Изобретение относится к приборостроению и может быть использовано при сборке и контроле щитовых электроизмерительных приборов с креплением подвижной части в керновых опорах.
Цель изобретения - расширение функдаональных возможностей за счет определения веса подвижной части.
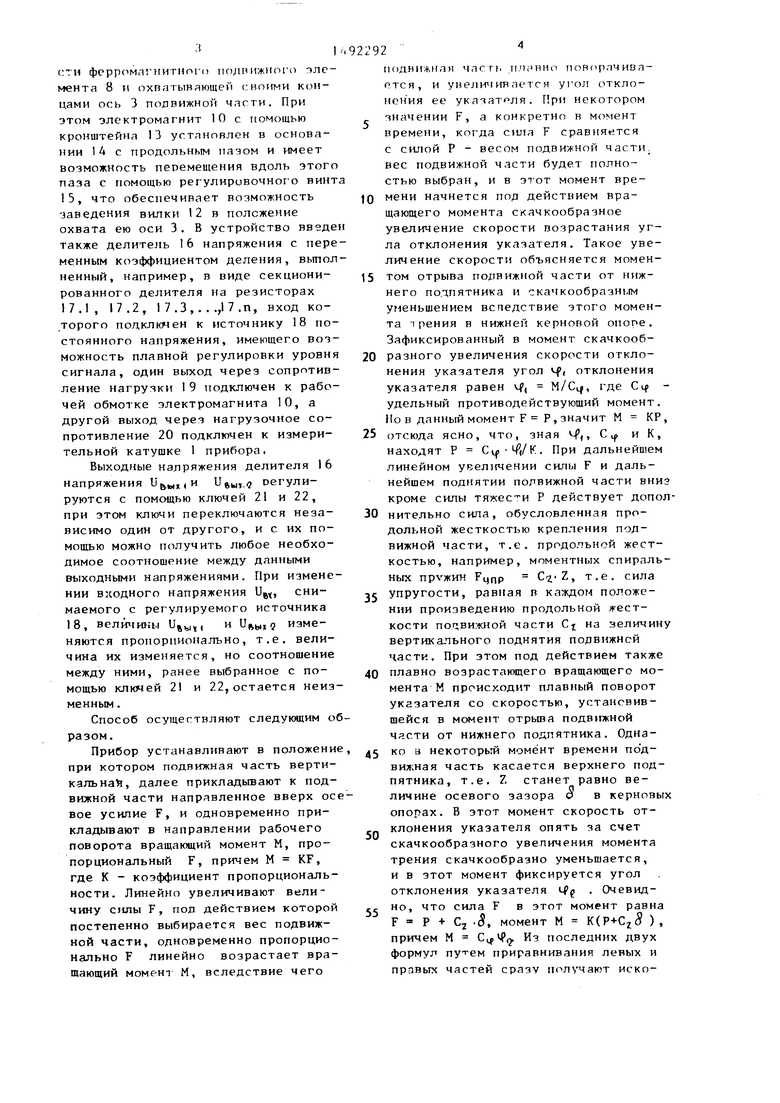
На фиг. 1 cxeMaTtf4Ho изображено устройство для осуществления предлагаемого способа, нл фиг. 2 - вид А на фиг. 1 .
Устройство для осуществления способа определения массогабаритных характеристик плскт ромагнитного прибора, включающего измерит ьную катушку 1, шкалу 2, поворотную ось 3 на кернах, установленную в подпятниках 4 и 5 с помощью моментики спиральных пружин 6 и 7, И закрепленный на оси 3 плоский ферромагнитный элемент 8, входящий в щель катушки 1 , и стрелочный указатель 9, расположенный над шкалой 2, содержит механизм осевого перемещения подвижной части, выполненный в виде электромагнита IО с рабочей обмоткой и жестко закрепленньм в осевом отверстии сердечником I1, имеющим выступающую часть в форме плоской вилки 12, размещенной параллельно плоско
;о ю
,К5
Ко
ст н фсрр(1магиитиог() подпижмш о элемента 8 и охватывающей своими концами ось 3 подвижной части. При этом электромагнит 10 с гшмощью кронштейна 13 установлен в основании 14 с продольным пазом и имеет возможность перемещения вдоль этого паза с помощью регулировочного винт 15, что обеспечивает возможность заведения вилки 12 в положение охвата ею оси 3. В устройство введе также делитель 16 напряжения с переменным коэффициентом деления, выполненный, например, в виде секционированного делителя на резисторах 17.1, 17.2, 17.3,...,17.п, вход ко- ,торого подклкнен к источнику 18 постоянного напряжения, имеющего возможность плавной регулировки уровня сигнала, один выход через сопротивление нагрузки 19 подключен к рабочей обмотке электромагнита 10, а другой выход через нагрузочное сопротивление 20 подключен к измерительной катушке 1 прибора.
Выходные налряжения делителя 16 напряжения ,,H . регулируются с помощью ключей 21 и 22, при этом ключи переключаются независимо один от другого, и с их помощью можно получить любое необходимое соотношение между данными выходными напряжениями. При изменении входного напряжения Uj, снимаемого с регулируемого источника 18, величины Ujm,, и , g изменяются пропорпионально, т.е. величина их изменяется, но соотношение между ними, ранее выбранное с помощью ключей 21 и 22, остается неизменным .
Способ осуществляют следующим образом.
Прибор устанавливают в положение при котором подвижная часть верти- кальнай, далее прикладьтают к подвижной части направленное вверх осевое усипие F, и одновременно прикладывают в направлении рабочего поворота вращающий момент М, пропорциональный F, причем М KF, где К - коэффициент пропорциональности. Линейно увеличивают величину F, под действием которой постепенно выбирается вес подвижной части, одновременно пропорционально F линейно возрастает вра- шающий момент М, вследствие чего
2292
гюднижнан 4rTcrfi ii.n;)BHo повсрлчивп- ется, и увеличивается угол откло- не)шя ее указат ля. При некотором
- значении F, а конкретно в момент времени, когда сила F сравняется с силой Р - весом подвижной части, вес подвижной части будет полностью выбран, и в этот момент вре10 мени начнется под действием вращающего момента скачкообразное увеличение скорости возрастания угла отклонения указателя. Такое увеличение скорости объясняется момен15 том отрыва подвижной части от нижнего подпятника и скачкообразным уменьшением вследствие этого момента ч рения в нижней керновой опопе. Зафиксированный в момент скачкооб20 разного увеличения скорости отклонения указателя угол vf, отклонения указателя равен M/Ci|, где Сч - удельный противодействующий момент. По в данный момент F Р , значит М КР ,
25 отсюда ясно, что, зная Ч о f и К, находят Р C( tf,/K. При дальнейшем линейном увеличении силы F и дальнейшем поднятии подвижной части вниэ кроме силы тяжес и Р действует допол30 нительно сила, обусловленная продольной жесткостью крепления подвижной части, т.е. продольной жесткостью, например, мпментных спиральных пружин Fцпp , т.е. сила
35 упругости, равная п ка;кдом положении произведению продольной жесткости подвижной части С на величину вертикального поднятия подвижней части. При этом под действием также
40 плавно возрастающего вращающего момента М происходит плавный поворот указателя со скоростью, установившейся в момент отрьша подвижной части от нижнего подпятника. Одна45 ко в некоторый момент времени по д- вижная часть касается верхнего подпятника, т.е. 7. станет равно величине осевого зазора о в керновых опорах. В этот момент скорость отклонения указателя опять за счет скачкообразного увеличения момента трения скачкообразно уменьшается, и в зтот момент фиксируется угол отклонения указателя t-fg . Очевидсс но, что сила F в этот момент равна
50
F Р + Cj -5, момент М K( ) , причем М Из последних двух формуя приравнивания левых и правых частей сразу пол -чают искоS
мук- тавигимш ь л.чя и пу.оА;(ени.ч огг(1 вого Чг ;зорл с н керчопых опорах
C( f5 - )/CCj, К) no днум зафиксированным углам ОГКЛОНРНИЯ стре лочног о указачеля tf и if н два характерных моме нта премени, сопро- нождакпчихся изменением характера движения указателя.
Предлагаемый способ универсален и может быть использован в своем прципе и не для электроизмерительно1 о прибора, т.е. для прибора, не содержащего вообще измерит-ельную катушку и т.п. В этом случае для прило- жения одновременно с осевым усилием к подвижной части вращающего момент используют не подачу в измерительную катушку электр ческого сигнала (что, конечно, наиболее просто, по- чему и реализация способа измерения для электроизмерительного прибора наиболее эффективна), а, например, прикладывают к нодвижной части силу не в вертикальном направлении, а под определенным углом к горизонтальной плоскости, причем на определенном плече относительно продольной оси подвижной части. В этом случае одновременно с осевым действием сипы, вызываемым одной (вертикальной) ее составляющей, действует вращающий момент, обусловленный горизонтальной составляющей силы и пропорциональный, естественно, осезой составляю- щей, причем коэффициент этой пропорциональной зависимости определяется углом наклона силы к горизонтальной плоскости.
,
Пример. В устройстве вместо выполнения соотношения между осегым усилием F и вращающим моментом М характеризуемым коэффициентом пропорциональности К, выполняется та- кое соотношение между напряжениями и 6Ь1 Q 1 и в,,ц ( на выходах секционированного делителя 16 напряжения. Регулировкой этого делителя с помощью ключей 21 и 22 добиваются вы- полнения необходимого соотношения 6ы /t Bb/r ( К. При этом выходное напряжение V подается в измерительную катушку 1 прибора, которая и создает действующий на под- вижную часть вращающий момент, равный М K/jUfty,, где KQ - коэффициент, зависящий от электромеханических параметров электроизмеритель926
Fioi o прибора, и янляюшийгя для каж- Д01-О типа прибор. Я и вес:т 1ой величиной. Подав ля ил вход прибора из- пестиое напряженно и измеряя угол отклонение указателя, величину данного коэффициента можно легко определить экспрриментадьно. Выходное нпряжение ир,„„, подается в рабочую об мотку электромагнита 10, создающего с помощью плоской вилки 12 прилагаемую к подвижной части продольную силу F, при этом F K(L pM, (, где K I- коэффициент, зависящий от электромеханических параметров обмотки электромагнита 10 и являющийся также известной величиной, определя eMcn i для определенных типов электрмагнита, конструкции вилки 12 и параметров плоского ферромагнитного элемента 8 контролируемого прибора экспериментально. Таким образом, с помощью ключей 21 и 22 осуществляют предварительную регулировку делителя 16, добиваясь заданного соотношения выходных напряжений, что то же что и М к F, определяемого коэффициентом пропорциональности К. При этом соотношение не должно быть очен малым, так как в этом случае показания Ц и М в самом начале шкалы прибора (сила F велика и выберет осевой зазор о при малых значениях момента М), не должно также быть очень большим, так как в этом случае при больших М и малых F может не хватить шкалы прибора, пока малой силой выберется весь зазор. На вход делителя 6 напряжение подается от источника 18 постоянного тока, поз- иоляющего осуществлять плавную регулировку выходного напряжения. Электромагнит 10, состоящий из рабочей обмотки, неподвил;но1-о сердечника М с закрепленной в нем плоской вилкой 12, перемещают с помощью регулировочного винта 15 в продольном пазу основания 14, благодаря чему устанавливают плоскость вилки 12 параллельно элементу 8 вблизи, него, причем вилка 12 охватьюает ось 3 подвижной части. При подаче электрического сигнала в рабочую обмотку электромагнита 10 элемент 8 взаимодействует с вилкой 12, в результате чег происходит перемещение оси 3 в осевом направлении без перекосов. Одновременно за счет подачи в измерительную катушку 1 прибора электрического
сигнала происходит поворот оси 3 в направлении рабочего угла поворота. Предлагаемый способ определения и устройство для его осуществления характеризуются высокой точностью, широкими функциональными возможностями, сравнительной простотой,отсутствием погрешности, вызванной деформацией керновых опор, отсутствием дополнительных измерительных приборов и устройств, вспомогательных соединительных средств.
вое положение гтс1лвижиой ч.чстн в мо- мен.ты скачкообразного увеличения и последующет о скачкостбртного уменьшения скорости изменения уг-лового положения 1ТОДВИЖНОЙ части, а вес и осевой зазор в керновых опорах находят из соотношений
p.Jk. ,
К
-(,2 -ч,).
к
м


| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ОСЕВОГО ЗАЗОРА В КЕРНОВЫХ ОПОРАХ ЭЛЕКТРОИЗМЕРИТЕЛЬНОГО ПРИБОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2171966C2 |
| РАЗГРУЖЕННАЯ КЕРНОВАЯ ОПОРА ЭЛЕКТРОИЗМЕРИТЕЛЬНОГО ПРИБОРА | 1996 |
|
RU2160902C2 |
| Способ регулировки величины осевого зазора в керновой опоре стрелочного указателя электроизмерительных приборов | 1980 |
|
SU957004A1 |
| Способ регулировки осевого зазора в керновой опоре измерительного механизма | 1985 |
|
SU1264082A1 |
| Способ регулировки осевого зазора в керновых опорах электроизмерительного прибора и устройство для его осуществления | 1989 |
|
SU1760366A1 |
| СПОСОБ УПРОЧНЕНИЯ ОПОРНОЙ ПОВЕРХНОСТИ КРАТЕРА ПОДПЯТНИКА | 1996 |
|
RU2117302C1 |
| Электромагнитный прибор | 1986 |
|
SU1383208A1 |
| Магнитоэлектрический измерительный механизм | 1985 |
|
SU1325365A1 |
| Устройство для измерения осевого зазора в опорах | 1980 |
|
SU934193A1 |
| Способ определения веса закрепленной в керновых опорах подвижной части электроизмерительного прибора | 1983 |
|
SU1109649A1 |
Изобретение относится к области приборостроения, может быть использовано при сборке и контроле щитовых электроизмерительных приборов с креплением подвижной части в керновых опорах. Цель изобретения - расширение функциональных возможностей способа за счет определения веса подвижной части. Способ включает установку прибора в положение с вертикальной ориентацией оси вращения подвижной части, воздействие на подвижную часть линейно возрастающего от нуля осевого усилия и одновременно линейно возрастающего от нуля вращающего момента, пропорционального осевому усилию, и фиксацию угловых положений φ1 и φ2 подвижной части в моменты скачкообразного увеличения и последующего скачкообразного уменьшения скорости изменения углового положения подвижной части, а вес и осевой зазор находят из соотношений (см. описание). Способ характеризуется отсуствием погрешности, вызванной деформацией керновых опор. 2 ил.
Формул
изобретения
Способ определения массогабарит- Аых характеристик электроизмерительного прибора, включающий установку прибора в положение с вертикальной ориентацией оси вращения подвижной части, воздействие на подвижную часть возрастающим осевым усилием фиксацию моментов касания подвижной части нижнего и верхнего упора, о т- личающийс я тем, что, с целью расщирения его функциональных возможностей за счет определения веса подвижной части, на подвижную часть воздействуют линейно возрастающим от нуля осевым усилием и одновременно воздейсвтуют на подвижную часть линейно возрастающим от нуля вращающим моментом и фиксируют угло« о
Anf Редактор.И. Горная
Фиг.г
Составитель В. Грачева Техред А.Кравчук Корректор И, Горная
5
0
5
0
где М - вращающий момент в каждый данный момент времени;
F - осевое усилие, в каждый данный момент времени;
Р - вес подвижной части;
К - коэффициент пропорциональности;
C - удельный противодействующий момент электроизмерительного прибора;
о - осевой зазор в керновых опорах;
С- - продольная жесткость подвижной части электроизмерительного прибора , о С угловые положения подвижной
части в момент соответственно скачкообразного увеличения и скачкообразного уменьп ения скорости изменения положения подвижной части.
Фиг.г
| Способ определения зазора виздЕлии | 1977 |
|
SU800597A1 |
