Изобретение относится « области автоматического управления электроприводами и может быть иопаль130:вано в системе автоматического управления электродвигателем постоянного тока.
Реверсивный тиристорный широтно-импульсный .преобразователь, «ак правило, применяется В системах автоматического управления при питанИИ двигателя постоянного тока от нерегулируемого ло напряжению источпика постоянного тока при токе нагрузки более 10а.
При пассивном нагрузочном моменте двигателя, регулируемого только по цепи якоря, рекуперация электромеханической энергии двигателя в источник в режиме торможения невозможна.
Известно использование в таких системах режима торможения противовключением, при котором регулируется относительная продолжительность согласного включения источника питания и э. д. с. двигателя.
Известный способ торможения - неэкономичен.
Недостаток применения этого способа в си.стемах с реверсивным широтно-импульсным преобраЗователем заключается в невозможности огран1гчивать тормозной ток на заданнОМ уровне, так как при переходе от импульса к паузе, как правИло, не происходит изменения
активного сопротивления цепн тока. Поэтому составляющая тормозного тока, онределяе.мая э.д.с. двигателя и параметрами цепи, не зависит от импульсного регулирования. Регулирование в этом режиме определяет Лишь долю энергии, потребляемой из источника и увеличивающей тормозной ток.
Недостаток торможения протнвовключением состоит в том, что для обеспечения безопасного перехода из режима торможения в двигательный режим необходимо отключать оба проводящих силовых тиристора одной диагонали моста. Для этого в схеме реверсивного широтно-импульсного преобразователя должно быть два устройства искусственной коммутации, что усложняет схему.
Известен та,кже способ управления реверсивным широтно-импульсным преобразователем в режиме динамического торможения, при KOToipoM регулируется относительная продолжительность включения Я1коря двигателя на активное сопротивление. Однако включение динамического сопротивления с целью ограничения тормозного тока .в таком режиме не яв.чяется необходи.мым и вызывает излищние потери в преобразователе.
С целью повышения к. п- д. упрощения преобразователя при управлении двигателем постоянного тока по предлагаемому способу в режиме динамического торможения регулируют относительную длительность включения толыко одного из двух тиристоров iipOTHiBonoло кных плеч моста.
Для повышения быстродействия по предлагаемому способу при управлении электродвигателем с малоинерционным якорем при переходе из двигательного режима з тормозной вентили обратного моста не включают.
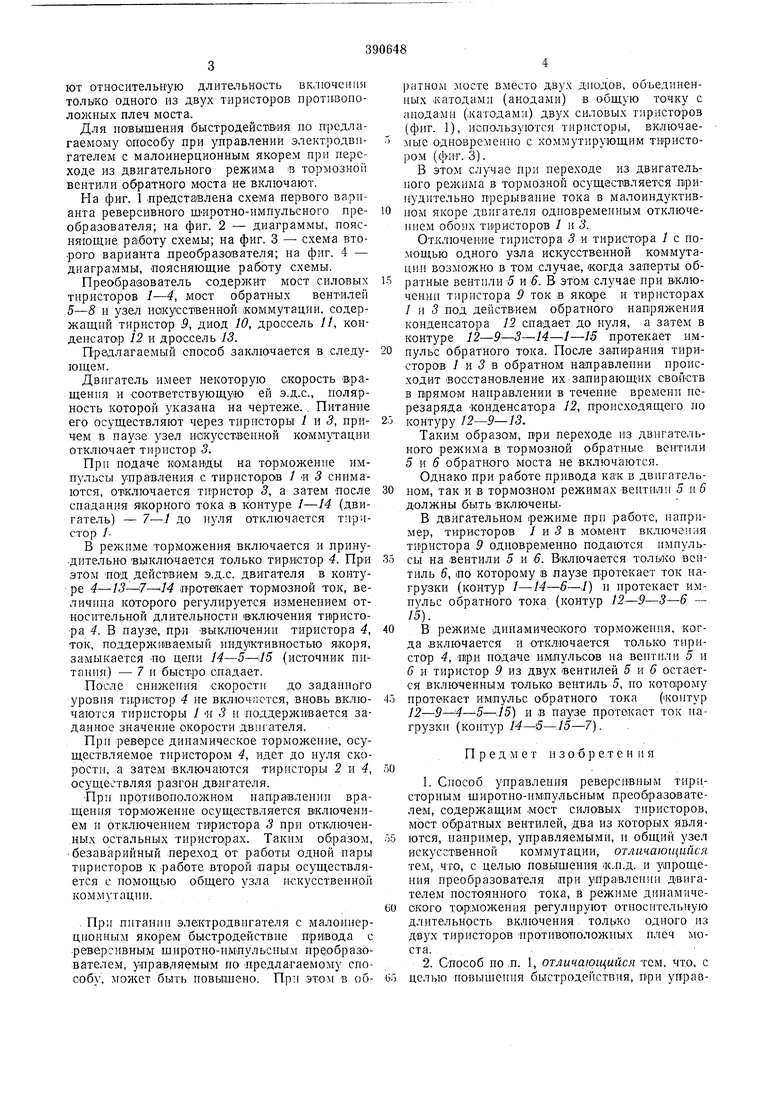
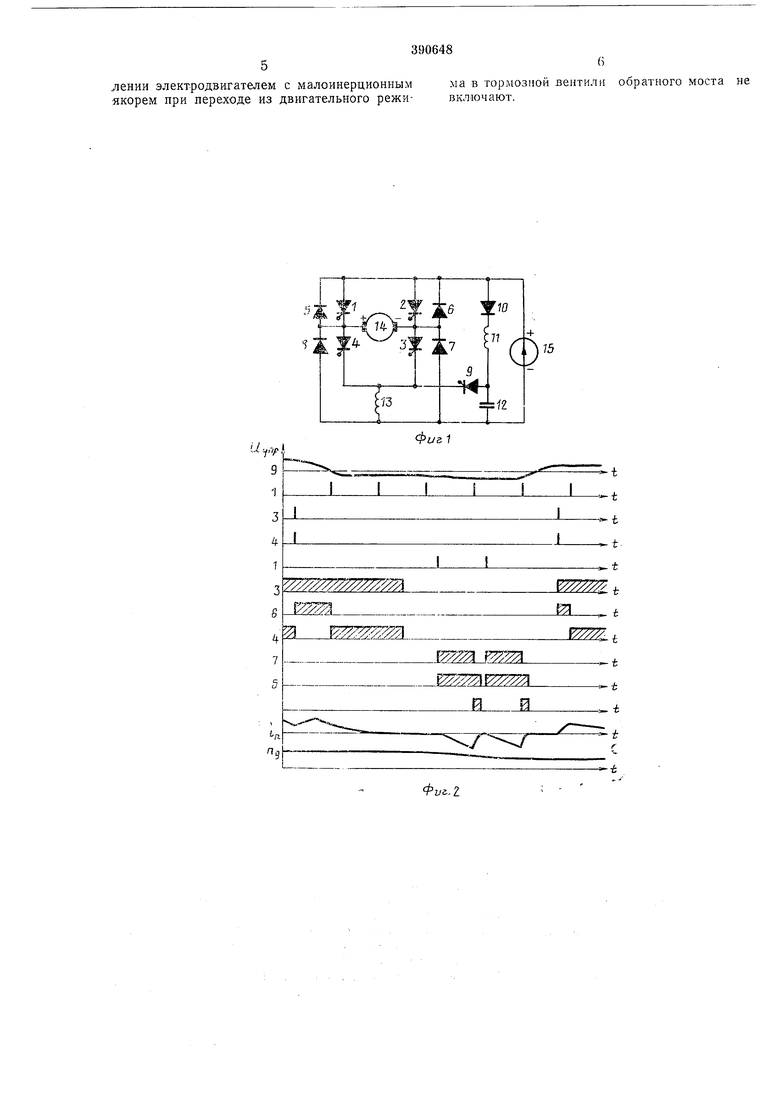
На фиг. 1 лредставлена схема первого варианта реверсивного Широтно-импульсного преобразователя; на фиг. 2 - диаграммы, поясняющие работу схемы; на фиг. 3 - схема второго варианта преобразователя; на фиг. 4 - диаграммы, поясняющие работу схемы.
Преобразователь содержит мост силовых тиристоров 1-4, мост обратных вентилей 5-8 и узел искусственной коммутации, содержащий тиристор 9, диод 10, дроссель //, кондепсатар 12 и дроссель 13.
Предлагаемый способ заключается в следующем.
Двигатель имеет некоторую скорость вращения и соответствующую ей э.д.с., полярность которой указана на чертеже. . Питание его осуществляют через тиристоры / и , причем в паузе узел искусстве и ной коммутации отключает тиристор 3.
При подаче команды на торможение импульсы управления с тиристоров 1 « 3 снимаются, отключается тиристор 3, а затем после спадания якорного тока s контуре /-14 (двигатель) - 7-7 до пуля отключается стор /.
В режиме торможения включается и принудительно выключается только тиристор 4. ПрИ этом ПОД действием э.д.с. двигателя в контуре 4-13-7- 14 протескает тор-мазной ток, величина которого регулируется изменением относительной длительности включения тиристора. В паузе, npa-i -выключении тиристора 4, ток, поддерживаемый индуктивностью якоря, замыкается По цепи 14-5-15 (источник питания) - 7 и быстро спадает.
После снижения скорости до заданного уровня тиристор 4 не включается, вновь включаются тиристоры 1 И 3 и поддерживается заданное значение скорости двигателя.
При реверсе динамическое торможение, осуществляемое тиристором 4, идет до нуля скорости, а затем включаются тиристоры 2 и 4, осуществляя разгон двигателя.
-При противоположном направлении вра-щения торможение осуществляется включением и отключением тиристора .9 при отключен.ных остальных тиристорах. Таким образом, безаварийный лереход от работы одной пары тиристоров к работе второй пары осуществляется с помощью общего узла искусственной коммутации.
. При питании электродвигателя с малоинерционным якорем быстродействие привода с реверсивным шнротно-импульсным преобразователем, управляемым по предлагаемому способу, может быть повышено. При этом в обратном .мосте вместо двух диодов, ооъединенных а атодами (анодами) в общую точку с анодами (катодами) двух силовых тиристоров (фиг. 1), используются тиристоры, включаемыо. одновремеино с коммутирующим тиристо Ю.м (фиг. 3).
В этом случае при переходе из двигатель1ЮГО режима в тормозной осуществляется принудительно прерывание тока в малоиндуктив1ЮМ якоре двигателя одновременным отключением обоих тиристоров 1 и 3.
Отключение тиристора 3 и тиристора 1 с номощью одного узла искусственной коммутации возможно в том случае, когда заперты обратные вентили -5 и 6. В этом случае при включении тиристора 9 ток в якаре и тиристорах / и 3 под дейстВИем обратного напряжения конденсатора 12 спадает до нуля, а затем в контуре 12-9-3-14-1-15 протекает импульс обратного тока. После запирания тиристоров 7 и 5 в обратном направлении происходит восстановление их запирающих свойств в прямом нанравлении в течение времени перезаряда конденсатора 12, происходящего по контуру 12-9-13.
Таким образом, при переходе из двигательного режима в тормозной обратные вентили
5н 6 обратного моста не включаются. Однако при работе привода как в двигательном, так и в тормозном режимах вентили 5 и 6 должны быть включеныВ двигательном режиме при работе, например, тиристоров / и 5 в мамбнт включения тиристора 9 одновременно подаются импульсы на вентили 5 и 6. Включается только вентиль 6, 1ПО которому в паузе протекает ток нагрузки (контур /--14-6-J) п протекает импульс обратного тока (контур 13-9-3-6 -15).
В режиме динамичеокого торможения, когда включается и отключается только тиристо-р 4, при подаче импульсов на вентили 5 и
6и тиристор 9 из двух вентилей 5 и ( остается включенным только вентиль 5, по которому протекает им-пульс обратного тока (контур 12-9-4-5-15) и Б паузе протекает ток иагрузки (контур 14-6-15-7).
Предмет изобретения
1.Способ управления реверсивным тиристорным широтно-иМПульсньш преобразователем, содержащим мост силовых тиристоров, мост обратных вентилей, два из которых являются, например, управляемыми, и общи11 узел искусственной коммутации, отличающийся тем, .что, с целью повыщения к.п.д. и упрощения преобразователя при у Правле1 ии двигателем постоянного тока, в режиме динамичеокого Т01р:можения регулируют относител1 иую длительность включения только одного из двух тиристоров противоположных плеч моста..2.Способ по .п. 1, отличающийся тем, что, с целью повышения быстродействия, при управлении электродвигателем с малоинерционным якорем при переходе из двигательного режима в тормозной вентили обратного моста не включают.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1985 |
|
SU1288878A1 |
| Реверсивный электропривод постоянного тока | 1975 |
|
SU752714A1 |
| Способ управления тиристорами широтно-импульсного преобразователя и устройство для его осуществления | 1979 |
|
SU855928A1 |
| УСТРОЙСТВО ДЛЯ ИМПУЛЬСНОГО РЕГУЛИРОВАНИЯ ТЯГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1973 |
|
SU434037A1 |
| Устройство для управления электроприводом с тиристорным широтноимпульсным преобразователем | 1972 |
|
SU603078A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ШИРОТНЬ- ИМПУЛЬСНЫМ УПРАВЛЕНИЕМ | 1970 |
|
SU421096A1 |
| Вентильный двигатель | 1983 |
|
SU1130970A1 |
| Реверсивный электропривод постоянного тока с широтно-импульсным управлением | 1974 |
|
SU498702A1 |
| Реверсивный вентильный электропривод | 1988 |
|
SU1598097A1 |
| УСТРОЙСТВО для РЕКУПЕРАТИВНОГО ТОРМОЖЕНИЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1973 |
|
SU399408A1 |
11 f
9h
Фиг.1
i
f
-i
Фиг 3
U (j,.
