сообщена с поршневой полостью гидроцилиндра 7 привода рукоятки. Гидрораспреде- литель выполнен с подпружиненным золотником и снабжен механизмом 26 регулирования упругости пружины, например, винтовым.
Экскаватор действует следующим образом. В исходном положении, изображенном на фиг.1 сплошными линиями, кабина 12 занимает место на поворотной платформе 2, так же как и противовесЭ. Шток гидроцилиндра 18 поднят пружиной 19 и захват 17 занимает среднее положение в пазу 15, не касаясь поворотной платформы 2.
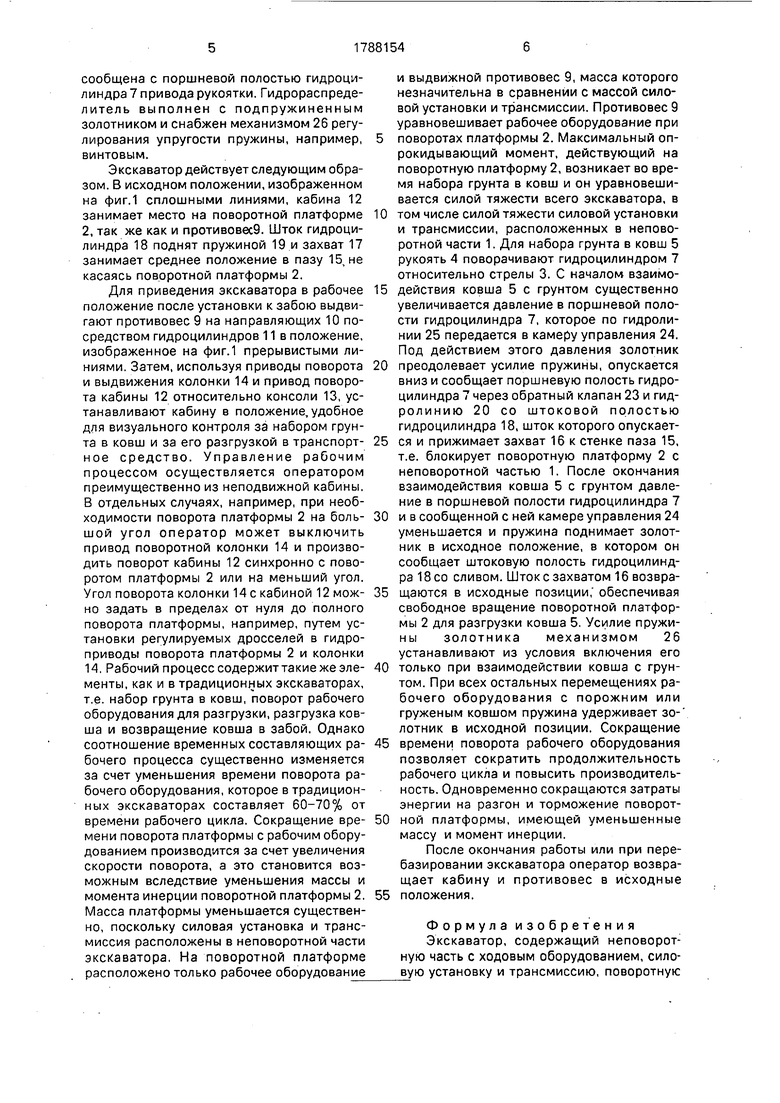
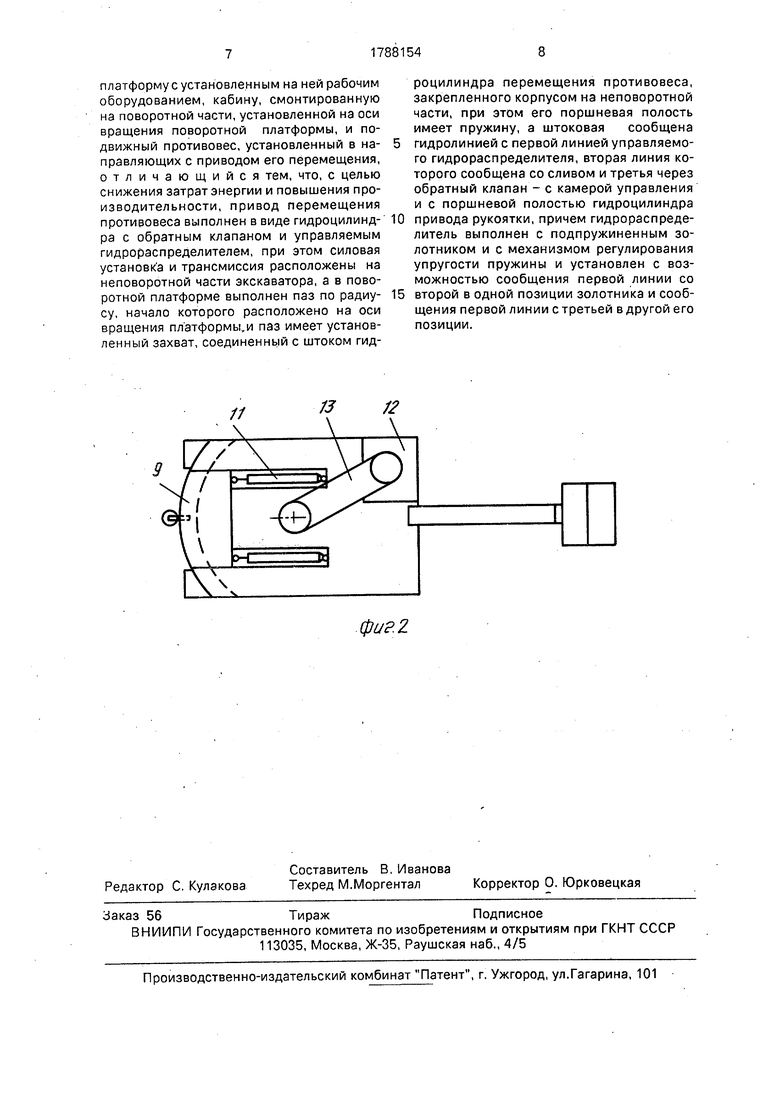
Для приведения экскаватора в рабочее положение после установки к забою выдвигают противовес 9 на направляющих 10 посредством гидроцилиндров 11 в положение, изображенное на фиг.1 прерывистыми линиями. Затем, используя приводы поворота и выдвижения колонки 14 и привод поворота кабины 12 относительно консоли 13, устанавливают кабину в положение, удобное для визуального контроля за набором грунта в ковш и за его разгрузкой в транспорт- ное средство. Управление рабочим процессом осуществляется оператором преимущественно из неподвижной кабины. В отдельных случаях, например, при необходимости поворота платформы 2 на большой угол оператор может выключить привод поворотной колонки 14 и производить поворот кабины 12 синхронно с поворотом платформы 2 или на меньший угол. Угол поворота колонки 14с кабиной 12 можно задать в пределах от нуля до полного поворота платформы, например, путем установки регулируемых дросселей в гидроприводы поворота платформы 2 и колонки 14. Рабочий процесс содержит такие же элементы, как и в традиционных экскаваторах, т.е. набор грунта в ковш, поворот рабочего оборудования для разгрузки, разгрузка ковша и возвращение ковша в забой. Однако соотношение временных составляющих рабочего процесса существенно изменяется за счет уменьшения времени поворота рабочего оборудования, которое в традиционных экскаваторах составляет 60-70% от времени рабочего цикла. Сокращение времени поворота платформы с рабочим оборудованием производится за счет увеличения скорости поворота, а это становится возможным вследствие уменьшения массы и момента инерции поворотной платформы 2. Масса платформы уменьшается существенно, поскольку силовая установка и трансмиссия расположены в неповоротной части экскаватора. На поворотной платформе расположено только рабочее оборудование
и выдвижной противовес 9, масса которого незначительна в сравнении с массой силовой установки и трансмиссии. Противовес 9 уравновешивает рабочее оборудование при
поворотах платформы 2. Максимальный опрокидывающий момент, действующий на поворотную платформу 2, возникает во время набора грунта в ковш и он уравновешивается силой тяжести всего экскаватора, в
том числе силой тяжести силовой установки и трансмиссии, расположенных в неповоротной части 1. Для набора грунта в ковш 5 рукоять 4 поворачивают гидроцилиндром 7 относительно стрелы 3. С началом взаимодействия ковша 5 с грунтом существенно увеличивается давление в поршневой полости гидроцилиндра 7, которое по гидролинии 25 передается в камеру управления 24. Под действием этого давления золотник
преодолевает усилие пружины, опускается вниз и сообщает поршневую полость гидроцилиндра 7 через обратный клапан 23 и гид- ролинию 20 со штоковой полостью гидроцилиндра 18, шток которого опускается и прижимает захват 16 к стенке паза 15, т.е. блокирует поворотную платформу 2 с неповоротной частью 1. После окончания взаимодействия ковша 5 с грунтом давление в поршневой полости гидроцилиндра 7
и в сообщенной с ней камере управления 24 уменьшается и пружина поднимает золотник в исходное положение, в котором он сообщает штоковую полость гидроцилиндра 18 со сливом. Шток с захватом 16 возвращаются в исходные позиции, обеспечивая свободное вращение поворотной платформы 2 для разгрузки ковша 5. Усилие пружины золотника механизмом 26 устанавливают из условия включения его
только при взаимодействии ковша с грунтом. При всех остальных перемещениях рабочего оборудования с порожним или груженым ковшом пружина удерживает зо- лотник в исходной позиции. Сокращение
времени поворота рабочего оборудования позволяет сократить продолжительность рабочего цикла и повысить производительность. Одновременно сокращаются затраты энергии на разгон и торможение поворотной платформы, имеющей уменьшенные массу и момент инерции.
После окончания работы или при перебазировании экскаватора оператор возвращает кабину и противовес в исходные
положения.
Формула изобретения Экскаватор, содержащий неповоротную часть с ходовым оборудованием, силовую установку и трансмиссию, поворотнук:
платформу с установленным на ней рабочим оборудованием, кабину, смонтированную на поворотной части, установленной на оси вращения поворотной платформы, и подвижный противовес, установленный в направляющих с приводом его перемещения, отличающийся тем, что, с целью снижения затрат энергии и повышения производительности, привод перемещения противовеса выполнен в виде гидроцилиндра с обратным клапаном и управляемым гидрораспределителем, при этом силовая установка и трансмиссия расположены на неповоротной части экскаватора, а в поворотной платформе выполнен паз по радиусу, начало которого расположено на оси вращения платформыуи паз имеет установленный захват, соединенный с штоком гид0
5
роцилиндра перемещения противовеса, закрепленного корпусом на неповоротной части, при этом его поршневая полость имеет пружину, а штоковая сообщена гидролинией с первой линией управляемого гидрораспределителя, вторая линия которого сообщена со сливом и третья через обратный клапан - с камерой управления и с поршневой полостью гидроцилиндра привода рукоятки, причем гидрораспределитель выполнен с подпружиненным золотником и с механизмом регулирования упругости пружины и установлен с возможностью сообщения первой линии со второй в одной позиции золотника и сообщения первой линии с третьей в другой его позиции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1991 |
|
RU2018585C1 |
| Экскаватор | 2022 |
|
RU2806786C1 |
| Ковшовый экскаватор | 2021 |
|
RU2769198C1 |
| Одноковшовый экскаватор | 1990 |
|
SU1763586A1 |
| Рабочее оборудование гидравлического экскаватора | 1989 |
|
SU1745842A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 2018 |
|
RU2709270C1 |
| ЭКСКАВАТОР | 2020 |
|
RU2748020C1 |
| Самоходный гидравлический экскаватор | 1984 |
|
SU1313956A1 |
| Одноковшовый экскаватор | 1989 |
|
SU1714048A1 |
| Гидропривод рабочего оборудования одноковшового экскаватора | 1982 |
|
SU1134679A1 |

фи.2
