1
(21)4655244/28
(22) 27 02 89
(46)300591 Ьюл №20
(71) Ульяновский политехнический институт
(2) В А Мишин и А А Новиков
(53)531 717(0888)
(56)Авторское свидетельство СССР N- 196377, кл G01 В 5/14 1967
(54) СПОСОБ БЕСКОНТАКТНОГО ОПРЕДЕЛЕНИЯ ЗАЗОРА В ВЕРХНЕЙ КЕРНОВОИ ОПОРЕ ПРИБОРА
(57)Изобретение относится к области изме рительнои техники и может быть использовано при автоматизации контроля прчбо ров содержащих подвижные части в керчо вых опорах например стрелочных электроизмерительных приборов Цель изо бретения - снижение трудоемкости и повы шение точности измерения зазора При перемещении подвижной части прибора под действием ее собственного веса из одного граничного положения в опорах в другое по воротом изделия вокруг горизонтальной оси с постоянной скоростью измеряют время перемещения подвижной части по кото рому определяют величину зазора в опо ре 1 э п ф лы 2 ил
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ОСЕВОГО ЗАЗОРА В КЕРНОВЫХ ОПОРАХ ЭЛЕКТРОИЗМЕРИТЕЛЬНОГО ПРИБОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2171966C2 |
| Способ определения массогабаритных характеристик электроизмерительного прибора | 1987 |
|
SU1492292A1 |
| Устройство для измерения осевого зазора в опорах | 1980 |
|
SU934193A1 |
| ПОВОРОТНАЯ УСТАНОВКА | 1968 |
|
SU231181A1 |
| Стенд для балансировки подвижной части электроизмерительного прибора | 1983 |
|
SU1142743A1 |
| Устройство для измерения непрямолинейности объекта | 1984 |
|
SU1320665A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРОПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2087876C1 |
| Способ регулировки осевого зазора в керновых опорах электроизмерительного прибора и устройство для его осуществления | 1989 |
|
SU1760366A1 |
| ДВУХОСНЫЙ ПОВОРОТНЫЙ СТЕНД | 2018 |
|
RU2684419C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
Изобретение относится к измеритель ной технике и может быть использовано при автоматизации контроля изделий содержа щих подвижные части в керновых опорах например стрелочных электроизмеритель ных приборов
Целью изобретения является снижение трудоемкости и повышение точности изме рения зазора
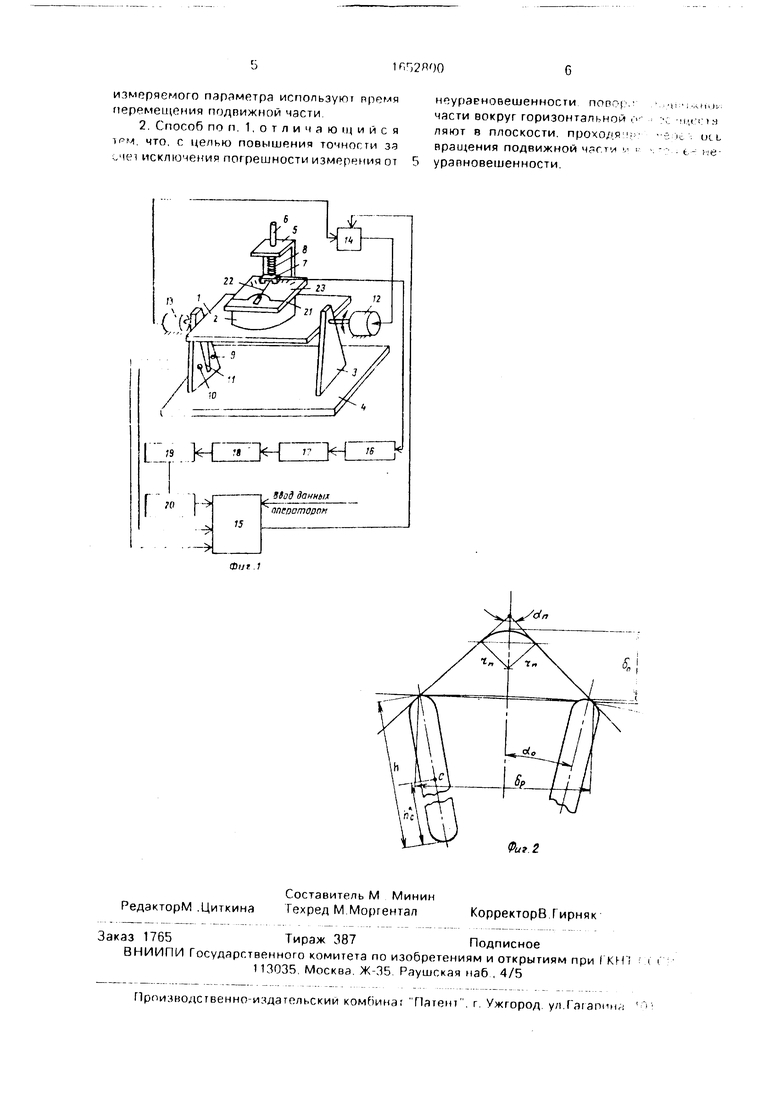
На фиг 1 представлено устройство для определения зазора на фиг 2 - расчетная схема способа измерения
Способ реализуется посредством уст ройства, работающего в автоматическом режиме, которое содержит поворотную платформу 1 со стаканом 2 для закрепления прибора например электроизмерительного установ ленную с возможностью поворота вокруг го ризонтальной оси на стойках 3 плиты 4 На платформе 1 закреплен кронштейн 5 в отверстие которого вставлен стержень 6 на
конце которого установлен фотодатчик 7 ле ремещения прижимаемый установленной на стержне 6 пружиной 8 к прибору
На одной из стоек 3 расположены фото датчики 9 и 10 между которыми находится стержень 11, жестко связанный с платфор мой 1 Для поворота платформы 1 служит двигатель 12 Для контроля величины тло вой скорости поворота платформы 1 приме нен датчик 13 угловой скорости Двигатель 12 наклона платформы 1 соединен с выхо дом блока 14 стабилизации угловой скоро сти вращения платформы 1 а его входы соединены с блоком 15 обработки информа ции и управления и датчиком 13 угловой скорости Выход фотодатчика 7 чррез филь тры низкой 16 и высокой 17 частоты и усили тель 18 соединен с входом формирователя 19 импульсов выход которою соединен с входом измерителя 20 дпитрп( иогти им пульса связанного с блоком 1r оды фп
А
сл го
00
о о
тодатчиков9 и 10 также подключены к блоку 15 обработки информации и управления В качестве блока 15 может быть использована микроЭВМ. работающая в реальном масштабе времени и имеющая соответствующие периферийные устройства Фотодатчики 7, 9 и 10 могут быть образованы фотопарой фотодиод - фототранзистор. В качестве измерителя 20 длительности импульса можно использовать частотомер. Датчик 13 угловой скорости тахогенератор. например двигатель постоянного тока. Блоки 16-19 выполняются по общеизвестным схемам, причем блок 19 - компаратор, например, на базе операционных усилителей. Блок 14 стабилизации угловой скорости к вращения двигателя 12 также выполняется по известным структурам, где сигнал с датчика 13 является сигналом обратной связи, а сигнал с блока 15 управления - уставкой.
Устройство работает следующим образом.
Устанавливают прибор 21 в стакан 2 платформы 1 так, чтобы стрелка 22 прибора 21 находилась в пазу фотодатчика 7 переме щения, который предварительно поднима ют с помощью стержня 6. При этом фотодатчик 7 ориентируют так, чтобы его оптическая ось была параллельна горизонтальной оси поворота платформы 1, тогда плоскость наклона наклона платформы 1 будет проходить через ось вращения подвижной части и стрелку 22 прибора 21. После этого опускают стержень 6 и пружиной 8 прижимают фотодатчик 7 к шкале 23 прибора 21. Далее вводят в память блока 15 паоа- метры подвижной части и керновой опоры контролируемого прибора 21,величину скорости k поворота платформы 1 и программу расчета.
Вначале блок 15 выдает сигнал на блок 14, в результате чего двигатель 12 поворачивает платформу 1 до тех пор, пока стержень 11 не войдет в зону видимости одного из фотодатчиков 9 или 10. которые в этом случае формируют сигнал для блока 15 об окончании поворота. В результате ось вращения подвижной части прибора 21 отклоняется от вертикали на угол Оо (фиг. 2), при этом нижняя часть находится в первом граничном положении. Затем блок 15 выдает сигнал на блок 14 о повороте платформы 1 в другую сторону с постоянной скоростью k, который осуществляют до тех пор, пока на блок 15 не поступит сигнал от фотодатчиков 9 или 10, свидетельствующий о том, что платформа 1 повернута в другую сторону на тот же угол По . Во время поворота платформы 1 подвижная часть, а вместе с ней и
стрелка 22 под действием соЫ.твенниго ВР са совершают по отношению к опорам перемещение в другое граничное положение в плоскости, проходящей через ось вращения
и стрелку 22 Этот импульс перемещения длительностью г преобразуют фотодатчиком 7 в электрический импульс, который фильтруют, усиливают и подают на формирователь 19 прямоугольного импульса, длительность которого измеряют блоком 20, преобразуют в код и передают в блок 15 обработки информации, который вычисляет величины радиального ftp и осевого (50 зазоров и выдает их на индикацию и печать
Вычисление радиального зазора (5Р в
опоре осуществляют по Формуле
. h -k ,
5p -7Ј- ( - - 2 °МГ)
где h - высота подвижной части.
c/Jo -/q/hc
g- ускорение свободного падения;
hr - расстояние от точки опоры до центра тяжести С подвижной части
Вычисление осевого зазора 50 в опоре осуществляют по формуле
/Т
50 + 2 Tk COS -у-1
до (---СИГ - 1 Гп
2 tg sin
где гк и гп - радиусы закругления керна и подпятника соответственно;
ОУ и «л - угол конуса керна и подпятника соответственно
Для типовой керновой опоры «п - 90° и OK 60° вычисление осевого зазора 50 упрощается:
60 0.5 (5Р+0.866 гк-0,414 гп
Способ позволяет снизить трудоемкость измерения зазора так как положение фотодатчика по отношению к стрепке изделия не влияет на величину длительности импульса, поэтому не требуется тарировка фогодатчика.
Формула изобретения 1 Способ бесконтактного определения зазора в верхней керновой опоре прибора,
заключающийся в том, что перемещают подвижную часть прибора под действием ее собственного веса из одного граничного положения в опорах в другое поворотом прибора вокруг горизонтальной оси, измеряют
параметры этого перемещения и по ним определяют зазор, отличающийся тем, что, с целью снижения трудоемкости и повышения точности, поворот прибора выполняют с постоянной скоростью, а в качестве
измеряемого параметра используют премя перемещения подвижной части
2 Способ поп 1,отличаю 1)4 ийся тгм что, с целью повышения точноеги за
VICM исключения погрешности измерения от 5 урапновешенности
LI-.WHJ
н
-
/5
( данных
апеюторпк
неуравновешенности поп-ч ы
части вокруг горизонтальной . , ч.1кч
ЛЯЮТ В ПЛОСКОСТИ ПрОХОЛЯ р. ULL
вращения подвижной ЧРГТИ - t- p«
Фиг 2
