вид сбоку; на фиг. 2 - то же, вид в плане.
Экскаватор содержит ходовую тележку 1 и поворотную платформу 2 с рабочим оборудованием 3. Поворотная телескопическая колонка 4 установлена нижним концом на ходовой тележке 1 и имеет приводы поворота и осевого выдвижения. Поворотная колонка 4 установлена на геометрической оси- вращения поворотной платформы 2 и к ее верхнему концу прикреплена консоль 5. К консоли 5 через механизм 6 поворота прикреплена кабина 7. Верхняя смотровая прозрачная часть 8 кабины выполнена в форме цилиндра. В кабине установлены блоки дистанционного управления, связанные линиями управления через консоль 5 и колонку 4 с распределительными устройствами управления.
Работа экскаватора заключается в следующем.
Кабина 7 занимает традиционное для известных экскаваторов положение (на фиг. 1 показано сплошными линиями). При таком положении кабины 7 осуществляют транспортные перемещения экскаватора, а также управление рабочим процессом, если это необходимо по техническим соображениям, например, для поворота платформы на большой угол 120-180°.
После установки экскаватора и транспортного средства относительно
&
3
СО
о
Сч|
забоя оператор включает привод подъема телескопической колонки 4, которая выдвигается и через консоль 5 поднимает кабину 7 в верхнее положение, изображенное на фиг прерывистыми линиями. Затем оператор включает привод поворота колонки 4 и поворачивает ее (по стрелке А) , а через консоль 5 и кабину 7 в положение, удобное для визуального контроля за набором грунта в ковши и за его разгрузкой в транспортное средство. С этой же цельй оператор с помощью механизма 6 поворота поворачивает кабину 7 относительно консоли (по стрелке В). Установив ъ удобное положение кабину 7, оператор начинает работу, т.е. управляет рабочим процессом, оставаясь в неподвижной кабине. Высота подъема кабч-ш 7 обеспечивает свободный поворот платформы. В случае необходимоеи, например, для единичного поворота пр-атформы на большой угол, оператор блокирует колонку 4 с поворотной плат чзэрмой 2 и тогда кабина 7 поворачивается одновременно с платформой. Кроме того, оператор может задать одно- врзменный поворот платформы 2 и кабины 7 на разный угол. Угол поворота колонки 4 с кабиной 7 можно задавать в пределах от нуля до полного угла поворота платформы 2, например, путем установки регулируемых дросселей в гидроприводы поворота платформы 2 и
колонки 4 о Управляя рабочим процес
5
5
0
0
5
сом экскаватора из неподвижной кабины, оператор не подвергается периодическим действиям поворотных движений с разгонами и торможениями. После окончания работы или при перебазировании экскаватора оператор возвращает кабину в исходное положение.
Формула изобретения
О
zn
Фиг.1
V
,f M-v
V
