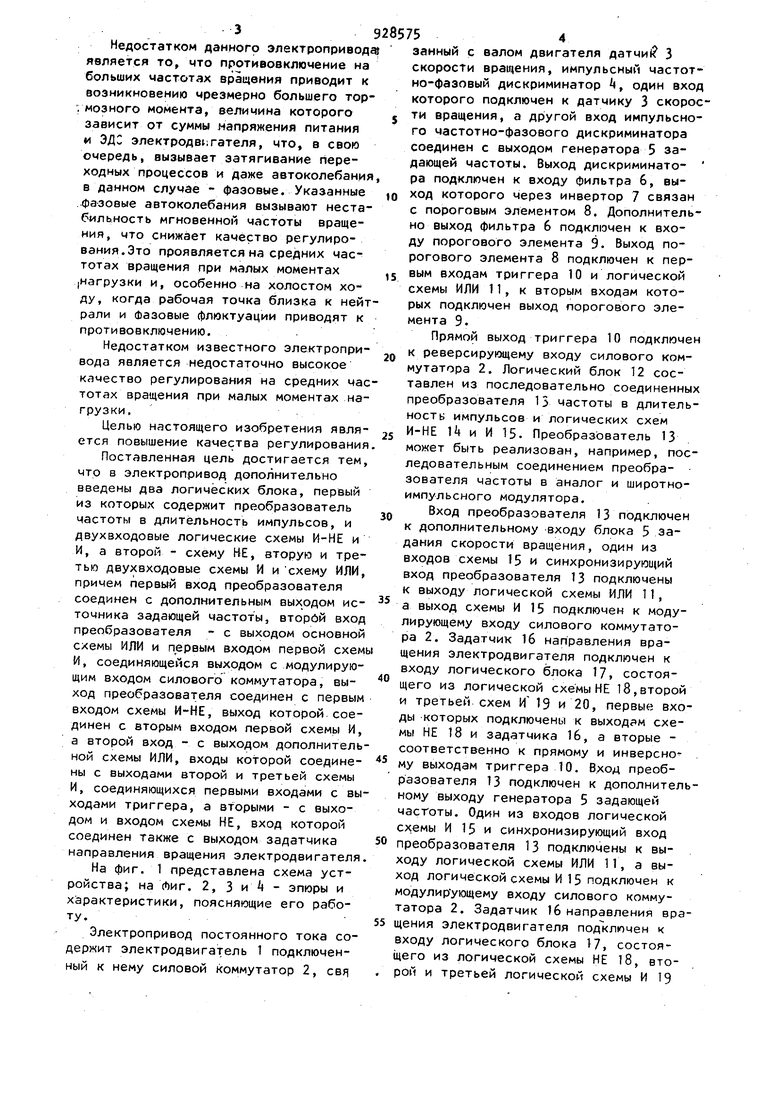
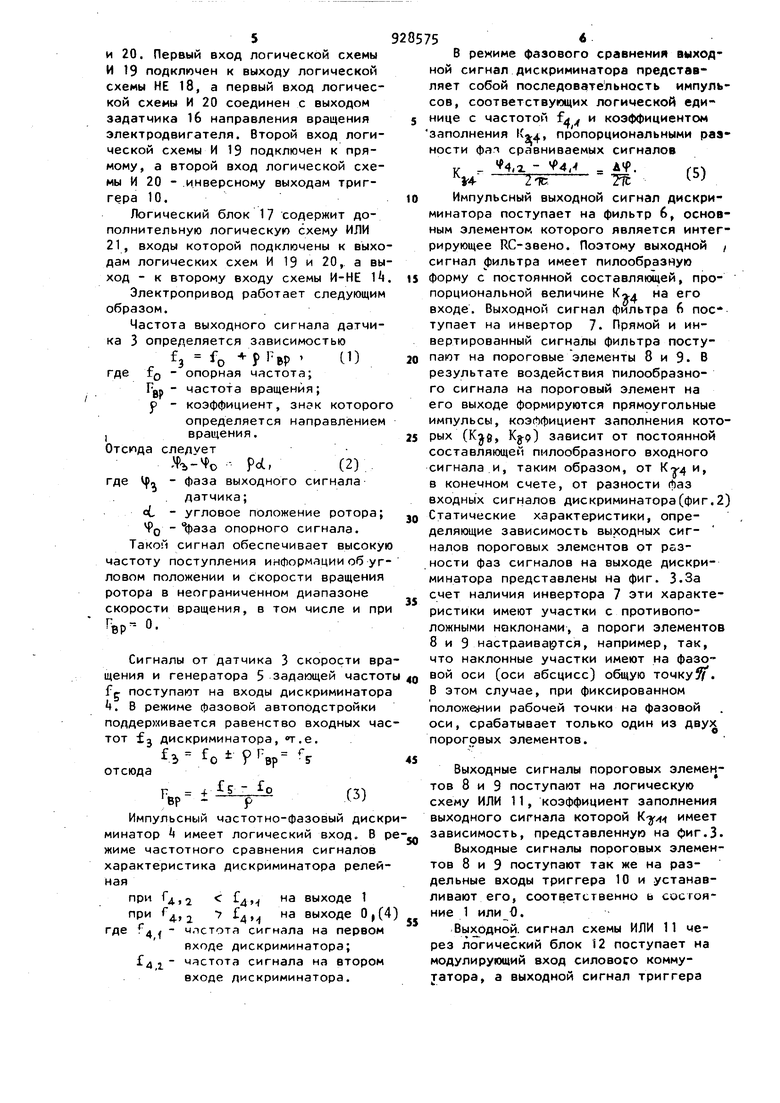
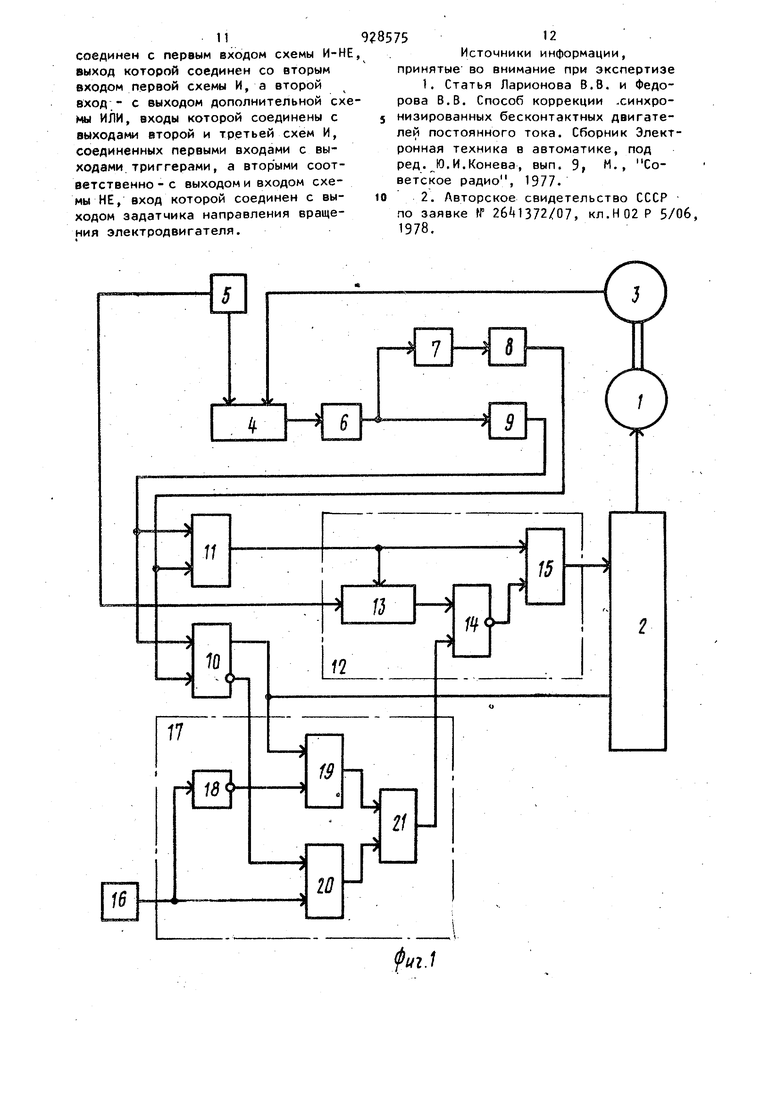
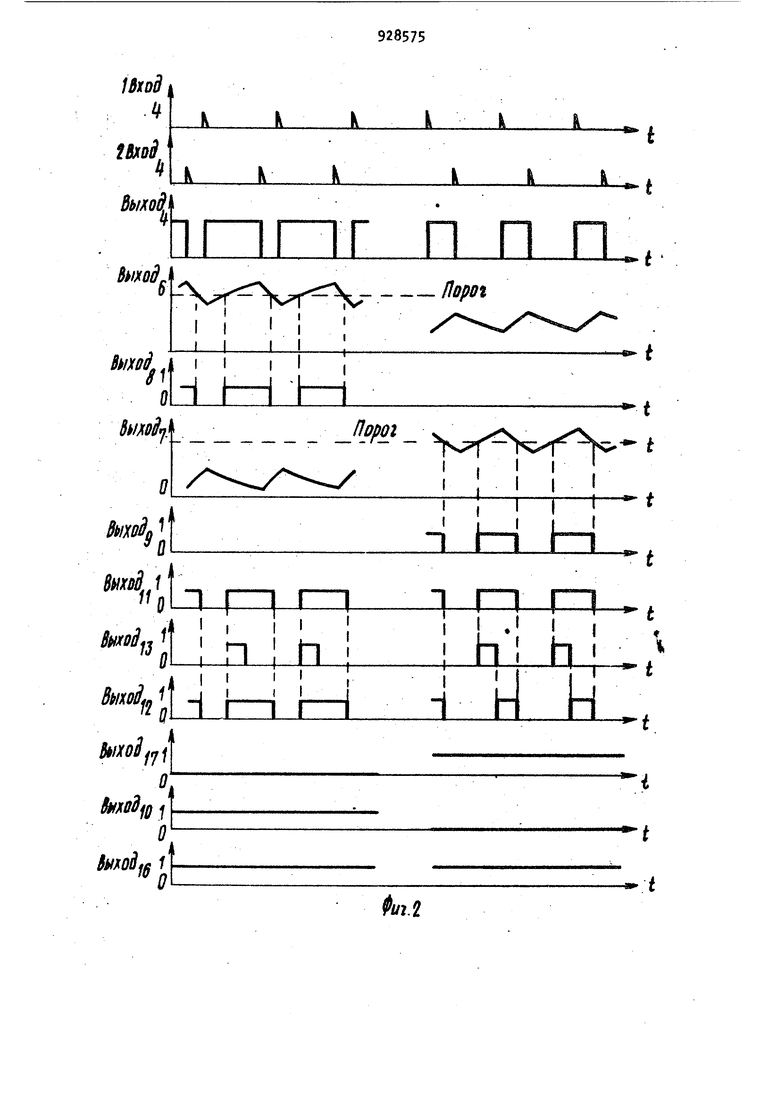
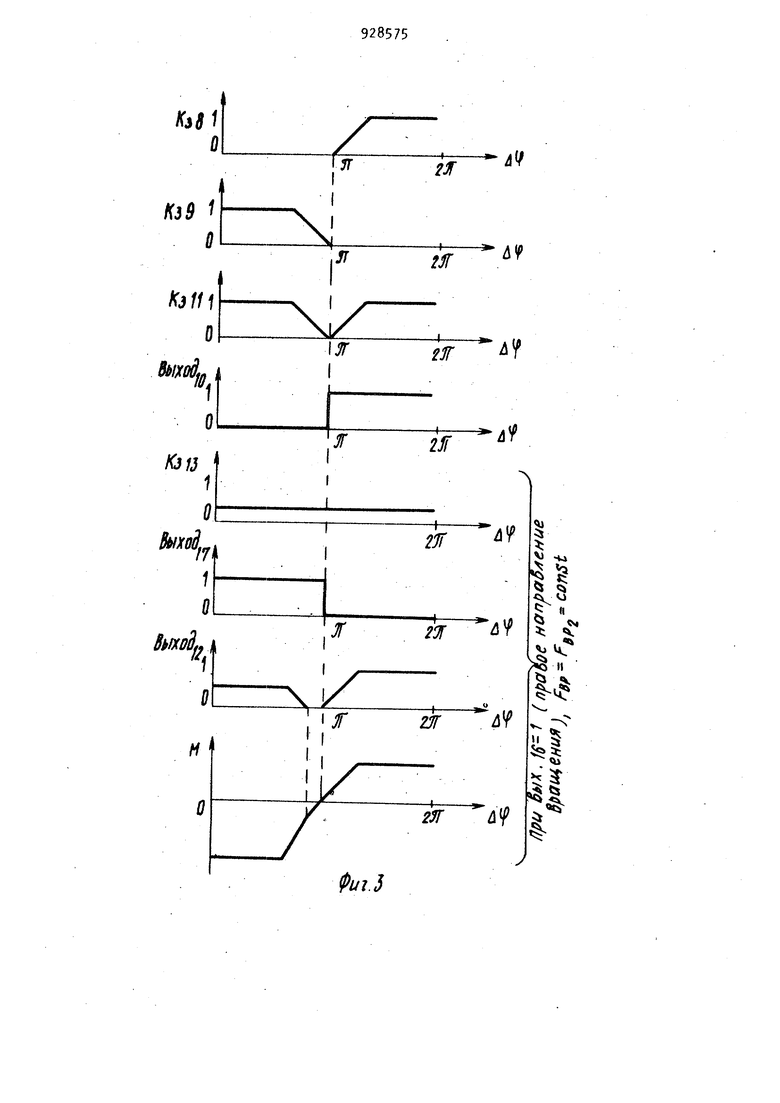
Изобретение относится к электро- технике, в частности к системам синхронизации скорости электродвигателей постоянного тока. Известен электропривод постоянного тока, содержащий электродвигатель, подключенный к силовому коммутатору с модулирующим и реверсирующим входами, датчик скорости электродвигателя, подключенный к входу частотно фазового дискриминатора, второй вход которого соединен с источником задающей частоты, а выход - через фильтр с входом порогового устройства. Недостатком электропривода является ограниченный диапазон синхронизации особенно в области низких скоростей электродвигателя. Наиболее близким к изобретению по технической сущности является электро привод постоянного тока, содержащий электродвигатель, подключенный к выходу силового коммутатора, датчик скорости электродвигателя, подклоченный н вход частотно фазового дискриминатора, второй вход которого, соединен с выхо ом генератора задающей частоты, а выход через Аильтр с входом инвертора, два пороговых устройства, выходы которых соединены со 5тветственно с входом и выходоминвертора, а выходы - с входами схев му ИЛИ и триггера, соединенного прямым вь4ходом с реверсирующим входом силового коммутатора, и задатмик направления вращения электродвигателя. Возможность изменения в этом электроприводе не только величины, но и знака электромагнитного момента обеспечивает устойчивость регулирования,на всех частотах вращения, включая низкие, вплоть до нуля, что обесп чивавает широкий диапазон частотного регулирования. Кроме того, обеспечивается возможность регулирования при знакопеременном активном моменте на грузки во всем диапазоне частот вращения 2. Недостатком данного электропривода является то, что противовключение на больших частотах вращения приводит к возникновению чрезмерно большего тор, мозного момента, величина которого зависит от суммы иапряжения питания и ЭДС электродвигателя, что, в свою очередь, вызывает затягивание переходных процессов и даже автоколебания в данном случае - фазовые. Указанные фазовые автоколебания вызывают нестабильность мгновенной частоты вращения, что снижает качество регулирования. Это проявляется на средних частотах вращения при малых моментах |Нагрузки и, особенно на холостом ходу, когда рабочая точка близка к нейт рали и Фазовые флюктуации приводят к противовключению. Недостатком известного электропривода является недостаточно высокое качество регулирования на средних час тотах вращения при малых моментах нагрузки. Целью настоящего изобретения является повышение качества регулирования Поставленная цель достигается тем, что в электропривод дополнительно введены два логических блока, первый из которых содержит преобразователь частоты в длительность импульсов, и двухвходовые логические схемы И-НЕ и И, а второй - схему НЕ, вторую и третью двухвходовые схемы И и схему ИЛИ, причем первый вход преобразователя соединен с дополнительным выходом источника задающей частоты, вторбй вход преобразователя - с выходом основной схемы ИЛИ и первым входом первой схем И, соединяющейся выходом с модулирующим входом силового коммутатора, выход преобразователя соединен с первым входом схемы И-НЕ, выход которой соединен с вторым входом первой схемы И, а второй вход - с выходом дополнитель ной схемы ИЛИ, входы которой соединены с выходами второй и третьей схемы И, соединяющихся первыми входами с вы ходами триггера, а вторыми - с выходом и входом схемы НЕ, вход которой соединен также с выходом задатмика направления вращения электродвигателя На фиг. 1 представлена схема устройства; на Лиг. 2, 3 и 4 - эпюры и характеристики, поясняющие его работу. Электропривод постоянного тока содержит электродвигатель 1 подключенный к нему силовой коммутатор 2, свя| 9 5 занный с валом двигателя датчи 3 скорости вращения, импульсный частотно-фазовый дискриминатор Ц один вход которого подключен к датчику 3 скорости вращения, а другой вход импульсного частотно-фазового дискриминатора соединен с выходом генератора 5 задающей частоты. Выход дискриминатора подключен к входу фильтра 6, выход которого через инвертор 7 связан с пороговым элементом 8. Дополнительно выход фильтра 6 подключен к входу порогового элемента 9. Выход порогового элемента 8 подключен к первым входам триггера 10 и логической схемы ИЛИ 11, к вторым входам которых подключен выход порогового элемента 9. Прямой выход триггера 10 подключен к реверсирующему входу силового коммутатора 2. Логический блок 12 составлен из последовательно соединенных преобразователя 15 частоты в длительность импульсов и логических схем И-НЕ 14 и И 15. Преобразователь 13 может быть реализован, например, последовательным соединением преобразователя частоты в аналог и широтноимпульсного модулятора. Вход преобразователя 13 подключен к дополнительному входу блока 5 задания скорости вращения, один из входов схемы 15 и синхронизирующий вход преобразователя 13 подключены к выходу логической схемы ИЛИ 11, а выход схемы И 15 подключен к модулирующему входу силового коммутатора 2. Задатчик 16 направления вращения электродвигателя подключен к входу логического блока 17, состоящего из логической схемы НЕ 18,второй и третьей схем И 19 и 20, первые входы которых подключены к выходам схемы НЕ 18 и задатчика 16, а вторые соответственно к прямому и инверсно . му выходам триггера 10. Вход преобразователя 13 подключен к дополнительному выходу генератора 5 задающей частоты. Один из входов логической схемы И 15 и синхронизирующий вход преобразователя 13 подключены к выходу логической схемы ИЛИ 11, а выход логической схемы И 15 подключен к модулирущему входу силового коммутатора 2. Задатчик 16 направления вращения электродвигателя под ключен ч входу логического блока 17, состоящего из логической схемы НЕ 18, второй и третьей логической схемы И 19 и 20. Первый вход логической схемы И 19 подключен к выходу логической схеиы НЕ 18, а первый вход логической схемы И 20 соединен с выходом задатчика 16 направления вращения электродвигателя. Второй вход логической схемы И 19 подключен к прямому, а второй вход логической схемы И 20 - инверсному выходам триггера 10. Логический блок 17 содержит дополнительную логическую схему ИЛИ 21, входы которой подключены к выхо дам логических схем И 19 и 20, а вы ход - к второму входу схемы И-НЕ 1 Электропривод работает следующим образом. Частота выходного сигнала датчика 3 определяется зависимостью f3 О ( где ff) - опорная частота; Fgp - частота вращения; j - коэффициент, знак которог определяется направлением , вращения. Отсюда следует Рг-% - pot, (2) где - фаза выходного сигнала датчика; (, - угловое положение ротора; - %аза опорного сигнала. Такой сигнал обеспечивает высоку частоту поступления информации об yi- ловом положении и скорости вращения ротора в неограниченном диапазоне скорости вращения, в том числе и пр ГВР- 0. Сигналы от датчика 3 скорости вр щения и генератора 5 задающей часто fr поступают на входы дискриминатор . В режиме фазовой автоподстройки поддер ; ивается равенство входных ча тот J дискриминатора, «т.е. Ъ fo вр отсюда F - -(- вр - f Импульсный частотно-фазовый диск минатор Ц имеет логический вход. В жиме частотного сравнения сигналов характеристика дискриминатора релей ная при f. 4н выходе 1 при Гд, . -7 , на выходе О,( где 4 f чстота сигнала на первом входе дискриминатора; f д - частота сигнала на втором входе дискриминатора. в режиме фазового сравнения выходной сигнал дискриминатора представляет собой последовательность импульсов, соответствующих логической единице с частотой f4 и коэффициентом заполнения Kj,, пропорциональными разности фат сравниваемых сигналов - ,х - 4,- АФ. 4. 21Е ТгЬ Импульсный выходной сигнал дискриминатора поступает на фильтр 6, основным элементом которого является интегрирующее RC-звено. Поэтому выходной / сигнал фильтра имеет пилообразную форму с постоянной составляющей, пропорциональной величине К на его входе. Выходной сигнал фильтра 6 пос тупает на инвертор 7. Прямой и инвертированный сигналы фильтра поступают на пороговые элементы 8 и 9. В результате воздействия пилообразного сигнала на пороговый элемент на его выходе формируются прямоугольные импульсы, коэффициент заполнения которых ( J) зависит от постоянной составляющей пилообразного входного сигнала и, таким образом, от Ку4 и, в конечном счете, от разности фаз входных сигналов дискриминатора(фиг.2) Статические характеристики, определяющие зависимость выходных си1- налов пороговых элементов от разности фаз сигналов на выходе дискриминатора представлены на фиг. З.За счет наличия инвертора 7 эти характеристики имеют участки с противоположными наклонами, а пороги элементов 8 и 9 настраива)тся, например, так, что наклонные участки имеют на фазовой оси (оси абсцисс) общую точку57. В этом случае, при фиксированном положении рабочей точки на фазовой оси, срабатывает только один из двух пороговых элементов. Выходные сигналы пороговых элементов 8 и 9 поступают на логическую схему ИЛИ 11, коэффициент заполнения выходного сигнала которой K-y/j имеет зависимость, представленную на фиг.З. Выходные сигналы пороговых элементов 8 и 9 поступают так же на раздельные входы триггера 10 и устанавливают его, соответственно ь состояние 1 . Выходной, сигнал схемы ИЛИ 11 через логический блок 12 поступает на модулирующий вход силового коммутатора, а выходной сигнал триггера 10 поступает на реверсиру силового коммутатора 2. Воздействие на электро налов модулирующего и рев го входов силового коммут ределяется таблицей. Таб
При увеличивающейся нагрузке электродвигателя () создается момент в направлении вращения,,а при уменьшающейся (М 0)создается тормозящий момент.
Регулирование момента осуществляется изменением коэффициента заполнения импульсов логической 1, следующих с частотой и 1. Положительный момент cojiflaejcfl при чередовании прямого включения и выключения, а отрицательный момент - при чередовании противовклюмения и динамического торможения .
Рассмотрим далее работу электропривода, например, при заданном правом направлении вращения, В этом случае, рабочая точка находится справа от нейтральной точки /С (фиг. 3).
При малом моменте нагрузки рабочая точка близка к /К и фазовые флюктуаНИ Я F,
ВР
,0, (Рвр) (6)
К, Импульсы с выхода преобразователя поступают на вход схемы И-НЕ 14 в дальнейшее их прохождение зависит от выходного сигнала логического блока 17, работа которого определяется таблицей.
Таблица 2
Правое
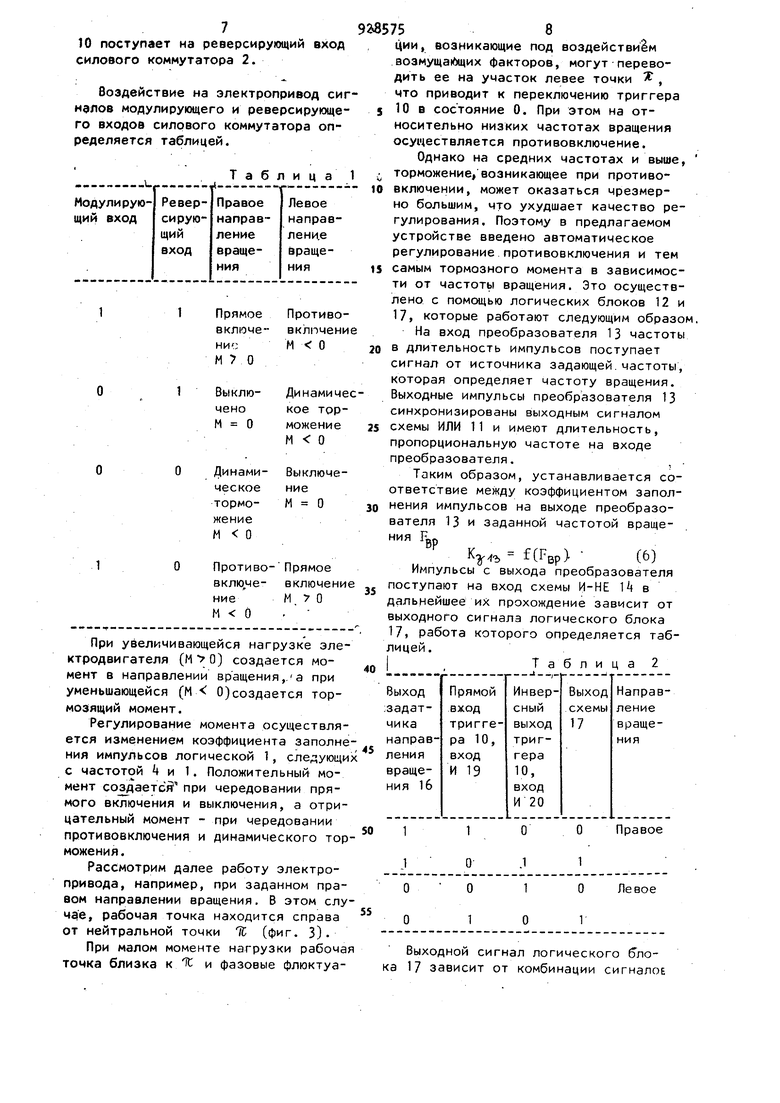
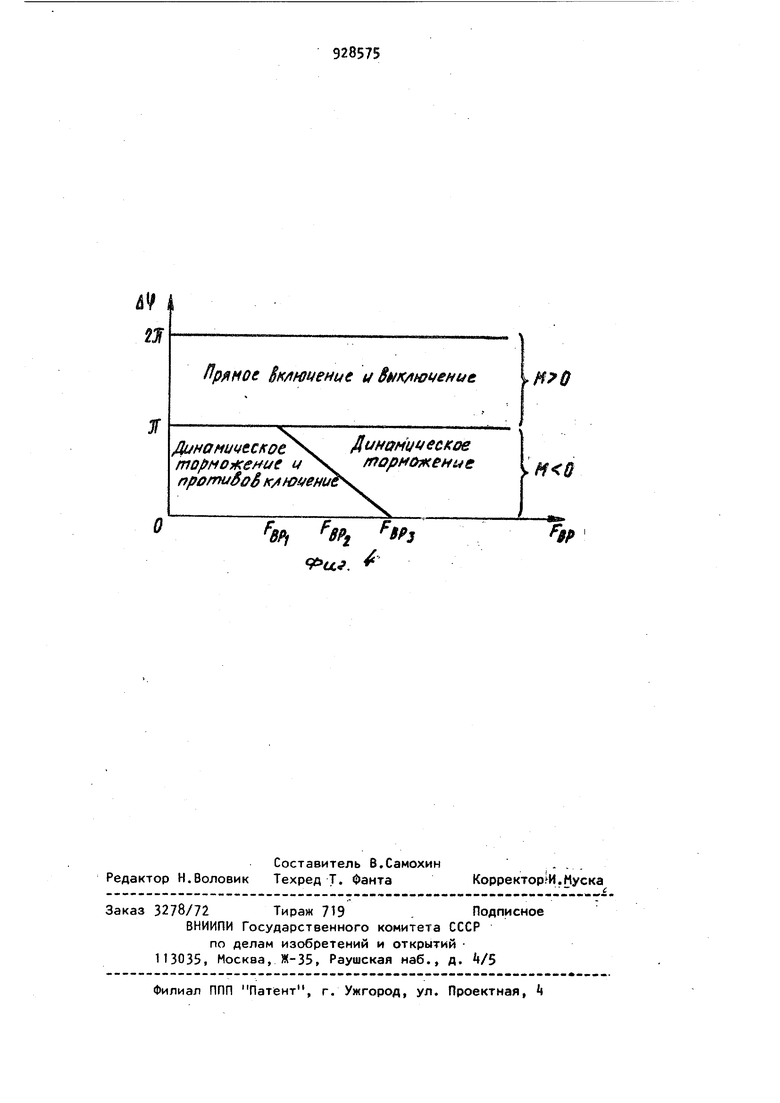
Выходной сигнал логического б лока 17 зависит от комбинации СИГИЗЛОЕ 58 ции, возникающие под воздействием возмуща1)щих факторов, могут переводить ее на участок левее точки , что приводит к переключению триггера 10 в состояние 0. При этом на относительно низких частотах вращения осу1чествляется противовключение. Однако на средних частотах и выше, торможение, возникающее при противовключении, может оказаться чрезмерно большим, что ухудшает качество регулирования. Поэтому в предлагаемом устройстве введено автоматическое регулирование противовключения и тем самым тормозного момента в зависимости от частоты вращения. Это осуществлено с помощью логических блоков 12 и 17, которые работают следующим образом. На вход преобразователя 13 частоты в длительность импульсов поступает сигнал от источника задающей.частоты, которая определяет частоту вращения. Выходные импульсы преобразователя 13 синхронизированы выходным сигналом схемы ИЛИ 11 и имеют длительность, пропорциональную частоте на входе преобразователя., . Таким образом, устанавливается соответствие между коэффициентом заполнения импульсов на выходе преобразователя 13 и заданной частотой вращеу . 9 задатчика 16 направления вращения и триггера 10, т.е. от режима работы электропривода. При помощи включения, т.е. когда, электропривод создает положительный для заданного направления вращенця момент, на выходе блока 17 сигнал О, а после переключения триггера 10 для отрицательного, т.е. тормозного момента, на выходе блока 17 сигнал 1. При сигнале О на выходе блока 17 логический блок 12 пропускает ,без изменения импульсы схемы ИЛИ 11 на модулирующий вход силового коммутатора. Таким образом, в режиме прямого включения блок 12. роли не играет. При сигнале 1 на выходе логического блока 17 открывается прохождение импульсов через схему И-НЕ 1, на которой они интегрируются. Инвертированные импульсы поступают на Схе му И 15 и закрывают ее для прохождения выходных импульсов схемы ИЛИ 11 (фиг. 2). Таким образом, сигнал на выходе логического блока 12 определяется следующим образом при К, К,К5, К.- гя о () де коэффициенты заполнения выходны сигналов схемы ИЛИ 11, преобразователя 1 3 и логического блока 12; определяется зависимостью (6). Как видно из (6) и (7) в режиме создания тормозного,, т.е. отрицатель ного момента, противовключение может производиться или не производиться, зависимости от частоты вращения. При отсутствии противовключения отрицательный момент создается динамически торможением, при этом абсолютная вел чина момента значительно меньше чем при противовключении. Как видно из фиг. 4, при Igp F отрицательный, т.е. тормозной момент создается чередующимися с частотой м дуляции режимами динамического тормо жения и противовключения, при g,p FO доля противовключения уменьшается, а при Inp i--p противовключение полность прекращается и тормозной момент созд ется только динамическим торможением 5 Для неко14лйого фиксированного чения Iepi зависимость M(AV) представлена на фиг. . Соответствующей реализацией зависимости (6) осуществляется необходимая зависимость противовключения и динамич.еского торможения от частоты вращения (фиг. 4). Характеристики.(фиг. 3) относятся к случаю правого направления вращения-. При левом направлении вращения характеристики Вых.7 Kf будут симметричны характеристикам правого вращения с вертикальной осью симметрии,проходящей через точку 1t. Предлагаемое устройство позволяет ввести автоматическое регулирование тормозного момента в зависимости от частоты вращения, что позволяет повысить качество регулирования при малых моментах нагрузки и расширить функциональные возможности электропривода. Формула изобретения Электропривод постоянного тока, содержащий электродвигатель, подключенный к выходу силового коммутатора, датчик скорости вращения электродвигателя, подключенный на один вход частотнофазового дискриминатора,второй вход которого соединен с выходом генератора задающей частоты, а выход через фильтр - с входом инвертора, два пороговых элемента, выходы которых соединены соответственно с входом и выходом инвертора, а выходы - . со входами схемы ИЛИ и триггера, соединенного прямым входом с реверсирующим входом силового коммутатора, и задатчик направления вращения электродвигателя, отличающий-, с я тем, что, с целью повышения качества регулирования, в электропривод дополнительно введены два логических блока, первый из которых содержит преобразователь частоты в длительность импульсов и двухвходовые схемы И-НЕ и И, а второй схему НЕ, вторую и третью двухвходовые схемы И и схему ИЛИ, причем первый вход преобразователя соединен с дополнительным выходом генератора задающей частоты, второй вход преобразователя - с выходом основной схемы ИЛИ и первым входом первой схемы И, соединенной выходом с модулирующим входом силового коммутатора, выход преобразователя
11
соединен с первым входом схемы И-НЕ выход которой соединен со вторым входом первой схемы И, а второй вход - с выходом дополнительной схе мы ИЛИ, входы которой соединены с выходами второй и третьей схем И, соединенных первыми входами с выходами триггерами, а вторыми соответственно - с выходом и входом схемы НЕ, вход которой соединен с выходом эадатчика направления вращения электродвигателя.
857512
. Источники информации,
принятые во внимание при экспертизе К Статья Ларионова В.В. и Федорова В.В. Способ коррекции хинхро5 низированных бесконтактных двигателей постоянного тока. Сборник Электронная техника в автоматике, под ред.Ю.И.Конева, вып. 9, М., Советское радио, 1977. 10 2. Авторское свидетельство СССР по заявке N° 26 1372/07, кл.Н02Р 5/Об, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1978 |
|
SU771834A1 |
| Электропривод постоянного тока | 1981 |
|
SU995247A1 |
| Электропривод постоянного тока | 1985 |
|
SU1272452A1 |
| Позиционный электропривод | 1984 |
|
SU1270859A1 |
| Электропривод постоянного тока | 1987 |
|
SU1411910A1 |
| Устройство для управления частотой вращения ротора асинхронного электродвигателя | 1984 |
|
SU1277343A1 |
| Электропривод постоянного тока | 1991 |
|
SU1786630A1 |
| Электропривод | 1988 |
|
SU1564707A1 |
| Электропривод | 1987 |
|
SU1434532A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2310971C1 |
иг.1
,-I 1-1
SffJlB fg
M i
1 П m . t
111«
I I I
i
i
фиг 5
Пряное t4 8ик/1Н}чений
3f
uuHOMUiftCKoe MtJHOMQf ecKoe ч ториож ние npomu oS tf/iH: ifeHUt
Bf SPf ВРз .
B
