Изобретение относится к устройствам транспортных средств двойного (гражданского и военного) назначения, выполненных с возможностью транспортировки различных грузов по суше и воде, и может быть использовано для обеспечения переправы техники через водные преграды. Гидравлическая система транспортного средства, как составляющая часть устройства, способствует оптимальному обеспечению водоходных качеств плавающего транспортного средства и его эксплуатационных характеристик и может быть также использована в системе управления других транспортных средств, например судов на воздушной подушке.
Основным требованием, предъявляемым к плавающим транспортным средствам, является обеспечение необходимой грузоподъемности, плавучести и остойчивости при движении на плаву, хороших маневренных качеств как на плаву, так и на суше, а также оперативности проведения погрузочно-разгрузочных работ в условиях неподготовленных переправ.
Известно плавающее транспортное средство, разработанное заявителем, по патенту на изобретение №2201353 с приоритетом от 17.04.2001 г.
Данное плавающее транспортное средство содержит герметичный корпус с палубой, силовую установку, трансмиссию, движительно-рулевой комплекс для движения по суше и по воде. Секционированной конструкцией корпуса обеспечена высокая плавучесть транспортного средства. Использование надежной трансмиссии и гусеничной ходовой части позволяет транспортному средству отвечать высоким требованиям по подвижности и маневренности на суше, специальная защита корпуса и кабины позволяет использовать такое транспортное средство по двойному назначению в военных и мирных целях.
Плавающее транспортное средство оборудовано устройством изменения вектора тяги водоходных движителей, позволяющим регулировать его дифферент на плаву.
Однако такое транспортное средство не в полной мере обладало эффективными средствами обеспечения высокой скорости и маневренности на плаву. Кроме того, в нем отсутствовали устройства, способствующие оперативному выполнению погрузочно-разгрузочных работ.
Известно плавающее транспортное средство ПТС-3 из семейства машин ПТС, принятое за прототип, разработанное в развитие ПТС-2, см., например, статью Жабров В., Степанов А. «Инженерно-переправочные средства», журнал «Техника и вооружение», октябрь 2001 г., стр. 8, с высокими водоходными характеристиками.
Данное плавающее транспортное средство содержит герметичный корпус с палубой, силовую установку, трансмиссию, движительно-рулевой комплекс для движения по суше и по воде, отвечает требованиям двойного назначения по уровню защищенности экипажа и удельной мощности силовой установки.
На нем установлены водоходные движители повышенной эффективности за счет установки гребных винтов в гидравлических насадках и сдвоенные водяные рули, расположенные за корпусами насадков, управляющие поворотом транспортного средства. У каждого водоходного движителя гидравлический насадок связан с корпусом транспортного средства с помощью тяг, жестко связанных с корпусом насадка, и оборудован гидроцилиндром его подъема и опускания путем поворота тяг.
Транспортное средство оборудовано откидным загрузочным бортом. В транспортном положении откидной загрузочный борт соединен специальной стяжкой с бортом корпуса. Для загрузки транспортного средства (на суше) один из членов экипажа разъединяет стяжку бортов, после чего производится опускание откидного загрузочного борта гидроцилиндром, служащим для подъема и опускания насадка, в загрузочное (крайнее нижнее) положение, в котором борт опирается на корпус насадка, в связи с чем при загрузке плавающего транспортного средства переправляемым транспортом нагрузка воспринимается корпусом насадка и передается на грунт. Затем вручную откидываются въездные аппарели, шарнирно закрепленные на загрузочном борту. Перечисленные операции, выполняемые вручную при переводе борта из транспортного положения в загрузочное, также выполняются вручную при переводе загрузочного борта из загрузочного положения в транспортное.
Тем самым, отсутствие автоматизации для установки аппарелей у загрузочного борта и для взаимного стопорения откидного загрузочного борта с бортом корпуса является первым недостатком плавающего транспортного средства.
Второй недостаток предопределен жестким закреплением насадков на тягах. Это приводит к тому, что при загрузке плавающего транспортного средства переправляемым транспортом на неровном грунте могут возникнуть ситуации, когда один из насадков не опирается на грунт, а корпус второго насадка взаимодействует с грунтом только передней кромкой сопловой части. В этом случае при въезде переправляемого транспорта на загрузочный борт, который, как сказано выше, при загрузке опирается на корпуса насадков, сопловая часть корпуса нагруженного насадка может получить пластические деформации, что недопустимо. Одновременно (при возможной разнице расположения насадков по высоте из-за неровностей грунта) возможен перекос и скручивание (пластические деформации) тяг нагруженного насадка относительно шарнирных мест крепления тяг на корпусе, что также недопустимо с позиций безотказной работы транспортного средства.
Описанная здесь ситуация усугубляется тем, что в начальный момент въезда переправляемого транспорта на загрузочный борт плавающего транспортного средства упругие подвески ходовой части плавающего средства, расположенные в зоне кормы, "проседают", дополнительно нагружая тяги и корпуса насадков и создавая неуправляемые (экипажами транспортных средств) условия погрузки. Следует отметить, что для других грузовоспринимающих транспортных средств, например подъемных самоходных кранов, мостоукладчиков или реактивных систем залпового огня, для избежания явления проседания задних подвесок применяются выносные аутригеры, расположенные в кормовой части (см., например, изобретение по патенту №2217679, заявка №2002118403 от 08.07.2002 г.) Подобные аутригеры в плавающем транспортном средстве разместить не представляется возможным по причине установки в данной зоне водоходных движителей и системы их управления.
Тем самым, недостатки известного плавающего транспортного средства заключаются в недостаточно оптимальном техническом решении по установке водоходных движителей на плавающем транспортном средстве, которые, наряду с основной функцией, используются в качестве опорного элемента для загрузочного борта при погрузочно-разгрузочных работах.
Перечисленные недостатки снижают эксплуатационные характеристики плавающего транспортного средства и ограничивают его возможности применения в условиях недостаточно подготовленных переправ.
Известны гидравлические системы гусеничных транспортных средств, например мостоукладчиков, см., например, решение от 05.01.1988 г. о выдаче свидетельства на полезную модель "Гидросистема мостоукладчика" по заявке №96110727 /03 от 29.05.96 г., кл. E 01 D 15/127.
Данная гидросистема содержит насосную станцию, предохранительное разгрузочное устройство, магистральные трубопроводы питания, гидролинии с системой гидроцилиндров, являющихся исполнительными органами для опускания аутригера, установки рычага механизма наводки и раскрытия секций моста. Каждая гидролиния содержит последовательность гидрозамков, установленных попарно на каждый гидроцилиндр с возможностью запирания одним гидрозамком штоковой полости, вторым - поршневой полости гидроцилиндра. Описанная гидросистема является совершенной применительно к мостоукладчику, но, в той же связи, чрезвычайно сложной, а применение большого количества гидрозамков (дорогостоящих и сравнительно громоздких) создает препятствия для использования заложенных в ней технических решений применительно к плавающему транспортному средству. Кроме того, данная гидравлическая система функционально не подходит для применения на плавающем транспортном средстве, где требуется выполнение иных операций.
Известна из упомянутой статьи Жаброва В. и Степанова А. «Инженерно-переправочные средства» гидравлическая система (гидросистема) ПТС-3. Данная гидросистема, исходя из текста и иллюстрационных материалов статьи, содержит насосную станцию, традиционно применяемые в гидросистемах предохранительное разгрузочное устройство и магистральные трубопроводы, а также гидроцилиндр управления положением водоходного движителя для перевода его в транспортное (поджатое к загрузочному борту) или рабочее положение с электроуправлением подачей рабочей жидкости в полости гидроцилиндра через трехпозиционный распределитель. Данная гидросистема принята за прототип для заявляемой гидравлической системы транспортного средства по большинству существенных признаков.
Недостатки гидросистемы - прототипа вытекают, прежде всего, из отсутствия в плавающем транспортном средстве - прототипе ряда режимов работы, в частности автоматизирующих установку аппарелей и взаимное стопорение откидного загрузочного борта с бортом корпуса. В гидросистеме также отсутствуют возможности обеспечения аутригерного режима работы, исключающего "прогиб" подвесок плавающего транспортного средства в процессе погрузки, и возможности изменения ходового дифферента на плаву.
Задачей заявляемых изобретений является повышение эксплуатационных характеристик плавающего транспортного средства и создание гидравлической системы для транспортного средства, обеспечивающей требуемые режимы его работы.
Приведенное ниже решение указанной задачи реализуется двумя изобретениями, связанными единым конструкторским замыслом. Первое изобретение представляет собой плавающее транспортное средство (как целое устройство), второе - гидравлическую систему транспортного средства (как составную часть, которая в целом устройстве используется по требуемому функциональному назначению, как гидросистема управления плавающего транспортного средства, но может быть использована и в других, в том числе необязательно плавающих, объектах, в частности в судах на воздушной подушке с маршевыми винтами, расположенными в насадке, сопле, ином направляющем аппарате).
Указанная задача решается тем, что плавающее транспортное средство, содержащее палубный герметичный корпус с откидным загрузочным бортом, силовую установку, трансмиссию, движительно-рулевой комплекс с водоходными движителями, включающими гребные винты, установленные в гидравлических насадках, и устройство изменения вектора тяги водоходных движителей, снабжено несущей рамой обтекаемой формы для закрепления устройств движительно-рулевого комплекса, установленной в кормовой части корпуса и образованной двумя парами жестких продольных балок, шарнирно закрепленных внутренними концами на кормовом листе корпуса в зоне, расположенной под загрузочным бортом, связанных упругими поперечными балками - в каждой паре и опорным брусом - между парами, а гидравлические насадки шарнирно установлены на внешних концах каждой пары продольных балок и закреплены на них, образуя дополнительную поперечную связь между балками, при этом несущая рама снабжена силовыми гидроцилиндрами, установленными с возможностью подъема и опускания насадков поворотом несущей рамы в шарнирах кормового листа, а корпус каждого гидравлического насадка снабжен верхней роликовой опорой, служащей в качестве опоры качения для откидного загрузочного борта при его открывании, и нижней платформой, служащей в качестве жесткого основания, взаимодействующего с грунтом при опирании откидного загрузочного борта на корпус насадка в загрузочном положении борта.
Решению указанной задачи способствует то, что гидравлическая система транспортного средства, содержащая насосную станцию, предохранительное разгрузочное устройство, магистральные трубопроводы питания и гидроцилиндры управления положением насадков движителей, закрепленных на несущей раме транспортного средства, дополнительно оборудована гидроцилиндрами установки аппарелей, изменения вектора тяги, фиксации загрузочного борта и стопорения несущей рамы, причем питание каждого из гидроцилиндров выполнено в виде параллельных, связанных с основной магистралью гидравлических линий с электроуправлением в каждой гидравлической линии, при этом в гидравлической линии питания гидроцилиндров управления положением насадков движителей установлены гидрозамок с возможностью запирания полостей гидроцилиндров, воспринимающих усилия вывешивания кормовой части транспортного средства на несущей раме и весовые и инерционные нагрузки загружаемой техники, дроссель с обратным клапаном с возможностью исключения режима автоколебаний в данной гидравлической линии при открывании гидрозамка и двухпозиционный распределитель с возможностью обеспечения при подаче управляющего сигнала режима свободного перепуска рабочей жидкости между полостями гидроцилиндров, в гидравлической линии изменения вектора тяги тоже установлен двухпозиционный распределитель с возможностью обеспечения при подаче управляющего сигнала режима свободного перепуска рабочей жидкости между полостями гидроцилиндра изменения вектора тяги, а в гидравлической линии установки аппарелей установлен дроссель с обратным клапаном с возможностью обеспечения плавного изменения скорости выдвижения штока гидроцилиндра при установке и складывании аппарелей.
Для достижения лучшего эксплуатационного эффекта в плавающем транспортном средстве в соответствии с поставленной задачей:
устройство изменения вектора тяги выполнено в виде поперечного вала, связанного с корпусами гидравлических насадков с возможностью их поворота рычажным механизмом, оборудованным гидроцилиндром изменения вектора тяги, установленным на кронштейне опорного бруса несущей рамы;
поперечный вал устройства изменения вектора тяги снабжен компенсационными муфтами, например карданного типа;
откидной загрузочный борт выполнен в виде каркасного, герметично обшитого металлическими листами основания, размещенного в транспортном положении в продолжение кормового листа корпуса, оборудованного стенками, закрепленными с обеих его сторон в продолжение бортов корпуса и снабженного въездными аппарелями, шарнирно связанными с основанием и двуплечим рычагом с приводом от гидроцилиндров, установленных на боковых поверхностях каркаса основания с возможностью развертывания аппарелей из транспортного в рабочее положение;
откидной загрузочный борт снабжен гидравлическим механизмом его фиксации в транспортном положении, а упомянутые стенки и основание оборудованы герметизирующим уплотнением, расположенным по периметру стыковочной зоны корпуса и загрузочного борта;
герметизирующее уплотнение выполнено в виде резинового полосовидного вкладыша, размещенного в стыковочной балке корпуса транспортного средства с возможностью взаимодействия с уплотняющим выступом стыковочной балки откидного загрузочного борта;
гидравлический механизм фиксации загрузочного борта выполнен в виде планки, закрепленной по верху стенки откидного загрузочного борта с перекрытием стенки борта корпуса транспортного средства, снабженной отверстием в выступающей ее части, для взаимодействия со штоком фиксатора, управляемым гидроцилиндром, размещенным в борту корпуса транспортного средства;
плавающее транспортное средство снабжено гидравлическим механизмом стопорения несущей рамы на откидном загрузочном борту для обеспечения возможности движения по суше и датчиком-сигнализатором положения стопора механизма фиксации;
боковые стенки каркаса основания образованы швеллерными балками, а гидроцилиндры и двуплечие рычаги развертывания аппарелей установлены в полостях между полками упомянутых швеллерных балок.
Анализ отличительных признаков плавающего транспортного средства показал, что:
- снабжение плавающего транспортного средства несущей рамой обтекаемой формы для закрепления устройств движительно-рулевого комплекса, установленной в кормовой части корпуса и образованной двумя парами жестких продольных балок, шарнирно закрепленных внутренними концами на кормовом листе корпуса в зоне, расположенной под загрузочным бортом, связанных упругими поперечными балками - в каждой паре и опорным брусом - между парами, а так же установка гидравлических насадков шарнирно на внешних концах каждой пары продольных балок и закрепление на них с образованием дополнительной поперечной связи между балками, позволяет избежать, даже при недостаточно подготовленных переправах, пластических деформаций в элементах рамы, соединяющей корпуса гидравлических насадков с корпусом транспортного средства.
- снабжение несущей рамы силовыми гидроцилиндрами, установленными с возможностью подъема и опускания насадков поворотом несущей рамы в шарнирах кормового листа, обеспечивает одинаковое положение гидравлических насадков относительно корпуса на плаву и в транспортном положении и синхронное изменение их положения относительно корпуса;
- снабжение корпусов каждого гидравлического насадка верхней роликовой опорой, служащей в качестве опоры качения для откидного загрузочного борта при его открывании, направлено на уменьшение трения корпуса гидравлического насадка о загрузочный борт в процессе перевода загрузочного борта из транспортного положения в загрузочное, и наоборот;
- снабжение корпусов каждого гидравлического насадка нижней платформой, служащей в качестве жесткого основания, взаимодействующего с грунтом при опирании откидного загрузочного борта на корпус насадка в загрузочном положении борта, распределяет напряжения при загрузке транспортного средства по корпусу насадка и позволяет избежать деформаций корпуса, в том числе сопловой его части;
- выполнение устройства изменения вектора тяги в виде поперечного вала, связанного с корпусами гидравлических насадков с возможностью их поворота рычажным механизмом, оборудованным гидроцилиндром изменения вектора тяги, установленным на кронштейне опорного бруса несущей рамы, позволяет с помощью одного гидроцилиндра синхронно изменять положение вектора тяги обоих водоходных движителей;
- снабжение поперечного вала устройства изменения вектора тяги компенсационными муфтами, например карданного типа, позволяет обеспечить угловую компенсацию по длине поперечного вала в устройстве изменения вектора тяги при наличии упругих деформаций в раме;
- выполнение откидного загрузочного борта в виде каркасного, герметично обшитого металлическими листами основания, размещенного в транспортном положении в продолжение кормового листа корпуса, оборудованного стенками, закрепленными с обеих его сторон в продолжение бортов корпуса и снабженного въездными аппарелями, шарнирно связанными с основанием и двуплечим рычагом с приводом от гидроцилиндров, установленных на боковых поверхностях каркаса основания с возможностью развертывания аппарелей из транспортного в рабочее положение, способствует автоматизации работ по переводу плавающего транспортного средства из загрузочного положения в транспортное, и наоборот; этому же способствует снабжение откидного загрузочного борта гидравлическим механизмом его фиксации в транспортном положении; этому же способствует выполнение гидравлического механизма фиксации загрузочного борта в виде планки, закрепленной по верху стенки откидного загрузочного борта с перекрытием стенки борта корпуса транспортного средства, снабженной отверстием в выступающей ее части, для взаимодействия со штоком фиксатора, управляемого гидроцилиндром стопорения загрузочного борта, размещенного в борту корпуса транспортного средства; этому же способствует снабжение транспортного средства датчиками-сигнализаторами положения стопоров механизмов фиксации;
- оборудование корпуса и загрузочного борта герметизирующим уплотнением, расположенным по периметру стыковочной зоны, выполненным в виде, например, резинового полосовидного вкладыша, размещенного в стыковочной балке корпуса транспортного средства с возможностью взаимодействия с уплотняющим выступом стыковочной балки откидного загрузочного борта, обеспечивает плотность и герметичность грузового отсека плавающего транспортного средства;
- установка гидравлического механизма стопорения несущей рамы на откидном загрузочном борту обеспечивает стопорение несущей рамы на откидном загрузочном борту для движения транспортного средства на суше;
- выполнение боковых стенок каркаса основания в виде швеллерных балок и установка гидроцилиндров и двуплечих рычагов развертывания аппарелей в полостях между полками упомянутых балок способствует защите двуплечих рычагов и гидроцилиндров от эксплуатационных повреждений.
Анализ отличительных признаков гидравлической системы транспортного средства показал, что введение в нее гидроцилиндров установки аппарелей, изменения вектора тяги, фиксации загрузочного борта и стопорения несущей рамы с выполнением питания каждого из гидроцилиндров в виде параллельных, связанных с основной магистралью гидравлических линий с электроуправлением в каждой гидравлической линии обеспечивает транспортному средству, в том числе плавающему, взаимно независимую автоматизацию установки аппарелей, фиксацию и расстопаривание загрузочного борта с бортом корпуса и несущей рамы с загрузочным бортом, а также изменение ходового дифферента;
- установка гидрозамков в гидравлической лини питания гидроцилиндров управления положением насадков водоходных движителей для плавающего транспортного средства (или движителей, использующих энергию воздушной струи, - для судна на воздушной подушке) с возможностью запирания полостей гидроцилиндров, воспринимающих усилия вывешивания кормовой части транспортного средства на несущей раме и весовые и инерционные нагрузки загружаемой техники, позволяет обеспечить стабилизацию положения корпуса транспортного средства в процессе загрузки за счет практически полного запирания полостей гидроцилиндров, воспринимающих усилия вывешивания;
- установка дросселя с обратным клапаном в гидравлической линии питания гидроцилиндров управления положением насадков обеспечивает исключение режима автоколебаний в данной гидравлической линии при открывании гидрозамка;
- установка двухпозиционного распределителя в гидравлической линии питания гидроцилиндров управления положением насадков обеспечивает при подаче управляющего сигнала режим свободного перепуска рабочей жидкости между полостями гидроцилиндров, необходимый для предохранения гидравлического насадка, в частности при загрузке транспортного средства;
- установка двухпозиционного распределителя в гидравлической линии питания гидроцилиндров, установленных для изменения вектора тяги, обеспечивает возможность обеспечения при подаче управляющего сигнала режим свободного перепуска рабочей жидкости между полостями гидроцилиндра изменения вектора тяги, что позволяет гидравлическому насадку при перегрузках в процессе проведения погрузочно- разгрузочных работ автоматически занимать на грунте положение, при котором обеспечивается опора корпуса насадка на всю площадь опорной платформы;
- установка дросселя с обратным клапаном в гидравлической линии установки аппарелей обеспечивает возможность плавного изменения скорости выдвижения штока гидроцилиндра при установке аппарелей, тем самым обеспечивая безударную их установку.
Необходимо отметить, что, наряду с соответствием заявляемых технических решений требованию "изобретательский уровень", подтвержденному анализом, заявленные изобретения соответствуют патентоспособности и по требованию "единство изобретательского замысла". Действительно, как будет показано в примере выполнения и работы заявляемых устройств, для обеспечения автоматизированной безотказной работы предложенного плавающего транспортного средства, включая особенности эксплуатации на плаву, в условиях загрузки - разгрузки, а так же в условиях движения по суше, не может быть использована ни одна из известных гидравлических систем, кроме предложенной.
Сущность изобретения поясняется чертежами, где в качестве примера выполнения показано:
- на фиг.1 - вид сбоку на плавающее транспортное средство;
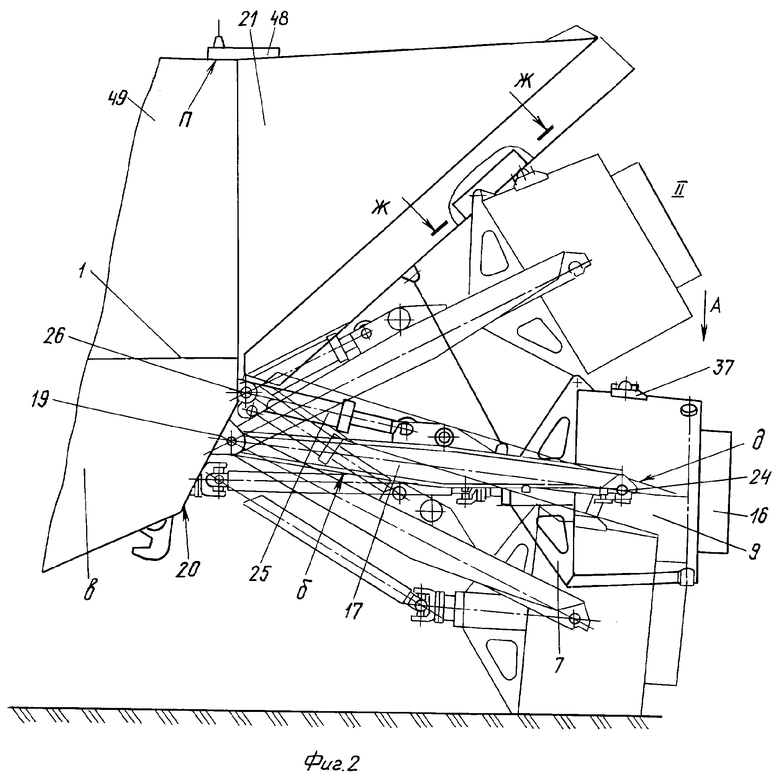
- на фиг.2 - вид сбоку на кормовую часть плавающего транспортного средства, где показаны следующие положения водоходных движителей: I -водоходное положение, II - транспортное положение, III - загрузочное положение;
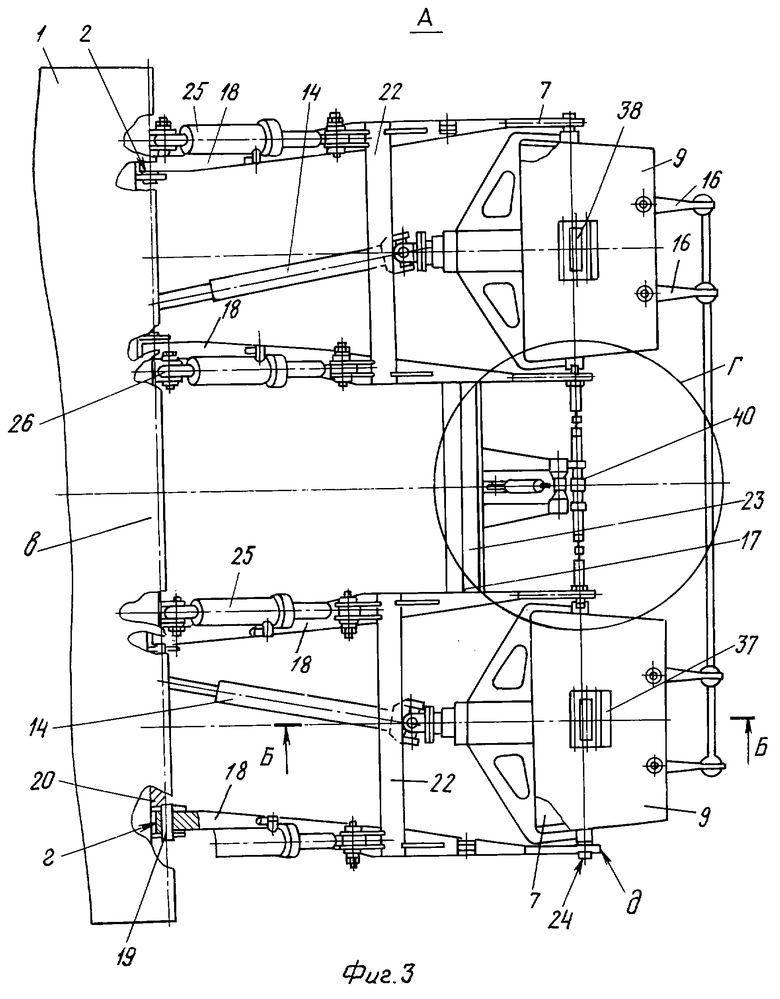
- на фиг.3 - вид сверху на кормовую часть плавающего транспортного средства (вид А на фиг.2);
- на фиг.4 - вид на водоходный движитель (разрез по Б - Б на фиг.3);
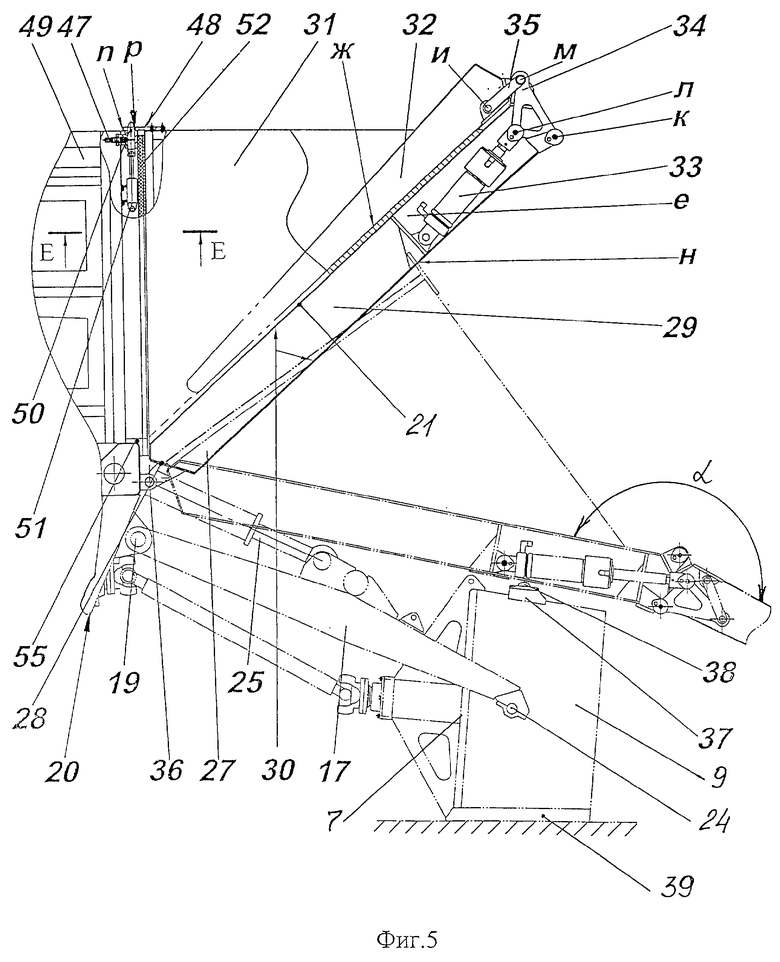
- на фиг.5 - вид на закрытый загрузочный борт плавающего транспортного средства, штрихпунктирной линией показано положение борта в состоянии, подготовленном для загрузки плавающего транспортного средства;
- на фиг.6 - вид на водоходный движитель (вид В на фиг.4);
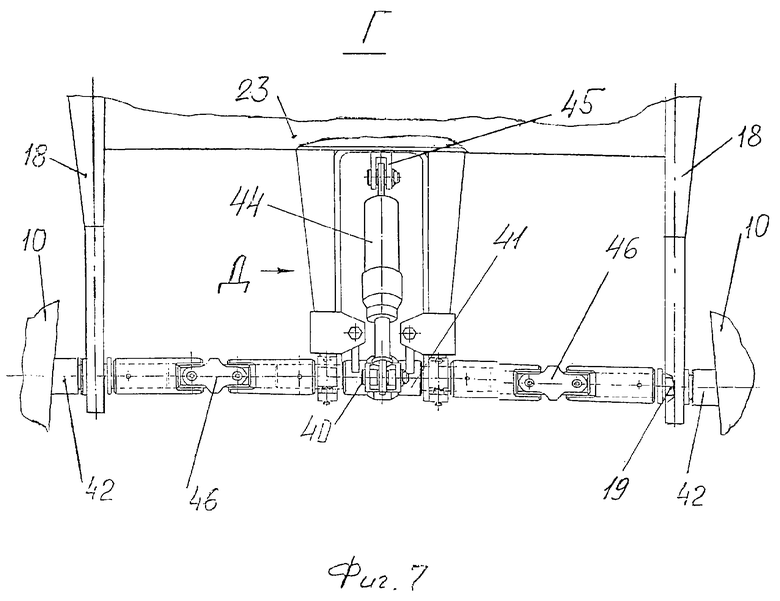
- на фиг.7 - вид на привод устройства изменения вектора тяги (вид Г на фиг.3);
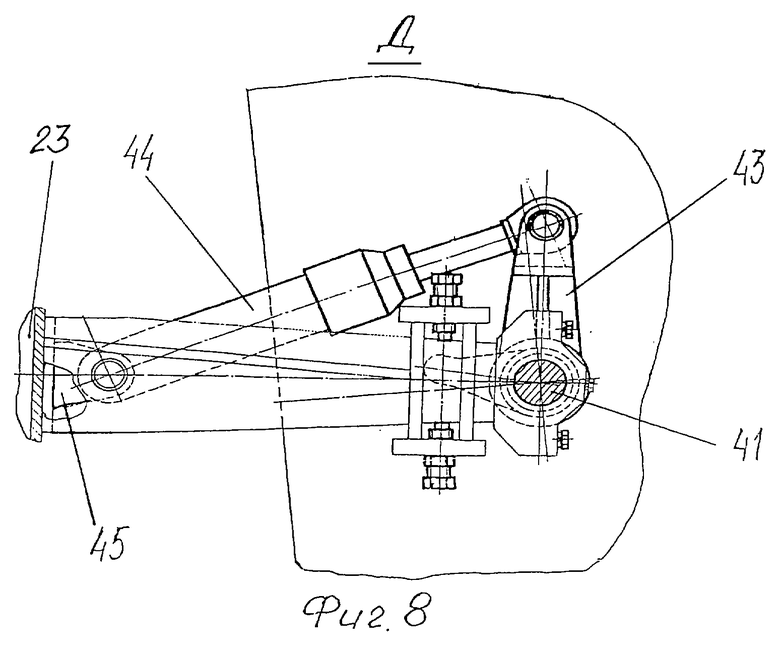
- на фиг.8 - вид сбоку на привод устройства изменения вектора тяги (вид Д на фиг.7);
- на фиг.9 - разрез по герметизирующему уплотнению по периметру стыковочной зоны (разрез по Е-Е на фиг.5);
- на фиг.10 - гидравлический механизм стопорения (разрез Ж -Ж на фиг.2);
- на фиг.11 - принципиальная схема гидравлической системы.
Плавающее транспортное средство содержит герметичный корпус 1 (см. фиг.1-3) с палубой 2, являющейся по сути грузовой платформой, силовую установку 3, трансмиссию 4, движительно-рулевой комплекс 5, включая гусеничный движитель 6 - для движения по суше и водоходные движители 7 - для движения по воде.
Каждый водоходный движитель (см. также фиг.4) включает гребной винт 8, установленный в гидравлическом насадке 9, состоящем из тонкостенного оболочкового корпуса 10 с профилированной внутренней поверхностью «а», соплом 11, опорой 12 гребного винта 8 и ребрами жесткости 13. Передача крутящего момента от трансмиссии 4 на гребные винты 8 осуществляется карданными валами 14 через валы 15 опор 12. В состав движительно-рулевого комплекса 5 входят сдвоенные водяные рули 16 перьевого типа, расположенные за корпусами насадков 9, регулирующие направление истечения воды из насадков и тем самым управляющие поворотом транспортного средства.
Каждый водоходный движитель 7 связан с корпусом 1 транспортного средства с помощью несущей рамы 17, элементы которой выполнены с обтекаемыми поверхностями «б» со стороны набегающего при движении транспортного средства вперед водяного потока. Рама 17 фактически представляет собой жесткий в продольном направлении и сравнительно податливый в поперечном направлении элемент, служащий для закрепления устройств движительно-рулевого комплекса. Рама 17 установлена в кормовой части «в» корпуса 1 и образована двумя парами жестких продольных балок 18, закрепленных с помощью шарнирных узлов 19 внутренними своими концами «г» на кормовом листе 20 корпуса 1 в зоне, расположенной под загрузочным бортом 21. Продольные балки 18 связаны упругими поперечными балками 22 - в каждой паре и опорным брусом 23 - между парами. На внешних концах «д» каждой пары продольных балок 18 шарнирно установлены и закреплены упомянутые корпуса 10 гидравлических насадков 9 с возможность углового разворота в шарнире 24. Тем самым на внешних концах «д» каждой пары продольных балок 18 образована дополнительная поперечная связь между балками, придающая каждой паре продольных балок 18 дополнительную жесткость от скручивания.
Несущая рама 17 снабжена силовыми гидроцилиндрами 25, закрепленными одним концом на кормовом листе 20 с помощью шарниров 26. Другим концом каждый гидроцилиндр 25 шарнирно связан с несущей рамой 17 в зоне, где стыкуется пара продольных балок 18 с поперечной балкой 22. Тем самым поворотом рамы в шарнирах кормового листа с помощью гидроцилиндров 25 обеспечена возможность подъема или опускания водоходных движителей 7 и установка их в транспортное положение, когда водоходные движители поджимаются к загрузочному борту 21 (положение II на фиг.2) в его транспортном положении, либо в заданное рабочее положение, обеспечивающее движение плавающего транспортного средства на воде (положение I на фиг.2), либо в загрузочное положение (положение III на фиг.2), когда корпуса водоходных движителей укладываются на грунт, о чем будет сказано ниже. Следует отметить, что кинематическая схема установки гидроцилиндра 25 организована таким образом, что при "сжатии" гидроцилиндра 25 обеспечивается подъем несущей рамы 17 поворотом и, наоборот, при "раскрытии" гидроцилиндра 25 обеспечивается опускание несущей рамы 17. Поскольку гидроцилиндр 25, как будет показано в описании, имеет и другие функции, то, в целях соблюдения единства терминологии, он будет далее именоваться как гидроцилиндр управления положением насадка (водоходного) движителя.
Откидной загрузочный борт 21 (см. также фиг.5) содержит основание 27, располагающееся в транспортном положении в продолжение кормового листа 20 корпуса 1. Основание 27 состоит из каркаса 28, боковины которого образованы швеллерными балками 29, установленными полками 30 швеллеров наружу с образованием открытых с внешней стороны полостей «е».
Каркас 28 основания герметично обшит металлическими листами, при этом верхняя часть обшивки «ж» основания (настильная часть «ж») выполнена профильной для лучшего взаимодействия с шинами колес или гусеницами загружаемых на плавающее транспортное средство машин. С основанием 27 связаны стенки 31 откидного загрузочного борта, жестко, герметично закрепленные с обеих его сторон в продолжение бортов корпуса. У стенок 31 установлены въездные аппарели 32, шарнирно связанные с основанием с возможностью установки (путем разворота) из транспортного положения в рабочее. Для разворота аппарелей 32 в упомянутых полостях «е» каркаса установлены гидроцилиндры 33, снабженные каждый двуплечим рычагом 34 с толкателем 35. Установка и размещение шарниров «и», «к», «л», «м» и узлов механизма, образованного гидроцилиндром 33, рычагом 34 и толкателем 35, выбрана таким образом, что при выдвижении штока гидроцилиндра достигается разворот аппарели 32 на угол α, величина которого установлена не менее 230°.
Для перевода откидного загрузочного борта в транспортное или загрузочное положения, который осуществляется поворотом откидного загрузочного борта в шарнире 36, используется ранее упомянутый силовой гидроцилиндр 25 управления положением насадка движителя. В процессе такого перевода верхняя часть корпуса 10 гидравлического насадка 9 находится во взаимодействии с нижней стороной «н» обшивки каркаса 28 основания 27 загрузочного борта, воспринимая вес борта.
Поскольку из компоновочных возможностей разместить оси шарниров шарнирных узлов 19 крепления балок 18 несущей рамы и шарниров 36 крепления откидного загрузочного борта на одной общей оси не представляется возможным, то при открывании (закрывании) откидного загрузочного борта происходит перемещение корпуса гидравлического насадка 9 относительно нижней стороны «н» обшивки каркаса 28, сопровождающееся трением скольжения. Для исключения вибраций и износовых процессов, сопровождающих трение скольжения, корпуса 10 гидравлических насадков снабжены верхней роликовой опорой 37 с роликом 38, служащей в качестве опоры качения для откидного загрузочного борта. Тем самым трение скольжения заменяется на трение качения, снижая отрицательные последствия взаимного перемещения загрузочного борта и гидравлического насадка. В нижней части корпуса 10 гидравлического насадка выполнена платформа 39, см. фиг.6, (именуемая также как опорная платформа), служащая в качестве жесткого основания, взаимодействующего с грунтом при опирании откидного загрузочного борта на корпус 10 гидравлического насадка 9 в загрузочном положении борта.
Плавающее транспортное средство снабжено устройством 40 (см. фиг.7, 8) изменения вектора тяги, служащим для изменения ходового дифферента транспортного средства. Устройство 40 выполнено в виде поперечного вала 41, связанного с осями 42, закрепленными на корпусах 10 гидравлических насадков 9. Оси 42 установлены в вышеупомянутых шарнирах 24 с возможностью их поворота в вертикальной плоскости (а следовательно, поворота гидравлического насадка 9) рычагом 43, установленным по центру поперечного вала 41. Привод рычага 43 выполнен в виде гидроцилиндра 44, установленного на кронштейне 45 опорного бруса 23 несущей рамы 17.
Для компенсации упругих эксплуатационных деформаций поперечный вал 41 снабжен компенсационными муфтами 46, например, карданного типа.
Загрузочный борт 21 снабжен гидравлическим механизмом его фиксации 47 в транспортном положении, выполненным в виде планки 48, закрепленной по верху стенки 31 откидного загрузочного борта с перекрытием поверху стенки 49 борта корпуса транспортного средства, в выступающей (за пределы откидного загрузочного борта) части «п» которой выполнено отверстие «р» для взаимодействия со стопором 50 фиксатора, управляемого гидроцилиндром 51 стопорения загрузочного борта, размещенного в стенке 49 борта корпуса транспортного средства. По периметру зоны корпуса 1, стыкуемой с загрузочным бортом, установлено герметизирующее уплотнение 52 (см фиг.5 и 9). Уплотнение 52 выполнено в виде резинового полосовидного вкладыша 53, размещенного в балке 54 стенок 49 корпуса транспортного средства и в балке 55 палубы (грузовой платформы) 2 с возможностью взаимодействия с уплотняющим выступом 56 стыковочной балки 57 откидного загрузочного борта.
Для исключения инерционных перегрузок на несущей раме 17 при движении транспортного плавающего средства по суше, в особенности в условиях бездорожья, плавающее транспортное средство снабжено гидравлическим механизмом стопорения 58 (см. фиг.10) несущей рамы 17 на откидном загрузочном борту с гидроцилиндром 59, фиксатором 60, а так же датчиком-сигнализатором 61 положения фиксатора 60.
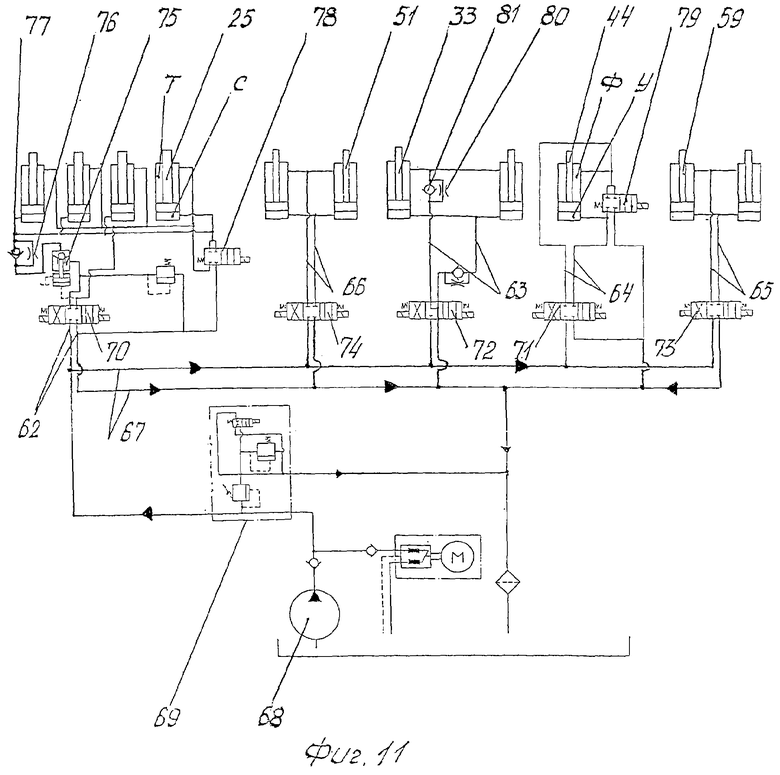
Гидросистема транспортного средства, см. также фиг.11, состоит из уже упомянутых гидроцилиндров 25 - управлением положением насадка движителя, 33 - установки аппарелей, 44 - изменения изменения вектора тяги (изменения ходового дифферента транспортного средства), 51 - стопорения загрузочного борта и 59 - стопорения несущей рамы на откидном загрузочном борту, параллельно запитанных с помощью соответствующих гидравлических линий 62-66, связанных с магистральными трубопроводами 67. Напор в магистральных трубопроводах 67 обеспечивается насосной станцией 68. От перегрузок гидросистема защищена предохранительным разгрузочным устройством 69
Подключение каждой гидравлической линии в работу ведется из кабины механика водителя плавающего транспортного средства электроуправлением с использованием трехпозиционных гидрораспределителей 70-74. В гидравлической лини 62 управления положением насадка движителя (гидравлической лини питания гидроцилиндров 25) установлены гидрозамок 75 с возможностью запирания полостей "с" гидроцилиндров 25, воспринимающих усилия вывешивания кормовой части транспортного средства на несущей раме и весовые и инерционные нагрузки загружаемой техники, дроссель 76 с обратным клапаном 77. Наличие дросселя 76 и обратного клапана 77 в данной линии исключает возможность возникновения режима автоколебаний в гидравлической линии 62 при открывании гидрозамка 75. В гидравлической линии 62 также установлен двухпозиционный распределитель 78 с возможностью обеспечения при подаче управляющего сигнала режима свободного перепуска рабочей жидкости между полостями "с" и "т" гидроцилиндров 25. В гидравлической линии 64 изменения вектора тяги установлен двухпозиционный распределитель 79 с возможностью обеспечения при подаче управляющего сигнала режима свободного перепуска рабочей жидкости между полостями "у" и "ф" гидроцилиндра 44 изменения вектора тяги, а в гидравлической линии 63 установки аппарелей установлены дроссели 80 с обратным клапаном 81, обеспечивающие возможность плавного изменения скорости выдвижения штока гидроцилиндра 44 при установке аппарелей 32.
Работа плавающего транспортного средства.
При описании работы плавающего транспортного средства режимы работы гидравлической системы транспортного средства рассмотрены в качестве примера применительно только к плавающему средству, поскольку принципиально не отличаются, например, для судна на воздушной подушке, у которого, как отличительное свойство, рабочей средой для маршевых движителей вместо воды является воздух. При этом в работе гидравлической системы описаны только принципиальные моменты, необходимые для понимания ее работы.
а) Режим движения по суше и подготовка к нему.
Движение плавающего транспортного средства (загруженного или порожнего) по суше осуществляется с использованием гусеничного движителя 6, мощность на который передается от силовой установки 3 через трансмиссию 4.
Для движения по суше загрузочный борт 21 предварительно развернут вверх в шарнирах 24 подачей рабочей жидкости в полости "с" силовых гидроцилиндров 25 управления положением насадка движителя и поджат через несущую раму 17, корпуса 10 насадков и ролики 38 роликовых опор 37 к корпусу 1 по периметру зоны стыка. При этом гидрораспределитель 70 в гидравлической линии 62 обеспечивает подачу рабочей жидкости через магистральные трубопроводы 67 в полости "с" и слив ее из полостей "т" гидроцилиндров 25. После этого загрузочный борт 21 стопорится на корпусе 1 с помощью механизма 47 фиксации загрузочного борта в транспортном положении. При стопорении включается гидрораспределитель 74, запитывая напорную магистраль гидролинии 66, выдвигая шток гидроцилиндра 51, который заводит стопор 50 фиксатора в отверстие «р» планки 48, обеспечивая удержание загрузочного борта 21 в закрытом положении. После фиксации гидрораспределитель 74 переключается в состояние запирания гидроцилиндра 51.
После закрытия и установки на стопор загрузочного борта в свою очередь стопорится несущая рама 17 на загрузочном борту гидравлическим механизмом 58 стопорения. При этом через гидрораспределитель 73 в гидравлическую линию 65 подается рабочая жидкость, гидроцилиндры 59 срабатывают, стопоря фиксатором 60 несущую раму на загрузочном борту. После выполнения операции стопорения на пульт управления с датчика 61 подается сигнал о факте стопорения, что означает готовность плавающего транспортного средства к движению. Далее при движении транспортного средства, например, по неровностям пересеченной местности инерционные нагрузки, действующие на водоходные движители 7, замыкаются на загрузочном борту, не вызывая в несущей раме значительных напряжений.
б) Подготовка к загрузке.
Подготовка к загрузке плавающего транспортного средства, например, переправляемой техникой происходит в обратном порядке с описанным режимом подготовки к движению. Сначала гидравлическим механизмом 58 несущая рама 17 выводится из застопоренного состояния, для чего гидрораспределители 74 устанавливаются в положение слива, меняя направление подачи рабочей жидкости в рабочие полости гидроцилиндров 59, при этом фиксатор 60 отсоединяется от загрузочного борта 21, а корпуса 10 гидравлических насадков 9 получают возможность перемещения относительно нижней стороны «н» обшивки каркаса 28 загрузочного борта 21. Затем стопор 50 фиксатора выводится из отверстия «р» планки 48 гидроцилиндром 51 фиксатора, разъединяя загрузочный борт 21 и корпус 1. В то же время, поскольку через несущую раму 17 корпуса 10 гидравлических насадков 9 по-прежнему остаются поджатыми силовым гидроцилиндром 25 к загрузочному борту 21, данный борт не имеет возможности движения. И только после подачи управляющего сигнала на гидрораспределитель 70 гидролинии 62 с обеспечением слива рабочей жидкости из полости "с" гидроцилиндра 25 и нагнетания ее в полость "т" осуществляется по заданному закону (с заданной скоростью) ход штока («раскрытие» гидроцилиндра), в связи с чем загрузочный борт 21 начнет открываться, поворачиваясь в шарнире 36. При этом нижняя сторона «н» обшивки каркаса 28 загрузочного борта 21 перекатывается по ролику 38 роликовой опоры 37. Поворот загрузочного борта 21 будет продолжаться до тех пор, пока корпус 10 насадка 9 своей опорной платформой 39 не обопрется на грунт. Следует отметить, что наличие шарниров 24 в конструкции корпусов 10 насадков позволяет в случае наличия неровностей или посторонних предметов, например камней, под опорной платформой 39 довернуться корпусу 10 относительно оси шарнира 24 с обеспечением устойчивого взаимодействия с грунтом.
После опирания несущей платформы 39 на грунт и раскрытия загрузочного борта 21 производится установка аппарелей 32 с включением в работу гидрораспределителем 72 гидролинии 63. При этом шток гидроцилиндра 33 выдвигается и, воздействуя через шарнир «л» на двуплечий рычаг 34, заставляет его поворачиваться в шарнире «и» и через толкатель 35, в данный момент выполняющий по отношению к аппарели 32 роль тяги, производить разворот аппарели в шарнире «к». Выдвижение штока гидроцилиндра будет продолжаться до тех пор, пока аппарель 32 полностью не развернется в шарнире «к» и свободным концом не обопрется на грунт, обеспечивая возможность въезда на загрузочный борт 21 и далее на палубу 2 переправляемой техники. Обеспечение плавной (с заданной скоростью) установки аппарелей 32 способствует установка в гидролинии 63 дросселя 80 с обратным клапаном 81.
После установки аппарелей 32 при необходимости загрузки на палубу переправляемой тяжелой техники, во избежание "проседания" задних подвесок загружаемого плавающего транспортного средства, гидроцилиндры 25 и несущая рама 17 переводятся в аутригерный режим работы. С этой целью в работу вновь включается гидравлическая линия 62, рабочая жидкость как и при открытии загрузочного борта дополнительно нагнетается в полости "т" гидроцилиндров 25, кормовая часть плавающего транспортного средства отжимается от грунта гидроцилиндрами 25 через опорную платформу 39 корпуса насадка 10 водоходного движителя 7 и вывешивается на раме 17. После этого полости "т" гидроцилиндров 25, воспринимающие наиболее значительные давления при погрузке, запираются на гидрозамок 75, исключая вероятность перетечек и тем самым обеспечивая безопасный режим загрузки. Для исключения линейного (неполного) контакта опорной платформы 39 предусмотрена возможность поворота корпуса насадка 10 в шарнирах 24. Для этого полости "ф" и "у" гидроцилиндра 44 в гидравлической линии 64 гидравлически соединяются с использованием двухпозиционного распределителя 79. После загрузки плавающее транспортное средство и его устройства выводятся из аутригерного режима работы отпиранием гидрозамка и нагнетанием рабочей жидкости в полости "с" гидроцилиндров 25, при этом наличие дросселя 76 с обратным клапаном 77 при снятии высокого (запертого) давления в гидрозамке 75 исключает возможность возникновения режима автоколебаний в гидравлической линии 62.
в) Подготовка плавающего транспортного средства к движению на плаву заключается в выполнени в обратном порядке перечисленных выше операций по убиранию аппарелей, закрытию загрузочного борта и его стопорению. При этом несущая рама 17 на загрузочном борту гидравлическим механизмом 58 не стопорится.
г) Движение плавающего транспортного средства по воде.
После подготовки плавающего транспортного средства к движению на плаву и входа его с использованием гусеничного движителя 6 в воду до достижения плавающего состояния вновь включается в работу гидравлическая линия 62, электроуправляемый двухпозиционный распределитель 78 включается в режим свободного опускания несущей рамы. В этом режиме рама 17 опускается под собственным весом и весом водоходных движителей 7, занимая плавающее положение без силового воздействия гидроцилиндров 25. Для этого полости "с" и "т" гидроцилиндров 25 соединяются распределителем 78 между собой и сливной линией гидравлической линии 62.
Движение плавающего транспортного средства (загруженного или порожнего) на плаву осуществляется с использованием водоходных движителей 7, мощность на гребные винты 8 которых передается от силовой установки 3 через трансмиссию 4 и карданные валы 14.
Плавный поворот плавающего транспортного средства осуществляется разворотом рулей 16 (механизм разворота на фиг. не показан). Для разворота плавающего транспортного средства в ограниченных условиях применяется изменение направления вращения одного из гребных винтов водоходного движителя (реверс тяги).
Для обеспечения оптимального дифферента при движении на плаву, в особенности, если центр масс загруженного транспортного средства имеет значительное смещение от расчетного, применяется разворот водоходного движителя 7 в шарнирах 24, обеспечивая появление вертикальной составляющей вектора тяги. Такой разворот осуществляется поворотом поперечного вала 41 через рычаг 43 гидроцилиндром 44, размещенным в гидравлической линии 64. При развороте водоходного движителя 7 соплом 11 в сторону донной части водного препятствия дифферент транспортного средства на нос увеличивается, а при развороте водоходного движителя соплом 11 в сторону водной поверхности дифферент на нос уменьшается.
Таким образом, в полном соответствии с поставленной задачей, предлагаемыми изобретениями обеспечено повышение эксплуатационных характеристик плавающего транспортного средства и создана гидравлическая система, позволяющая реализовать требуемые режимы работы транспортного средства применительно к условиям его эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2001 |
|
RU2201353C2 |
| ДЕСАНТНЫЙ ТАНКОВЫЙ ПАРОМ | 2005 |
|
RU2296079C1 |
| МЕХАНИЗМ ПОДВИЖНОГО КРЕПЛЕНИЯ ВИНТА В НАСАДКЕ АМФИБИЙНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2341406C1 |
| ДЕСАНТНЫЙ ТАНКОВЫЙ ПАРОМ | 2005 |
|
RU2296078C1 |
| ДЕСАНТНЫЙ ТАНКОВЫЙ ПАРОМ | 2005 |
|
RU2296080C1 |
| ПРИВОД УПРАВЛЕНИЯ ПОВОРОТОМ ПЛАВАЮЩЕГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2255005C2 |
| ПЛАВАЮЩИЙ ТРАНСПОРТЕР | 2002 |
|
RU2237582C2 |
| ЛОПАСТНЫЙ ВОДОХОДНЫЙ ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2742846C1 |
| МОТОРНОЕ ЗВЕНО | 2005 |
|
RU2298507C1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2007 |
|
RU2404400C2 |




Изобретение относится к плавающим транспортным средствам (ПТС) и может использоваться для создания аппарельного и движительно-рулевого устройств, а также их гидросистем. Новым в ПТС является то, что оно снабжено несущей рамой обтекаемой формы для закрепления устройств движительно-рулевого комплекса, установленной в кормовой части корпуса и образованной двумя парами жестких продольных балок (ПБ), шарнирно закрепленных внутренними концами на кормовом листе корпуса в зоне, расположенной под загрузочным бортом (ЗБ), связанных упругими поперечными балками - в каждой паре и опорным брусом - между парами. Гидравлические насадки движителей шарнирно установлены на внешних концах каждой пары ПБ и закреплены на них, образуя дополнительную поперечную связь между ПБ. Несущая рама снабжена силовыми гидроцилиндрами, связанными с гидросистемой, установленными с возможностью управления положением насадков и ЗБ путем поворота несущей рамы в шарнирах кормового листа. Корпус каждого насадка снабжен верхней роликовой опорой, являющейся опорой качения для откидного ЗБ при его открывании, и нижней платформой, являющейся жёстким основанием, взаимодействующим с грунтом при опирании откидного ЗБ на корпус насадка в загрузочном положении ЗБ. Новым в гидросистеме ПТС является то, что наряду с гидроцилиндрами управления положением движителей она дополнительно оборудована гидроцилиндрами установки аппарелей, изменения вектора тяги, фиксации ЗБ и стопорения несущей рамы, причем питание каждого из гидроцилиндров, включая гидроцилиндры управления положением движителей, выполнено в виде параллельных, связанных с основной магистралью гидравлических линий с электроуправлением в каждой линии. Описаны конструктивные особенности каждой линии, обеспечивающие ПТС необходимые режимы работы. Технический результат реализации изобретения заключается в повышении эксплуатационных характеристик ПТС и в создании гидросистемы, обеспечивающей требуемые режимы работы ПТС. 2 н. и 7 з.п. ф-лы, 11 ил.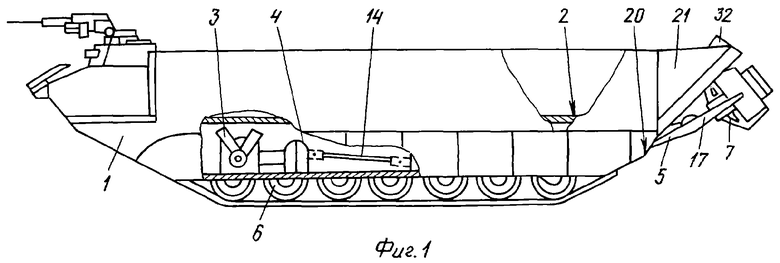
| ПЛАВАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2001 |
|
RU2201353C2 |
| US 4953492 А, 04.11.1990 | |||
| WO 00/74960 A1, 14.12.2000. | |||

