w
fc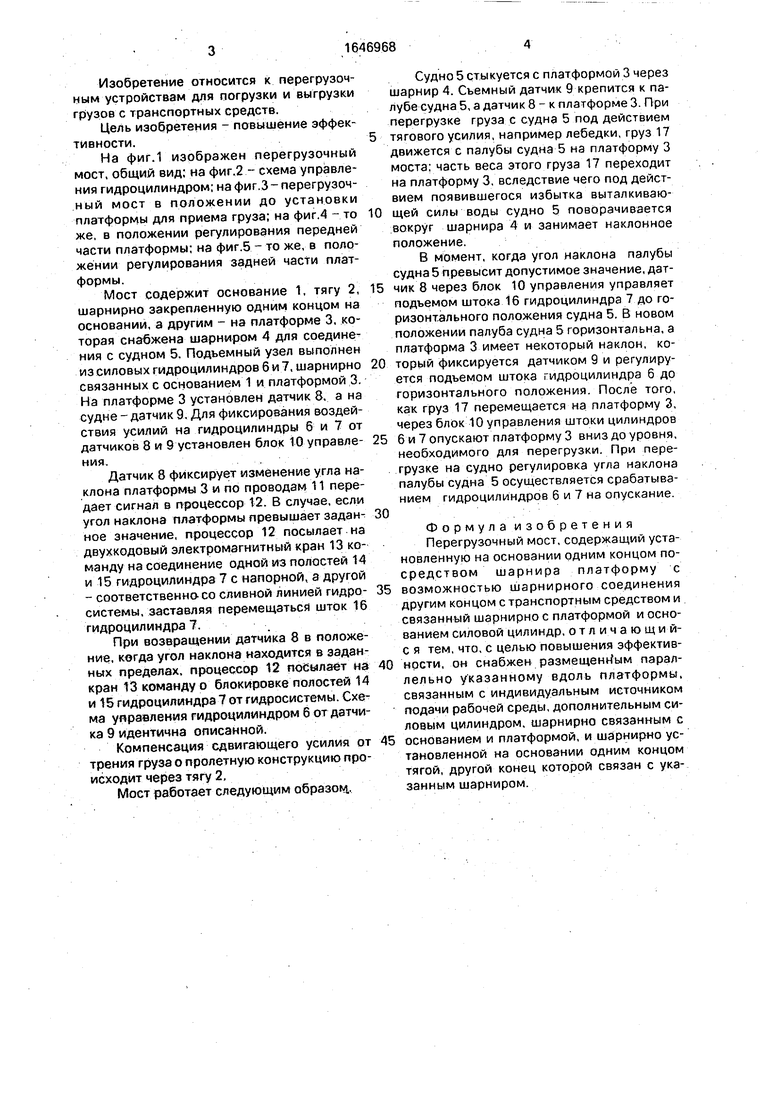
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО И ГИДРАВЛИЧЕСКАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2259280C1 |
| ПЕРЕГРУЗОЧНЫЙ КОМПЛЕКС КАШЕВАРОВА | 1990 |
|
RU2009094C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ЖИДКОГО ГРУЗА, ПРЕИМУЩЕСТВЕННО С МОРСКОЙ СТАЦИОНАРНОЙ ПЛАТФОРМЫ НА ТАНКЕР | 1999 |
|
RU2162044C1 |
| Перегружатель гидравлический полноповоротный с дополнительным противовесом | 2019 |
|
RU2717108C1 |
| Устройство для передачи грузов в море | 1986 |
|
SU1397365A1 |
| ПРИЦЕПНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ ЖИВОТНЫХ | 2014 |
|
RU2561175C1 |
| Плавучая платформа, совмещенная с малыми судами на сжатом пневмопотоке | 2021 |
|
RU2835223C2 |
| Мост-трап | 1952 |
|
SU94360A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТРАНСПОРТНО-ПЕРЕГРУЗОЧНЫЙ КОМПЛЕКС | 2005 |
|
RU2293042C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ГРУЗООБРАБОТКИ СУДНА-БАРЖЕВОЗА | 2008 |
|
RU2388646C1 |

Изобретение относится к перегрузочным устройствам для погрузки и выгрузки грузов из транспортных средств. Цель изобретения - повышение эффективности. Перегрузочный мост содержит основание 1. тягу 2 и платформу 3 с гидроцилиндрами 6 и 7. которые регулируют уровень ее установки посредством датчиков 8 и 9 и блока 10 управления. Платформа 3 соединяется шарниром 4 с судном 5. После установки судна м соединения его с платформой 3 посредст- вом шарнира 4 происходит перемещение груза на судно или с судна, при этом в случае перекоса платформы 3 датчики 8 и 9 передают соответствующие сигналы ма блок 10 управления, который производит установку платформы на необходимый уровень. 5 ил.
/ ч лччул
1 6 7
Ј
О
ю о оо
Изобретение относится к перегрузочным устройствам для погрузки и выгрузки грузов с транспортных средств.
Цель изобретения - повышение эффективности.
На фиг.1 изображен перегрузочный мост, общий вид; на фиг.2 - схема управления гидроцилиндром; на фиг.3-перегрузочный мост в положении до установки платформы для приема груза; на фиг.4 - то же, в положении регулирования передней части платформы; на фиг.5 - то же, в положении регулирования задней части платформы.
Мост содержит основание 1, тягу 2, шарнирно закрепленную одним концом на основании, а другим - на платформе 3, которая снабжена шарниром 4 для соединения с судном 5, Подъемный узел выполнен из силовых гидроцилиндров 6 и 7, шарнирно связанных с основанием 1 и платформой 3. На платформе 3 установлен датчик 8, а на судне -датчик 9. Для фиксирования воздействия усилий на гидроцилиндры б и 7 от датчиков 8 и 9 установлен блок 10 управления.
Датчик 8 фиксирует изменение угла наклона платформы 3 и по проводам 11 передает сигнал в процессор 12. В случае, если угол наклона платформы превышает заданное значение, процессор 12 посылает на двухкодовый электромагнитный кран 13 команду на соединение одной из полостей 14 и 15 гидроцилиндра 7 с напорной, а другой - соответственно-со сливной линией гидросистемы, заставляя перемещаться шток 16 гидроцилиндра 7.
При возвращении датчика 8 в положение, когда угол наклона находится в заданных пределах, процессор 12 посылает на кран 13 команду о блокировке полостей 14 и 15 гидроцилиндра 7 от гидросистемы. Схема управления гидроцилиндром б от датчика 9 идентична описанной.
Компенсация сдвигающего усилия от трения груза о пролетную конструкцию происходит через тягу 2,
Мост работает следующим образом..
Судно 5 стыкуется с платформой 3 через шарнир 4. Съемный датчик 9 крепится к палубе судна 5, а датчик 8 - к платформе 3. При перегрузке груза с судна 5 под действием
тягового усилия, например лебедки, груз 17 движется с палубы судна 5 на платформу 3 моста; часть веса этого груза 17 переходит на платформу 3. вследствие чего под действием появившегося избытка выталкивающей силы воды судно 5 поворачивается вокруг шарнира 4 и занимает наклонное положение,
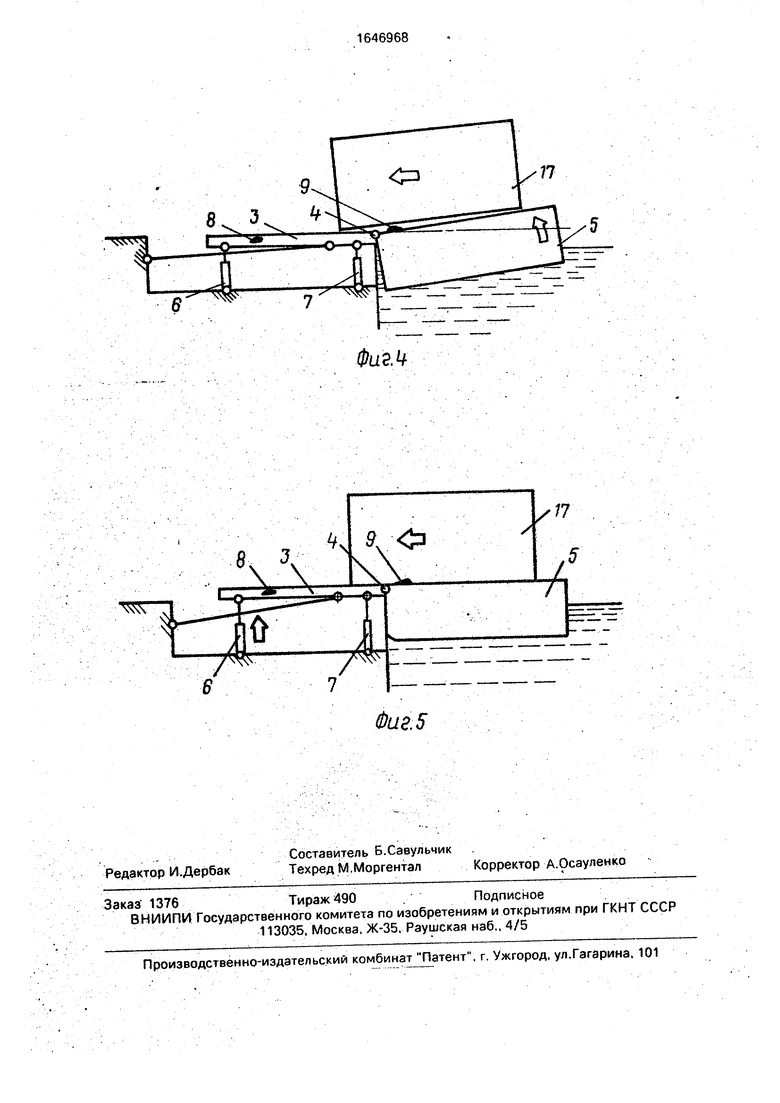
В момент, когда угол наклона палубы судна 5 превысит допустимое значение, датчик 8 через блок 10 управления управляет подъемом штока 16 гидроцилиндра 7 до горизонтального положения судна 5. В новом положении палуба судна 5 горизонтальна, а платформа 3 имеет некоторый наклон, который фиксируется датчиком 9 и регулируется подъемом штока гидроцилиндра б до горизонтального положения. После того, как груз 17 перемещается на платформу 3, через блок 10 управления штоки цилиндров
6 и 7 опускают платформу 3 вниз до уровня, необходимого для перегрузки. При перегрузке на судно регулировка угла наклона палубы судна 5 осуществляется срабатыванием гидроцилиндров 6 и 7 на опускание.
Формула изобретения Перегрузочный мост, содержащий установленную на основании одним концом посредством шарнира платформу с
возможностью шарнирного соединения другим концом с транспортным средством и связанный шарнирно с платформой и основанием силовой цилиндр, отличающий- с я тем, что, с целью повышения эффективности, он снабжен размещенным параллельно указанному вдоль платформы, связанным с индивидуальным источником подачи рабочей среды, дополнительным силовым цилиндром, шарнирно связанным с
основанием и платформой, и шарнирно установленной на основании одним концом тягой, другой конец которой связан с указанным шарниром.
со Crf
t
N fva
CT
-Сь
cr
(O
o
CO
/
I
O, /
6
ФигЛ
Фае. 5
| Пневматический выключатель | 1984 |
|
SU1243043A1 |
| кя | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
