Изобретение относится к электротехнике и может быть применено в системах регулирования скорости вращения электродвигателей постоянного тока.
Цель изобретения - расширение диапазона регулирования скорости вращения и улучшение динамических характеристик.
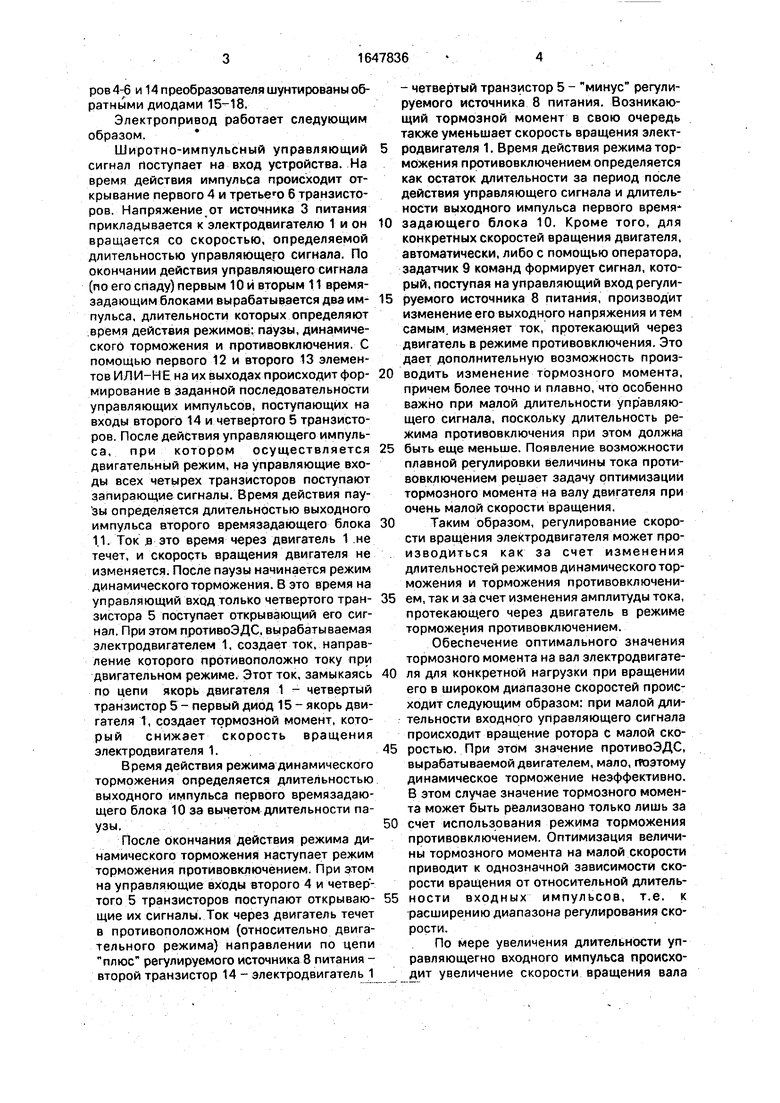
На чертеже представлена схема электропривода.
Электропривод содержит электродвигатель 1, подключенный к выходной диагонали мостового транзисторного преобразователя 2. Источник 3 питания первым выводом подключен к объединенным силовым электродам первого 4 и четвертого 5 транзистора преобразователя 2, Второй вывод источника 3 питания соединен с силовым электродом третьего транзистора 6 преобразователя 2, первый и третий управляющие входы которого объединены и подключены к выходу задающего устройства 7. Кроме того, электропривод содержит регулируемый источник 8 питания, задатчик 9 команд, два времязадающих блока 10 и 11 и два элемента ИЛИ-НЕ 12 и 13. Выходы элементов ИЛИ-НЕ 12 и 13 соединены соответственно с вторым и четвертым управляющими входами преобразователя 2. Одноименные первые выводы обоих источников 3 и 8 питания объединены. Второй вывод регулируемого источника 8 питания соединен с силовым электродом второго транзистора 14 преобразователя 2. Управляющий вход регулируемого источника 8 питания подключен к выходу задатчика команд 9. Входы времязадающих блоков 10 и 11 объединены и подключены к выходу задающего устройства 7 и вторым входам элементов ИЛИ-НЕ 12 и 13, первые выходы которых подключены к выходам соответствующих времязадающих блоков 10 и 11. .Эмиттерколлекторные переходы транзистоо
N Ч 00
ы еь
ров и 14 преобразователя шунтированы обратными диодами 15-18.
Электропривод работает следующим образом.
Широтно-импульсный управляющий сигнал поступает на вход устройства. На время действия импульса происходит открывание первого 4 и третьего 6 транзисторов. Напряжение от источника 3 питания прикладывается к электродвигателю 1 и он вращается со скоростью, определяемой длительностью управляющего сигнала. По окончании действия управляющего сигнала (по его спаду) первым 10 и вторым 11 время- задающим блоками вырабатывается два импульса, длительности которых определяют время действия режимов: паузы, динамического торможения и противовключения. С помощью первого 12 и второго 13 элементов ИЛ И-Н Е на их выходах происходит формирование в заданной последовательности управляющих импульсов, поступающих на входы второго 14 и четвертого 5 транзисторов. После действия управляющего импульса, при котором осуществляется двигательный режим, на управляющие входы всех четырех транзисторов поступают запирающие сигналы. Время действия паузы определяется длительностью выходного импульса второго времязадающего блока 1.1. Ток в это время через двигатель 1 не течет, и скорость вращения двигателя не изменяется. После паузы начинается режим динамического торможения. В это время на управляющий вход только четвертого транзистора 5 поступает открывающий его сигнал. При этом противоЭДС, вырабатываемая электродвигателем 1, создает ток, направление которого противоположно току при двигательном режиме. Этот ток, замыкаясь по цепи якорь двигателя 1 - четвертый транзистор 5 - первый диод 15 - якорь двигателя 1, создает тормозной момент, который снижает скорость вращения электродвигателя 1.
Время действия режима динамического торможения определяется длительностью выходного импульса первого времязадающего блока 10 за вычетом длительности паузы.
После окончания действия режима динамического торможения наступает режим торможения противовключением. При этом на управляющие входы второго 4 и четвертого 5 транзисторов поступают открывающие их сигналы. Ток через двигатель течет в противоположном (относительно двигательного режима) направлении по цепи плюс регулируемого источника 8 питания - второй транзистор 14 - электродвигатель 1
- четвертый транзистор 5 - минус регулируемого источника 8 питания. Возникающий тормозной момент в свою очередь также уменьшает скорость вращения электродвигателя 1, Время действия режима торможения противовключением определяется как остаток длительности за период после действия управляющего сигнала и длительности выходного импульса первого время
0 задающего блока 10. Кроме того, для конкретных скоростей вращения двигателя, автоматически, либо с помощью оператора, задатчик 9 команд формирует сигнал, который, поступая на управляющий вход регули5 руемого источника 8 питания, производит изменение его выходного напряжения и тем самым, изменяет ток, протекающий через двигатель в режиме противовключения. Это дает дополнительную возможность произ0 водить изменение тормозного момента, причем более точно и плавно, что особенно важно при малой длительности управляющего сигнала, поскольку длительность режима противовключения при этом должна
5 быть еще меньше. Появление возможности плавной регулировки величины тока противовключением решает задачу оптимизации тормозного момента на валу двигателя при очень малой скорости вращения.
0 Таким образом, регулирование скорости вращения электродвигателя может производиться как за счет изменения длительностей режимов динамического торможения и торможения противовключени5 ем, так и за счет изменения амплитуды тока, протекающего через двигатель в режиме торможения противовключением.
Обеспечение оптимального значения тормозного момента на вал электродвигате0 ля для конкретной нагрузки при вращении его в широком диапазоне скоростей происходит следующим образом: при малой длительности входного управляющего сигнала происходит вращение ротора с малой ско5 ростью. При этом значение противоЭДС, вырабатываемой двигателем, мало, поэтому динамическое торможение неэффективно. В этом случае значение тормозного момента может быть реализовано только лишь за
0 счет использования режима торможения противовключением. Оптимизация величины тормозного момента на малой скорости приводит к однозначной зависимости скорости вращения от относительной длитель5 ности входных импульсов, т.е. к расширению диапазона регулирования скорости.
По мере увеличения длительности уп- равляющегно входного импульса происходит увеличение скорости вращения вала
двигателя, что приводит и к увеличению противоЭДС. При этом эффективность динамического торможения возрастает, а необходимость в торможении противовклю- чением снижается. Поскольку начало режима противовключения и динамического торможения определяются окончанием (спадом) входного управляющего импульса, то задавая длительность выходных импульсов первого и второго времязадающих блоков, можно для конкретной нагрузки на вал двигателя оптимизировать время включения, длительность и величину обоих тормоз- ных режимов. Таким образом при проектировании схемы управления двигателем необходимо так подобрать значение тормозных моментов, чтобы во всем диапазоне скоростей вращения осуществлялась однозначная зависимость скорости вращения ротора от длительности импульсов.
Таким образом, применение предлагаемого электропривода в системах автоматического регулирования приводит, кроме того, и к значительному улучшению динамических свойств системы.
Формула изобретения Электропривод постоянного тока, содержащий электродвигатель, якорная обмотка которого подключена к выходной диагонали мостового транзисторного преобразователя, источник питания, первый вывод которого подключен к объединенным силовым электродам первого и четвертого
транзисторов мостового преобразователя, а второй вывод соединен с силовым электродом третьего транзистора мостового преобразователя, первый и третий управляющие входы которого объединены и
подключены к выходу задающего устройства, о т л и ч а ющийся тем, что, с целью расширения диапазона регулирования скорости вращения и улучшения динамических характеристик, в него введены регулируемый источник питания, задатчик команд, два времязадающих блока и два элемента ИЛИ-НЕ, выходы которых соединены соответственно с вторым и четвертым управляющими входами транзистороного
мостового преобразователя, одноименные первые выводы обоих источников питания объединены, второй вывод регулируемого источника питания соединен с силовым электродом второго транзистора мостового
преобразователя, управляющий вход регулируемого источника питания подключен к выходу задатчика команд, входы времязада- щих блоков объединены и подключены к выходу задающего устройства и вторым входам элементов ИЛИ-НЕ, первые выходы которых подключены к выходам соответствующих времязадающих блоков.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ торможения бесконтактного двухфазного вентильного электродвигателя | 1989 |
|
SU1721770A1 |
| Электропривод постоянного тока | 1980 |
|
SU928575A1 |
| Электропривод постоянного тока | 1985 |
|
SU1272452A1 |
| Устройство для регулирования вентильного электропривода | 1982 |
|
SU1048558A1 |
| МАЛОВЕНТИЛЬНЫЙ ЧЕТЫРЁХКВАДРАНТНЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА И СПОСОБ УПРАВЛЕНИЯ ИМ | 2017 |
|
RU2660187C1 |
| Устройство для управления электродвигателем постоянного тока | 1978 |
|
SU775850A1 |
| Устройство для управления вентильным электродвигателем | 1985 |
|
SU1302413A2 |
| Электропривод постоянного тока | 1988 |
|
SU1577047A1 |
| СПОСОБ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ | 1973 |
|
SU390648A1 |
| Электропривод постоянного тока | 1981 |
|
SU1015478A1 |
Изобретение относится к электротехнике и может быть применено в системах регулирований скорости вращения электродвигателей постоянного тока. Целью изобретения является расширение диапазона регулирования скорости вращения и, улучшения динамических характеристик.Расширение диапазона регулирования достигается путем ускорения неоднозначной зависимости между длительностью управляющего импульса и скоростью вращения ротора при малых значениях скорости вращения. Для обеспечения тормозного момента на малой скорости использовано торможение противовключе- нием, величина которого регулируется как по времени действия, так и по величине. С этой целью в электропривод введены два времязадающих блока, два элемента ИЛИ- НЕ и регулируемый источник питания. 1 ил.
| Реверсивный электропривод | 1983 |
|
SU1116514A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Коссов О.А | |||
| Усилители мощности на транзисторах в режиме переключений | |||
| - М.: Энергия, 1971, рис.134а | |||
