Изобретение относится к навигации и может быть использовано для определения местоположения транспортного средства (ТС).
Целью изобретения является повыше- ние информативности.
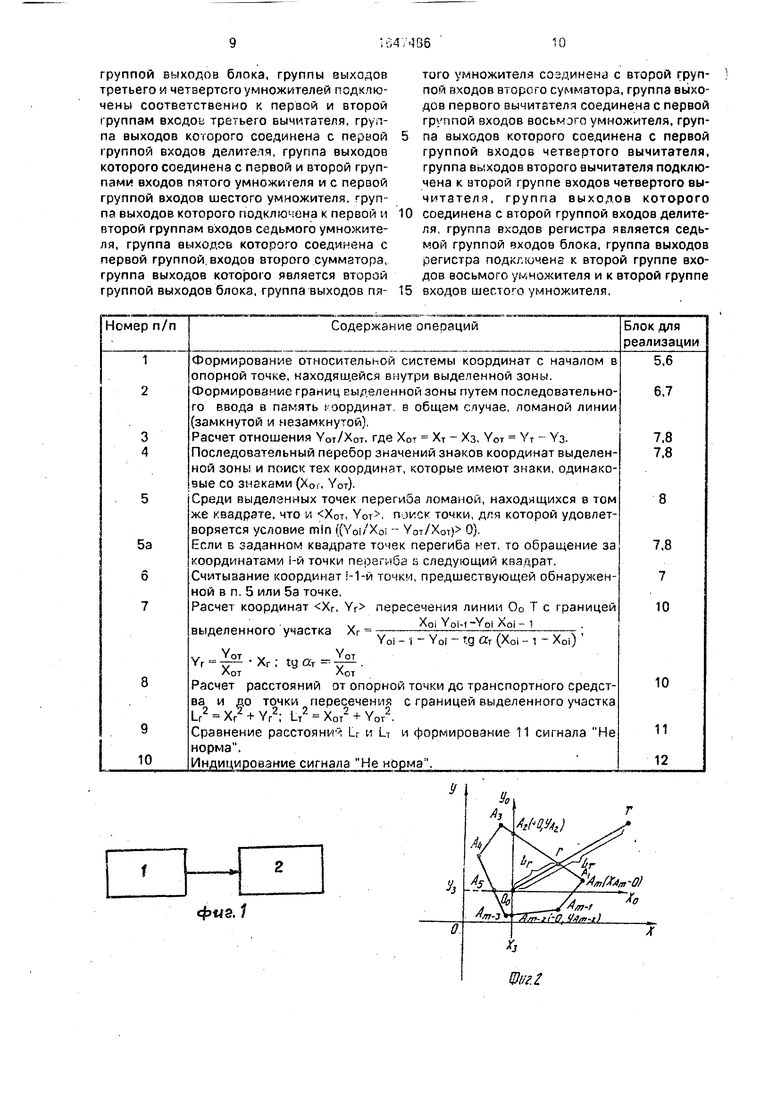
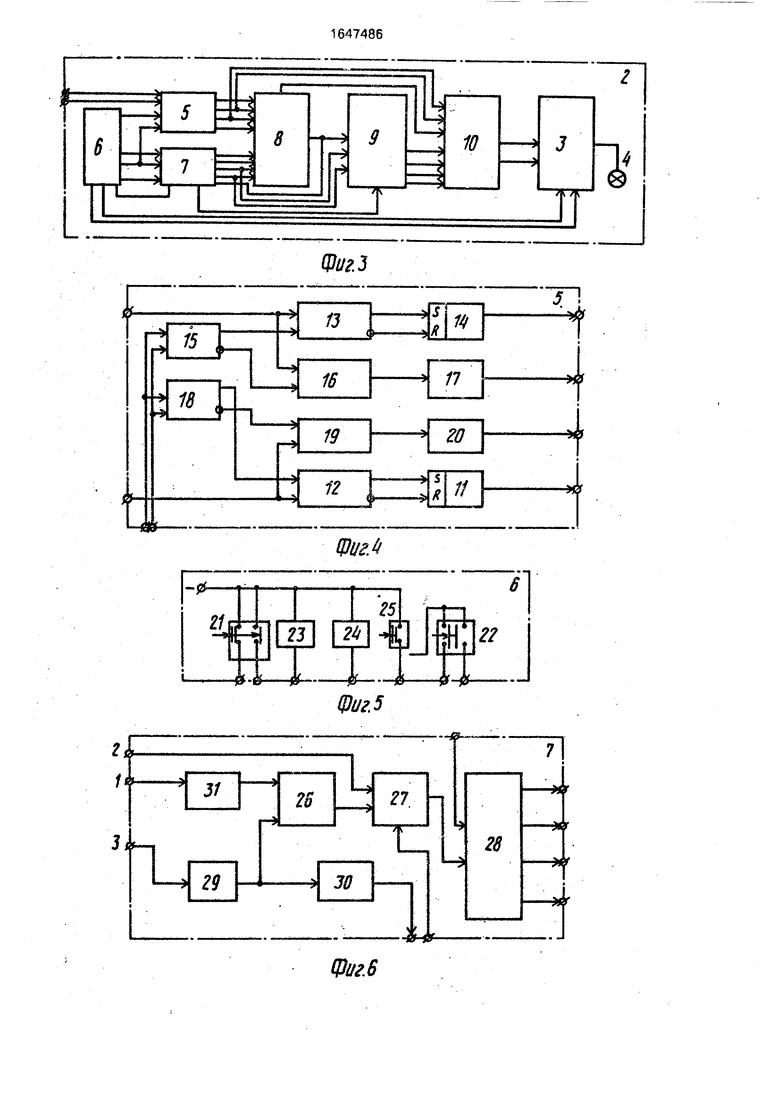
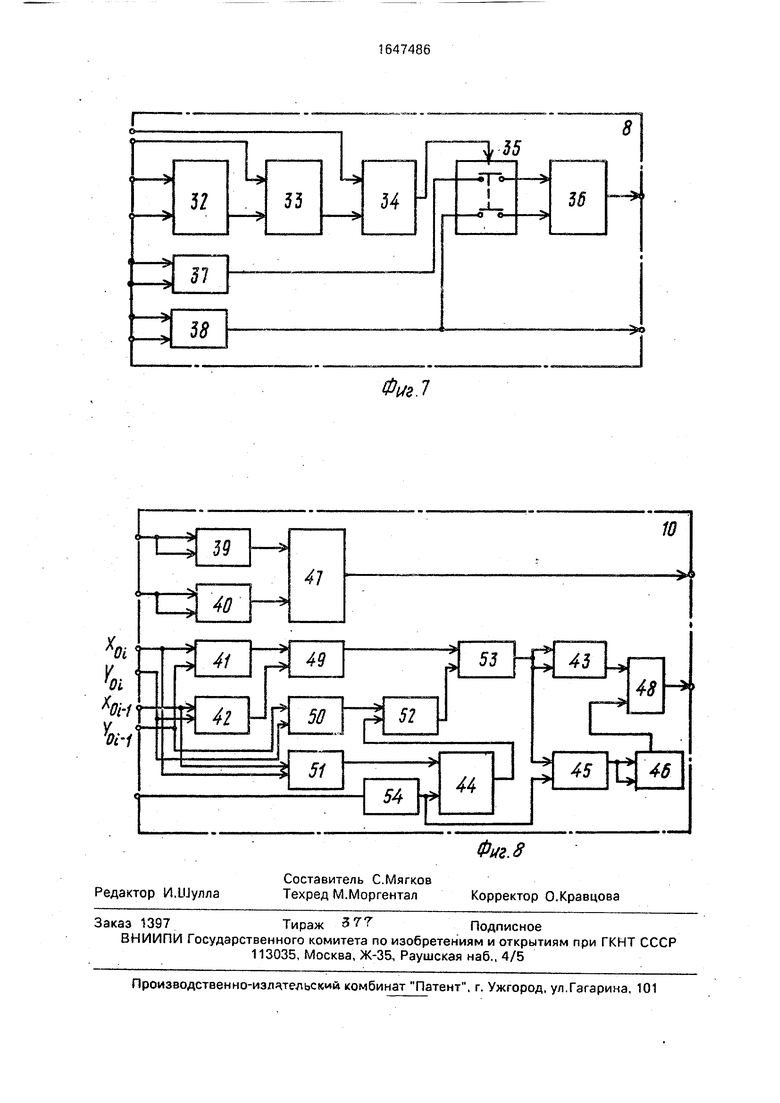
На фиг.1 изображена функциональная схема устройства; на фиг.2 - положение ТС относительно выделенной зоны и положение опорной точки; на фиг.З - функциональная схема решающего блока; на фиг.4 - функциональная схема блока вычисления относительных координат; на фиг.5 - функциональная схема блока клавиатуры; на фиг.б - функциональная схема второго блока памяти; на фиг.7 - функциональная схема первого блока сравнения; на фиг.8 - функ- . циональная схема блока вычисления расстояний.
Устройство содержит приемоиндикатор 1, вычислитель 2, блок 3 сравнения, индикатор 4, блок 5 вычисления относительных координат, блок 6 клавиатуры, блок 7 памяти, блок 8 сравнения, блок 9 памяти, блок 10 вычисления расстояний, триггер 11, элементы 12 и 13 сравнения, триггер 14, регистр 15, сумматор 16, регистры 17 и 18, сумматор 19, регистр 20, ключи 21 и 22, группы 23 и 24 ключей, ключ 25, реверсивный счетчик 26, элемент И-ИЛИ 27, группу 28 элементов памяти, элементы 29 и 30 задержки, генератор 31, элемент 32 сравнения, элемент И 33, элемент 34 сравнения, ключ 35, элемент 36 сравнения, делители 37 и 38, умножители 39-46, сумматоры 47-48, вычитатели 49-52, делитель 53, регистр 54.
Os 4Ь
2
00 О
Устройство работает следующим образом.
Пневмоиндикатор 1 принимает радиосигналы, несущие информацию о текущих координатах ТС, на котором размещено
предлагаемое устройство. Координаты ТС поступают в вычислитель 2.
Перед началом движения с блока 6 клавиатуры в блок 5 вводятся данные о координатах Хз,Уз опорной точки Оо.,Данные о координатах границ выделенной зоны, сформированных в относительной системе координат OoXoYo вводятся в блок 7 памяти, причем обязательным условием является ввод координат точек пересечения границ с осями кооодинат 00Х0 и OoY0. В блок 5 с началом движения по мере поступления информации о местоположении ТС (фиг.2, точка Т) осуществляется пересчет координат из системы координат ОХзУз в относительную систему OoXoYo и запоминание этих координат до прихода следующей информации о новом местоположении. При этом с началом движения вручную с блока 6 клавиатуры запускается блок 7, в котором в каждом цикле контроля местоположения осуществляется последовательное считывание координат точек перегиба ломаной линии, ограничивающей выделенную зону. В блоке 8 сравнения из считываемых координат отыскиваются координаты двух точек перегиба, между которыми находится отрезок прямой, пересекаемой линией ОТ (фиг.2). Найденные координаты поступают в блок 9 памяти для хранения на время обработки найденных координат , X0i, Y0i, Х0и, YOH. В блоке 10 вычисления расстояний осуществляется расчет координат Xr, Yr точки Г пересечения линии ОоТ с границей выделенной зоны, а также оценка величин отрезков ОоГ и ОоТ. Блок 3 сравнения в соответствии с критерием контроля местоположения (Lr 5: Ц, т.е. ТС не должно выходить из выделенной зоны, или Ц ) т.е. ТС не должно в нее входить) формирует сигнал, который поступает на индикатор 4 и при невыполнении критерия отображается лицу, принимающему решения, например водителю этого средства.
Рассмотрим работу каждого из блоков 3-11.
Координаты опорной точки с блока б клавиатуры поступают в параллельном коде. Соответствующие разряды, отведенные под координаты Хз, поступают на вход регистра 15, а координаты YS - на вход регистра 18. Разрешение записи осуществляется с блока 6 клавиатуры сигналом, поступающим на выходы регистров 15 и 18. На входы элементов 12 и 13 сравнения поступают координаты , XT,YT (фиг,4). Элементы 12 и 13 обеспечивают формирование единичного сигнала при условии Хт - Хз 0 и YT - Уз 0, соответственно, т.е. когда координаты ,
Y0r, Y0r положительны. Этот сигнал поступает на S-входы триггеров 11 и 14, устанавливая их в единичное состояние. При отрицательных знаках Х0т и YOT эти триггеры устанавливаются в нулевое состояние. Сумматоры 16 и 19 выполняют функцию сложения с переносом единицы переполнения в младший разряд, например
10
+ 100-вх. 1 101 - вх. 2
1001
-CLJ
010- вых.
См- 16,19
Таким образЬм, сумматоры 16 и 19 и элементы 12 и 13 сравнения выполняют функцию вычитания при расчете координат
() Т в относительной системе координат. Значения этих координат запоминаются в выходных регистрах 17 и 20. В блоке 6 клавиатуры (фиг.5) имеются три ключа: Координаты опорной точки - координаты
границ 21, Запуск 25 и Режим контроля 22. Ключ 21 при замыкании вырабатывает сигналы Разрешение записи координат Хз, Y3 и Запись координат границ выделенной зоны , 2. Ключ 22 при
замыкании формирует сигналы Контроль входа в зону, Контроль выхода из зоны. Группа 23 ключей обеспечивает ввод в параллельном коде адреса координаты, поступающего с блока 24 ключей для записи в
блок 7 памяти.
Перед началом движения в блок 7 памяти в группу 28 элементов памяти с блока 6 вводятся координаты границ. При этом адрес задается с блока 6, поступает на соответствующий вход элемента 27 (фиг.6). На другой вход элемента 27 поступает сигнал разрешения ввода кода адреса в группу 28 элементов памяти. В процессе движения ТС вручную осуществляется запуск генератора
31 замыканием ключа 2, Сигналы с выхода генератора 31 поступают на суммирующий счетный вход счетчика 26. на выходе которого формируется параллельный код порядкового номера i очередной точки перегиба
(фиг.2, ломаная линия). Сформированный адрес через элемент 27 поступает на адресный бпок 28 элементов памяти.
Счегчик 26 является кольцевым и реверсивным. После формирования максимального значения адреса в нем устанавливается код нулевого адреса и далее продолжается его возрастание. В случае обнаружения точки с координатами, удовлетворяющими требованиям пунктов 5 и 5а
(таблица) из блока 8 сравнения на соответствующий вход блока 7 поступает сигнал на считывание координат i-1-й течки из группы 28 элементов памяти. Этот сигнал, пройдя элемент 29 задержки, необходимый для обеспечения завершения считывания координат 1-й точки, поступает на вычитающий вход счетчика 26. Измененное на -1 значение кода поступает на адресный вход группы 28 элементов памяти. Вторично задержанный сигнал через элемент 30 задержки поступает на выход блока 7 для управления блоком 9 памяти. Группа обеспечивает хранение и считывание координат точек перегиба, отражающих границу выделенного участка. Количество разрядов определяется значностью координат X0i, YQ|, при этом два разряда выделены для знаков Х01 и Yoi соответственно. Выходной код группы 28 элементов памяти выдается для запоминания в регистры (соответственно Yoi и Xoi).
В блоке 8 сравнения (фиг.7)элементы 32 и 34 сравнения обеспечивают сравнение на совпадение знаков , Х0т,Х0| и У0т, Y0i, элемент 36 формирует единичный сигнал в случае, когда выполняется неравенство
Y Y
- т-. Данное условие обязательно вы- Xoi Хот
полняется, так как в каждом квадрате имеется хотя бы одна точка перегиба ломаной линии, находящаяся на осях координат (например, фИГ.2, ТОЧКИ А2, As, Am-2, Am).
Блок 9 памяти запоминает координаты X0i, Y0 при подаче управляющего сигнала с выхода блока 8 и координат Х0и, Yoi-t по сигналам с выхода блока 7 (фиг.З).
В умножителях 39 и 40 блока 10 каждая координата возводится в квадрат и в сумматоре 47 формируется значение квадрата расстояния . Координаты Х0|, Y0i, Xoi-1, YoM поступают на соответствующие входы блока 10 (фиг.8) соответственно, после чего согласно указанной схеме реализуется функция, приведенная в пункте 7 таблицы, причем значение Yor/Хот вводится в блок 10 из блока 8 сравнения. После преобразований на выходе блока 10 формируется сигнал U2.
В блоке 3 сравнения контролируется вход или выход ТС из выделенной зоны (в зависимости От сигналов, поступающих с блока 7 клавиатуры). Для этого сравниваются вычисленные в блоке 10 вычисления расстояний величины и Lr2, результат сравнения поступает на индикатор 4.
Формула изобретения
1. Бортовое радионавигационное устройство, содержащее приемоиндикатор.
информационные выходы которого соединены с информационными входами вычислителя, отличаю щезся тем, что, с целью повышения информативности, вычислитель 5 содержит блок вычисления относительных координат, блок клавиатуры, первый и второй блоки памяти, первый и второй блоки сравнения, блок вычитания расстояний и индикатор, первая и вторая информацион0 ные группы входов блока вычисления относительных координат являются информационными входами вычислителя, первый и второй выходы блока вычисления относительных координат соединены с пер5 вым и вторым входами первого блока сравнения, выход которого соединен с первым входом управления первого блока памяти, первая, вторая, третья и четвертая группы выходов которого подключены соответст0 венно к первой, второй, третьей и четвертой группам входов блока вычисления расстояний, первая и вторая группы выходов которого соединены с первой и второй информационными группами входов второ5 го блока сравнения, выход которого соединен с входом индикатора, первый выход блока клавиатуры подключен к входу управления блока вычисления относительных координат, первая и вторая группы выходов
0 которого соединены с первой и второй группами входов первого блока сравнения и с пятой и шестой группами входов блока вычисления расстояний, первая группа выходов блока клавиатуры подключена к первой
5 группе входов второго блока памяти, первый и второй выходы которого присоединены соответственно к третьему и четвертому входам первого блока сравнения, вторая группа выходов блока клавиатуры подклю0 чена к третьей группе входов блока вычисления относительных координат и к второй группе входов второго блока памяти, первая и вторая группы выходов которого соединены соответственно с третьей и четвертой
5 группами входов первого блока сравнения и с первой и второй информационными группами входов первого блока памяти, второй и третий выходы блока клавиатуры под- ключены соответственно к первому и
0 второму входам управления второго блока памяти, выход которого соединен с вторым входом управления первого блока памяти, пятый и шестой выходы блока клавиатуры соединены соответственно с первым и вто5 рым входами управления второго блока сравнения, выход первого блока сравнения соединен с третьим входом управления второго блока памяти, группа выходов первого блока сравнения соединена с седьмой группой входов блока вычисления расстояний.
2.Устройство по п. 1, о s личзющее- с я тем, что блок вычисления относительных координат содержит первый и второй элементы сравнения, первый и второй триггеры, первый и второй сумматоры, первый, второй,третий и четвертый регистры, входы управления записью первого и второго регистров объединены и являются входом управления блока, группы входов первого и второго регистров объединены и являются третьей группой входов блока, прямые группы выходов первого и второго регистров подключены к первым группам входов соответственно первого и второго элементов сравнения, прямые выходы которых соединены с входами установки в еди-.блч- ное состояние первого и второго триггеров, а инверсные - с входами обнуления соответственно первого и второго триггеров, выходы которых являются первым и вторым выходами блока, инверсные группы выходов первого и второго регистров соединены с первыми группами входов первого и второго сумматоров, группы выходов которых подключены к группам входов соответстен- но третьего и четвертого регистров, группы выходов которых явпяютсч соответственно первой и второй группами выходов блока, вторые группы входов первого и второго элементов сравнения объединены с вторыми группами входов соответственно первого и второго сумматоров и являются первой и второй группами входов блока.
3,Устройство по п.1, о т л и ч з ю щ 8 е- с я тем, что второй блок памяти содержмт генератор тактовых импульсов, реверсивный счетчик, элемент И-ИЛИ, группу элементов памяти, первый и второй элементы задержки, первая группа входов группы элементов памяти является первой группой ин- форма циониых входов блока, первая группа входов элемента И-ИЛИ является второй группой входов блока, вход запуска генератора тактовых импульсов является первым входом управления блока, выход генератора тактовых импульсов подключен к входу прямого счета реверсивного счетчика, группа выходов которго соединена с второй группой входов элемента Й-ИЛИ, выход которого подключен к второй группе входов группы элементов памяти, первый и второй выходы которых и первая и вторая группы выходов которых являются соответственно первым, вторым выходами и первой и второй группами выходов блока, вход элемента И-ИЛИ является вторым входом управления блока, вход первого элемента задержки является третьим входом управления блока, выход первого элемента задержка соединен с входом реверсивного счета реверсивного счетчика и с входом второго элемента задержки, выход которого являете третьим выходом блока,
4,Устройство по п.1, о т л и ч а ю щ е е- с я тем, что первый блок сравнения содержит первый, второй и третий элементы сравнения, ключ, элемент И, первый и второй делители, первый и второй входы первого элемента сравнения являются соответстC венно первым и третьим входами блока, первые и вторые группы входов первого и второго делителей являются соответственно первой и второй и третьей и четвертой группами входов блока, выход первого зле5 мента сравнения соединен с первым входом элемента И, выход которого подключен к первому входу второго элемента сравнения, выход которого соединен с входом управления ключа, первая и вторая группы инфор0 мацонных выходов которого соединены соответственно с первой и второй группами входов третьего элемента сравнения, выход которого является выходом блока, группы выходов первого и второго делителей соеди5 нены соответственно с первой и второй группами информационных входов ключа, группа выходов второго делителя является группой выходов блока, вторые входы элемента И и второго элемента сравнения яз0 ляютсй соответственно четвертым и вторым входами блока.
5.Устройство по п.1. о т л и ч а ю щ е е- с я тем, что блок вычисления расстояний содержит первый, второй, третий, четвер5 тый, пятый, шестой, седьмой и восьмой умножители, первый и второй сумматоры, первый, второй, третий и четвертый вычита- телм, делитель и регистр, первая и вторая группы входов первого умножителя объзди0 нены и являются пятой группой входов блока, первая и вторая группы входов второго умножителя объединены и являются шестой группой входов блока, первая группа входов третьего уиножйтеля соединена с первой
5 группой входов первого вычитателя и является первой группой входов блока, вторая группа входов третьего умножителя соединена с первой группой входов второго вычитателя и является четвертой группой входов
0 блока, первая группа входов четвертого умножителя объединена с второй группой входов первого вычитателя и является третьей группой входов блока, вторая группа входов четвертого умножителя соединена с второй
5 группой входов второго вычитателя и является второй группой входов блока, группы выходов первого и второго умножителей подключены соответственно к первой и второй группам входов первого сумматора, группа входов которого является первой
группой выходов блока, группы выходов третьего и четвертого умножителей подключены соответственно к первой и второй группам входов третьего вычктателя, грум- па выходов которого соединена с первой группой входов делителя, группа выходов которого соединена с первой и второй группами входов пятого умножителя и с первой группой входов шестого умножителя, группа выходов которого подключена к первой и второй группам входов седьмого умножителя, группа выходов которого соединена с первой группой, входов второго сумматора, группа выходов которого является второй группой выходов блока, группа выходов пя0
5
того умножителя создинена с второй группой входов второго сумматора, группа выходов первого вычитателя соединена с первой группой входов восьмого умножителя, группа выходов которого соединена с первой группой входов четвертого вычитателя, группа выходов второго вычитателя подключена к второй группе входов четвертого вычитателя, группа выходов которого соединена с второй группой входов делителя, группа входов регистра является седьмой группой входов блока, группа выходов регистра подключена к второй группе входов восьмого умножителя и к второй группе входов шестого умножителя.
#ЭД
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивное устройство для сокращения избыточности цифровой информации | 1983 |
|
SU1136201A1 |
| БОРТОВОЕ НАВИГАЦИОННОЕ УСТРОЙСТВО | 1991 |
|
RU2027200C1 |
| УСТРОЙСТВО ДЛЯ ВЕКТОРНЫХ ВЫЧИСЛЕНИЙ | 1991 |
|
RU2020576C1 |
| Устройство для нахождения оптимального вектора решения системы линейных неравенств | 1985 |
|
SU1315996A1 |
| Устройство для формирования изображения | 1987 |
|
SU1474633A1 |
| Устройство для нахождения экстремума функции | 1985 |
|
SU1287182A1 |
| Устройство для решения двухкритериальных задач нелинейного программирования | 1985 |
|
SU1252795A1 |
| Устройство для преобразования координат | 1990 |
|
SU1800455A1 |
| Устройство для поиска координат точки экстремума функции двух переменных | 1981 |
|
SU966703A1 |
| Устройство для нахождения экстремумов | 1986 |
|
SU1322318A1 |
Изобретение относится к навигации и может быть использовано для определения местоположения транспортного средства. Целью изобретения является повышение информативности устройства путем определения момента пересечения ТС границы выделенной зоны. Приемоиндикатор принимает и передает в вычитатель информацию о текущих координатах ТС. С блока клавиатуры в блок вычисления относительных координат вводятся координаты опорной точки О и информация о границах выделенной зоны. В блоке вычисления относительных координат координаты ТС пересчитываются в связанную с точкой Оо систему координат. Если расстояние от точки Оо до ТС равно расстоянию от точки Оо до границы зоны, принимается решение о пересечении ТС границы зоны. 4 з.п.ф-лы, 8 мл., 1 табл. ё
Ј M(D
Редактор И.Шулла
Составитель С.Мягков
Техред М.МоргенталКорректор О.Кравцова
ФюЛ
Фм.8
| Зарубежная радиоэлектроника, 1983, №4 | |||
| Авторское свидетельство СССР № 1213864,кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
