При определении силы тяжести на подвижных носителях (надводных кораблях, самолетах) известными способами необходимо вводить поправки в данные измерения, исключающие влияние наклонов и ускорений, испытываемых прибором в процессе измерений. Компенсация номех осуществляется, как правило, по окончании всего цикла наблюдений, что затрудняет получение истинных результатов в процессе измерений.
Особенность предложенного способа заключается в том, что маятнику придают чувствительность к наклонам в плоскости его колебаний, причем период колебания маятника находится в квадратичной зависимости от угла наклона с заданным коэффициентом пропорциональности. Эффект остаточного влияния учитывают посредством акселерометров и наклономеров.
Чувствительность маятника к наклонам в плоскости колебаний может быть достигнута применением ножевидной опоры специальной формы либо упругого подвеса (пендельфедера), параметры которого рассчитывают так, что изменение периода колебаний при наклоне компенсирует влияние возмущ,ающих ускорений. В обоих с.лучаях маятниковый прибор должен быть установлен на горизонтальную (например, гиростабилизированную) платформу.
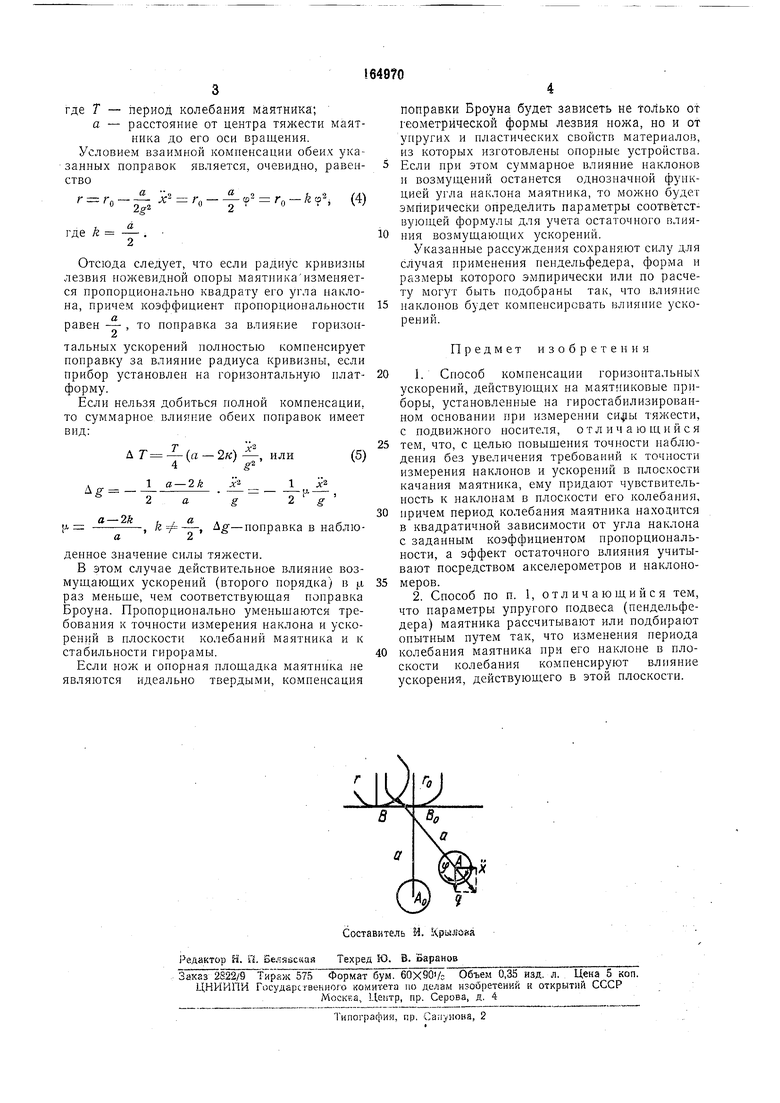
На чертеже дается графическая иллюстрация предложенного способа.
Если период маятника мал но сравнению с периодом действующего ускорения, а ось маятника постоянно совпадает с равнодействующей силы тяжести и вектора ускорения х, то при х 0 центр тяжести маятника находится в точке Л:о, а проекция линии опоры - в точке BQ. Когда , маятник наклоняется на
угол а, равный
(1)
f arc tg - , g
где g - ускорение силы тяжести, центр тяжести маятника перемещается в точку А, а проекция линии опоры - в точку В. Точкам BO и В соответствуют радиусы кривизны /о и г; в общем случае переменный радиус г
является функцией угла нак.чона ф.
Как известно, поправка за конечную величину радиуса кривизны равна.
A7-,ir,
(2)
25
а поправка за влияние горизонтальных ускорений (поправка Броуна) равна где Т - период колебания маятника; а - расстояние от центра тяжести маятника до его оси вращения. Условием взаимной компенсации обеих указанных поправок является, очевидно, равенствог г - i /о - о - , (4) где k Отсюда следует, что если радиус кривизны лезвия ножевидной онорн маятникаизменяется пропорционально квадрату его угла наклона, причем коэффициент пропорциональности равен - , то поправка за влияние горизонтальных ускорений полностью компенсирует поправку за влияние радиуса кривизны, если прибор установлен на горизонтальную платформу. Если нельзя добиться полной компенсации, то суммарное влияние обеих поправок имеет вид: Тх Д Т - (а - 2к) -, или 4 1 а -2k - - 2 k f g-иоправка в наблюl f -/-. денное значение силы тяжести. В этом случае действительное влияние возмущающих ускорений (второго порядка) в (д, раз меньше, чем соответствующая поправка Броуна. Пропорционально уменьшаются требования к точности измерения наклона и ускорений в плоскости колебаний маятника и к стабильности гирорамы. Если нож и оиорная площадка маятпика не являются идеально твердыми, компенсация поправки Броуна будет зависеть не только от геометрической формы лезвия ножа, но и от упругих и пластических свойств материалов, из которых изготовлены опорные устройства. Если при этом суммарное влияние наклонов и возмущений останется однозначной функцией угла наклона маятника, то можно будет эмпирически определить параметры соответствующей формулы для учета остаточного влияиия возмущаюндих ускорений. Указанные рассуждения сохраняют силу для случая применения пендельфедера, форма и размеры которого эмпирически или по расчету могут быть подобраны так, что влияние наклонов будет компенсировать влияние ускорений. Предмет изобретения 1.Способ компенсации горизонтальных ускорений, действующих на маятниковые нриборы, установленные на гиростабилизированном основании при измерении си41Ь тяжести, с подвижного носителя, отличающийся тем, что, с целью новыщення точности наблюдения без увеличения требований к точности измерения наклонов и ускорений в нлоскости качания маятника, ему придают чувствительность к наклонам в плоскости его колебания, причем период колебания маятника находится в квадратичной зависимости от угла наклона с заданным коэффициентом нронорциональности, а эффект остаточного влияния учитывают посредством акселерометров и наклономеров. 2.Способ по п. 1, отличающийся тем, что параметры упругого подвеса (пендельфедера) маятника рассчитывают или подбирают опытным путем так, что изменения периода колебания маятника ири его наклоне в плоскости колебания комненсируют влияние скорения, действующего в этой плоскости.
| название | год | авторы | номер документа |
|---|---|---|---|
| НОЖЕВИДНАЯ ОПОРА) ДЛЯ ГРАВИМЕТРИЧЕСКОГОМАЯТНИКА | 1964 |
|
SU164971A1 |
| Гиростабилизированный кварцевый гравиметр и способ его калибровки | 2015 |
|
RU2619132C1 |
| СПОСОБ ОТЛАДКИ БОРТОВОГО ГРАВИТАЦИОННОГО ГРАДИЕНТОМЕТРА | 1989 |
|
SU1823661A1 |
| ГРАВИМЕТР ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ С ДВИЖУЩИХСЯ СУХОПУТНЫХ НОСИТЕЛЕЙ В РЕЖИМЕ КРАТКОВРЕМЕННЫХ ОСТАНОВОК | 1993 |
|
RU2056641C1 |
| ГРАВИМЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНЕНИЯ ОТВЕСНОЙ ЛИНИИ В ОКЕАНЕ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2007 |
|
RU2348009C1 |
| ВЙВЛЙОТЕГСА | 1966 |
|
SU184465A1 |
| СПОСОБ И УСТРОЙСТВО ПОСТРОЕНИЯ НЕВОЗМУЩАЕМОЙ БЕЗГИРОСКОПНОЙ ВЕРТИКАЛИ | 2002 |
|
RU2258907C2 |
| АВТОНОМНЫЙ ГРАВИМЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА ПОДВОДНОГО ОБЪЕКТА В ПОДВОДНОМ ПОЛОЖЕНИИ | 2009 |
|
RU2399025C1 |
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2005 |
|
RU2282147C1 |
| ГРАВИМЕТР ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ С ДВИЖУЩИХСЯ НОСИТЕЛЕЙ | 1993 |
|
RU2056643C1 |
