1
Изобретение относится к области автоматизации штамповочного производства и используется для подачи заготовок на многопозиционных листоштамповочных прессах.
Известны грейферные устройства, содержащие размещенные с двух сторон от подаваемых заготовок грейферные линейки, приводимые в возвратно-поступательное движение вдоль оси подачи заготовок посредством узла продольного перемещения, выполненпого в виде планетарного механизма, состоящего из вращающегося от привода пресса водила с сателлитом, обкатывающимся вокруг неподвижного центрального колеса и несущим кривощипный палец, связанный с линейками с помощью передаточного механизма. Линейки получают противоположно направленные возвратно-поступательные движения перпендикулярно направлению подачи заготовок от того же привода через кулачково-рычажный механизм узла поперечного перемещения линеек, ведущее звено которого установлено на общем приводном валу с упомянутым водилом.
Однако в известных устройствах невозможно осуществить переналадку циклограммы, которая обычно рассчитывается, исходя из максимальных параметров щтампуемых изделий. При щтамповке изделий с другими параметрами циклограммы работа устройства становится нерациональной из-за излишней длительности интервалов цикла, затрачиваемых на выстой грейферных линеек и их холостой ход.
Цель изобретения - обеспечение возможности переналадки циклограммы его работы в зависимости от параметров штампуемых изделий.
Зто достигается тем, что в предлагаемом устройстве передаточный механизм, связывающий узел продольного перемещения с грейферными линейками, выполнен в виде кривощипно-щатунного механизма с регулируемым радиусом кривошипа, кривошипный палец его планетарного механизма установлен с возможностью регулировочного перемещения вдоль радиуса сателлита, а ведущее звено узла поперечного перемещения грейферных линеек выполнено в виде набора дисковых кулачков, соосно установленных на упомянутом приводном валу с возможностью регулировочного перемещения вдоль оси последнего.
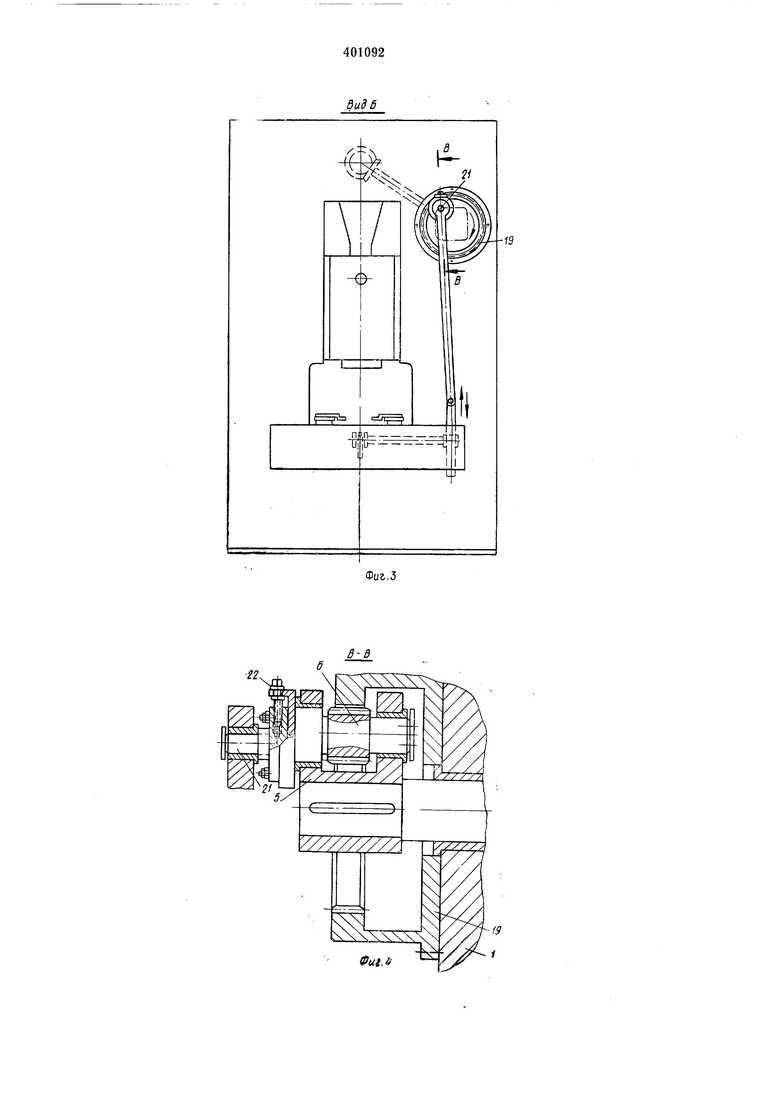
На фиг. 1 показан общий вид многопозиционного пресса-автомата с предлагаемым подающим устройством; па фиг. 2 - разрез по А-А на фиг. 1; на фиг. 3 - вид по стрелке Б на фиг. 1; па фиг. 4 - разрез по В-В на фиг. 3; на фиг. 5 - разрез по Г-Г на фиг. 1; на фиг. 6 - разрез по Д-Д на фиг. 1; на
фиг. 7 - траектории движения пальца сателлита; на фиг. 8 - циклограммы совместной работы устройства и пресса. На станине 1 пресса-автомата на уровне ползуна смонтирован вал 2 привода автоподач, связанный с главным валом зубчатой передачей 3. На валу 2 установлены блок кулачков 4 и водило 5 с сателлитом-колесом 6 (см. фиг. 4). Кулачковый блок (см. фиг. 6) содержит подвижную вдоль вала ступицу 7; втулку 8, связанную со ступицей с помощью зубчатого зацепления, и иабор кулачков 9, сидящих на втулке неподвижно на шпоике 10. Кулачки с помощью шпилек 11 прикреплены к ступице 7. Кулачковый блок перемещается на валу по шпонке 12 и фиксируется в определенном положении регулировочной гайкой 13. Кулачки контактируют с роликом коромыслового толкателя 14, установленным неподвижно на качающемся валу 15. Толкатель 14 пружиной 16 постоянно поджимается к одному из кулачков 9. Толкатель 14 и рычаг 17 связаны с грейферными линейками 18. Сателлит 6 (см. фиг. 4) находится в зацеплении с неподвижным зубчатым колесом 19, установленным на станине пресса. Наружный конец сателлита оканчивается флаицем 20, на котором закреплен палец 21. Положение пальца на сателлите 6 устанавливается и фиксируется регулировочным винтом 22. Налец связан с шатуном 23, противоположный конец которого соединен с рейкой 24. Рейка сцеплена с шестерней 25 вала 26, на противоположном конце которого установлен кривошип 27, связанный с кареткой 28 с помощью шатуна 29 (см. фиг. 2). Грейферная система автомата работает следующим образом. -Нри вращении главного вала через шестеренчатую передачу синхронно вращается вал привода автоподач. Установленные на нем кулачковый блок, водило с сателлитом и палец 21 являются приводными элементами грейферных линеек соответственно в поперечном (от кулачков) и в продольном (от пальца 21) направлениях. Движение от кулачков на грейферные линейки передается через роликовый толкатель 14 и рычаг 17, установленный неподвижно на качающемся валу 15. Движение от пальца 21 на каретку грейферных линеек передается с помощью шатуна 23, зубчато-реечной передачи (рейка 24, шестерня 25 и вал 26) и кривошипно-шатунного механизма (кривошип 27 и шатун 29). Регулирование интервалов цикла устройства и выбор рациональной циклограммы осуществляется следующим образом. Интервалы цикла продольного перемещения лииеек (время движения и время остаиова в крайних положениях) устанавливаются с помощью подвижного пальца 21 на сателлите и регулировки радиуса кривошипа 27. При смещении пальца 21 относительно центра вращения сателлитов 6 его траектория для каждого фиксированного положения меняется (см. фиг. 7) от круга (кривая а) до скругленного в углах квадрата (кривая е). Нромежуточные кривые Ь, с, d тл. т. д. отличаются от кривых а и е величиной прямолинейных участков траектории пальца 21. Величина прямолинейных участков изменяется (см. фиг. 8) от О (кривая а) до максимального значения (кривая е). Горизонтальные снрямленные участки указанных кривых вызывают во время работы пресса выстой линеек в их крайних продольных положениях, на остальных участках траектории пальца 21 обеспечивается продольный (прямой и обратный ход). Описанные траектории возможны только при определенном соотношении колес 6 и 19 и величины смещения нальца 21 относительно центра вращения сателлита. В данном случае соотношение колес 6 и 19 взято 1 : 4, а величина смещения О-0,4 от радиуса сателлита. Таким образом, при изменеНИИ местоположения пальца на сателлите измёняются интервалы цикла продольного хода грейфера. Однако при этом незначительно изменяется величина хода грейфера, которая должна оставаться постоянной в любых случаях. Для обеспечения постоянства шага подачи при регулироваиии цикла на кривошипе 27 устаиовлеиа эксцеитричная ось (не показана). которая может поворачиваться относительно цапф и фиксироваться в нужном положении. Интервалы цикла поперечного перемещения линеек устанавливаются кулачками 9 различного профиля. Перемещение кулачкового блока вдоль вала осуществляется при отведенном толкателе (механизм отвода толкателя не показан). Профили кулачков отличаются между собой интервалами выстоя и движения и фазовым смещением (фазовое смещение -это время или угол, отсчитанные от крайнего положения инструмента до начала поперечного хода линеек). Поэтому каждый кулачок может выполнить лишь один из вариантов цикла поперечного хода линеек. При наличии различных вариантов цикла продольного и ноперечного хода грейфера их сочетание не может быть произвольным. На фиг. 8 показана примерная циклограмма автомата с более или менее рациональным сочетаиием интервалов цикла инструмента (кривая I) и линеек (кривые П и 111). Сочетание интервалов цикла П, а и П1, а обеспечивают наиболее плавную и спокойную работу грейферной системы, так как относительное время интервалов движения в этом варианте наибольшее (в 1,3-1,5 раза больше обычного), что позволяет увеличить производительность автомата и его надежность, Сочетание интервалов цикла П,с и 1П,с обеспечивает более глубокую вытяжку, т. е. обладает более широкими технологическими возможностями, хотя кинематические характеистики этого варианта несколько хуже, чем
в первом варианте вследствие уменьшения относительного времени движения линеек.
Сочетание II, в и III, в является промежуточным вариантом.
Конечно, возможны и другие сочетания как в качественном, так и в количественном отношении. Вариант а наиболее целесообразно применять при штамповке низких и плоских деталей типа сепараторов к подшипникам; вариант а при штамповке деталей средних размеров; вариант с при штамповке высоких и габаритных деталей.
Предмет изобретения
Грейферное устройство для подачи заготовок в рабочую зону пресса, содержаш,ее размеш,енные с двух сторон от подаваемых заготовок грейферные линейки, приводимые в возвратно-поступательное движение по направлению подачи заготовок посредством узла продольного перемещения, выполненного в виде планетарного механизма, состояш,его из враш,аюш,егося от привода пресса водила с сателлитом, обкатываюш,имся вокруг неподвижного центрального колеса и несуш,им кривошипный
палец, связанный с помощью передаточного механизма с линейками, получающими противоположно направленные возвратно-поступательные движения перпендикулярно направлению подачи заготовок от того же привода через кулачкоБо-рычажный механизм узла поперечного перемещения, ведущее звено которого установлено на общем приводном валу с упомянутым водилом, отличающееся тем,
что, с целью обеспечения возможности переналадки циклограммы его работы в зависимости от параметров штампуемых изделий, передаточный механизм, связывающий узел продольного перемещения с грейферными линейками, выполнен в виде кривошипно-шатунного механизма с регулируемым радиусом кривошипа, кривошипный палец планетарного механизма того же узла установлен с возможностью регулировочного перемещения вдоль радиуса сателлита, а ведзщее звено узла поперечного перемещения грейферных линеек выполнено в виде набора дисковых кулачков с различной формой их рабочих профилей, соосно установленных на упомянутом приводном
валу с возможностью регулировочного перемещения вдоль оси последнего.


| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДАЮЩЕЕ УСТРОЙСТВО | 1995 |
|
RU2080953C1 |
| Грейферное подающее устройство к прессу | 1989 |
|
SU1676724A1 |
| ГРЕЙФЕРНАЯ ПОДАЧА К ШТАМПОВОЧНОМУ ПРЕССУ | 1998 |
|
RU2146618C1 |
| Транспортирующее устройство | 1985 |
|
SU1326375A1 |
| ГРЕЙФЕРНОЕ УСТРОЙСТВО ДЛЯ ПОДАЧИ И ПЕРЕНОСА ЗАГОТОВОК ПО ПОЗИЦИЯМ ШТАМПА ПРЕССА | 1992 |
|
RU2028856C1 |
| Грейферный перекладчик к штамповочному прессу | 1983 |
|
SU1159699A1 |
| Грейферная подача к штамповочному прессу | 1985 |
|
SU1299679A1 |
| МНОГОПОЗИЦИОННЫЙ ПРЕСС | 1992 |
|
RU2013173C1 |
| ПРЕСС КРИВОШИПНЫЙ | 1998 |
|
RU2146197C1 |
| ГРЕЙФЕРНАЯ ПОДАЧА К ШТАМПОВОЧНОМУ ПРЕССУ | 1995 |
|
RU2090291C1 |


6
Фиг. 2
Ж
}
/7//
й-Л
а
т
13
Фиг. б
l a
