Изобретение относится к приборостроению, предназначено для поддержания вертикального положения различных приборов: индуктивных преобразователей магнитной индукции сейсмоприемников м т.д., установленных на самопроизвольно вращающихся объектах, например в сейсмокосах.
Цель изобретения - повышение надежности устройства.
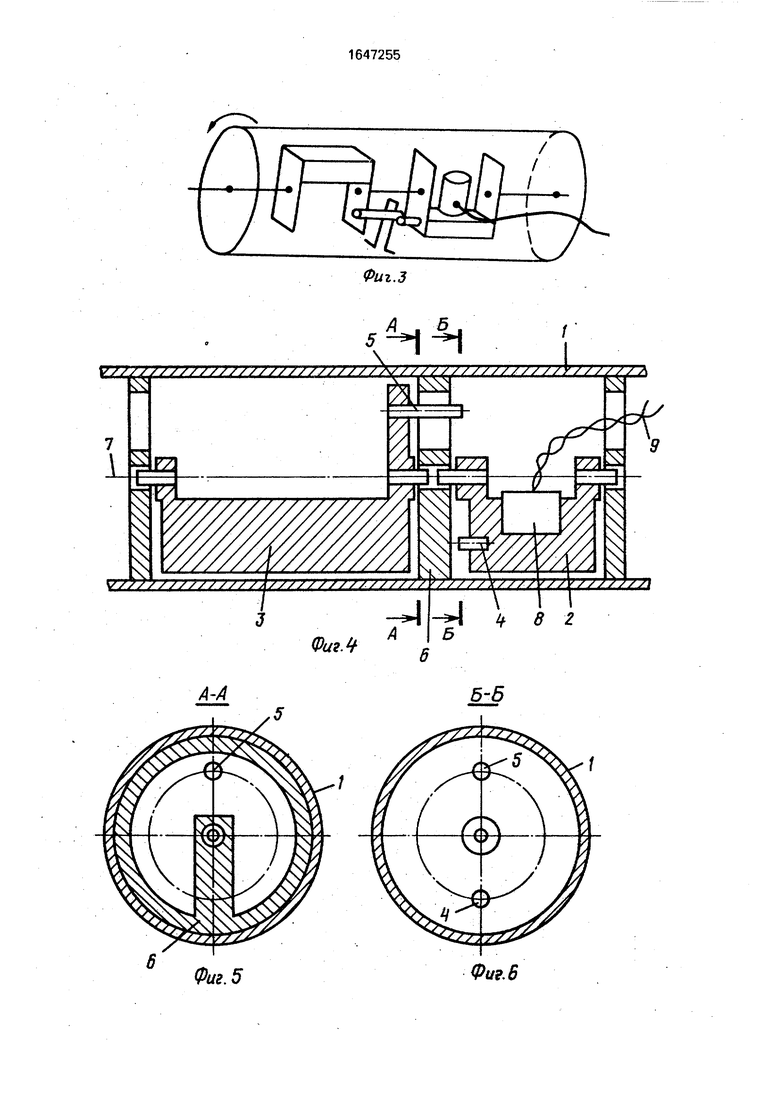
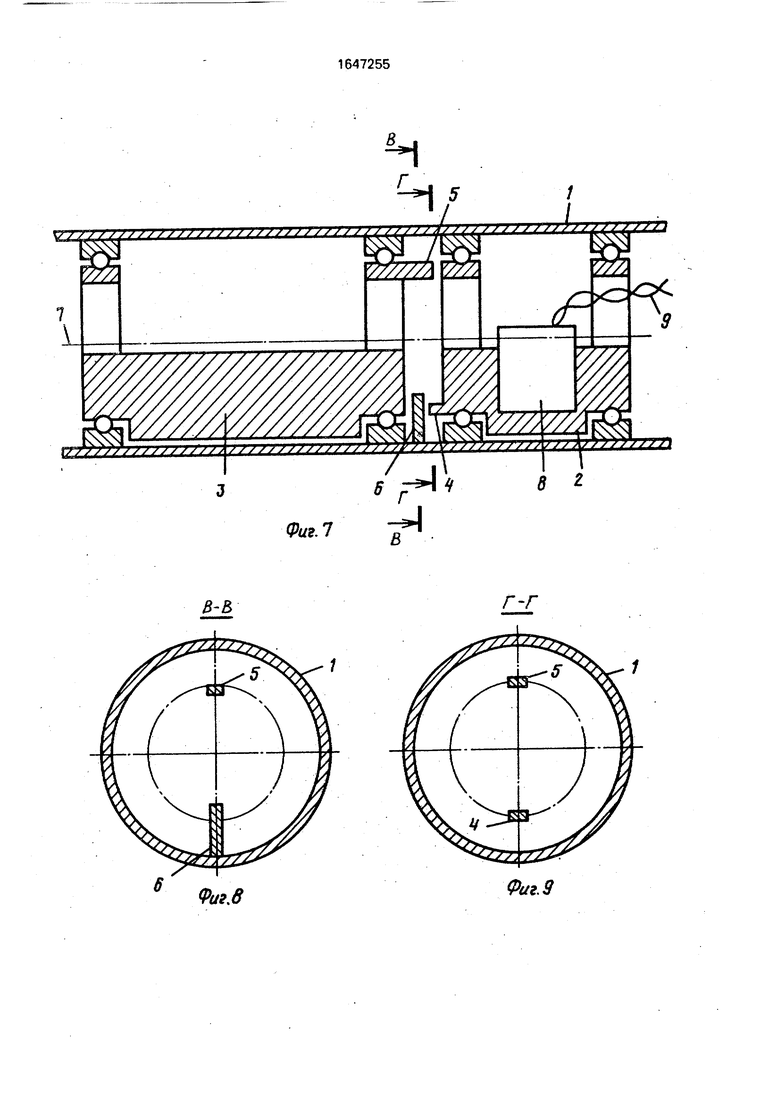
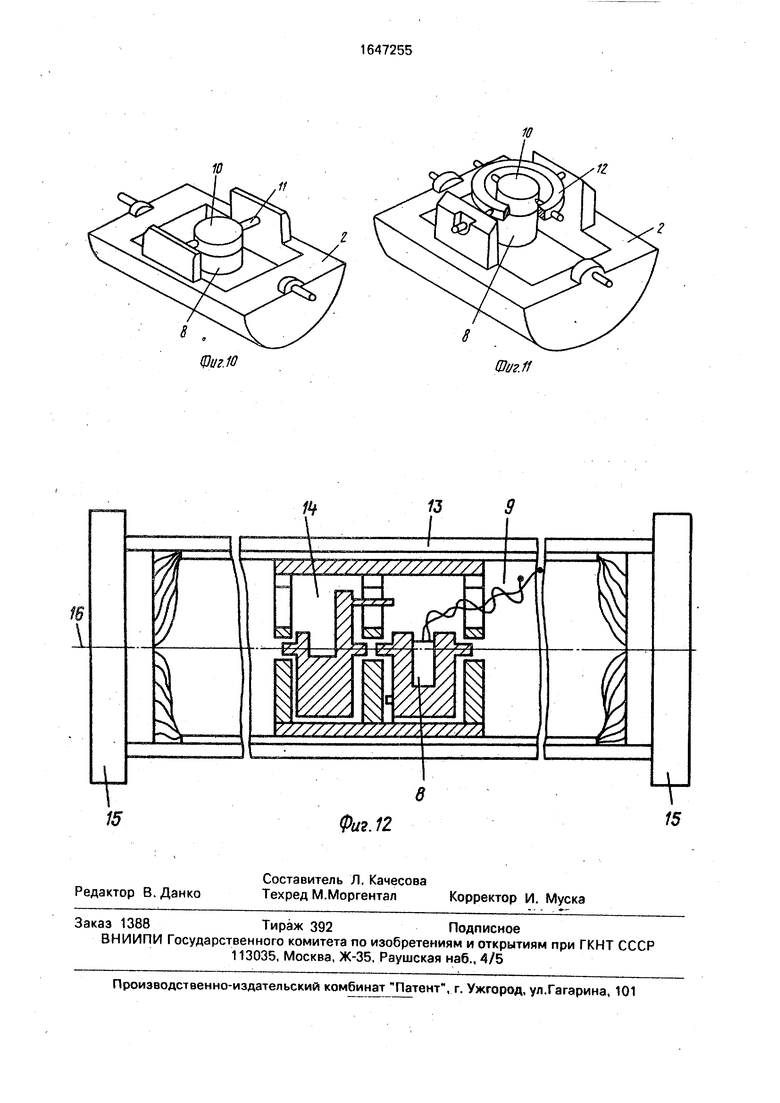
На фиг. 1-3 показана схема устройства, в трех последовательных угловых положениях корпуса относительно оси вращения; на фиг. 4 - схема выполнения устройства; на фиг.5 - сечение А-А на фиг,4; на фиг.6 - сечение Б-Б на фиг.4; на фиг.7 - вариант выполнения устройства; на фиг.8 - сечение В-В на фиг, 7; на фиг. 9 - сечение Г-Г на фиг.7; на фиг 10 и 11 - конструкции крепления прибора на рабочем маятнике соответственно с помощью оси качания (вала) и карданного подвеса; на фиг. 12 - пример применения устройства для ориентирования в вертикальном положении сейсмопри- емника в секции сейсмокосы.
Устройство для самоориентации прибора содержит корпус 1, внутри которого размещен рабочий 2 и дополнительный 3 маятники, каждый из которых снабжен соответственно выступами 4 и 5. Между маят- никами расположен упор 6, жестко закрепленный на корпусе 1. Ось вращения 7 корпуса 1 соосна (или близка в этому) с осями вращения маятников 2 и 3. На рабочем маятнике 2 расположен прибор 8, вертикальное положение которо го поддерживается. Прибор 8 с кабельной линией 9 на маятнике 2 может быть закреплен жестко, либо с помощью рамы 10с валом 11 (фиг.4), имеющим ось качания, перпендикулярно оси вращения маятника 2, либо с помощью рамы 10 и карданного подвеса 12 (Фиг.5).
Устройство работает следующим образом.
Маятники 1 и 2 закреплены в корпусе 1 устройства таким образом, что могут вращаться вокруг своих осей. Причем дополнительный маятник 3 имеет момент инерции больше, чем момент инерции рабочего маятника 2.
Для простоты рассмотрения работы предлагаемого устройства допустим, что оно имеет исходное состояние, показанное на фиг.1. В этом состоянии маятники 2 и 3 сохраняют вертикальное положение, а следовательно, вертикальное положение имеет прибор 8, расположенный на рабочем маятнике 2. При повороте корпуса 1 вокруг своей оси 7 на угол более 180° относительно исходного состояния, происходит зацепление упора 6 корпуса 1 с выступом 5 дополнительного маятника 3, и маятник 3 поворачивается с корпусом 1 вокруг оси 7 вращения.
i В этом случае маятник 2 и прибор 8 сохра4- няют вертикальное положение. При дальнейшем повороте корпуса 1 на угол 360° и более (относительно исходного состояния) выступ 6 дополнительного маятника 3 вхо0 дит в зацепление с выступом 4 рабочего маятника 2, маятник 3 под действием силы тяжести возвращается в исходное вертикальное положение, поворачивая (вследствие того, что имеет больший момент
5 инерции) маятник 2 на 180°, который затем под действием силы тяжести поворачивается еще на 180°, возвращаясь в вертикальное положение, совершив полный оборот.
То же происходит при повороте корпуса
0 1 вокруг своей оси как по часовой стрелке, так и против нее. Таким образом, при вращении корпуса 1 устройства вокруг своей оси 7 маятник 2 с прибором 8 находятся в вертикальном положении, причем только
5 при повороте корпуса 1 на угол более 360° рабочий маятник 2 с прибором 8 поворачиваются (перекидываются) на 360° вокруг своей оси и вновь принимают вертикальное состояние. Это позволяет исключить скру0 чивание проводов 9, соединяющих прибор 8 с внешними неподвижными блоками, и поддерживать прибор 8 в вертикальном положении.
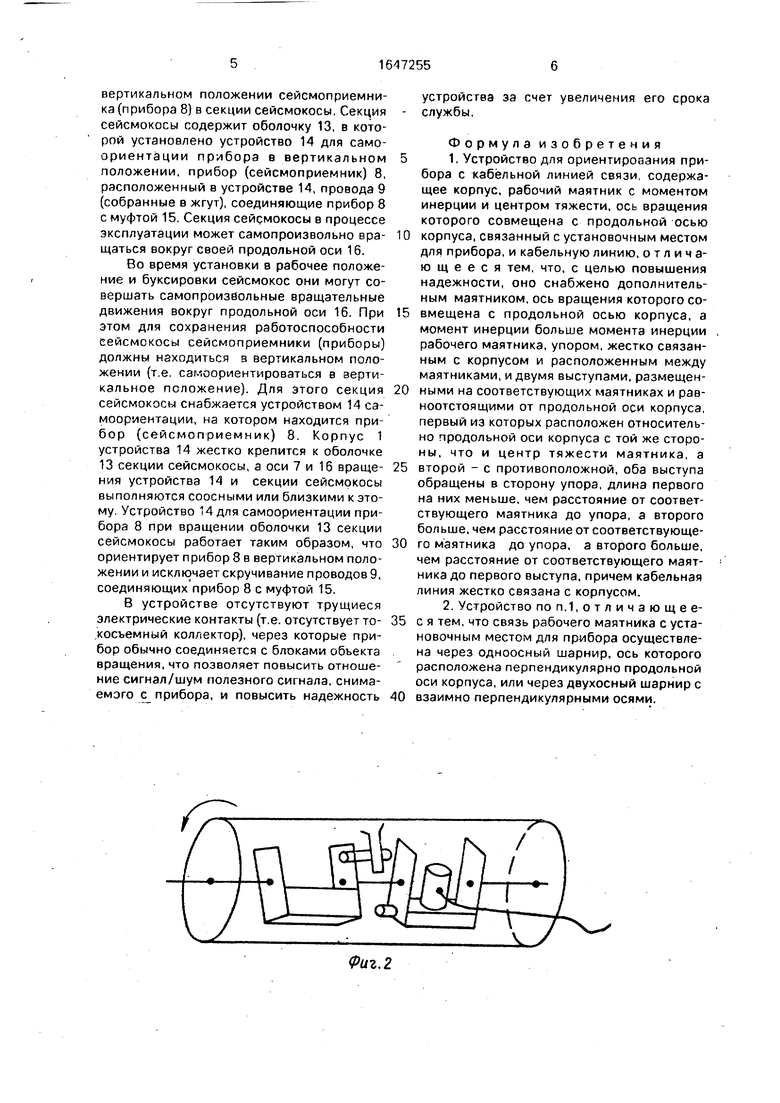
На фиг.2 и 3 показаны конкретные кон5 структивные исполнения предложенного устройства. На фиг.2 маятники 2 и 3 крепятся в корпусе 1 устройства в точках оси вращения с помощью подшипников скольжения, а на фиг.З маятники 2 и 3 кре0 пятся к корпусу 1 на подшипниках качения по своему наружному диаметру. На указанных фигурах прибор 8 жестко крепится к маятнику 2.
На фиг.4 показано конструктивное ис5 полнение, при котором прибор 8 крепится на рабочем маятнике 2 с помощью вала и рамы, имеющей ось качания, перпендикулярную оси вращения маятника 2, а на фиг.5 - конструктивное исполнение, при ко0 тором прибор 8 крепится на рабочем маятнике 2 с помощью рамы с карданным подвесом.
Крепление прибора 8 на маятнике 2 в соответствии с фиг.4 и 5 позволяет поддер5 живать прибор 8 в вертикальном положении не только при вращении корпуса 1 устройства, но и при наклонах последнего вдоль оси вращения.
На фиг.6 показан пример применения Л редлагаемого устройства для ориентации в
вертикальном положении сейсмоприемни- ка (прибора 8) в секции сейсмокосы. Секция сейсмокосы содержит оболочку 13, в которой установлено устройство 14 для самоориентации прибора в вертикальном положении, прибор (сейсмоприемник) 8, расположенный в устройстве 14, провода 9 (собранные в жгут), соединяющие прибор 8 с муфтой 15. Секция сейсмокосы в процессе эксплуатации может самопроизвольно вра- щаться вокруг своей продольной оси 16.
Во время установки в рабочее положение и буксировки сейсмокос они могут совершать самопроизвольные вращательные движения вокруг продольной оси 16. При этом для сохранения работоспособности еейсмскосы сейсмоприемники (приборы) должны находиться з вертикальном положении (т.е. самоориентироваться в вертикальное положение). Для этого секция сейсмокосы снабжается устройством 14 самоориентации, на котором находится прибор (сейсмоприемник) 8. Корпус 1 устройства 14 жестко крепится к оболочке 13 секции сейсмокосы, а оси 7 и 16 враще- ния устройства 14 и секции сейсмокосы выполняются соосными или близкими к этому Устройство 14 для самоориентации прибора 8 при вращении оболочки 13 секции сейсмокосы работает таким образом, что ориентирует прибор 8 в вертикальном положении и исключает скручивание проводов 9, соединяющих прибор 8 с муфтой 15.
В устройстве отсутствуют трущиеся электрические контакты (т.е. отсутствует то- косъемный коллектор), через которые прибор обычно соединяется с блоками обьекта вращения, что позволяет повысить отношение сигнал/шум полезного сигнала, снимаемого с прибора, и повысить надежность
устройства за счет увеличения его срока службы.
Формула изобретения
1.Устройство для ориентирования прибора с кабельной линией связи содержащее корпус, рабочий маятник с моментом инерции и центром тяжести, ось вращения которого совмещена с продольной осью корпуса, связанный с установочным местом для прибора, и кабельную линию, отличающееся тем, что, с целью повышения надежности, оно снабжено дополнительным маятником, ось вращения которого совмещена с продольной осью корпуса, а момент инерции больше момента инерции рабочего маятника, упором, жестко связанным с корпусом и расположенным между маятниками, и двумя выступами, размещенными на соответствующих маятниках и равноотстоящими от продольной оси корпуса, первый из которых расположен относительно продольной оси корпуса с той же стороны, что и центр тяжести маятника, а второй - с противоположной, оба выступа обращены в сторону упора, длина первого на них меньше, чем расстояние от соответствующего маятника до упора, а второго больше, чем расстояние от соответствующего маятника до упора, а второго больше, чем расстояние от соответствующего маятника до первого выступа, причем кабельная линия жестко связана с корпусом.
2.Устройство поп.1,отличающее- с я тем, что связь рабочего маятника с установочным местом для прибора осуществлена через одноосный шарнир, ось которого расположена перпендикулярно продольной оси корпуса, или через двухосный шарнир с взаимно перпендикулярными осями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сейсмокоса для предельного мелководья | 1989 |
|
SU1718174A1 |
| Контейнер для сейсмоприемников донной сейсмической косы | 1979 |
|
SU864220A1 |
| УСТРОЙСТВО ДЛЯ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 1989 |
|
RU2110814C1 |
| ГРАВИТАЦИОННЫЙ ВАРИОМЕТР | 2010 |
|
RU2438151C1 |
| Устройство для подборки сейсмических кос | 1987 |
|
SU1441342A1 |
| УСТРОЙСТВО ДЛЯ ПОДБОРКИ СЕЙСМИЧЕСКИХ КОС | 1993 |
|
RU2054701C1 |
| СПОСОБ ПОВЫШЕНИЯ НАДЁЖНОСТИ МНОГОСЕКЦИОННОЙ МНОГОКАНАЛЬНОЙ ПРОТЯЖЁННОЙ СЕЙСМОПРИЁМНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2767458C1 |
| ГРАДИЕНТОМЕТРИЧЕСКИЙ СЕЙСМОПРИЕМНИК | 2010 |
|
RU2439623C1 |
| Самоориентирующийся сейсмоприемник | 1983 |
|
SU1096592A1 |
| Каротажная станция | 1989 |
|
SU1712923A1 |
Изобретение относится к приборостроению, предназначено для поддержания вертикального положения различных приборов: индуктивных преобразователей магнитной индукции сейсмоприемников и т.д., установленных на сомопроизвольно вращающихся объектах, например, в сейс- мокосах. Целью изобретения является повышение надежности устройства Устройство содержит корпус 1, жестко закрепленный с объектом вращения, размещенный на корпусе рабочий маятник 2 имеющий возможность вращаться вокруг своей оси и предназначенный для установки на нем прибора 8, ось вращения рабочего маятника и ось вращения корпуса соосны Устройство содержит дополнительный маятник 3, момент инерции которого больше момента инерции рабочего маятника, выполненный с возможностью вращения вокруг своей оси, которая соосна с осью рабочего маятника или близка к этому упор 6, неподвижный относительно корпуса 1 расположенный между маятником 2, 3 Каждый из маятников снабжен выступом 4, 5 при этом выступы расположены диаметрально противоположно относительно оси вращения маятников на одинаковом расстояния от нее и направлены в сторону упора 6. Длина выступа рабочего маятника меньше расстояния между упором и рабочим маятником, длина выступа дополнительного маятника больше, чем расстояние между маятниками, а общая длина выступов больше, чем расстояние между маятниками, причем длина упора выбрана такой, чтобы он пересекал траекторию движения выступов. 1 з.п. ф-лы, 12 ил 2 В 1 I / I т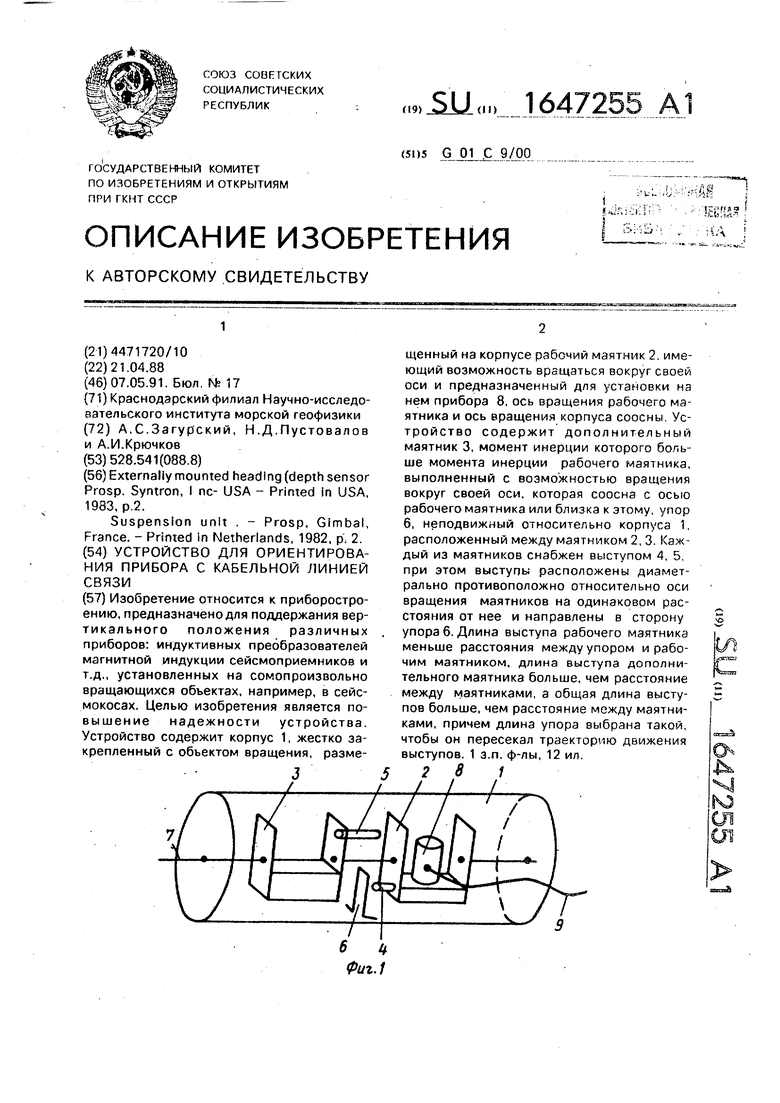
Риг,2
in in гм r 4CD
Оэ
ча
Фиг. 7
Ј-&
ФигЗ
Г-Г
Фи г. 9
Фиг.Ю
Фиг. 12
11
8
Щог.Я
| Externally mounted heading (depth sensor Prosp Syntron, I nc- USA - Printed in USA, 1983, p 2 | |||
| Suspension unit - Prosp, Gimbal, France | |||
| - Printed in Netherlands, 1982, p | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
