Изобретение относится к радионавигации и может быть использовано для обеспечения безопасности судовождения в сложных навигационных условиях.
Известна бортовая автоматическая система для предотвращения столкновений [1] , в состав которой входят радиолокатор, определяющий точки опасности, навигационные приборы для определения положения судна, вычислительная машина. В процессе движения судна производится сопоставление координаты точки опасности и координаты судна и эта информация передается на индикатор ситуации.
Недостатком системы является низкая эффективность по обеспечению безопасности судовождения, поскольку в ней не учитывается ряд факторов, влияющих на безопасность плавания в сложных навигационных условиях, в частности не учитываются загрузка судна и его скорость, скорость течения и величина траверса судна относительно точки опасности, не формируются автоматически команды для оптимального управления судном в сложных условиях, не дублируются оптимальные действия капитана, штурмана в этих условиях.
Наиболее близким по совокупности общих существенных признаков к предлагаемому устройству является устройство [2], которое содержит последовательно соединенные приемоиндикатор радионавигационной системы, блок определения расстояния и пороговый блок, выход которого является выходом устройства, а также блок хранения координат точек опасности, выход которого подключен к второму входу блока определения расстояния, а первый вход - к второму выходу приемоиндикатора, который подключен также к третьему входу блока определения расстояния, при этом второй вход блока хранения координат точек опасности является входом ввода координат точек опасности бортового навигационного устройства. С помощью приемоиндикатора определяются координаты движущегося судна, которые поступают в блок определения расстояния, на второй вход которого с выхода блока хранения координат точек опасности поступают значения координат точки опасности. В блоке определения расстояния определяется расстояние от судна до точки опасности, значение которого с его выхода поступает на вход порогового блока, где сравнивается с заданным порогом. Когда судно находится на заданном расстоянии от препятствия, т.е. достаточном, чтобы скорректировать курс с целью обхода препятствия, на выходе порогового блока автоматически вырабатывается сигнал, предупреждающий штурмана об изменении курса движения судна.
Недостатком устройства-прототипа является то, что оно не обеспечивает безопасности судовождения в сложных навигационных условиях.
Целью изобретения является обеспечение безопасности судовождения в сложных навигационных условиях.
Цель достигается тем, что в бортовое навигационное устройство, содержащее последовательно соединенные приемоиндикатор радионавигационной системы, блок определения расстояния и пороговый блок, выход которого является выходом устройства, а также блок хранения координат точек опасности, выход которого подключен к второму входу блока определения расстояния, а первый вход - к второму выходу приемоиндикатора, который подключен также к третьему входу блока определения расстояния, при этом второй вход блока хранения координат точек опасности является входом ввода координат точек опасности бортового навигационного устройства, введены вычитатель, блок определения пути торможения, блок формирования радиуса опасности, блок определения траверса, блок команд управления, при этом первые входы вычитателя и блока определения пути торможения подключены к скоростному выходу приемоиндикатора радионавигационной системы, выход вычитателя подключен к второму входу блока определения пути торможения, выход которого подключен к первым входам блока формирования радиуса опасности и блока команд управления, второй вход которого, объединенный с первым входом порогового блока, подключен к выходу блока определения расстояния, подключенному к первому входу блока определения траверса, выход которого подключен к третьему входу блока команд управления, второй вход порогового блока подключен к выходу блока формирования радиуса опасности, второй вход блока определения траверса подключен к первому входу блока определения расстояния, третий вход блока определения траверса подключен к выходу блока хранения координат точек опасности, вторые входы блока формирования радиуса опасности, вычитателя, третий вход блока определения пути торможения, четвертый вход блока определения траверса объединены и подключены к второму выходу приемоиндикатора радионавигационной системы, третий вход вычитателя и четвертый вход блока определения пути торможения являются соответственно скоростным входом и входом ввода варианта загрузки судна бортового навигационного устройства, а выходы вычитателя, блока команд управления, блока определения траверса, блока определения расстояния и блока хранения координат точек опасности являются соответственно выходом скорости течения, выходом команд управления движением судна, выходом величины траверса на точку опасности, выходом величины расстояния до точки опасности и выходом значения координат точки опасности бортового навигационного устройства.
Сущность изобретения заключается в том, что перед рейсом определяются координаты точек опасности (малые глубины, банки, боны, молы и т.д.), расположенные в районе трассы маршрута следования судна, которые вводятся штурманом в блок хранения координат точек опасности. При движении судна по маршруту происходит автоматическое определение вхождения судна в зону опасности, величины путем торможения судна с учетом его загрузки, скорости движения и скорости течения, определяется расстояние до точки опасности и ее траверса, и в зависимости от расстояния до точки опасности и величины траверса вырабатывается команда на изменение скорости движение судна и изменение курса его движения.
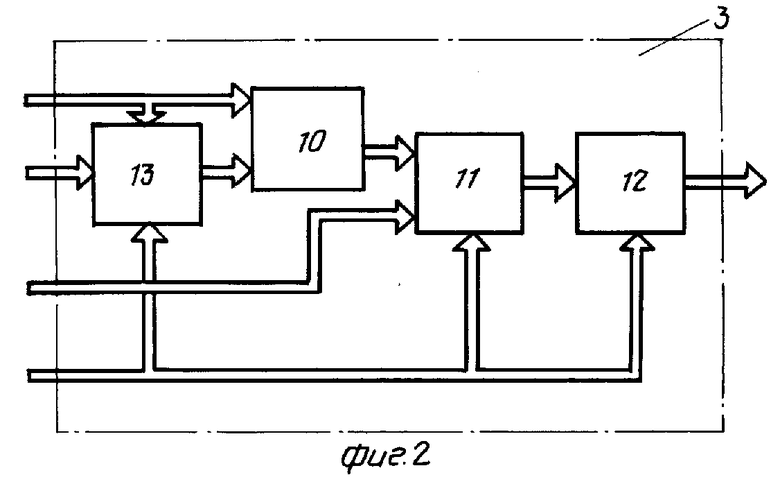
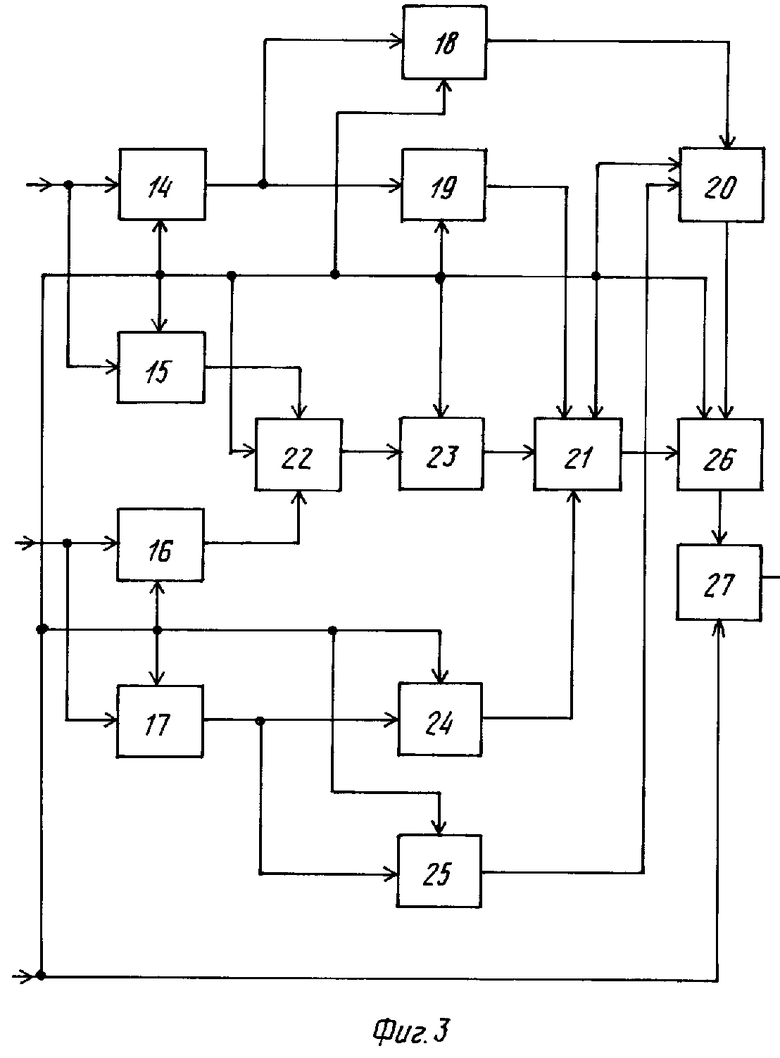
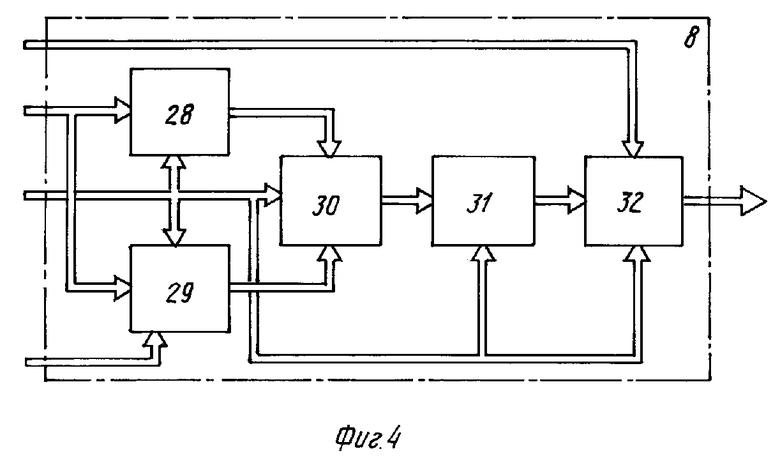
На фиг. 1 приведена структурная схема бортового навигационного устройства; на фиг. 2 - структурная схема блока определения пути торможения; на фиг.3 - структурная схема блока определения расстояния; на фиг.4 - структурная схема блока определения траверса; на фиг.5 - структурная схема блока определения путевого угла; на фиг.6 представлен решаемый треугольник на сфере; на фиг.7 приведена структурная схема блока определения пеленга; на фиг.8 приведена схема маршрута движения судна; на фиг.9 - структурная схема блока команд управления.
Бортовое навигационное устройство (фиг.1) содержит приемоиндикатор 1 радионавигационной системы, вычитатель 2, блок 3 определения пути торможения, блок 4 формирования радиуса опасности, блок 5 команд управления, пороговый блок 6, блок 7 определения расстояния, блок 8 определения траверса и блок 9 хранения координат точек опасности, при этом приемоиндикатор 1, блок 7 определения расстояния и пороговый блок 6 соединены последовательно. Выход порогового блока 6 является выходом устройства, выход блока 9 хранения координат точек опасности подключен к второму входу блока 7 определения расстояния, а первый вход - к второму выходу приемоиндикатора 1 радионавигационной системы, который подключен также к третьему входу блока 7 определения расстояния. Второй вход блока 9 хранения координат точек опасности является входом ввода координат точек опасности является входом ввода координат точек опасности бортового навигационного устройства. Первые входы вычитателя 2 и блока 3 определения пути торможения подключены к скоростному выходу приемоиндикатора 1 радионавигационной системы, выход вычитателя 2 подключен к второму входу блока 3 определения пути торможения, выход которого подключен к первым входам блока 4 формирования радиуса опасности и блока 5 команд управления. Второй вход блока 5, объединенный с первым входом порогового блока 6, подключен к выходу блока 7 определения расстояния, подключенному к первому входу блока 8 определения траверса, выход которого подключен к третьему входу блока 5 команд управления. Второй вход порогового блока 6 подключен к выходу блока 4 формирования радиуса опасности, второй вход блока 8 определения траверса подключен к первому входу блока 7 определения расстояния, третий вход блока 8 определения траверса подключен к выходу блока 9 хранения координат точек опасности. Вторые входы блока 4 формирования радиуса опасности, вычитателя 2, третий вход блока 3 определения пути торможения, четвертый вход блока 8 определения траверса объединены и подключены к второму выходу приемоиндикатора 1 радионавигационной системы, при этом третий вход вычитателя 2 и четвертый вход блока 3 определения пути торможения являются соответственно скоростным входом и входом ввода варианта загрузки судна бортового навигационного устройства, а выход вычитателя 2, блока 5 команд управления, блока 8 определения траверса, блока 7 определения расстояния и блока 9 хранения координат точек опасности являются соответственно выходом скорости течения, выходом команд управления движением судна, выходом величины траверса на точку опасности, выходом величины расстояния до точки опасности и выходом значения координат точки опасности бортового навигационного устройства.
Блок 3 определения пути торможения содержит (фиг.2) переключатель 10, выход которого подключен к первому входу последовательно соединенных блока 11 дешифраторов и блока 12 памяти, выход которого является выходом блока 3 определения пути торможения, при этом первый вход переключателя 10 объединен с первым входом сумматора 13 является первым скоростным входом блока 3 определения пути торможения, второй вход сумматора 13, выход которого подключен к второму входу переключателя 10, является вторым скоростным входом блока 3, четвертым входом блока 3 является второй вход блока 11 дешифраторов, а объединенные третьи входы блока 11 дешифраторов и сумматора 13, второй вход блока 12 памяти являются третьим (синхронизирующим) входом блока 3 определения пути торможения.
На каждом судне имеется информация капитану о маневренных элементах судна, где в виде номограмм содержатся сведения о величине тормозного пути судна для различных вариантов его загрузки и скорости движения, полученные экспериментальным путем:
Sтп= f (Qi , Vi), где Qi - вариант загрузки судна;
Vi - скорость движения судна относительно Земли.
Можно, например, задаться следующими значениями вариантов загрузки судна:
Q1 = Q ; Q2 =  Qмакс
Qмакс
Q3 =  Qмакс; Q4 =
Qмакс; Q4 =  Qмакс
Qмакс
Q5 = Qмакс,
где Qмакс - вариант максимальной загрузки судна.
Для обозначения вариантов загрузки в двоичном коде достаточно трехразрядного числа. Можно выбрать тридцать различных значений скорости для каждого варианта загрузки судна, для чего достаточно в двоичном коде пятиразрядного числа. Таким образом, общий объем всей информации уместится в восьмиразрядном двоичном числе.
Работает блок 3 определения пути торможения следующим образом. Перед выходом в плавание известный вариант загрузки Qi вводится в блок 3 (четвертый вход блока 3, второй вход блока 11 дешифраторов). На первый скоростной вход блока 3 со скоростного выхода приемоиндикатора 1 поступает значение скорости движения судна относительно поверхности Земли (дна водоема). Комбинация нулей и единиц трехразрядного числа, определяющего вариант загрузки судна, и комбинация нулей и единиц пятиразрядного числа, определяющего значение измеренной скорости, поступающие на входы блока 11 дешифраторов, подключают его выход к той или иной ячейке памяти блока 12 памяти, в которой записано значение тормозного пути судна, соответствующее снятой номограмме. При этом если точкой опасности является точка, жестко связанная с поверхностью Земли (мель, мол и т.д.), то для определения тормозного пути используется скорость движения судна относительно Земли, если речь идет о точке опасности, плавающей на поверхности воды, то скорость судна должна определяться относительно воды. В этом случае с помощью переключателя 10 отключается его первый вход и подключается его второй вход, с которым соединен выход сумматора 13.
На первый вход сумматора 13 поступают значения скорости движения судна относительно Земли, а на его второй вход, подключенный к выходу вычитателя 2, поступает значение величины скорости течения воды. В результате сложения на выходе сумматора 13 появляется значение скорости движения судна относительно воды, которое через второй вход переключателя 10 поступает на первый вход блока 11 дешифраторов и далее в блок 12 памяти для определения пути торможения судна.
Блок 9 хранения координат точек опасности, также как и блок 3 определения пути торможения, содержит блок дешифраторов и блок памяти, в который до плавания записываются все возможные точки опасности, расположенные как на маршруте следования судна, так и отстоящие на некотором удалении от маршрута.
Блок 4 формирования радиуса опасности представляет собой сумматор, первый вход которого имеет обнуленный младший разряд, чем достигается удвоение входной величины за счет сдвига двоичного числа на один разряд в сторону старших разрядов, второй вход которого имеет фиксированный код, равный числу 0,8, путем соответствующей распайки входных шин разрядов двоичного числа.
Блок 7 определения расстояния (фиг.3) решает задачу определения расстояния из выражения
cos S = sin ϕ1 sin ϕ2 +
+ cos ϕ1 cos ϕ2 cos ( λ2-λ1 )
Это выражение представляет собой определение длины ортодромии, т.е. линии, соединяющей на сфере две точки. Движение судна осуществляется, как правило, по ортодромии. В этой формуле ϕ1, λ1, ϕ2, λ2 - координаты начала и конца ортодромии. Если под координатами ϕ1, λ1 понимать координаты местоположения судна ϕc, λc, а под координатами ϕ2, λ2 - координаты заданной точки ϕi, λi то длина ортодромии определяется из выражения
сos S = sin ϕc sin ϕi +
+ cos ϕc cos ϕi cos (λi-λc) Используя это выражение можно построить блок расчета дальностей с использованием определения ортодромического расстояния судна до заданной точки.
Блок 7 определения расстояний содержит первый 14, второй 15, третий 16 и четвертый 17 регистры для записи соответственно значений ϕc, λc, λi и ϕi , блок 18 вычисления sin ϕc, блок 19 вычисления cos ϕc, первый умножитель 20 значений sin ϕc sin ϕi, второй умножитель 21 значений сos ϕc cos ϕi x cos (λi-λc) , вычитатель 22 значений (λi-λc) , блок 23 вычисления cos (λi-λc) , блок 24 вычисления cos ϕi блок 25 вычисления sin ϕi, сумматор 26, блок 27 вычисления arccos Х. Выход первого регистра 14 подключен к первым входам блоков 18, 19 вычисления sin ϕc, сos ϕc, выходы которых подключены соответственно к первым входам первого 20 и второго 21 умножителей. Выходы второго 15 и третьего 16 регистров подключены соответственно к первому и второму входам вычитателя 22, выход которого подключен к первому входу блока 23 вычисления значения cos (λi-λc) , выход которого подключен к второму входу второго умножителя 21. Выход четвертого регистра 17 подключен к первым входам блоков 24 и 25 вычисления значений соответственно cos ϕiи sin ϕi, при этом выход блока 24 вычисления значений cos ϕi подключен к третьему входу второго умножителя 21, а выход блока 25 вычисления значения sin ϕi подключен к второму входу первого умножителя 20. Выходы первого 20 и второго 21 умножителей подключены соответственно к первому и второму входам сумматора 26, выход которого подключен к первому входу блока 27 вычисления значения arccos Х. Вторые входы первого 14, второго 15, третьего 16 и четвертого 17 регистров, блоков 18, 19, 23, 24, 25, 27 вычисление значений соответственно sin ϕc, сos ϕc, сos (λi-λc) , cos ϕi, sin ϕi, arcсos Х, третьи входы первого умножителя 20, вычитателя 22, сумматора 26, четвертый вход второго умножителя 21 объединены и являются синхронизирующим (третьим) входом блока определения расстояния, первые входы первого 14 и второго 15 регистров объединены и являются сигнальным (первым) входом блока определения расстояния, первые входы третьего 16 и четвертого 17 регистров объединены и являются входом координат точки опасности блока определения расстояния (вторым входом блока 7), выходом которого является выход блока 27 вычисления значения arccos Х.
Работает блок 7 определения расстояния следующим образом. На его сигнальный (первый) вход - первые входы регистров 14, 15 с первого (координатного) выхода приемоиндикатора 1 поступают текущие значения координат местоположения судна ϕc, λc (в регистр 14 поступают значения широты ϕс, в регистр 15 - значения долготы λс). На второй вход - вход координат точки опасности блока 7 определения расстояния (первые входы регистров 16, 17) с выхода блока 9 хранения координат точек опасности поступают географические координаты точек опасности ϕi, λi (в регистр 16 поступает значение широты ϕi, в регистр 17 поступает значение долготы λi). На синхронизирующий (третий) вход блока 7 определения расстояния поступают синхроимпульсы, формирующие его диаграмму работы во времени. С выхода первого регистра 14 значение широты ϕс местоположения судна поступает на первые входы блоков 18 и 19 вычисления значений sin ϕc и cos ϕc. Вычисленные значения sin ϕc и cos ϕc с выходов блоков 18 и 19 поступают соответственно на первые входы первого 20 и второго 21 умножителей. С выходов второго 15 и третьего 16 регистров значений долготы λс текущего местоположения судна и значения долготы λi точки опасности поступают соответственно на первый и второй входы вычитателя 22, с выхода которого вычисленное значение разности (λi-λc) поступает на вход блока 23 вычисления значения cos (λi-λc) , с выхода которого вычисленное значение сos (λi-λc) поступает на второй вход второго умножителя 21. С выхода четвертого регистра 17 значение широты ϕi точки опасности поступает на первые входы блоков 24 и 25 вычисления значений cos ϕi и sin ϕi с выходов которых вычисленные значения сos ϕi и sin ϕiпоступают соответственно на третий вход второго умножителя 21 и второй вход первого умножителя 20. С выхода первого умножителя 20 вычисленное значение произведения sin ϕc x sin ϕi поступает на первый вход сумматора 26, на второй вход которого с выхода второго умножителя 21 поступает значение произведения cos ϕc cosϕi cos (λi-λc). C выхода сумматора 26 вычисленное значение
Х = sin ϕc sin ϕi +
+ cos ϕc cos ϕi сos (λi-λc) поступает на первый вход блока 27 вычисления значения arccos X, представляющее собой ортодромическое расстояние от местоположения судна с координатами ϕc, λc до точки опасности с координатами ϕi, λi, которое с его выхода поступает на первый вход блока 8 определения траверса.
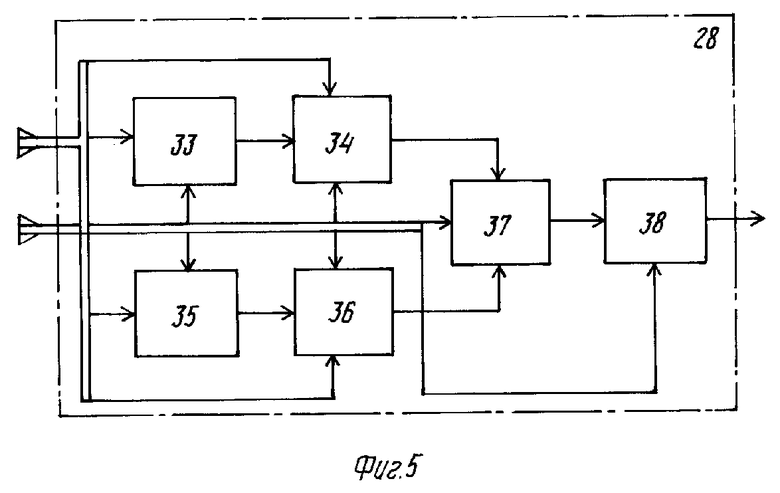
Блок 8 определения траверса (фиг.4) содержит блок 28 определения путевого угла, блок 29 определения пеленга, выходы которых подключены соответственно к первому и второму входам вычитателя 30. Выход вычитателя 30 подключен к первому входу блока 31 определения значения sin Δ ϕ выход которого подключен к первому входу умножителя 32. Выход умножителя 32 является выходом блока 8 определения траверса, первым входом которого является второй вход умножителя 32, вторым входом - объединенные первые входы блока 28 определения путевого угла и блока 29 определения пеленга, третьим - второй вход блока 29 определения пеленга, а объединенные вторые входы блока 28 определения путевого угла и блока 31 определения значения sin Δ ϕ третьи входы блока 29 определения пеленга, вычитателя 30 и умножителя 32 являются четвертым (синхронизирующим) входом блока 8 определения траверса.
Работает блок 8 определения траверса следующим образом. На первые входы блока 28 определения путевого угла и блока 29 определения пеленга (второй вход блока 8 определения траверса) с первого (координатного) выхода приемоиндикатора 1 поступает текущее значение координат местоположения судна - широта ϕc и долгота λc . На второй вход блока 29 определения пеленга (третий вход блока 8 определения траверса) поступает значение координат местоположения точки опасности - широта ϕiи долгота λi.
В блоке 28 определения путевого угла (ПУ) блока 8 определяется величина путевого угла из выражения
ПУ = arctg  , где Δ ϕ - приращение широты в единицу времени;
, где Δ ϕ - приращение широты в единицу времени;
Δ λ - приращение долготы в единицу времени.
Блок 28 определения путевого угла (фиг.5) содержит первый элемент 33, задержки, первый сумматор 34, второй элемент 35 задержки, второй сумматор 36, делитель 37 и вычислитель 38 значения arctg Х. Выход первого элемента 33 задержки подключен к первому входу первого сумматора 34, выход второго элемента 35 задержки подключен к первому входу второго сумматора 36. Выходы первого 34 и второго 36 сумматоров подключены соответственно к первому и второму входам делителя 37, выход которого подключен к первому входу вычислителя 38 значений arctg Х, выход которого является выходом блока 28 определения пеленга. Первые входы первого 33 и второго 35 элементов, задержки, а также вторые входы первого 34 и второго 36 сумматоров, объединены и представляют собой первый вход блока 28 определения путевого угла, объединенные вторые входы элементов 33, 35 задержки, вычислителя 38 значений arctg Х, третьи входы первого 34 и второго 36 сумматоров, делителя 37 объединены и представляют собой второй (синхронизирующий) вход блока 28 определения путевого угла.
Работает блок 28 следующим образом. На первый вход блока 28 (первые входы элементов 33, 35 задержки и вторые входы сумматоров 34, 36) поступают соответственно с первого выхода приемоиндикатора 1 текущие значения долготы λc и широты ϕc местоположения судна, а на его второй вход с второго (синхронизирующего) выхода приемоиндикатора 1 поступают синхронизирующие его работу импульсы с периодом следования Т = 0,1 с, поступающие на вторые входы элементов 33, 35 задержки, третьи входы сумматоров 34, 36, делителя 37 и второй вход вычислителя 38 arctg Х. При этом на первый вход первого элемента 33 задержки и второй вход первого сумматора 34 поступает текущее значение широты ϕk+1, а на первый вход второго элемента 35 задержки и второй вход второго сумматора 36 поступает текущее значение долготы λk+1. На первые входы сумматоров 34, 36 поступают задержанные на один такт (Т = 1 c) предшествующие значения ϕk и λk. На выходе сумматоров 34 и 36 образуются разности Δ ϕk и Δ λk. Поскольку интервал между соседними отсчетами 1с, эти разности характеризуют изменение широты и долготы за 1с. С выходов сумматоров 34, 36 значения Δ ϕk, Δ λk поступают на делитель 37, в котором вычисляется отношение X =  , поступающее с его выхода на вычислитель 38 arctg Х, что представляет собой значение путевого угла движения судна.
, поступающее с его выхода на вычислитель 38 arctg Х, что представляет собой значение путевого угла движения судна.
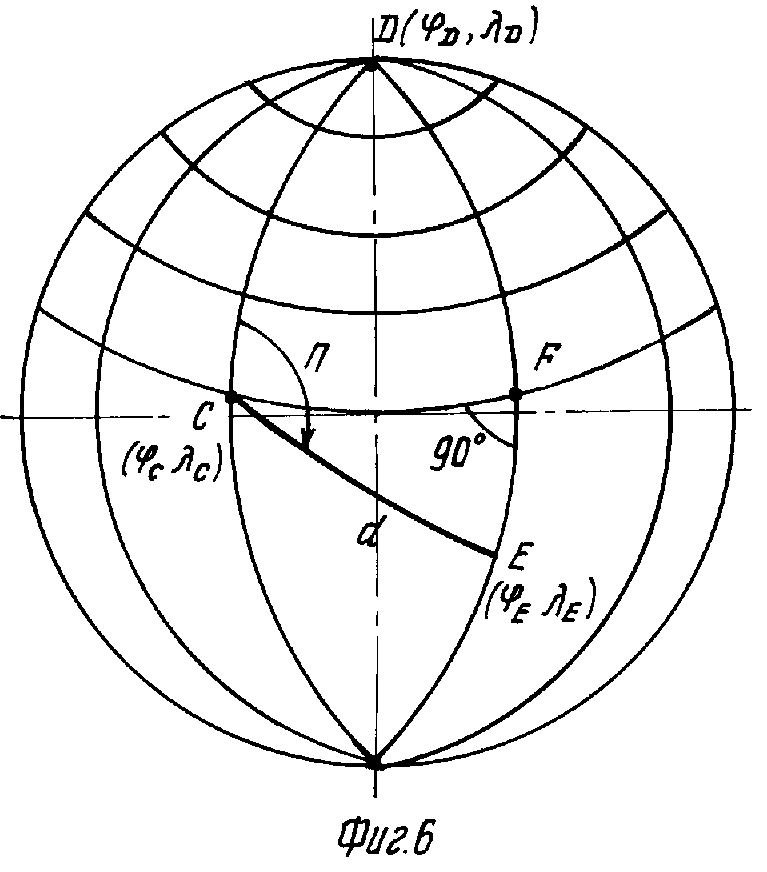
В блоке 29 определения пеленга блока 8 определяется значение величины пеленга судна на точку опасности как угол на сфере, заключенный между северным направлением меридиана и направлением на точку опасности (фиг.6). Расчет пеленга осуществляется методом cферического триугольника. На фиг.6 представлен сферический треугольник CDE, где пеленг DCE образован линиями DC и СЕ, при этом точка С определяется текущими географическими координатами судна ϕc, λc, точка D - координатой широты, равной 90o, и координатой долготы текущего местонахождения судна, координаты точки опасности Е задаются заранее. Так как известны координаты сторон сферического треугольника CDЕ, то значение пеленга (угол DCE) может быть определено из теоремы синусов: =
=  прио этом сторона СЕ определяется из сферического треугольника CFЕ по формуле
прио этом сторона СЕ определяется из сферического треугольника CFЕ по формуле
CЕ = arccos [сos R Δ λСЕ cos R Δ ϕСЕ] где R - радиус Земли; Δ λCE=λc-λE ; Δ ϕCE=ϕc-ϕE .
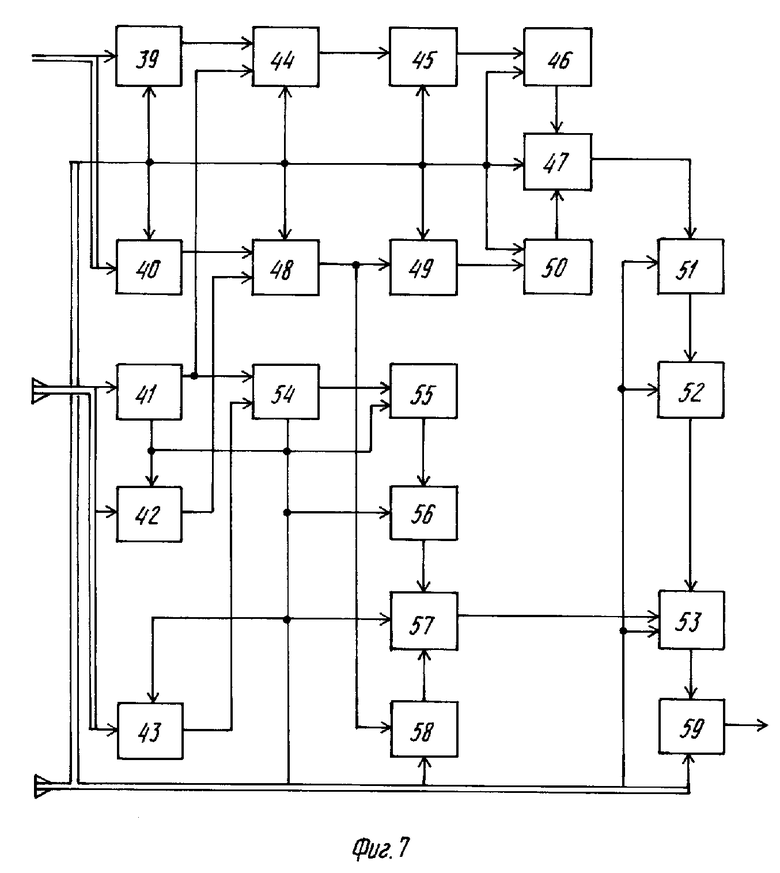
Блок 29 определения пеленга блока 8 (фиг.7) содержит первый 39, второй 40, третий 41, четвертый 42, пятый 43 регистры, первый вычитатель 44, первый умножитель 45, первый блок 46 вычисления косинуса, второй умножитель 47, второй вычитатель 48, третий умножитель 49, второй блок 50 вычисления косинуса, блок 51 вычисления арккосинуса, первый блок 52, делитель 53, третий вычитатель 54, четвертый умножитель 55, второй блок 56 вычисления, пятый умножитель 57, третий блок 58 вычисления синуса, блок 59 вычисления арксинуса. Выход первого регистра 39 подключен к первому входу первого вычитателя 44, выход которого подключен к первому входу первого умножителя 45. Выход умножителя 45 подключен к первому входу блока 46 вычисления косинуса, выход которого подключен к первому входу второго умножителя 47. Выход второго регистра 40 подключен к первому входу второго вычитателя 48, выход которого подключен к первому входу третьего умножителя 49. Выход умножителя 49 подключен к первому входу блока 50 вычисления косинуса, выход которого подключен к второму входу второго умножителя 47. Выход умножителя 47 подключен к первому входу блока 51 вычисления арккосинуса, выход которого подключен к первому входу блока 52 вычисления синуса. Выход блока 52 подключен к первому входу делителя 53, выход которого подключен к первому входу блока 59 вычисления арксинуса, выход которого является выходом блока 29 определения пеленга. Выход третьего регистра 41 подключен к второму входу первого вычитателя 44 и первому входу третьего вычитателя 54, второй вход которого подключен к выходу пятого регистра 43. Выход третьего вычитателя 54 подключен к первому входу четвертого умножителя 55, выход которого подключен к первому входу блока 56 вычисления синуса. Выход блока 56 подключен к первому входу пятого умножителя 57, выход которого подключен к второму входу делителя 53, а его второй вход подключен к выходу блока 58 вычисления синуса, второй вход которого подключен к выходу второго вычитателя 48. Выход четвертого регистра 42 подключен к второму входу второго вычитателя 48. Первые входы первого 39 и второго 40 регистров объединены и представляют собой первый вход блока 29 определения пеленга, первые входы третьего 41, четвертого 42 и пятого 43 регистров объединены и являются его вторым входом, а объединенные вторые входы первого 39, второго 40, третьего 41, четвертого 42, пятого 43 регистров, первого 45, третьего 49, четвертого 55 умножителей, блоков 46, 50 вычисления косинуса, блока 51 вычисления арккосинуса, блоков 52, 56, 58 вычисления синуса, блока 59 вычисления арксинуса, третьи входы вычитателей 44, 48, 54, второго 47 и пятого 57 умножителей, делителя 53 объединены и представляют третий (синхронизирующий) вход блока 29 определения пеленга.
Работает блок 29 определения пеленга следующим образом. На его первый вход - первый вход регистров 39, 40 с первого (координатного) выхода приемоиндикатора 1 поступают текущие координаты местоположения судна, соответственно текущая долгота λс и текущая широта ϕс. На его второй вход (первые входы регистров 41-43) с выхода блока 9 хранения координат точек опасности поступают значения координат точки опасности, соответственно ϕE и λE значение широты точки D - ϕD равное 90o. На его третий вход с второго (синхронизирующего) выхода приемоиндикатора 1 поступают синхроимпульсы, обеспечивающие временную диаграмму работы блока 29 определения пеленга. С выходов регистров 39 и 41 значения широт ϕc и ϕE поступают на первый и второй входы первого вычитателя 44 и далее на первый умножитель 45, в котором полученная разность ϕc-ϕE умножается на величину R, пропорциональную радиусу Земли. В результате на выходе умножителя 45 формируется сигнал, пропорциональный величине стороны ЕF треугольника CЕF (фиг.6), который с выхода умножителя 45 далее поступает на вход блока 46 вычисления cos ЕF и с его выхода на первый вход второго умножителя 47. С выходов регистров 40 и 42 значения долготы λc и λE поступают на первый и второй входы второго вычитателя 48 и далее на третий умножитель 49, в котором полученная разность λc-λEумножается на величину R, пропорциональную радиусу Земли. В результате на выходе умножителя 49 формируется сигнал, пропорциональный величине стороны CF треугольника СFЕ (фиг.6), который с выхода умножителя 49 поступает далее на вход блока 50 вычисления cos СF и с его выхода на второй вход второго умножителя 47, с выхода которого полученное произведение Х = сos ЕF cos СF поступает на вход блока 51 вычисления арккосинуса. С выхода блока 51 сигнал, пропорциональный значению arccos Х, поступает на вход блока 52 вычисления значения sin СЕ. Сформированный в блоке 52 сигнал, пропорциональный значению sin СЕ, c его выхода поступает на первый вход делителя 53, формирующий сигнал, пропорциональный значению
С выходов регистров 41, 43 значения широт ϕЕ и ϕD поступают на первый и второй входы третьего вычитателя 54, с выхода которого полученная разность ϕЕ - ϕD поступает на вход четвертого умножителя 55, в котором умножается на величину R, пропорциональную радиусу Земли. В результате на выходе умножителя 55 формируется сигнал, пропорциональный величине стороны DЕ cферического треугольника CDЕ (фиг.6), который с его выхода поступает на вход блока 56 вычисления sin DЕ. С выхода блока 56 сигнал, пропорциональный значению sin DЕ, поступает на первый вход пятого умножителя 57, на второй вход которого с выхода блока 58 вычисления синуса поступает сигнал, пропорциональный величине sin СDЕ. На вход блока 58 значения угла CDЕ (фиг.6), как разность двух долгот λc-λE поступает с выхода второго вычитателя 48. С выхода пятого умножителя 57 сигнал, пропорциональный произведению sin DЕ . sin CDЕ, поступает на второй вход делителя 53. В делителе 53 выполняется операция деления в виде
Y =  и c его выхода сигнал, пропорциональный этому частному, поступает на вход блока 59 вычисления arcsin Y, который представляет собой пеленг судна на точку Е опасности.
и c его выхода сигнал, пропорциональный этому частному, поступает на вход блока 59 вычисления arcsin Y, который представляет собой пеленг судна на точку Е опасности.
С выхода блока 28 определения путевого угла вычисленное значение путевого угла поступает на первый вход вычитателя 30, на второй вход которого с выхода блока 29 определения пеленга поступает вычисленное значение пеленга на ближайшую точку опасности Е. С выхода вычитателя 30 вычисленная разность
Δ ϕ = ПУ - П поступает на блок 31 определения значения sin Δ ϕ , c выхода которого вычисленное значение sin Δ ϕ поступает на первый вход умножителя 32, на второй вход которого поступает с выхода блока 7 определения расстояния вычисленное расстояние СЕ от судна до точки опасности Е.
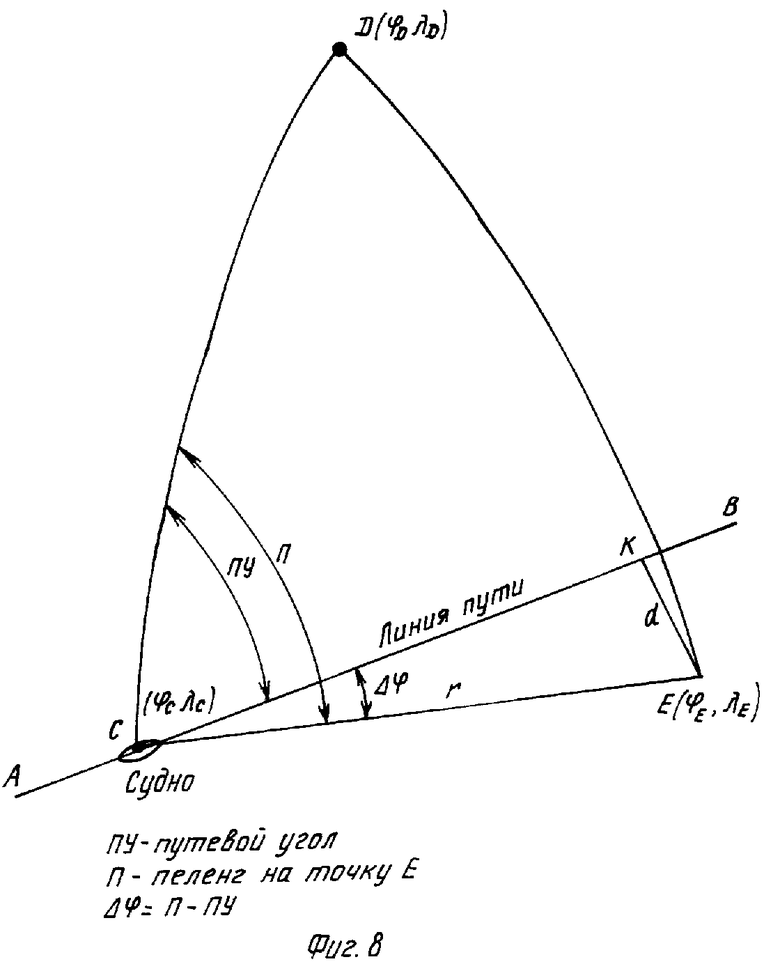
Определение траверса d осуществляется из прямоугольного треугольника СЕК (фиг.8):
d = CЕ sin Δ ϕ . При, этом если П - ПУ > 0, то точка опасности расположена справа по траверсу, если П-ПУ < 0, то точка опасности расположена слева по траверсу движения судна.
Вычисленное значение величины d траверса точки опасности поступает с выхода блока 8 на третий вход блока 5 команд управления, на первый вход которого поступает с выхода блока 3 определения пути торможения значение пути торможения Sт, cоответствующее варианту загрузки судна и скорости его движения, а на его второй вход с выхода блока 7 определения расстояния поступает величина расстояния до точки опасности.
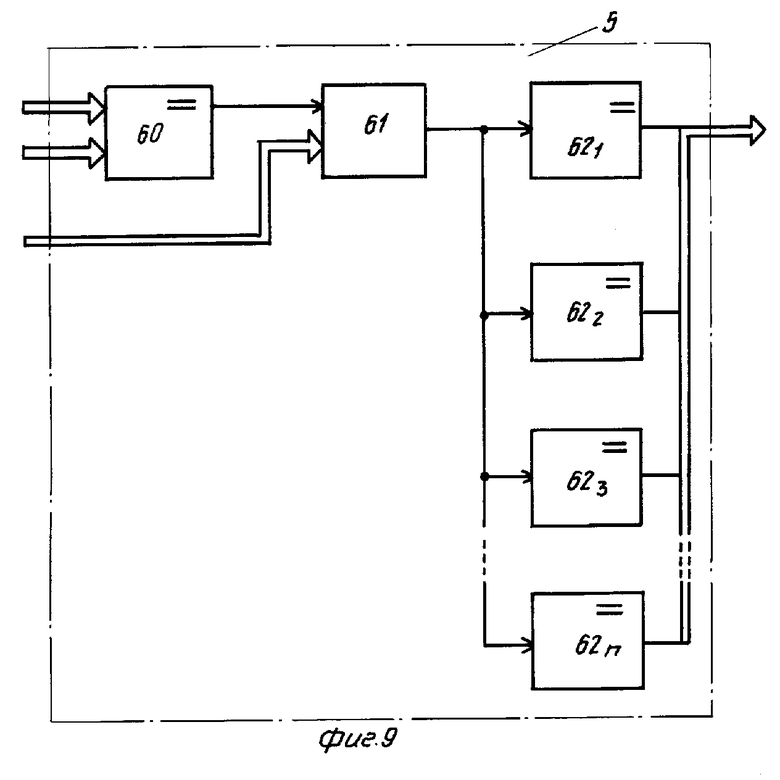
Блок 5 команд управления (фиг.9) содержит элемент 60 сравнения, элемент И 61, n пороговых элементов 62 (621...62n). Выход элемента 60 и сравнения подключен к первому входу элемента И 61, выход которого подключен к входам пороговых элементов 621...62n. Объединенные выходы последних являются выходом блока 5 команд управления, первым и вторым входами которого являются соответственно первый и второй входы элемента 60 сравнения, а его третьим входом является второй вход элемента И 61.
Работает блок 5 команд управления следующим образом. На первый вход (вход пути торможения) блока 5, т.е. на первый вход элемента 60 сравнения, поступает постоянно величина тормозного пути Sт судна для данного варианта загрузки и скорости его движения. На второй вход блока 5 (второй вход элемента 60) поступает значение расстояние r от судна до точки опасности Е (фиг. 8). На второй вход элемента И 61 поступает значение величины траверса d на точку опасности Е. На выходе элемента И 61 значение траверса d появляется только тогда, когда на его первый вход поступает сигнал с выхода элемента 60 сравнения. Это происходит в том случае, если величина тормозного пути Sт равна расстоянию r до точки опасности. В этом случае значение величины траверса поступает на входы пороговых элементов 621...62n. Каждый из этих пороговых элементов имеет фиксированный порог, соответствующий определенной величине траверса, от максимально-безопасного до траверса, равного нулю, т.е. когда точка опасности лежит на линии пути движения судна. Между этими крайними значениями может выбираться любое число значений траверса, в общем случае n.
Обозначают величины порогов элементов 621...62n через а1, а2...аn, при этом a1<а2<...<аn (а1=0, аn = d). Допускают, что величина траверса d равна а1 = 0. В этом случае срабатывает пороговый элемент 621 и на его выходе появляется сигнал, равный "1", в то время как на выходе остальных пороговых элементах 622...62n будет сигнал, равный "0". Если величина траверса d равна dбез, то срабатывают все пороговые элементы 621...62n и на их выходах будет сигнал, равный "1".
Таким образом, в зависимости от величины траверса на выходе блока 5 команд управления формируется сигнал в двоичном коде, имеющий различный (неповторимый) набор "1" и "0". Эти сигналы можно использовать для формирования различных команд движения судна. Например, когда d = 0, сигнал имеет вид 110203. . . 0n и может быть использован для формирования команды "полный назад". Эту комбинацию можно использовать для формирования команды поворота судна. Когда d = dбез, на выходе блока формируется сигнал вида 111213. . .1n. В этом случае судно продолжает режим движения без изменений. Сформированные сигналы могут быть использованы по-разному - могут быть просто выведены на дисплей в навигационном комплексе, на автоштурман и т.д.
Работает бортовое навигационное устройство следующим образом.
Перед рейсом определяются координаты точек опасности (малые глубины, банки, боны, молы и т.д.), расположенные в районе трассы следования судна, которые поочередно вводятся штурманом в блок хранения координат точек опасности по мере приближения к ближайшей из них при следовании судна по маршруту. Во время движения судна бортовое навигационное устройство с помощью приемоиндикатора 1 радионавигационной системы осуществляет поиск и обнаружение сигналов опорных радиомаяков радионавигационной системы, захват этих сигналов, измерение их частотно-временных параметров, выделение передаваемой по радиолинии информации и решение навигационной задачи - определение географических координат и вектора скорости движения судна. Со скоростного - третьего выхода приемоиндикатора 1 на первые входы вычитателя 2 и блока 3 определения пути торможения поступает значение скорости движения судна относительно Земли. Со скоростного входа устройства на третий вход вычитателя 2 поступает непрерывно значение скорости движения судна, вычисленное по ЛАГу. Образованная в вычитателе 2 разность между скоростью движения судна, определенная с помощью приемоиндикатора 1, и скоростью, определенной по ЛАГу, дает скорость течения воды, которая с выхода вычитателя 2 поступает на второй вход блока 3 определения пути торможения, в котором сформирована номограмма зависимости величины тормозного пути данного судна для различных вариантов его загрузки и скорости движения, полученная экспериментальным путем:
Sтп = f ( Qi , Vi) , где Qi - вариант загрузки судна;
Vi - скорость движения судна относительно воды.
При этом если точкой опасности является точка, жестко связанная с поверхностью Земли (мель, мол и т.д.), то для определения тормозного пути используется скорость движения судна относительно Земли, если речь идет о точке опасности, плавающей на поверхности воды, то скорость судна должна определяться относительно воды.
Сформированная в блоке 3 величина тормозного пути судна с его выхода поступает на вход блока 4 формирования радиуса опасности, в котором находится сумма D = 0,8 + 2Sтп, имеющая размерность в милях и представляющая собой радиус опасности судна, которая с его выхода поступает на второй вход порогового блока 6.
С первого (координатного) выхода приемоиндикатора 1 на первый вход блока 7 определения расстояния и второй вход блока 8 определения траверса поступают текущие координаты местоположения судна. На второй вход блока 7 определения расстояния и третий вход блока 8 определения траверса поступают координаты точки опасности. В блоке 7 определяется расстояние от судна до точки опасности из выражения
сos r = sin ϕc sin ϕi + cos ϕc cos ϕi cos (λi-λc) , где r - расстояние от судна до точки опасности;
ϕc, λc - географические координаты местоположения судна;
ϕi, λi - географические координаты точки опасности.
Вычисленное значение расстояния до точки опасности r поступает на первые входы порогового блока 6 и блока 8 определения траверса. Величина траверса d определяется из прямоугольного треугольника СЕК (фиг.8) по формуле
d = CЕ sin Δ ϕ = r sin Δ ϕ = r sin (ПУ-П).
Путевой угол в блоке 8 определения траверса определяется из выражения
ПУ = arctg  где Δ ϕk и Δ ϕk- приращение широты и долготы координат местоположения судна.
где Δ ϕk и Δ ϕk- приращение широты и долготы координат местоположения судна.
Пеленг в блоке 8 определения траверса, т.е. пеленг на точку опасности E, определяется как угол на сфере, заключенный между северным направлением меридиана и направлением на точку опасности. На фиг.6 представлен сферический треугольник CDЕ, где пеленг угла DCЕ образован линиями DC и СЕ. При этом положение точки С определяется текущими географическими координатами судна, положение точки D определяется координатой широты, равной 90o, и координатой долготы текущего местоположения судна, координаты точки Е опасности задаются заранее, перед плаванием, и хранятся в блоке 9 хранения координат точек опасности.
Значение пеленга - угол CDЕ - определяется из теоремы синусов: =
=  где DЕ, ЕС - стороны сферического треугольника CDЕ; углы DCЕ, CDЕ - углы сферического треугольника CDЕ.
где DЕ, ЕС - стороны сферического треугольника CDЕ; углы DCЕ, CDЕ - углы сферического треугольника CDЕ.
Значение пеленга - угол DCЕ - определяется из выражения
∠ DCE = arcsin 
В пороговом блоке 6 происходит сравнение тормозного пути судна Sтп ирасстояния r до точки опасности. Если r < Sтп, то на выходе порогового блока 6 появляется сигнал, характеризующий, что судно вошло в зону радиуса опасности и требуется повышенное внимание к его управлению.
С выхода блока 8 определения траверса значение вычисленного траверса поступает (постоянно) на третий вход блока 5 команд управления (второй вход элемента И 61), на первый вход которого (первый вход элемента 60 сравнения) с выхода блока 3 определения пути торможения поступает длина тормозного пути Sтп, а на его второй вход второй вход элемента 60 сравнения) с выхода блока 7 определения расстояния поступает расстояние до точки опасности (r). Блок 5 команд управления в зависимости от величины траверса формирует на выходе сигналы в двоичном коде, которые могут быть использованы для формирования различных команд движения судна.
Положительный эффект бортового навигационного устройства по сравнению с прототипом заключается в снижении аварийности и повышении безопасности движения судна за счет снижения роли человеческого фактора путем включения системы дублирования. Отличительной особенностью бортового навигационного устройства является то, что помимо основной информации об опасности судовождения, вырабатываемой автоматически, (т.е. сигнала нахождения в зоне опасности, команды управления движением судна, величины траверса) оно дает дополнительную информацию, которая может быть использована для оценки аварийности ситуации, а именно скорость течения, расстояние до точки опасности, координаты точки опасности. В устройстве имеется возможность вывода значения пеленга на точку опасности и путевого угла движения судна. В блок хранения координат точек опасности координаты точек опасности могут быть введены и с выхода радиолокационной станции. Таким образом, комплексная информация, вырабатываемая устройством, позволяет своевременно принимать правильные решения в аварийной обстановке с учетом всех действующих факторов.
Использование: в радионавигации для обеспечения безопасности судовождения в сложных навигационных условиях. Цель изобретения - обеспечение безопасности судовождения в сложных навигационных условиях. Сущность изобретения: устройство содержит приемоиндикатор 1 радионавигационной системы, вычитатель 2, блок 3 определения пути торможения, блок 4 формирования радиуса опасности, блок 5 команд управления, пороговый блок 6, блок определения расстояния, блок 8 определения траверса, блок 9 хранения координат точек опасности. 9 ил.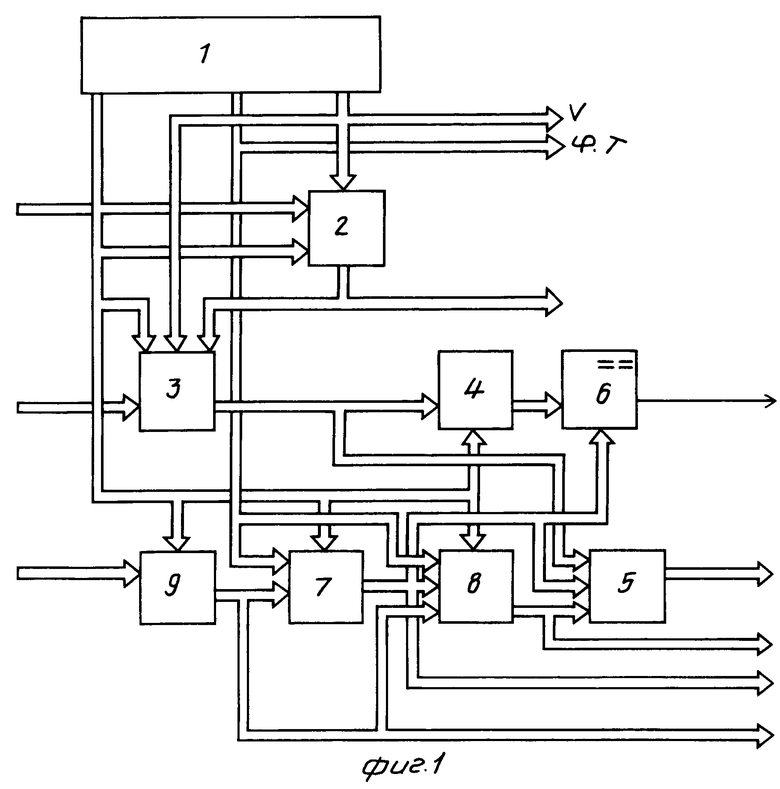
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ измерения времени распространения ультразвука | 1988 |
|
SU1578634A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
