Изобретение относится к машиностроению и может быть использовано в гидрав- лических тормозах при испытаниях двигателей и элементов трансмиссии машин.
Целью изобретения является расширение функциональных возможностей тормоза путем обеспечения возможности реверса валов испытываемых элементов трансмиссии и повышение надежности путем повышения стабильности теплового режима работы и обеспечения пространственной жесткости лопаток тормоза.
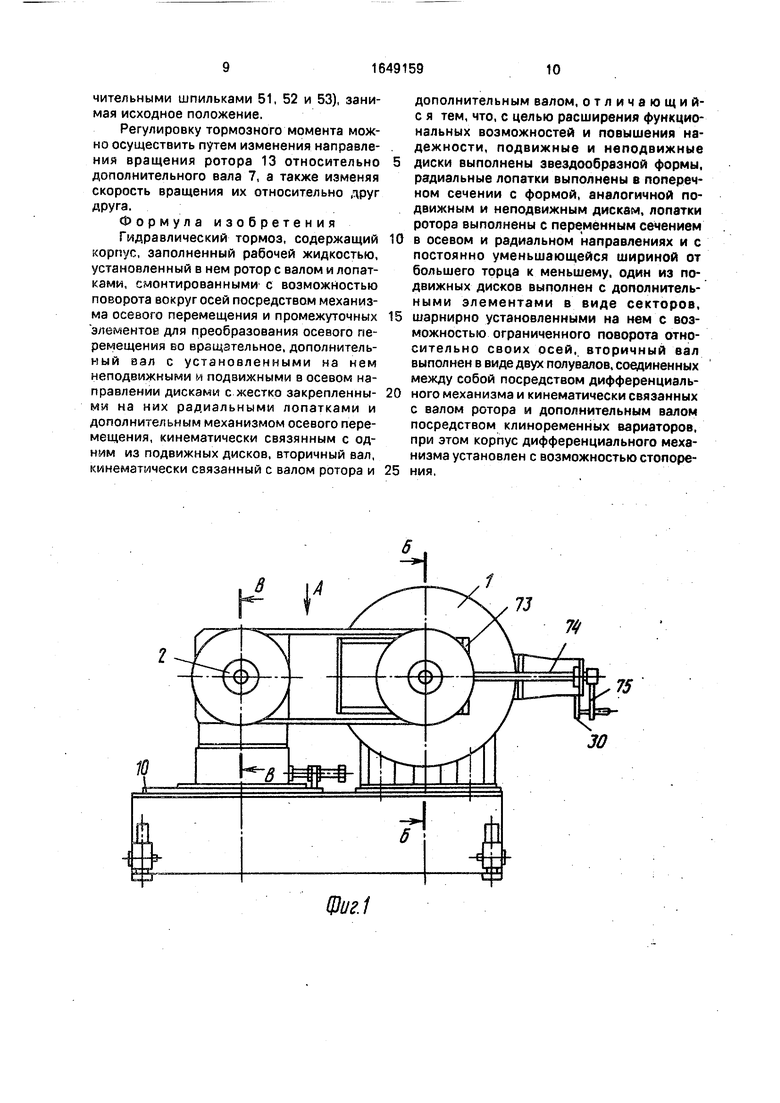
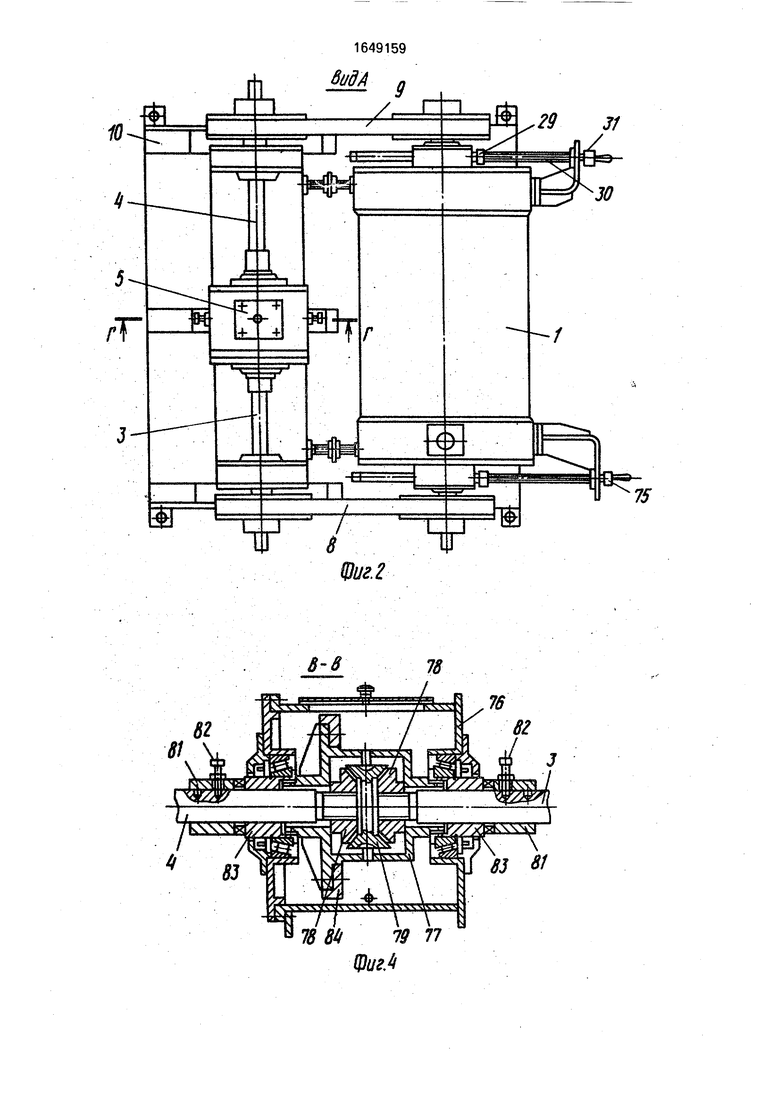
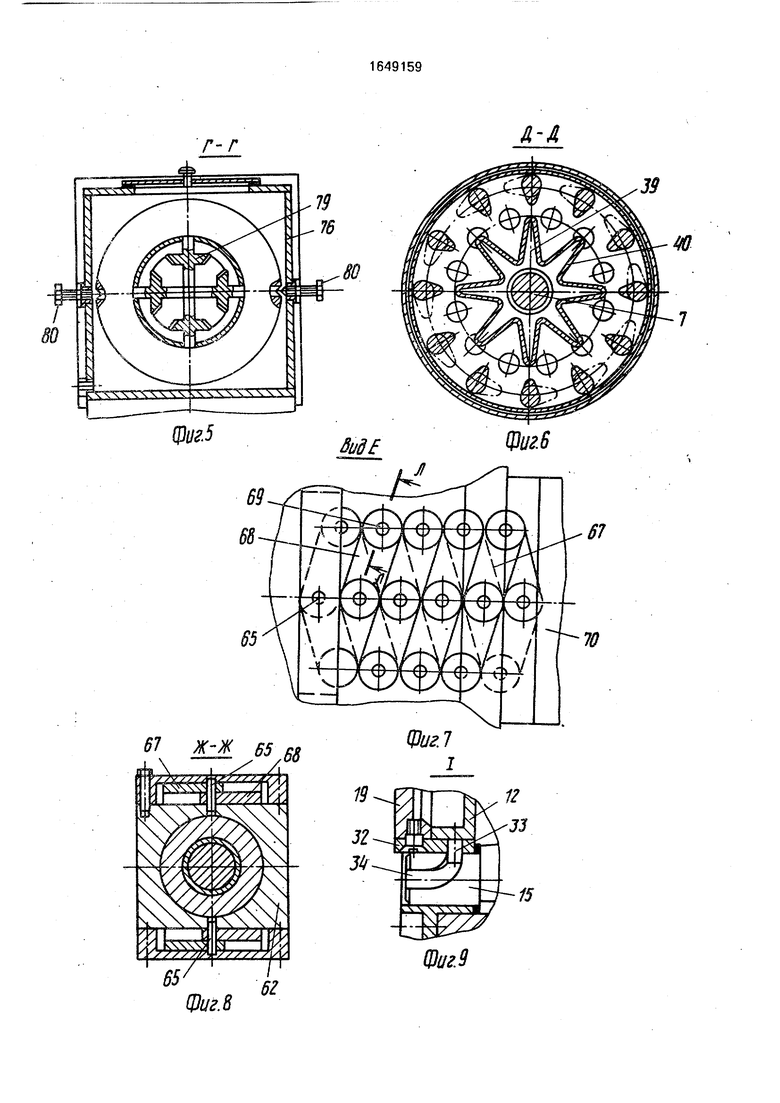
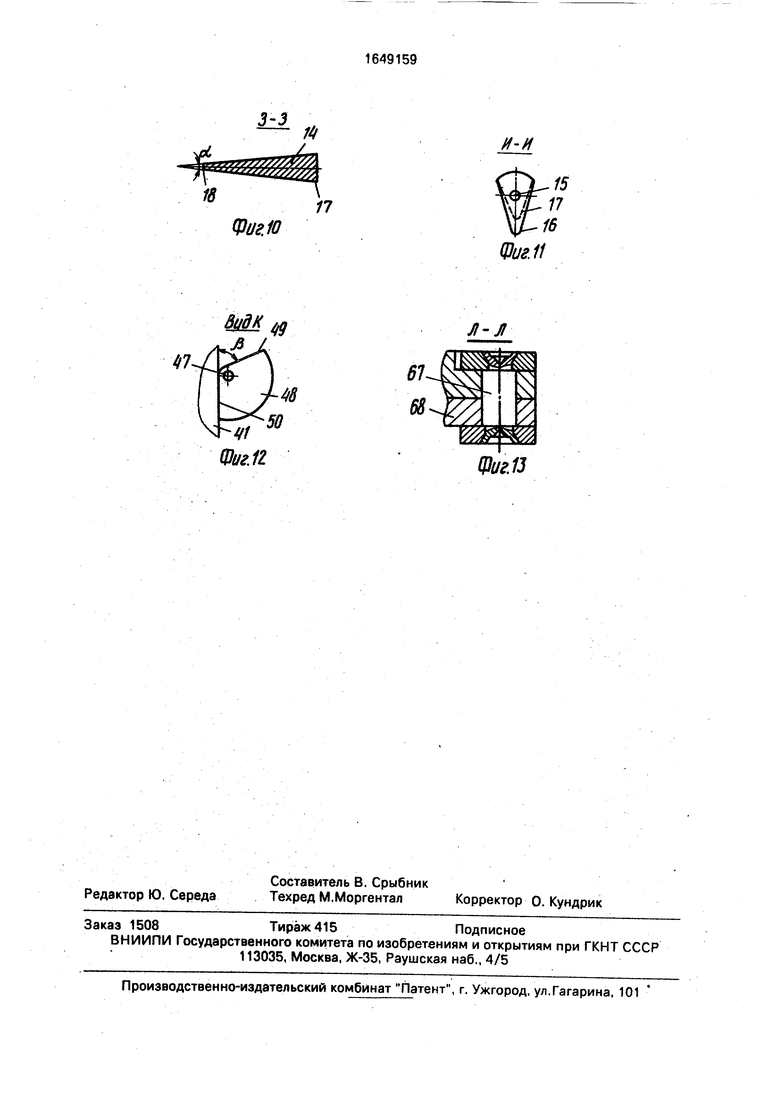
На фиг. 1 схематично показан предлагаемый гидравлический тормоз; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1; на фиг, 5 - разрез Г-Г на фиг. 2 ; на фиг. 6 - разрез Д-Д на фиг, 3; на фиг. 7 - вид Е на фиг. 3; на фиг. 8 - разрез Ж-Ж на фиг, 3; на фиг. 9 - узел I на фиг. 3; на фиг. 10 - разрез 3-3 на фиг. 3; на фиг. 11 - разрез И-И на фиг. 3; на фиг. 12 - вид К на фиг. 3; на фиг. 13 - разрез Л-Л на фиг. 7.
Гидравлический тормоз состоит из корпуса 1, вторичного вала 2, состоящего из полувалов 3 и 4, соединенных между собой посредством дифференциального механизма 5 и кинематически связанных с валом 6 и дополнительным валом 7, посредством клиноременных вариаторов 8 и 9. Узлы гидравлического тормоза смонтированы на раме 10. Вал 6 установлен в корпусе 1 на подшипниках 11. На валу б жестко установлен фланец 12, на котором жестко установлен ротор 13 барабанного типа. На внутренней поверхности ротора 13 шарнир- но установлены лопатки 14 на осях 15 и 16. Лопатки 14 выполнены с переменным сечением в осевом и радиальном направлении (фиг. 10 и 11) с постоянным уменьшением площади поперечного сечения от большего торца 17 лопаток 14 к меньшему торцу 18, при этом ширина лопаток 14 также постоянно уменьшается в осевом направлении.
На фланце 12 установлен нажимной элемент 19 с возможностью осевого перемещения относительно фланца 12. Нажимной элемент 19 подпружинен относительно фланца 12 при помощи пружин 20. На корпусе 1 жестко установлены втулки 21, в которых на осях 22 установлены шестерни 23 и зубчатые рейки 24 с возможностью перемещения относительно своей продольной оси и входящие в зацепление с шестернями 23. Оси 22 выполнены с резьбой, посредством которой на них установлены гайки 25 с возможностью осевого перемещения относительно втулок 21. На гайках 25 на осях 26 установлены подшипники 27 и 28,
взаимодействующие своими наружными кольцами с нажимным элементом 19. Зубчатые рейки 24 соединены траверсой 29, кинематически связанной с винтом 30,
установленным на раме 10. На винте 30 установлена рукоятка 31. На нажимном элементе 19 (фиг. 9) жестко установлены шпонки 32. снабженные штифтами 33, взаимодействующими с винтовыми пазами 34,
выполненными на осях 15 лопаток 14. Фланец 12 снабжен дренажными трубками 35.
В корпусе 1 установлен дополнительный вал 7 на подшипниках 36 и 37, причем подшипник 37 установлен в посадочном месте вала 6. На дополнительном валу 7 на шпонке 38 жестко установлен неподвижный диск 39 звездообразной формы (фиг. 6), на котором жестко установлены радиальные лопатки 40, имеющие в сечении форму, аналогичную форме образующей неподвижного диска 39. На дополнительном валу 7 установлены с возможностью осевого перемещения подвижный опорный диск 41 и подвижные диски 42 и 43, также выполненные
в продольном сечении звездообразной формы.Подвижный опорный диск 41 и подвижные диски 42 и 43 установлены на своих шпонках, взаимодействующих со шпоночным пазом 44 дополнительного вала 7. На
подвижных дисках 42 и 43 жестко установлены радиальные лопатки 45 и 46, выполненные в поперечном сечении звездообразной формы, аналогичной форме образующей неподвижного диска 39, кроме
этого радиальные лопатки 40, 45 и 46, подвижный опорный диск 41 выполнены в сборе телескопическими.
На подвижном опорном диске 41 на осях 47, перпендикулярных к продольной
оси дополнительного вала 7 шарнирно установлены дополнительные элементы 48, имеющие в сечении форму сектора (фиг. 12). Дополнительные элементы 48 имеют плоские рабочие поверхности 48-50, взаимодействующие с рабочей жидкостью при работе тормоза (в зависимости от направления вращения дополнительного вала 7).
На неподвижном диске 39, подвижных дисках 42 и 43 жестко и консольно к
0 ним установлены ограничительные шпильки 51-53, ограничивающиие перемещение в осевом направлении подвижных 42 и 43 и подвижного опорного 41 дисков, кроме этого на подвижных дисках 42 и 43 и подвиж5 ном опорном диске 41 выполнены отверстия, расположенные соосно соответствующим шпилькам 51-53 для свободного перемещения в них шпилек 51-53 при телескопическом складывании в осевом направлении радиальных лопаток 40, 45 и 46 и подвижного опорного диска 41.
На корпусе 1 жестко установлены втулки 54, в которых на осях 55 установлены шестерни 56 и зубчатые рейки 57 с возможностью перемещения относительно своей продольной оси. Оси 55 имеют по одному резьбовому концу 58, на которых установлены гайки 59 с возможностью осевого перемещения относительно втулок 54. На гайках 59 установлены при помощи осей 60 вил- км 61.
На подвижном опорном диске 41 в корпусе подшипника 62 установлены подшипники 63. Корпус подшипника 62 связан с -вилками 61 посредством пантографов 64 и осей 65 и 66. Пантограф состоит из планок 67 и 68, соединенных между собой при помощи осей 69 (фиг. 7, 13). Кроме этого, пантографы присоединены при помощи осей 70 к плите 71, жестко установленной на ступице 72 корпуса.
Зубчатые рейки 57 соединены между собой траверсой 73, кинематически связанной с винтом 74, установленным на раме 10. На винте 74 установлена рукоятка 75. Дифференциальный механизм 5 состоит из кожуха 76 (фиг. 12 и 13), корпуса дифференциала 77, и установленных в нем двух конических шестерен 78 м сателлитов 79, Шестерни 78 жестко соединены с пол- уваяами 3 и 4. Корпус дифференциала 77 имеет возможность стопорения относительно кожуха 76, жестко установленного на раме 10 при помощи винтов 80.
На полувалах 3 и 4 установлены кулачковые полумуфты 81 с возможностью стопорения их на полувалах 3 и 4 при помощи болтов 82. Кулачковые полумуфты 81 входят в зацепление с кулачками, выполненными на торцовых поверхностях ступиц 83, одна из которых установлена на шлицах корпуса дифференциала 77, а другая установлена на шлицах крышки дифференциала 84, жестко установленной на корпусе дифференциала 77. Кулачковые полумуфты могут занимать два положения на полувалах 3 и 4 в состоянии зацепления с кулачками корпуса дифференциала 77 и крышки дифференциала 84; в свободном от зацепления состоянии.
В корпусе 1 имеются отверстия для подвода и отвода рабочей жидкости (воды).
Гидравлический тормоз работает следующим образом.
Испытываемая сборочная единица подключается к валу 7 (элементы присоединения тормоза к испываемой сборочной единице на чертежах не показаны).
При работе вращение от дополнительного вала 7 (например, по стрелке Т) передается на подвижный опорный диск 41, подвижные диски 42 и 43, неподвижный диск 39, радиальные лопатки 40, 46 и 45. Одновременно с этим вращение от дополнитель- 5 ного вала 7 передаётся через вариатор 8 полувал 3, дифференциальный механизм 5. полувал 4, вариатор 9, вал 6, фланец 12 на ротор 13 с лопатками 14. При этом возможны два варианта работы тормоза. 10 В первом варианте корпус дифференциала 77 расстопаривают относительно кожуха 76 и вводят в зацепление кулачковые, полумуфты 81 с кулачками корпуса дифференциала 77 и крышки дифференциала 84. 5 При этом вращение дополнительного вала 7 будет передаваться через вариатор 8, полувал 3, кулачковую полумуфту 81, корпус дифференциала 77, крышку дифференциала 84, вторую кулачковую полумуфту 81 (уста0 новленную на полувале 4) на полувал 4 и далее через вариатор 9 на ротор 13, т.е. вращение дополнительного вала 7 и ротора 13 будет осуществляться в одну сторону. Относительную скорость вращения допол5 нительного вала 7 и ротора 13 регулируют при помощи вариаторов 8 и 9 (механизмы управления вариаторами 8 и 9 на чертежах не показаны). В принципе управление вариаторами 8 и 9 может быть осуществлено при
0 помощи силового устройства типа гидроцилиндра или силового винта).
Во втором варианте корпус дифференциала 77 стопорят относительно кожуха 76 при помощи винтов 80, а кулачковые полу-
5 муфты 81 выводят из зацепления с корпусом дифференциала 77 и крышкой дифференциала 84. При этом вращение дополнительного вала 7 будет передаваться через вариатор. 8, полувал 3 на шестерню 78, сателлиты 79
0 и вторую шестерню 78, установленную на полувалу 4, так так вращение полувалов 3 и 4 будет осуществляться в противоположные стороны, то и вращение дополнительного вала 7 и ротора 13 также будет осуществ5 ляться в противоположные стороны. Относительную скорость вращения дополнительного вала 7 и ротора 13 и в этом случае регулируют при помощи вариаторов 8 и 9.
Тормозной момент в обоих случах со0 здается за счет сил трения торцовых повер- хностей неподвижного диска 39 и подвижного опорного диска 41 о рабочую жидкость, внутреннего сопротивления рабочей жидкости в зазоре между радиальны5 ми лопатками 40, 46 и 45, подвижного опорного диска 41 и лопатками 14 за счет разности скоростей вращения ротора 13 и дополнительного вала 7, сил динамического сопротивления движению лопаток 14 в рабочей жидкости.
Кроме этого гидравлический тормоз развивает дополнительный тормозной момент за счет дополнительного поглощения энергии при принудительном прокачивании жидкости в осевом направлении в корпусе 1 от входного до выходного отверстия для жидкости. Прокачка жидкости в oceecr.i направлении осуществляется как лопатками 14, так и подвижным опорным диском 41 с дополнительными элементами 48 и происходит следующим образом.
Поскольку лопатки 14 выполнены переменной ширины, то их боковые поверхности (фиг, 10) всегда располагаются под определенным углом атаки,равным (90- а /2)° к вектору набегающего потока жидкости, в результате чего жидкость принудительно увлекается в осевом направлении лопатками 14 независимо от направления вращения ротора 13 (в одном случае с жидкостью динамически взаимодействует одна поверхность, а при изменении направления вращения ротора 13 другая поверхность.
Кроме того, при вращении дополнительного вала 7 например по стрелке Т (фиг, 3) дополнительные элементы 48 под взаимодействием набегающего потока жидкости развернутся на своих осях 47, при этом дополнительные элементы 48 прижмутся одной своей рабочей поверхностью 50 к торцовой поверхности подвижного опорного диска 41, а другая рабочая поверхность 49 дополнительных элементов 48 будет расположена к набегающему потоку жидкости под углом атаки /3 , в результате чего жидкость будет увлекаться в осевом направлении при вращении дополнительного вала 7. При изменении направления вращения дополнительного вала 7 (при обеспечении испытания сборочных единиц с реверсированием) дополнительные элементы 48 под взаимодействием потока набегающей жидкости повернутся в другую сторону, при этом рабочие поверхности 50 располагаются к набегающему потому под углом атаки ft.
Таким образом, независимо от направления вращения дополнительного вала 7 и ротора 13 жидкость будет прокачиваться в ос евом направлении, при этом создается дополнительный тормозной момент и обеспечивается стабильный тепловой режим работы вследствие наличия постоянного протока жидкости в корпусе 1.
Регулировку тормозного момента осуществляют следующим образом, .
При вращении рукоятки 31 винт 30 начнет вворачиваться в резьбовое отверстие, перемещая траверсу 29 и зубчатые рейки 24,
которые взаимодействуя с шестернями 23, повернут их на определенный угол. При этом гайки 25, взаимодействуя с резьбой осей 22, переместятся в осевом направлении. Далее осевое усилие от гаек 25 передается через, оси 26, подшипники 27 и 28, нажимной элемент 19 (сжимая пружины 20), шпонки 32 на штифты 33, которые, взаимодействуя с винтовыми пазами 34. повернут
0 оси 15 и лопатки 14 на определенный угол, изменяя угол атаки лопаток 14 (в плоскости, перпендикулярной продольной оси тормоза) и изменяя зазор между ними и радиальными лопатками 40, 46 и 45, соответственно
5 изменяя тормозной момент.
При вращении рукоятки 31 в обратном направлении, нажимной элемент 19 со шпонками 32 и штифтами 33 переместятся в противоположную сторону под взаимо0 действием пружин 20, разворачивая лопатки 14 в исходное положение.
При вращении рукоятки 75 винт 74 начнет вворачиваться в резьбовое отверстие, перемещая траверсу 73 и зубчатые рейки 57,
5 которые,взаимодействуя с шестернями 56, повернут их на определенный угол. При этом гайки 59,взаимодействуя с резьбовыми концами 58 осей 55,переместятся в осевом направлении. Далее усилие от гаек 59 пере0 дается через оси 60, вилки 61, оси 66 на пантограф 64. При этом оси 66 начнут перемещаться параллельно продольной оси тормоза, (на фиг. 7 вправо), а оси 70 будут оставаться на месте. Пантограф 64 увеличит
5 свою первоначальную длину I (оси 65 начнут перемещаться влево) и, воздействуя через оси 65 на корпус подшипника 62 и далее через подшипники 63 на опорный диск 41, переместит его влево по дополнительному
0 валу 7. Подвижный опорный диск 41 начнет перемещаться во внутреннюю полость радиальных лопаток 45, которые, в свою очередь, начнут перемещаться во внутреннюю полость радиальных лопаток 46, и т.д., т.е.
5 они будут телескопически складываться до положения, показанного на фиг. 3 пунктирными линиями.
При этом шпильки 51, 52 и 53 будут входить в соответствующие отверстия по0 движных дисков 42 и 43 и подвижного опорного диска 41. Суммарная активная площадь радиальных лопаток 40, 45 и 46 и подвижного опорного диска 41 уменьшится, а следовательно, и тормозной момент также
5 уменьшится.
При обратном вращении рукоятки 75 подвижный опорный диск 41, промежуточные диски 42 и 43 начнут перемещаться в другую сторону по дополнительному валу 7 (последовательно взаимодействуя с ограничитальными шпильками 51, 52 и 53), занимая исходное положение.
Регулировку тормозного момента можно осуществить путем изменения направления вращения ротора 13 относительно дополнительного вала 7, а также изменяя скорость вращения их относительно друг друга.
Формула изобретения Гидравлический тормоз, содержащий корпус, заполненный рабочей жидкостью, установленный в нем ротор с валом и лопатками, смонтированными с возможностью поворота вокруг осей посредством механизма осевого перемещения и промежуточных элементов для преобразования осевого перемещения во вращательное, дополнитель- ный вал с установленными на нем неподвижными и подвижными в осевом направлении дисками с жестко закрепленны- ми на них радиальными лопатками и дополнительным механизмом осевого перемещения, кинематически связянным с одним из подвижных дисков, вторичный вал, кинематически связанный с валом ротора и
дополнительным валом, отличающий- с я тем, что, с целью расширения функциональных возможностей и повышения надежности, подвижные и неподвижные диски выполнены звездообразной формы, радиальные лопатки выполнены в поперечном сечении с формой, аналогичной подвижным и неподвижным дискам, лопатки ротора выполнены с переменным сечением в осевом и радиальном направлениях и с постоянно уменьшающейся шириной от большего торца к меньшему, один из подвижных дисков выполнен с дополнительными элементами в виде секторов, шарнирно установленными на нем с возможностью ограниченного поворота относительно своих осей, вторичный вал выполнен в виде двух полувалов, соединенных между собой посредством дифференциального механизма и кинематически связанных с валом ротора и дополнительным валом посредством клиноременных вариаторов, при этом корпус дифференциального механизма установлен с возможностью стопоре- ния.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТОРНО-ПУЛЬСАЦИОННЫЙ АКУСТИЧЕСКИЙ АППАРАТ | 2007 |
|
RU2366497C2 |
| РОТОРНО-ПУЛЬСАЦИОННЫЙ АКУСТИЧЕСКИЙ АППАРАТ | 2005 |
|
RU2305005C2 |
| Рекуперативный тормоз | 1984 |
|
SU1318754A1 |
| Водоохладитель | 1990 |
|
SU1793183A1 |
| Бесступенчатая силовая передача для транспортных средств | 1986 |
|
SU1642146A1 |
| Гидравлический тормоз | 1986 |
|
SU1386774A1 |
| Аэромобиль | 2016 |
|
RU2617000C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2001 |
|
RU2223199C2 |
| Аэродинамическое судно | 2016 |
|
RU2611676C1 |
| Трансмиссия автомобиля | 1980 |
|
SU961551A3 |
Изобретение относится к машиностроению и может быть использовано в гидравлических тормозах при испытаниях двигателей и элементов трансмиссий машин. Цель - расширение функциональных возможностей тормоза и повышение надежности путем обеспечения возможности реверсирования валов объектов испытания, повышение стабильности теплового режиК V гв 13 1 Оу.ЛД JlF п ма и обеспечение пространственной жесткости лопаток тормоза. В корпусе 1 установлен основной вал с ротором (Р) 13. На Р 13 шарнирно установлены лопатки 14, выполненные с переменным сечением в осевом и радиальном направлениях. На дополнительном валу установлены неподвижный диск 39, подвижный опорный диск 41 и подвижные диски 42 и 43 с радиальными лопатками 40,45 и 46, перемещаемые в осевом направлении посредством пантографов 64. Основной и дополнительный валы кинематически связаны посредством двух полувалов с дифференциалом. При вращении Р 13 в прямом направлении и при реверсе рабочая жидкость прокачивается в осевом направлении, что обеспечивает стабильность теплового режима гидротормоза. Радиальные лопатки 40, 45 и 46 выполнены звездообразной формы, что обеспечивает их жесткость и эффективность торможения при реверсе. 13 ил, J-L и # У Ј О ъ о ел чэ ШигЗ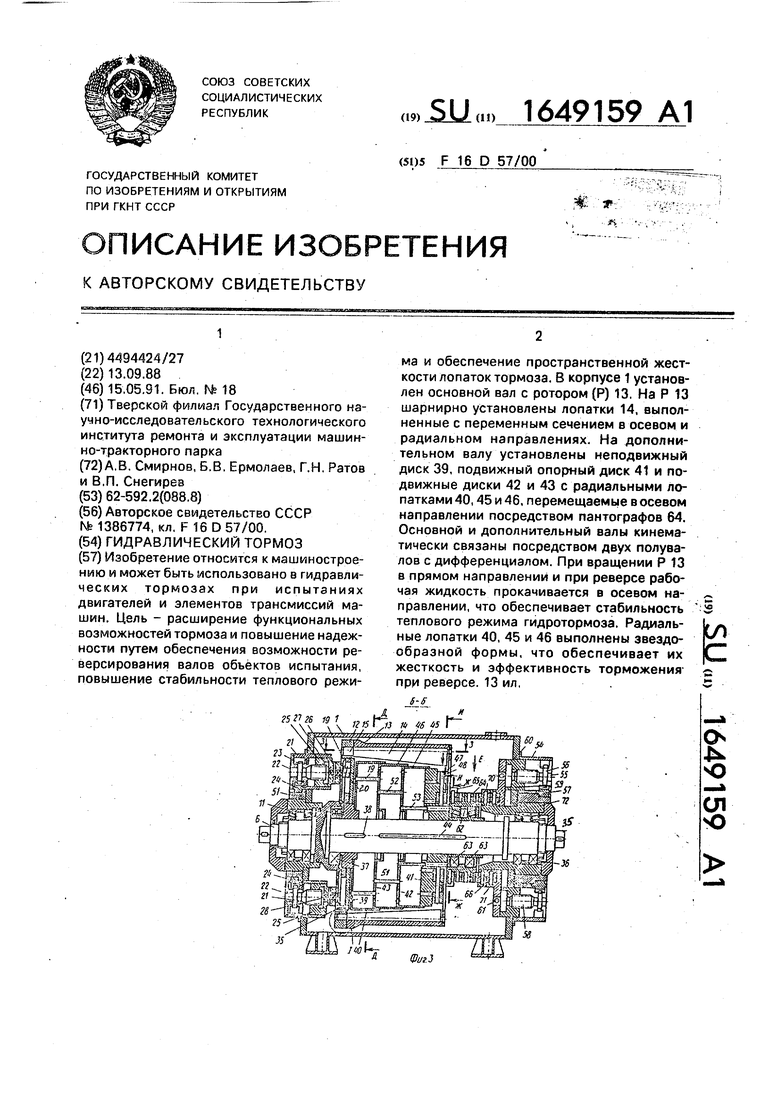
Фиг.1
74
1649159
ВидА
10
№и. 2
81
82
7884 19 77 Фиг.4
29 31
76
вг
9 гп$
6Ј
y-v
JW
$Mtf)
J-J
з-э
(Риг. ю
Щк W
И-И
Щи г. 11
JI-J
Фиг. 13
| Гидравлический тормоз | 1986 |
|
SU1386774A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
