Изобретение относится к обработке измерительной информации и может быть ис- пользованов геодезических трилатерационных системах для преобразования пространственных координат.
Цель изобретения - расширение класса решаемых задач за счет возможности определения пространственного положения точки во взаимной системе координат относительно трех опорных точек.
Предлагаемое устройство для преобразования координат позволяет осуществлять преобразования пространственных координат точки из заданной декартовой системы координат во взаимную декартову систему, определяемую в пространстве тремя опорными (с известными координатами) точками, и обратно и определение пространственного положения точки во взаимной системе координат по трем расстояниям до нее, измеренным относительно трех опорных (с известными координатами) точек.
Устройство для преобразования координат реализует алгоритм преобразования декартовых прямоугольных координат при одновременном переносе и повороте осей, где решения находятся по следующим формулам:
fX tiiX + ti2Y + ti3Z + Xi
JY t2lX + t22Y + t23Z + Yl(1) | Z t3lX + t32Y + t33Z + Zl
f X tn(X-Xi) + ti2(Y-Yi) + ti3(Z-Zi)
Y - tzi(X-Xi) + t22(Y-Yi) + t23(Z-Zi) (2)
Z t3l(X-Xi) + t32(Y-Yi) + t33(Z-Zi) или в векторной форме записи
00
о о
СП
ел
/О ti3(X2 - Xi) + t23(Y2 - Yi) + t33(Z2 - Zi)
(11) I 0 ti3(X3 - Xi) + t23(Y3 - Yi) + t33(Z3 - Zi).
Решая ее относительно мз и t23, имеем:
t13 t33 X
(Y2-Yl)(Z3-Zl)-(Y3-Yl)(Z2-Zl) (X2-X1J|(Y3-Y1)-(X3-X1 j(Y2-Yl)
(12)
t23 t33
.,(X3-Xi)(Z2-Zt)-(X2-Xi)(Z3-Zi) ЦХ2-Х1 j(Y3-Yl)-(X3-Xl)(Y2-Yl
(13)
В матричной форме записи система
5
0
0
5
Из (16), учитывая (22), определяются направляющие косинусы tis, t23.
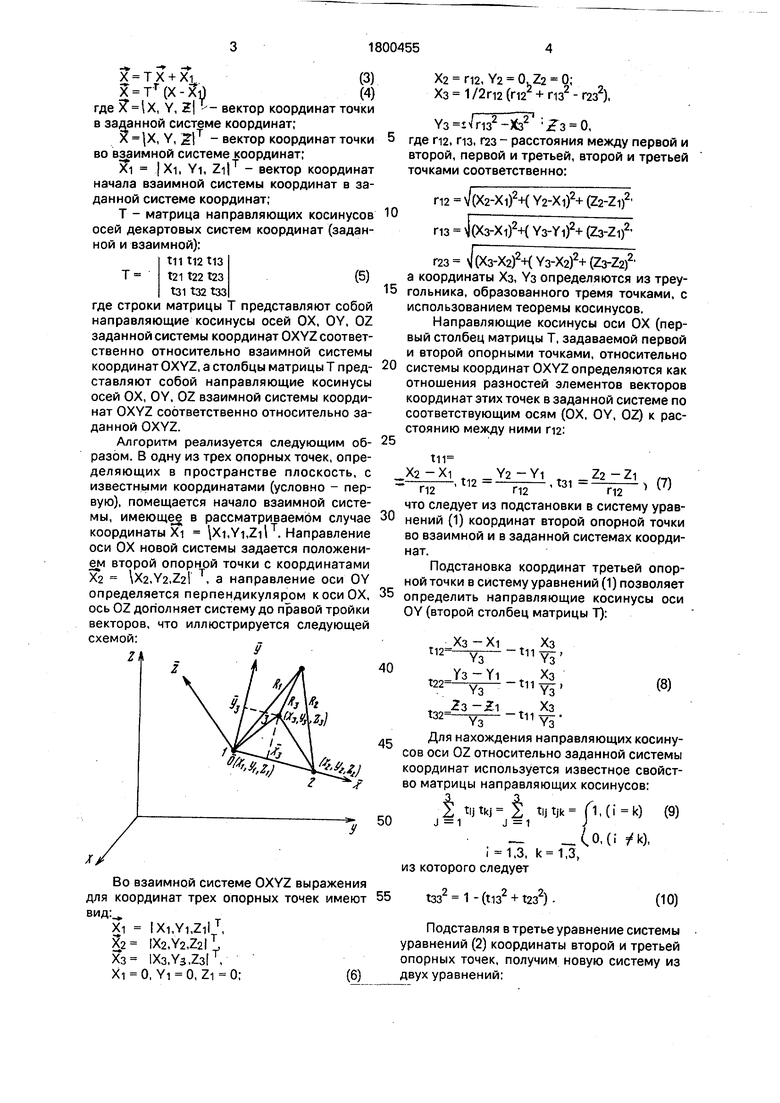
В настоящем алгоритме координата YS третьей опорной точки во взаимной системе координат OYXZ (см.выражение (6)) условно выбирается положительной, что однозначно определяет направление оси OY в пространстве. Направляющие косинусы tis, t23, 133 оси OZ взаимной системы координат имеют знаковую неопределенность (см.выражения (16), (22)), характеризующую неоднозначность ориентации оси OZ в пространстве. Для формирования правой тройки векторов системы OXYZ и устранения указанной неоднозначности в алгоритме используется известное свойство матрицы направляющих косинусов:
,.
где det Т tn t22 t23 + 121132 tis + ti2 t23 131 -t13 t22 t31 - t11 t32 t23 - t21 t12 t33 (23)
Знак элемента tss условно выбирается положительным и определяются значения элементов tis, t23. По формуле (23) вычисляется детерминант матрицы Т, с помощью которого производится операция коррекции знаков направляющих косинусов ш, t23, t33
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования координат | 1989 |
|
SU1681313A1 |
| Преобразователь координат | 1990 |
|
SU1742816A2 |
| Устройство для формирования изображения при коническом сканировании | 1989 |
|
SU1734233A1 |
| Устройство для вычисления координат | 1989 |
|
SU1635178A1 |
| Устройство для вычисления арктангенса | 1985 |
|
SU1314336A1 |
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ МАТРИЦЫ НАПРАВЛЯЮЩИХ КОСИНУСОВ | 1991 |
|
RU2037192C1 |
| Устройство для извлечения корня четвертой степени | 1985 |
|
SU1262487A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МОДУЛЯ ТРЕХМЕРНОГО ВЕКТОРА | 1993 |
|
RU2040039C1 |
| Устройство для нахождения оптимального вектора решения системы линейных неравенств | 1985 |
|
SU1315996A1 |
| ЦИФРОВОЙ ИНТЕГРАТОР | 1985 |
|
SU1351435A1 |
Изобретение относится к обработке измерительной информации и может быть использовано в геодезических трилатерационных системах для преобразования пространственных координат. Цель изобретения - расширение класса решаемых задач за счет возможности определения пространственного положения точки по системе координат относительно трех опорных точек. Поставленная цель достигается тем, что в известное устройство для преобразования координат дополнительно ведены пять квадраторов, три умножителя, пять сумматоров, четыре выключателя, с четвертого по шестой регистры, блок вычисления обратной величины и блок вычисления квадратного корня. Положительный эффект достигается за счет обеспечения возможности не только преобразования пространственных координат точки из заданной декартовой системы координат во взаимную декартову систему, определяемую в пространстве тремя опорными (с известными координатами) точками и обратно, но и определения пространственного положения точки во взаимной системе координат по трем расстояниям до нее, измеренным относительно трех опорных (с известными координатами) точек. 17 ил. 1 табл.
где
Р п - - 1 . II - r v НёгФ1 А2
Ai (Y/-YiXZ3-Zi)-(Y3-YiXZ2-Zi) (18) A2 (X3-XiXZ2-Zi)-(X2-XiXZ3-Zi) (19) 40 detO (X2 - Xi)(Y3 - Yi) - (X3 - XiXY2 - Yi)
(20) Тогда, используя (16):45
t132 +1232 - | tl312з| || t332 PT P. (21).
Подставляя (21) в (10), имеем:
t332 1 - ТЗЗ2 Т РТ
откуда
t33 ±V(1+PT-P)1 или
гзз ±(1 + rj )1
30
35
17)
tl3 t23 t33
t13 t23
tss
det Т
(24)
18) 19) 40 Yi)
истинные
в результате применения которой в предложенном алгоритме исключается возможность ошибочного знакоопределения элементов третьего столбца матрицы Т, задающих ориентацию оси OZ взаимной системы координат в трехмерном пространстве измерений.
Расстояния до точки, измеренные относительно трех опорных (с известными координатами) точек во взаимной системе координат, можно представить в виде:
Ri - V/(X-0)2+(Y-0)2+(Z-0)2, R2 N/(X-X2)2+(Y-0)2+(Z-0)2, R3 v/(X-X3)2+(Y-Y3)2+(Z-0)2,
(25)
где RI, R2, Rs - расстояния до точки, измеренные относительно первой, второй и третьей опорных точек соответственно. Определим координаты X, Y, Z точки во взаимной системе координат через измеренные расстояния Ri(i 1,3).
Возведем в квадрат первое и второе уравнения системы (25) и составим разность с учетом (6):
R22 - Ri2 (X - п2; П22 - 2ХП2. Отсюда
:)2 + Y2 + Z2-X2-Z2-Z2
Х
ri22+Ri2-R22 2 па
Аналогично составим разность с учетом (6) между третьим и первым уравнениями системы (25):
R32-R12 (X-X3)2 + (Y-Y3)2 + Z2-X2-Y2 - Z2 -2ХХз - 2YYs + пз2,
откуда
Yrb + R2 R3 - 2 XX.s
2Y3
СП)
Окончательно, используя первое уравнение системы (25) и (26), (27), получим:
.-Л
+VRi2-X2-Y2.
Знак величины Z определяется в зависимости от выбранной ориентации осей взаимной системы координат.
Положительный эффект достигается за счет введения в известное устройство отличительных признаков: пяти квадраторов, трех умножителей, пяти сумматоров, четырех вычитателей, блока вычисления обратной величины, блока вычисления квадратного корня, четвертого, пятого и шестого регистров. Следовательно, предлагаемое техническое решение обладает существенными отличиями. Новые элементы и связи между ними позволяют расши- рить функциональные возможности устройства для преобразования координат за счет возможности определения про- странственного положения точки во взаимной системе координат по трем расстояниям до нее, измеренным относительно трех опорных (с известными координатами) точек.
На фиг. 1 изображена схема предлагаемого устройства для преобразования коор- динат; на фиг. 2 - функциональная схема арифметического блока; на фиг. 3 - пример реализации блока управления; на фиг. 4 - функциональная схема блока формирования разностей; на фиг. 5 - функциональная схема блока вычисления направляющих косинусов первой координаты; на фиг. 6-функциональная схема блока вычисления направляющих косинусов второй координаты; на фиг. 7 - функциональная схема блока вычисления направляющих косинусов третьей координаты; на фиг. 8 - функциональная схема блока вычисления детерминанта; на фиг. 9 - структурная схема узла координат; на фиг. 10 - функциональная
10
15
20
25зо35. 4045§055
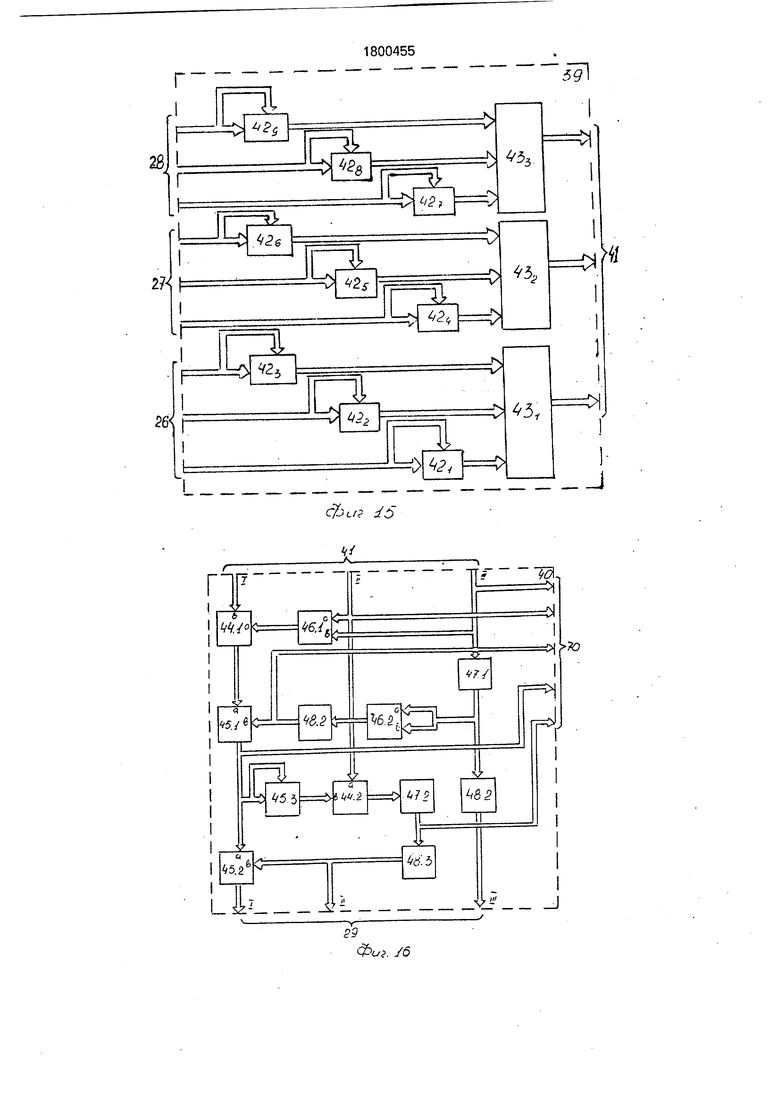
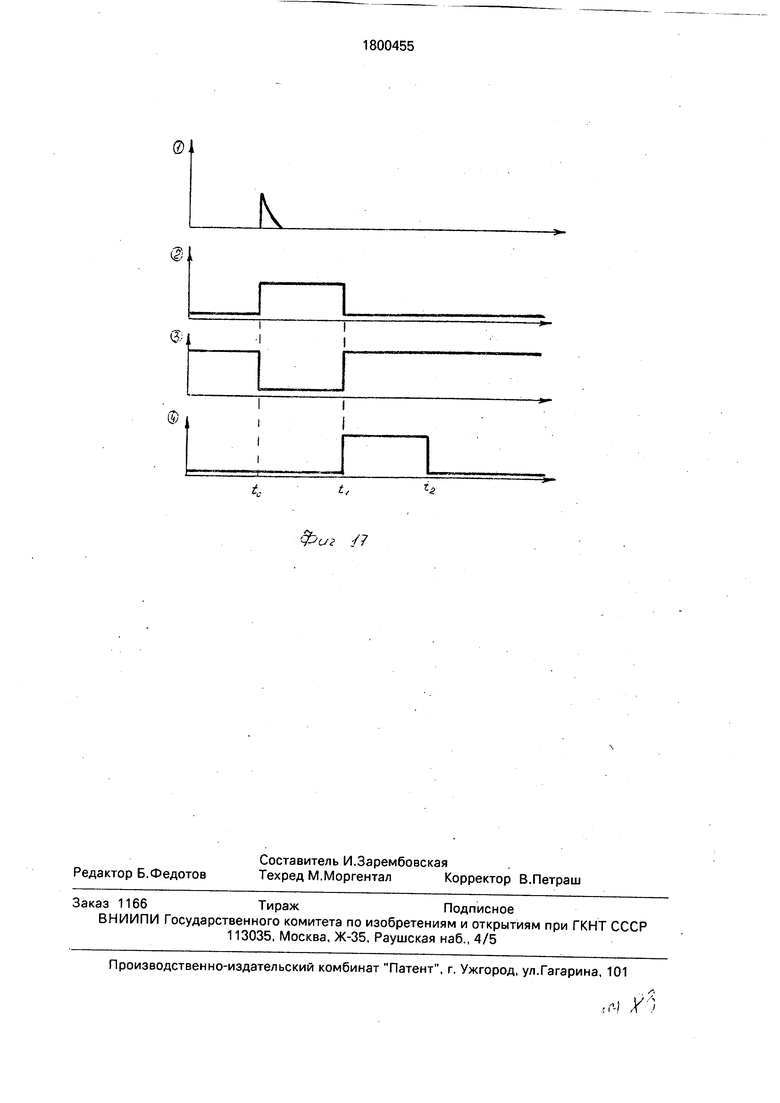
схема входного коммутатора; на фиг. 11 - функциональная схема блока формирования координат; на фиг. 12 - функциональная схема выходного коммутатора; на фиг. 13 - функциональная схема блока вычисления координат во взаимной системе; на фиг. 14 - структурная схема блока взаимных координат; на фиг. 15 - пример реализации блока квадратов; на фиг. 16 - функциоанльная схема блока предваритлеьных вычислений; на фиг. 17-временные диаграммы сигналов управления.
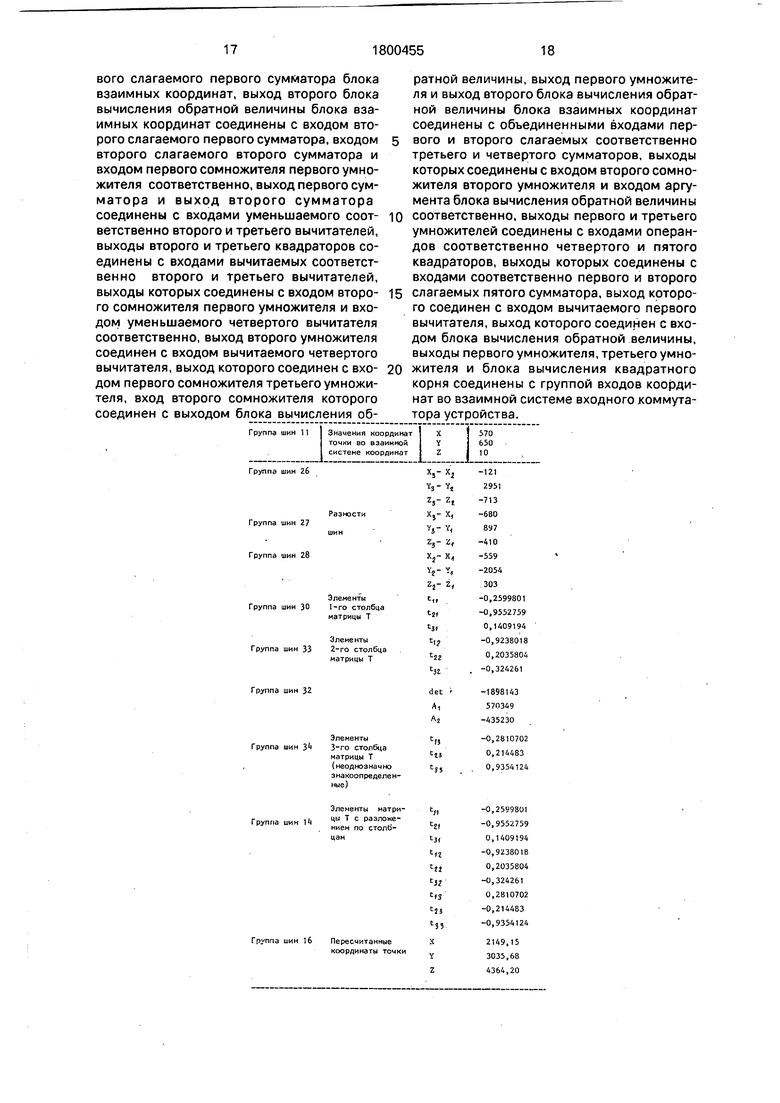
Устройство для преобразования координат (фиг.1) содержит шесть регистров 1i- 1б, блок 2 постоянной памяти, арифметический блок 3, блок 4 управления, узел 5 координат, ключ 6, блок 68 вычисления координат во взаимной системе, первую, вторую, третью и четвертую группы входов 7, 8, 9, 69 устройства соответственно первой, второй, третьей координат и измеренных расстояний, вход 10 константы, вход 11 координат во взаимной системе, вход 12 признака коммутации, вход 13 запуска, первую группу входов 14 узла 5 координат, третью группу входов 16 узла 5 координат, группу информационных входов 16 ключа 6, первый 17 и второй 18 выходы блока 4 управления, выход 19 результата устройства, вторую группу входов 70 блока 68 вычисления координат во взаимной системе, причем выходы 17, 18 блока 4 управления соединены с входами разрешения считывания шести регистров 1i-1e и входом разрешения ключа 6 соответственно, первый, второй и третий входы арифметического блока 3 через три регистра 1Нз соединены с первой 7, второй 8 и третьей 9 группами входных шин устройства, четвертый вход арифметического блока 3 соединен с выходом 10 блока 2 постоянной памяти, первая группа выходных шин 14 арифметического блока 3 соединена с первым входом узла 5 координат, второй вход 11 которого соединен с выходом блока 68 вычисления координат во взаимной системе, а третий вход 15 узла 5 координат через первый регистр 11 соединен с первой группой входов 7 устройства, первый вход блока 68 вычисления координат во взаимной системе через четвертый 14, пятый Is и шестой 1е регистры соединен с четвертой группой входов 69 устройства, второй вход блока 68 вычисления координат во взаимной системе соединен с второй группой выходных шин 70 арифметического блока, выход узла 5 координат через группу информационных входов 16 ключа 6 подключён к выходу 19 результата устройства.
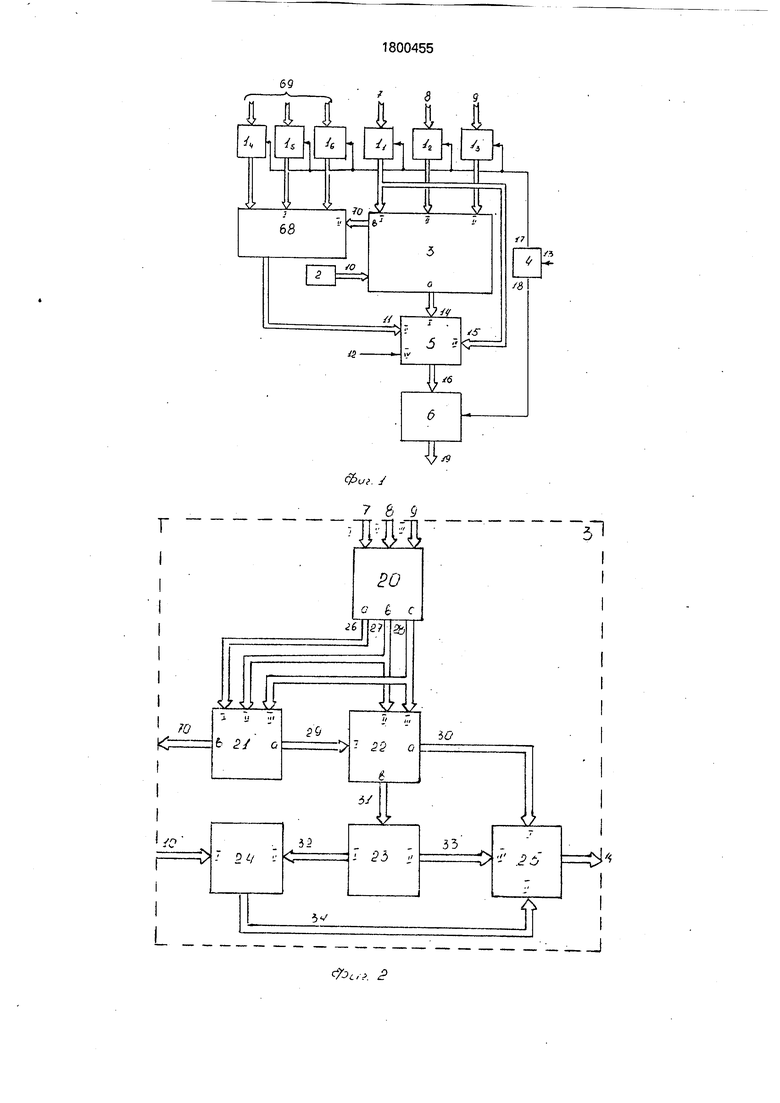
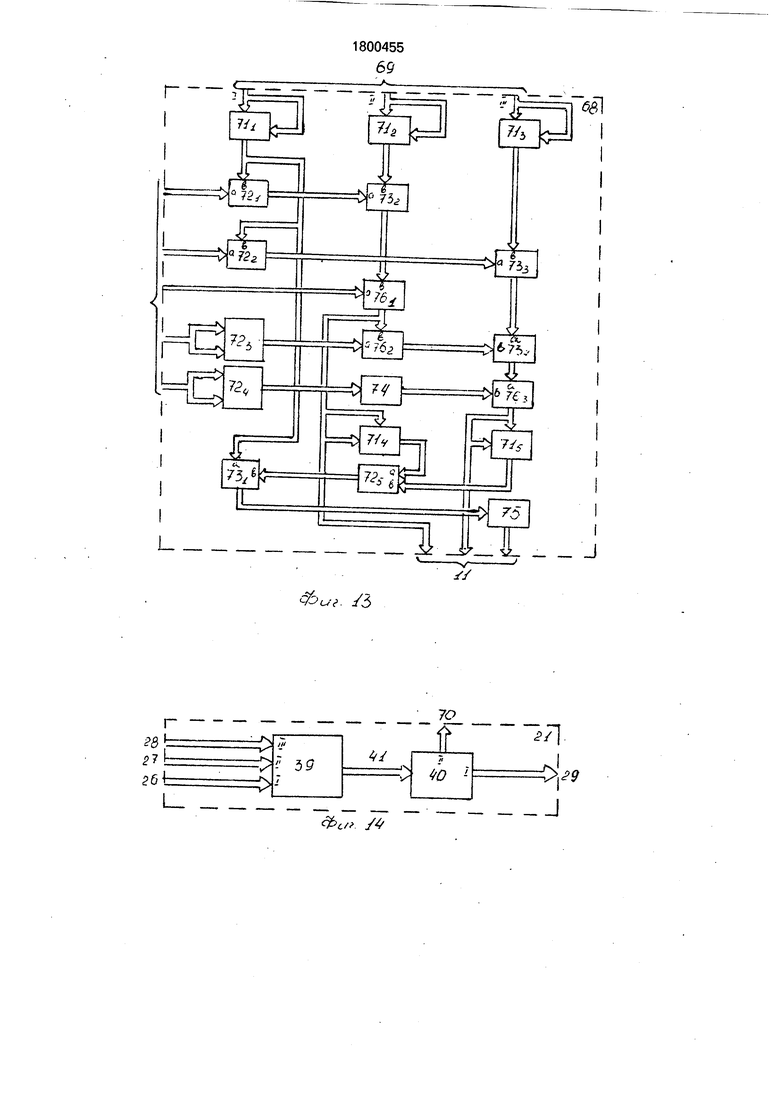
Арифметический блок (фиг.2) содержит блок 20 формирования разностей, блок 21
взаимных координат, блок 22 вычисления направляющих косинусов первой координаты, блок 23 вычисления направляющих косинусов второй координаты, блок 24 вычисления направляющих косинусов третьей координаты, блок 25 вычисления детерминанта, первую 26, вторую 27 и третью 28 группы выходов блока 20 формирования разностей, первую 29 и вторую 70 группы выходов блока 21 взаимных координат, первую 30 и вторую 31 группы выходов блока 22 вычисления направляющих косинусов первой координаты, первую 32 и вторую 33 группы выходов блика 23 вычисления направляющих косинусов второй координаты, группу выходов 34 блока 24 вычисления направляющих косинусов третьей координаты, причем первая 7, вторая 8 и третья 9 группы входных шин соединены с первым, вторым и третьим входами блока 20 формирования разностей, первая 26, вторая 27 и третья 28 группы выходов блока 20 формирования разностей соединены с первым, вторым и третьим входами блока 21 взаимных координат, первая 29 группа выходов которого соединена с первой группой входных шин блока 22 вычисления направляющих косинусов первой координаты, вторая 70 группа выходов блока 21 взаимных координат является второй группой выходных шин арифметического блока 3, вторая и третья группы входных шин блока 22 вычисления направляющих косинусов первой координаты соединена со второй 27 и третьей 28 группами выходов блока 20 формирования разностей, первая 30 группа выходов блока 22 вычисления направляющих косинусов первой координаты соединена с первым входом блока 25 вычисления детерминанта, а вторая группа 31 выходов соединена с входом блока 23 вычисления направляющих косинусов второй координаты, первая 32 группа выходов которого соединена со вторым входом блока 24 вычисления направляющих косинусов третьей координаты, второй вход которого является входом 10 константы, группа выходов 34 блока 24 вычисления направляющих косинусов третьей координаты соединена с вторым входом блока 25 вычисления детерминанта, третий вход которого соединен с второй 33 группой выходов блока 23 вычисления направляющих косинусов второй координаты, выход 14 блока 25 вычисления детерминанта образует первую группу выходных шин арифметического блока 3.
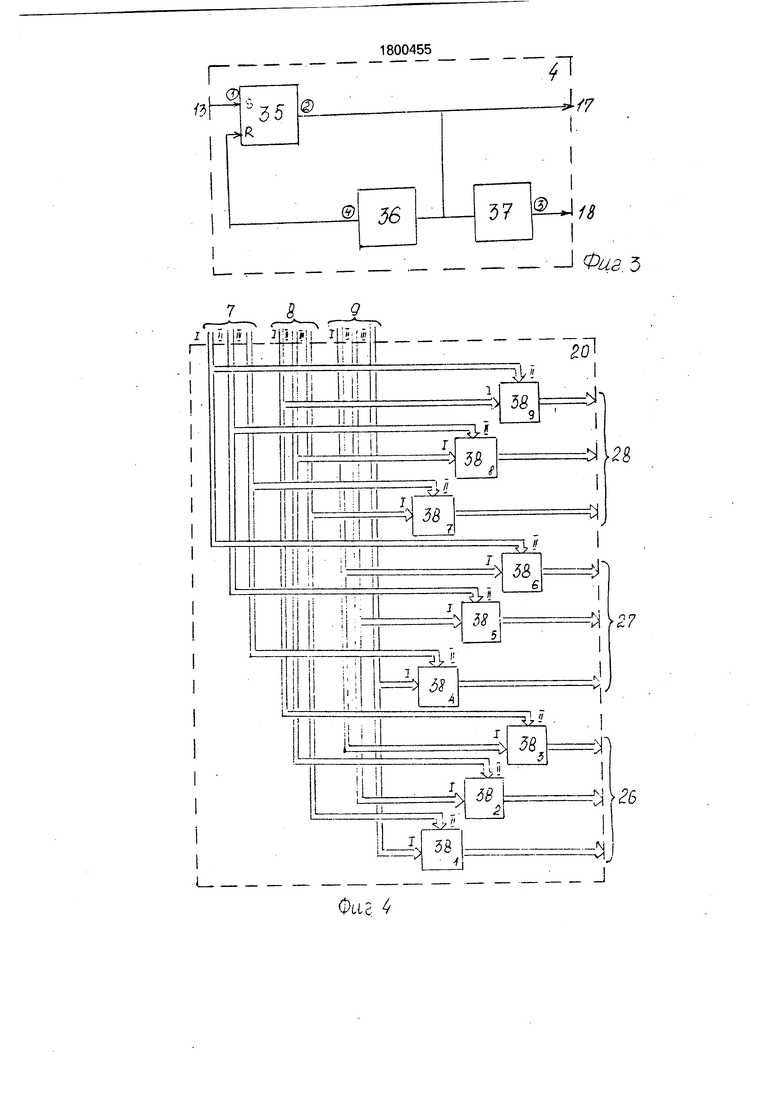
Блок 4 (фиг.З) управления содержит, например, триггер 35, элемент задержки 36 и элемент И-НЕ 37. Элементы блока 4 управления соединены по схеме, приведенной на фиг.З.
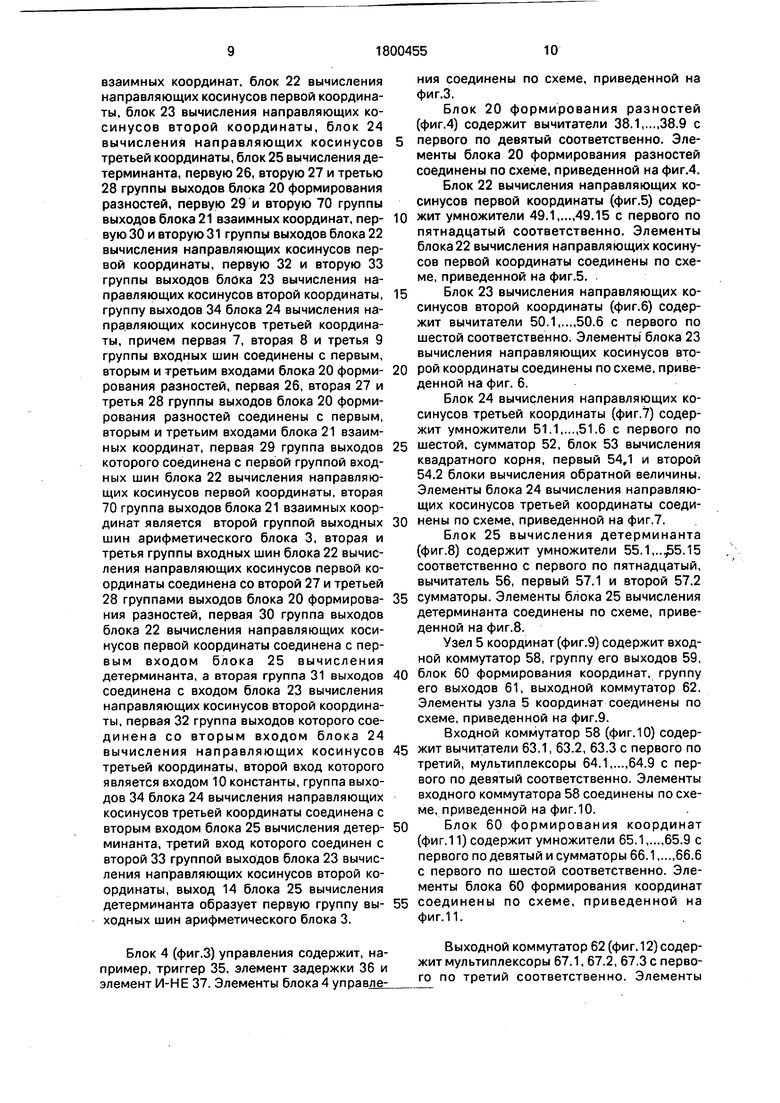
Блок 20 формирования разностей (фиг.4) содержит вычитатели 38.1,...,38.9 с
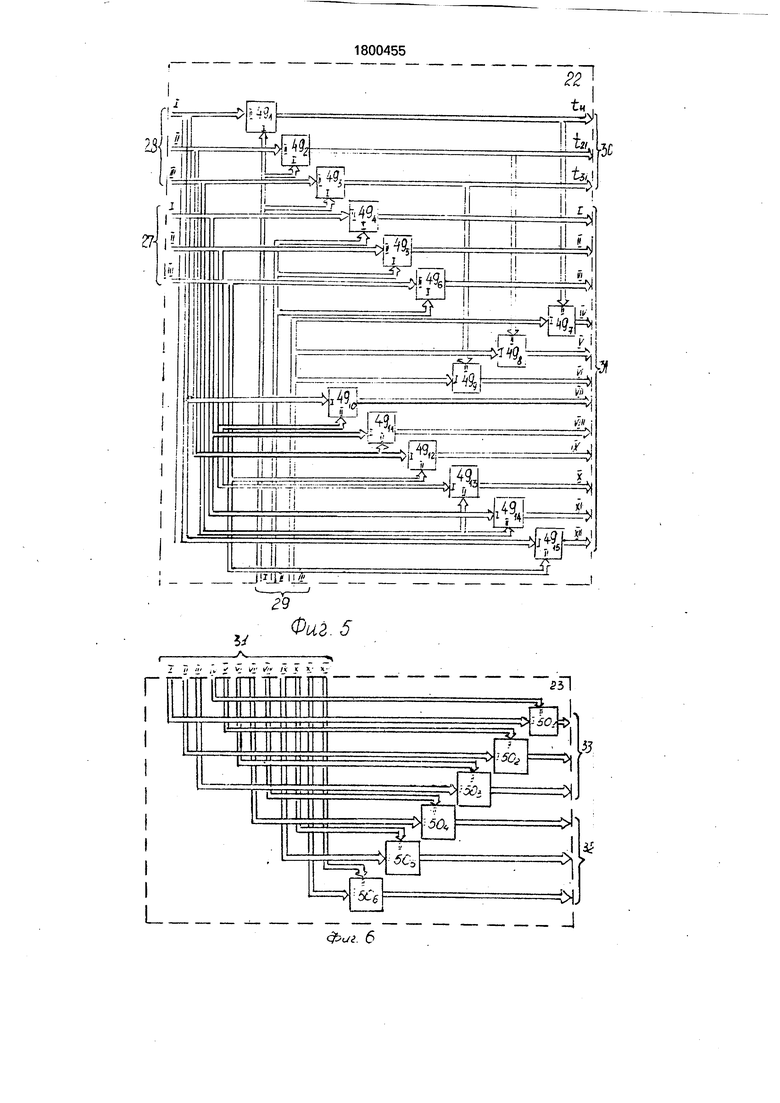
первого по девятый соответственно. Элементы блока 20 формирования разностей соединены по схеме, приведенной на фиг.4. Блок 22 вычисления направляющих косинусов первой координаты (фиг.5) содержит умножители 49.1.....49.15 с первого по пятнадцатый соответственно. Элементы блока22 вычисления направляющих косинусов первой координаты соединены по схеме, приведенной на фиг.5.
Блок 23 вычисления направляющих косинусов второй координаты (фиг.6) содержит вычитатели 50.1 ,...,50.6 с первого по шестой соответственно. Элементы блока 23 вычисления направляющих косинусов второй координаты соединены по схеме, приведенной на фиг. 6.
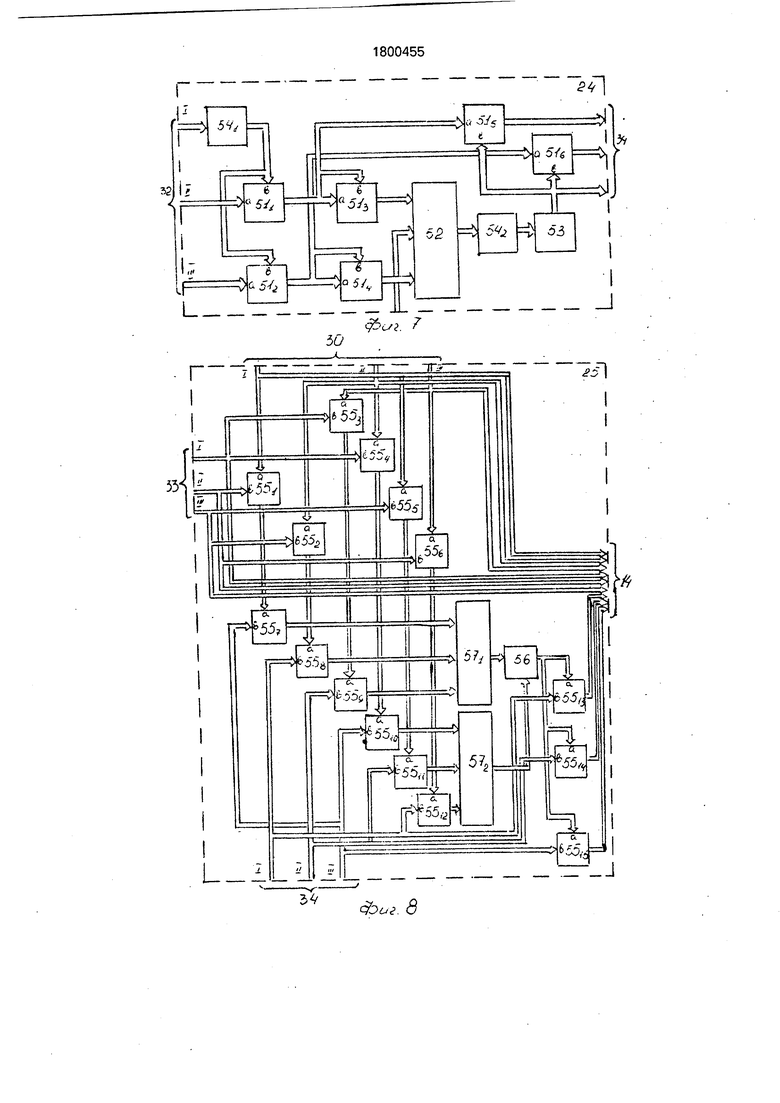
Блок 24 вычисления направляющих косинусов третьей координаты (фиг.7) содержит умножители 51.1,...,51.6 с первого по
шестой, сумматор 52, блок 53 вычисления квадратного корня, первый 54,1 и второй 54.2 блоки вычисления обратной величины. Элементы блока 24 вычисления направляющих косинусов третьей координаты соедийены по схеме, приведенной на фиг.7.
Блок 25 вычисления детерминанта (фиг.8) содержит умножители 55.1,...55.15 соответственно с первого по пятнадцатый, вычитатель 56, первый 57.1 и второй 57.2
сумматоры. Элементы блока 25 вычисления детерминанта соединены по схеме, приведенной на фиг.З.
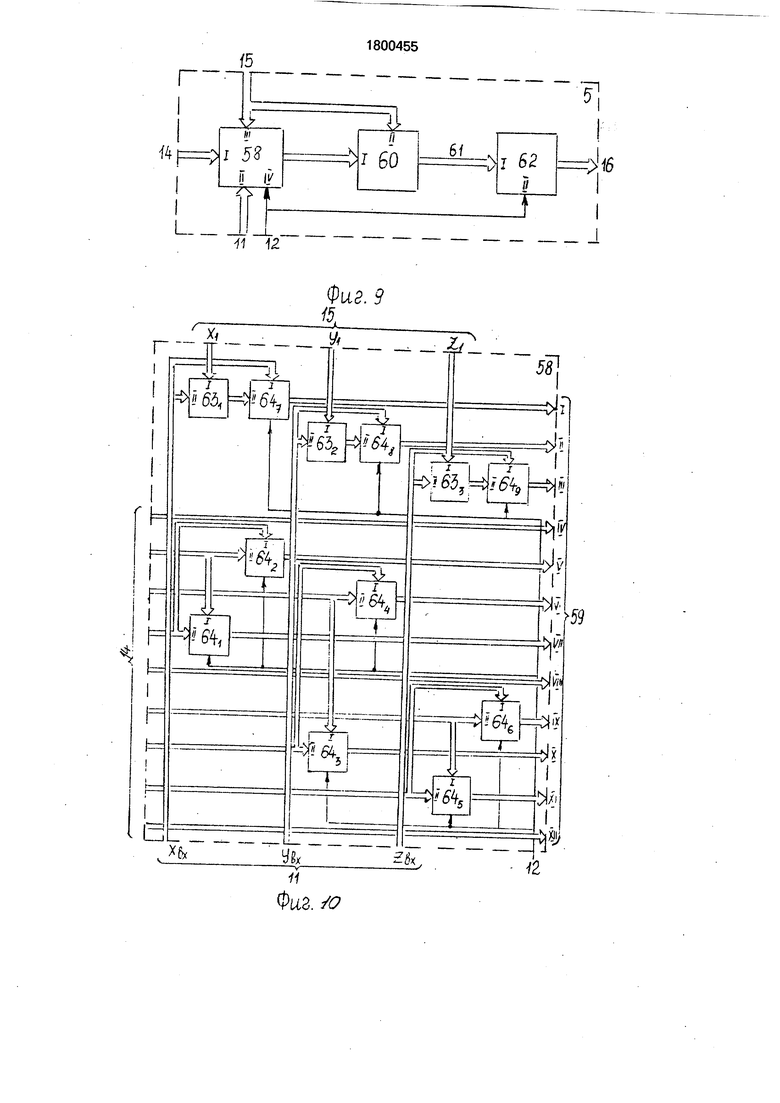
Узел 5 координат (фиг.9) содержит входной коммутатор 58, группу его выходов 59,
блок 60 формирования координат, группу его выходов 61, выходной коммутатор 62. Элементы узла 5 координат соединены по схеме, приведенной на фиг.9.
Входной коммутатор 58 (фиг. 10) содержит вычитатели 63.1, 63.2, 63.3 с первого по третий, мультиплексоры 64.1,...,64.9 с первого по девятый соответственно. Элементы входного коммутатора 58 соединены по схеме, приведенной на фиг.10.
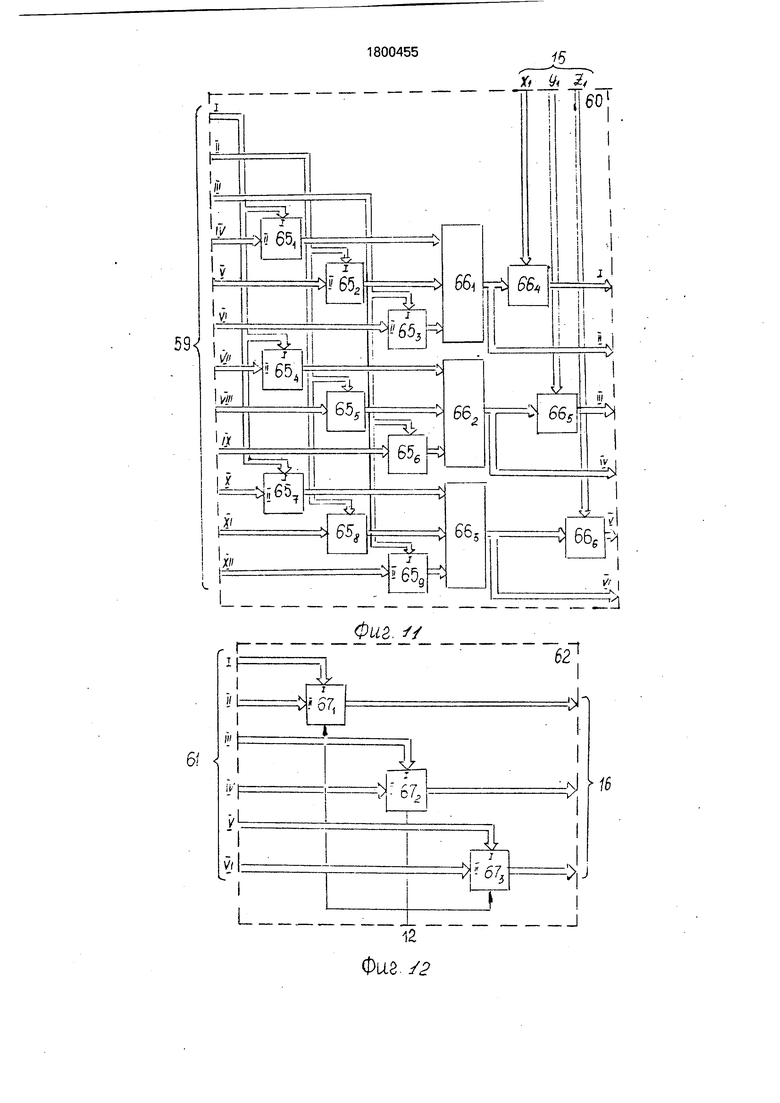
Блок 60 формирования координат (фиг.11) содержит умножители 65.1,...,65.9 с первого по девятый и сумматоры 66.1,...,66.6 с первого по шестой соответственно. Элементы блока 60 формирования координат
соединены по схеме, приведенной на фиг.11.
Выходной коммутатор 62 (фиг. 12) содержит мультиплексор ы 67.1, 67.2, 67.3с первого по третий соответственно. Элементы
111800455 12
выходного коммутатора 62 соединены по первого сомножителя третьего 76.3 умножи- схеме, приведенной на фиг.12.теля ВЫХ°Д блока 74 вычисления обратной
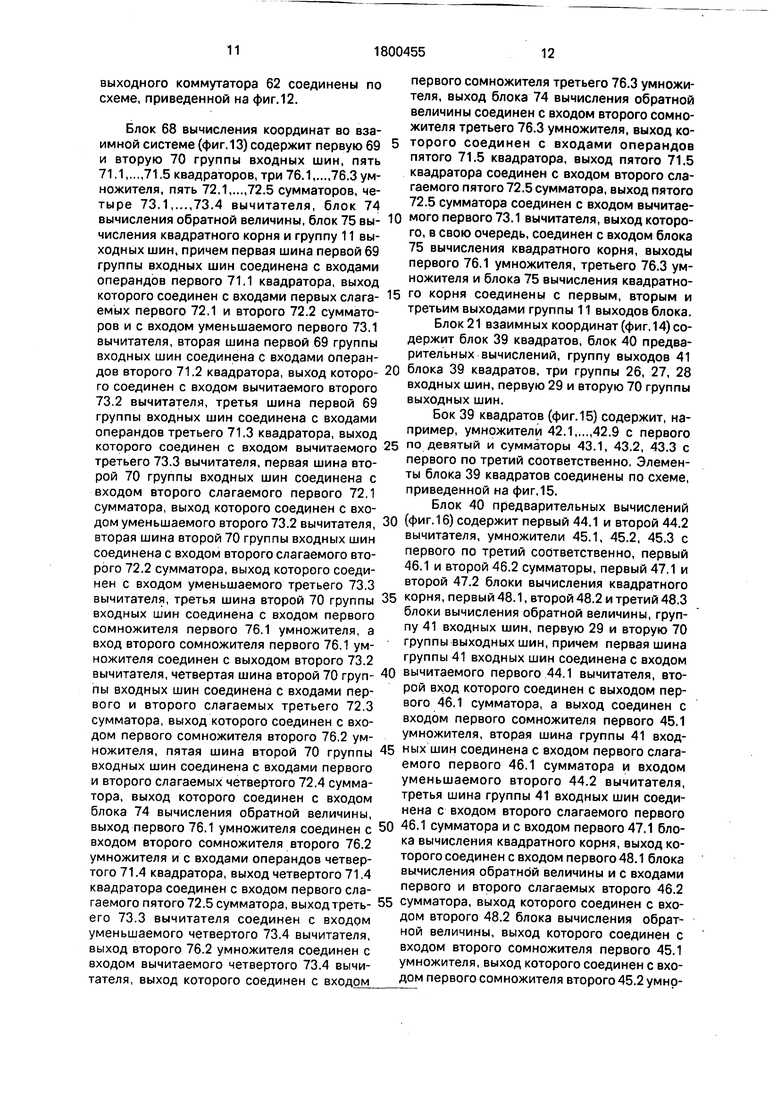
величины соединен с входом второго сомноБлок 68 вычисления координат во вза- жителя третьего 76.3 умножителя, выход ко- имной системе (фиг. 13) содержит первую 69 5 торого соединен с входами операндов и вторую 70 группы входных шин, пять пятого 71.5 квадратора, выход пятого 71.5 71 1 ,71.5 квадраторов, три 76.1,...,76.3 ум- квадратора соединен с входом второго сла- ножителя, пять 72.1,...,72.5 сумматоров, че- гаемого пятого 72.5 сумматора, выход пятого тыре 73.1 ...,73.4 вычитателя, блок 74 72.5 сумматора соединен с входом вычитае- вычисления обратной величины, блок 75 вы- 10 м°г° первого 73.1 вычитателя, выход которо- числения квадратного корня и группу 11 вы- го- в свою очередь, соединен с входом блока ходных шин, причем первая шина первой 69 75 вычисления квадратного корня, выходы группы входных шин соединена с входами первого 76.1 умножителя, третьего 76.3 ум- операндов первого 71.1 квадратора, выход ножителя и блока 75 вычисления квадратно- которого соединен с входами первых слага- 15 г° корня соединены с первым, вторым и емых первого 72.1 и второго 72.2 суммато- третьим выходами группы 11 выходов блока, ров и с входом уменьшаемого первого 73.1Блок 21 взаимных координат (фиг. 14) со- вычитателя, вторая шина первой 69 группы держит блок 39 квадратов, блок 40 предва- входных шин соединена с входами операн- рительных.вычислений, группу выходов 41 дов второго 71.2 квадратора, выход которо- 20 блока 39 квадратов, три группы 26, 27, 28 го соединен с входом вычитаемого второго входных шин, первую 29 и вторую 70 группы 73.2 вычитателя, третья шина первой 69 выходных шин.
группы входных шин соединена с входамиБок 39 квадратов (фиг. 15) содержит, на- операндов третьего 71.3 квадратора, выход пример, умножители 42.1,...,42.9 с первого которого соединен с входом вычитаемого 25 по девятый и сумматоры 43.1, 43.2, 43.3 с третьего 73.3 вычитателя, первая шина вто- первого по третий соответственно. Элемен- рой 70 группы входных шин соединена с ты блока 39 квадратов соединены по схеме, входом второго слагаемого первого 72.1 приведенной на фиг. 15. сумматора, выход которого соединен с вхо- , Блок 40 предварительных вычислений дом уменьшаемого второго 73.2 вычитателя, 30 (фиг. 16) содержит первый 44.1 и второй 44.2 вторая шина второй 70 группы входных шин вычитателя, умножители 45.1, 45.2, 45.3 с соединена с входом второго слагаемого вто- первого по третий соответственно, первый рого 72.2 сумматора, выход которого соеди- 46-1 и ВТ°Р°Й 46-2 сумматоры, первый 47.1 и нен с входом уменьшаемого третьего 73.3 второй 47.2 блоки вычисления квадратного вычитателя, третья шина второй 70 группы 35 корня, первый 48.1, второй 48.2 и третий 48.3 входных шин соединена с входом первого блоки вычисления обратной величины, груп- сомножителя первого 76,1 умножителя, а ПУ 41 входных шин, первую 29 и вторую 70 вход второго сомножителя первого 76.1 ум- группы выходных шин, причем первая шина ножителя соединен с выходом второго 73.2 ГРУППЫ 41 входных шин соединена с входом вычитателя, четвертая шина второй 70 труп- 40 вычитаемого первого 44.1 вычитателя, вто- пы входных шин соединена с входами пер- Р°й ВХ-°Д которого соединен с выходом первого и второго слагаемых третьего 72.3 вого 46.1 сумматора, а выход соединен с сумматора, выход которого соединен с вхо- входом первого сомножителя первого 45.1 дом первого сомножителя второго 76.2 ум- умножителя, вторая шина группы 41 вход- ножителя, пятая шина второй 70 группы 45 ных шин соединена с входом первого слага- входных шин соединена с входами первого емого первого 46.1 сумматора и входом и второго слагаемых четвертого 72.4 сумма- уменьшаемого второго 44.2 вычитателя, тора, выход которого соединен с входом тРетья шина группы 41 входных шин соеди- блока 74 вычисления обратной величины, нена с входом второго слагаемого первого выход первого 76.1 умножителя соединен с 50 46.1 сумматора и с входом первого 47.1 бло- входом второго сомножителя второго 76.2 ка вычисления квадратного корня, выход ко- умножителя и с входами операндов четвер- торого соединен с входом первого 48.1 блока того 71.4 квадратора, выход четвертого 71.4 вычисления обратной величины и с входами квадратора соединен с входом первого ела- первого и второго слагаемых второго 46.2 гаемого пятого 72.5 сумматора, выход треть- 55 сумматора, выход которого соединен с вхо- его 73.3 вычитателя соединен с входом Д°м второго 48.2 блока вычисления обрат- уменьшаемого четвертого 73.4 вычитателя, ной величины, выход которого соединен с выход второго 76.2 умножителя соединен с входом второго сомножителя первого 45.1 входом вычитаемого четвертого 73.4 вычи- умножителя, выход которого соединен с вхо- тателя, выход которого соединен с входом дом первого сомножителя второго 45.2 умно131800455 14
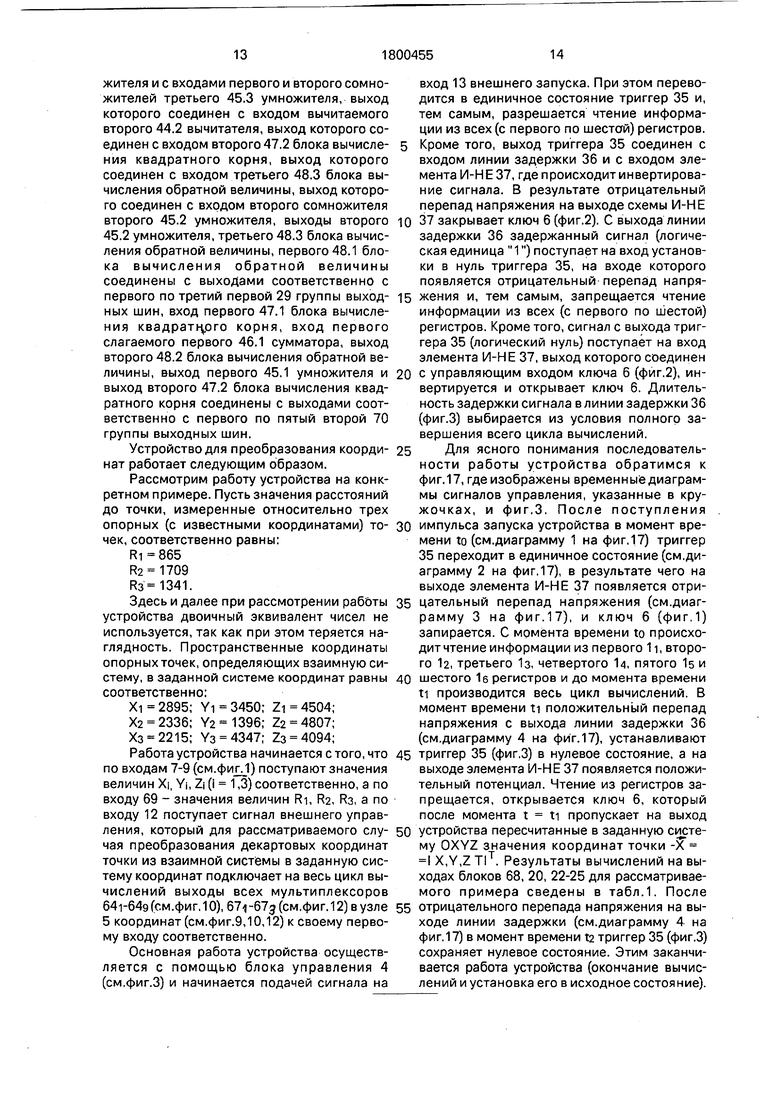
жителя и с входами первого и второго сомно-вход 13 внешнего запуска. При этом перево- жителей третьего 45.3 умножителя, выходдится в единичное состояние триггер 35 и, которого соединен с входом вычитаемоготем самым, разрешается чтение информа- второго 44.2 вычитателя, выход которого со-ции из всех (с первого по шестой) регистров, единен с входом второго 47.2 блока вычисле-5 Кроме того, выход триггера 35 соединен с ния квадратного корня, выход котороговходом линии задержки 36 и с входом эле- соединен с входом третьего 48.3 блока вы-мента И-НЕ 37, где происходитинвертирова- числения обратной величины, выход которо-ние сигнала. В результате отрицательный го соединен с входом второго сомножителяперепад напряжения на выходе схемы И-НЕ второго 45.2 умножителя, выходы второгою 37 закрывает ключ 6 (фиг.2). С выхода линии 45.2 умножителя, третьего 48.3 блока вычис-задержки 36 задержанный сигнал (логиче- ления обратной величины, первого 48.1 бло-екая единица 1) поступает на вход установка вычисления обратной величиныки в нуль триггера 35, на входе которого соединены с выходами соответственно споявляется отрицательный перепад напря- первого по третий первой 29 группы выход-15 жения и, тем самым, запрещается чтение ных шин, вход первого 47.1 блока вычисле-информации из всех (с первого по шестой) ния квадратцрго корня, вход первогорегистров. Кроме того, сигнал с выхода триг- слагаемого первого 46.1 сумматора, выходгера 35 (логический нуль) поступает на вход второго 48.2 блока вычисления обратной ве-элемента И-НЕ 37, выход которого соединен личины, выход первого 45.1 умножителя и20 с управляющим входом ключа 6 (фиг.2), ин- выход второго 47.2 блока вычисления квад-вертируется и открывает ключ 6. Длитель- ратного корня соединены с выходами соот-ность задержки сигнала в линии задержки 36 ветственно с первого по пятый второй 70(фиг.З) выбирается из условия полного за- группы выходных шин.вершения всего цикла вычислений.
Устройство для преобразования коорди-25 Для ясного понимания последователь- нат работает следующим образом.ности работы устройства обратимся к Рассмотрим работу устройства на конк-фиг.17, где изображены временные диаграм- ретном примере. Пусть значения расстояниймы сигналов управления, указанные в кру- до точки, измеренные относительно трехжочках, и фиг.З. После поступления опорных (с известными координатами) то-30 импульса запуска устройства в момент вре- чек, соответственно равны:мени to (см.диаграмму 1 на фиг.17) триггер RI 86535 переходит в единичное состояние (см.ди- R2 1709аграмму 2 на фиг.17), в результате чего на Рз 1341.выходе элемента И-НЕ 37 появляется отри- Здесь и далее при рассмотрении работы35 цательный перепад напряжения (см.диаг- устройства двоичный эквивалент чисел нерамму 3 на фиг.17), и ключ 6 (фиг.1) используется, так как при этом теряется на-запирается. С момента времени to происхо- глядность. Пространственные координатыдитчтение информации из первого 11, второ- опорныхточек, определяющих взаимную си-го 12, третьего 1з, четвертого 14, пятого 1s и стему, в заданной системе координат равны40 шестого 1е регистров и до момента времени соответственно:И производится весь цикл вычислений. В Xi 2895; Yi 3450; Zi 4504;момент времени ti положительный перепад Х2 2336; Y2 1396; Z2 4807;напряжения с выхода линии задержки 36 Хз 2215; Уз 4347; 7з 4094;(см.диаграмму 4 на фиг.17), устанавливают Работа устройства начинается с того, что45 триггер 35 (фиг.З) в нулевое состояние, а на по входам 7-9 (см.фиг/1) поступают значениявыходе элемента И-НЕ 37 появляется положи- величин Xi, YJ, Zi(i 1,3) соответствен но, а потельный потенциал. Чтение из регистров за- входу 69 - значения величин RI, R2, R3, а попрещается, открывается ключ 6, который входу 12 поступает сигнал внешнего управ-после момента t ti пропускает на выход ления, который для рассматриваемого слу-50 устройства пересчитанные в заданную систе- чая преобразования декартовых координатму OXYZ значения координат точки -X точки из взаимной системы в заданную сие- l X,Y,Z TIT. Результаты вычислений на вы- тему координат подключает на весь цикл вы-ходах блоков 68, 20, 22-25 для рассматривае- числений выходы всех мультиплексоровмого примера сведены в табл.1. После 641-649(см.фиг,10), (см.фиг.12)вузле55 отрицательного перепада напряжения на вы- 5 координат (см.фиг.9,10,12) к своему перво-ходе линии задержки (см.диаграмму 4 на му входу соответственно.фиг.17) в момент времени t2 триггер 35 (фиг.З) Основная работа устройства осуществ-сохраняет нулевое состояние. Этим заканчи- ляется с помощью блока управления 4вается работа устройства (окончание вычис- (см.фиг.З) и начинается подачей сигнала налений и установка его в исходное состояние).
151800455 16
Все элементы, входящие в состав уст- направляющих косинусов третьей координа- ройства, могут быть выполнены на стандар- ты, группа выходов которого соединена с тных элементах средств автоматики и второй группой входов блока вычисления де- вычислительной техники, например, эле- терминанта, третья группа входов которого мент сумматор - на микросхемах К533ИМ6, 5 соединена с второй группой выходов блока элемент умножитель - на микросхемах вычисления направляющих косинусов вто- 1802ВР2, мультиплексор - К533КП16 (см. рой координаты, группа выходов блока вы- ОСТ 11340. 917-84).числения детерминанта соединена с первой
Технико-экономическими преимущест- группой информационных входов входного вами описанного технического решения яв- ю коммутатора, вторая группа информацион- ляется то, что в результате введения ных входов которого соединена с входом ко- отличительных признаков расширен класс ординат во взаимной системе устройства, решаемых устройством задач, а именно третья группа информационных входов обеспечена возможность не только преобра- входного коммутатора соединена с входом зования пространственных координат точки 15 первого регистра и второй группами входов из заданной декартовой системы координат блока формирования координат, группа вы- во взаимную декартову систему, определяв- ходов которого соединена р группой инфор- мую в пространстве тремя опорными (с изве- мационных входов выходного коммутатора, стными координатами) точками, и обратно, группа выходов которого соединена с груп- но и определения пространственного поло- 20 пой информационных входов ключа, выход жения точки во взаимной системе координат которого является выходом результата уст- по трем расстояниям до нее, измеренным ройства, вход константы которого соединен относительно трех опорных (с известными с второй группой входов блока вычисления координатами) точек.направляющих косинусов третьей координаФормулаизобретения25 ты вход запуска и признака коммутации
Устройство для преобразования коорди- устройства соединены соответственно с вхо- нат, содержащее три регистра, входной ком- дом запуска блока управления и управляю- мутатор, выходной коммутатор, блок щими входами входного и выходного формирования координат, блок формирова- коммутаторов, первый и второй выходы бло- ния разностей, блок взаимных координат, 30 ка управления соединены с входами разре- блоки вычисления направляющих косинусов шения считывания регистров с первого по первой, второй и третьей координат соответ- третий и входом разрешения ключа соответственно, блок вычисления детерминанта, ственно, группа выходов входного коммута- ключ и блок управления, причем группа вхо- тора соединена с первой группой входов дов первой координаты, группа входов вто- 35 блока формирования координат, отл ича горой координаты и группа входов третьей щее с я тем, что, с целью расширения класса координаты устройства соединены с инфор- решаемых задач за счет возможности опре- мационными входами соответственно пер- деления пространственного положения точ- вого, второго и третьего регистров, выходы ки во взаимной системе координат которых соединены соответственно с пер- 40 относительно трех опорных точек, в него вве- вой, второй и третьей группами входов блока дены пять квадраторов, три умножителя, формирования разностей, первая, вторая и пять сумматоров, четыре вычитателя, блок третья группы выходов которого соединены вычисления обратной величины, блок вычис- соответственно с первой, второй, третьей ления квадратного корня и четвертый, пятый группами входов блока взаимных координат, 45 и шестой регистры, причем входы расстоя- группа выходов которого соединена с пер- ний относительно первой, второй и третьей вой группой входов блока вычисления на- опорных точек устройства соединены с ин- правляющих косинусов первой координаты, формационными входами соответственно вторая и третья группы входов которого сое- четвертого, пятого и шестого регистров, вхо- динены соответственно с второй и третьей 50 Ды разрешения считывания которых соеди- группами выходов блока формирования раз- нены с первым тактовым выходом блока ностей, первая и вторая группы выходов бло- управления, выходы четвертого, пятого и ше- ка вычисления направляющих косинусов стого регистров соединены с входами опера- первой координаты соединены с первыми торов соответственно первого, второго и группами входов блока вычисления детерми- 55 третьего квадраторов, выход первого квад- нанта и блока вычисления направляющих ко- ратора соединен с входами первых слагае- синусов второй координаты соответственно, мых первого и второго сумматоров и с первый выход блока вычисления направляю- входом уменьшаемого первого вычитателя, щих косинусов второй координаты соединен вход первого блока вычисления квадратного с первой группой входов блока вычисления корня блока взаимных координат, вход первого слагаемого первого сумматора блока взаимных координат, выход второго блока вычисления обратной величины блока взаимных координат соединены с входом второго слагаемого первого сумматора, входом второго слагаемого второго сумматора и входом первого сомножителя первого умножителя соответственно, выход первого сум- матора и выход второго сумматора соединены с входами уменьшаемого соответственно второго и третьего вычитателей, выходы второго и третьего квадраторов соединены с входами вычитаемых соответственно второго и третьего вычитателей, выходы которых соединены с входом второго сомножителя первого умножителя и входом уменьшаемого четвертого вычитателя соответственно, выход второго умножителя соединен с входом вычитаемого четвертого вычитателя, выход которого соединен с входом первого сомножителя третьего умножителя, вход второго сомножителя которого соединен с выходом блока вычисления обратной величины, выход первого умножителя и выход второго блока вычисления обратной величины блока взаимных координат соединены с объединенными входами первого и второго слагаемых соответственно третьего и четвертого сумматоров, выходы которых соединены с входом второго сомножителя второго умножителя и входом аргумента блока вычисления обратной величины
соответственно, выходы первого и третьего умножителей соединены с входами операндов соответственно четвертого и пятого квадраторов, выходы которых соединены с входами соответственно первого и второго
слагаемых пятого сумматора, выход которого соединен с входом вычитаемого первого вычитателя, выход которого соединен с входом блока вычисления обратной величины, выходы первого умножителя, третьего умножителя и блока вычисления квадратного корня соединены с груплой входов координат во взаимной системе входного коммутатора устройства.
-sr
i
I
l
OSi
&:
т
C;1
09:
L§ УЩЦЮ1 J J
ГУ , i / 4/1 :l Л 7 I Ц ±
9 /Г)Ф
.#:
п
У
ТП НИ Hil IIII
9 Фф 6
1n Тп1Г
-v
/J
9SW081
Фиё.9 /Д
1
I Et
х&
f
Фаз. ю
ъГ
у
dx
0- Я
2
У ; )
3W /
Ј2
К
t.
t
фиг -Л
| Устройство для преобразования координат | 1989 |
|
SU1681313A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
