1
(21)4472068/07
(22)06.06.88
(46) 30.05.91. Бкхл. № 20
(71)Казанский филиал Московского энергетического института
(72)О.А.Бурунин
(53)62-83:621.313.333(088.8)
(56)Авторское свидетельство СССР f 1184063, кл. Н 02 Р 7/36, 1985.
Авторское свидетельство СССР f 1099367, кл. Н 02 Р 1/32, 1982.
(54)УСТРОЙСТВО ДЛЯ ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРО;ЦШГА- ТЕЛЕМ
(57)Изобретение относится к электротехнике и может быть использовано для управления нерегулируемым по частоте вращения асинхронным электродвигателем с короткозамкнутым ротором. Целью изобретения является повышение энергетических показателей.
В основу управления положена зависимость потребляемой электродвигателем активной мощности от отношения действующих значений тока статора к току намагничивания, которому пропорционально выходное напряжение блока 3 вычисления контролируемого параметра, в состав которого входят блок 18 деления и функциональный преобразователь 19, реализующий степенную функцию % где Ј3. Устройство содержит коммутаторы 1, 2 включения по схемам треугольник и звезда, датчики 4, 5 и 7 соответственно нагрузки, напряжения статора и питающей сети, пороговый элемент 6, блок 8 переключения, блоки 10 и 12 задания и импульсно-фазового управления, регулятор 11, три ключа 13-15 и формирователь 16 импульсов. Коэффициент мощности увеличивается за счет сочетания фазоимпульсного и релейного регулирования. 1 ил.
3
(Л
О
ел
00
Изобретение относится к электротехнике и может быть использовано для управления нерегулируемым по частоте вращения асинхронным электродвигателем с короткозамкнутым ротором.
Цель изобретения - повышение энергетических показателей.
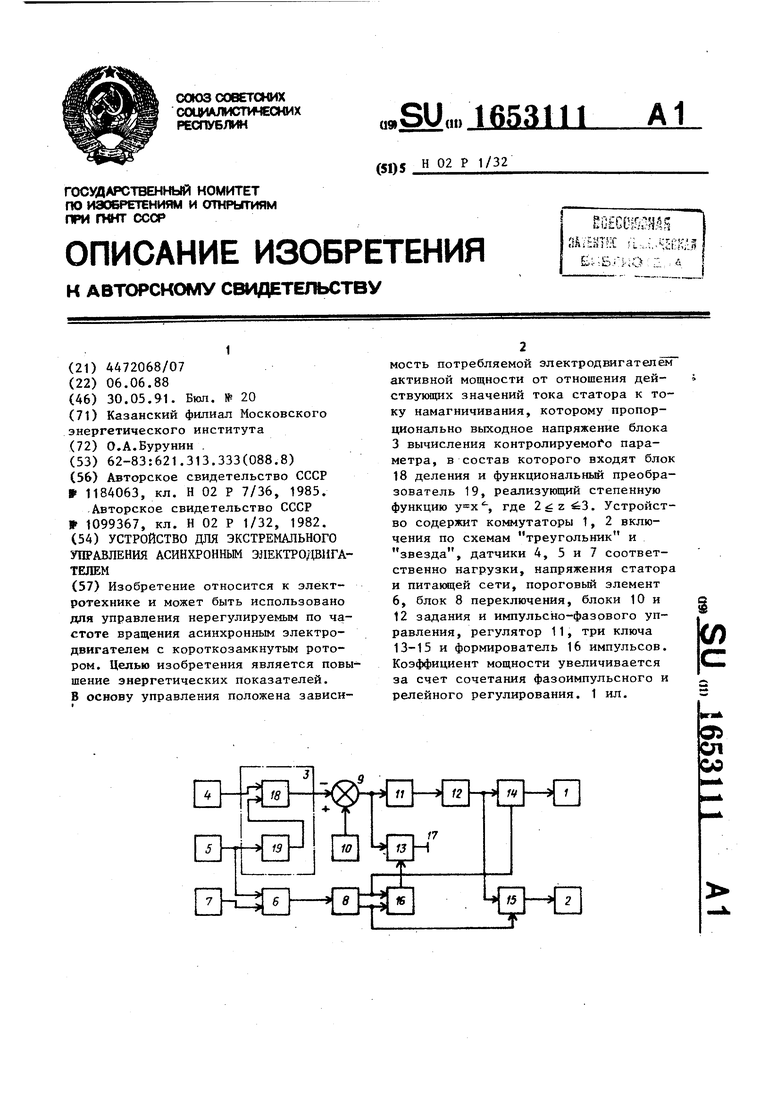
На чертеже приведена структурная схема устройства для экстремального управления асинхронным электродвигателем.
Устройство содержит тиристорный коммутатор 1 включения статорной обмотки электродвигателя по схеме треугольник, тиристорный коммутатор 2 включения статорной обмотки электродвигателя по схеме звезда, блок 3 вычисления контролируемого параметра, датчик 4 нагрузки электродвигателя, датчик 5 напряжения статорной обмотки электродвигателя, пороговый элемент 6, датчик 7 напряжения питающей сети, блок 8 переключения, узел 9 сравнения, блок 10 задания контролируемого параметра, регулятор 11 к контроля параметра, блок 12 импульс- но-фазового управления, три управляемых ключа 13-15 и формирователь 16 импульсов. Выход датчика 4 нагрузки электродвигателя соединен с одним входом блока 3 вычисления контролируемого параметра, другой вход которого соединен с выходом датчика 5 напряжения статорной обмотки электродвигателя и одним входом порогового элемента 6, другой вход которого соединен с выходом датчика 7 напряжения питающей сети. Выход порогового элемента 6 соединен с входом блока 8 переключения. Выход блока 3 вычисления контролируемого параметра соединен с вычитающим входом узла 9 сравнения, суммирующий вход которого соединен с выходом блока 10 задания контролируемого параметра. Выход узла 9 сравнения соединен с входом регулятора 11 контролируемого параметра и информационным входом первого ключа 13. Выход регулятора контролируемого параметра через блок 12 импульсно-фазово- го управления соединен с информационными входами второго и третьего управляемых ключей 14, 15. Один выход бпока 8 переключения соединен с одним входом формирователя 16 импульсов и с управляющим входом второго ключа 14, выход которого соединен с тирис0
5
0
5
0
5
0
5
0
5
торным коммутатором 1 включения статорной обмотки электродвигателя по схеме треугольник. Другой выход блока 8 переключения соединен с другим входом формирователя 16 импульсов и с управляющим входом третьего ключа 15,выход которого соединен с тирис- торным коммутатором 2 включения статорной обмотки электродвигателя по схеме звезда. Выход формирователя 16 импульсов соединен с управляющим входом первого ключа 13, выход которого подключен к общей шине 17 устройства. I
В основу экстремального управления положена зависимость потребляемой электродвигателем активной мощности от отношения действующих значений тока статора к току намагничивания. Для обеспечения работы электродвигателя в точках минимума потребляемой активной мощности устройство управления обеспечивает поддержание заданной величины отношения действующих значений тока статора к току намагничивания. В этом случае выходное напряжение блока вычисления контролируемого параметра должно быть пропорционально отношению действующих значений тока статора к току намагничивания. Поэтому блок 3 вычисления контролируемого параметра содержит блок 18 деления и функциональный преобразователь 19, при этом вход Делимое блока 18 деления образует один вход блока вычисления и соединен с выходом датчика 4 нагрузки, а вход Делитель блока 18 соединен с выходом функционального преобразователя 19, вход которого образует второй вход блока 3 вычисления и подключен к выходу датчика напряжения статорной обмотки электродвигателя. Выход блока 18 деления образует выход блока 3 вычисления и соединен с вычитающим входом узла 9 сравнения. Функциональный преобразователь 19 реализует степенную функцию , где 2 z 3, отражающую зависимость тока намагничивания от напряжения на статорной обмотке электродвигателя. Поэтому выходной сигнал функционального преобразователя пропорционален току намагничивания и не зависит от скольжения электродвигателя. Датчик 4 нагрузки контролирует токовую нагрузку электродвига51
теля и его выходной сигнап пропорционален току статорной обмотки.
Устройство работает следующим образом.
С датчика 5 напряжения на один вход порогового элемента 6 подается напряжение Uaj, пропорциональное напряжению на статорной обмотке электродвигателя U«B, а с датчика 7 на другой вход порогового элемента 6 подается напряжение Uc, пропорциональное фазному напряжению питающей сети Uc. Верхний порог срабатывания порогового элемента 6 равен U LU, где ,95-1,0, а его нижний порог срабатывания - UftyKfl f Uc , где |3 0,6- 0,9. Поэтому, если напряжение на статорной обмотке , то на выходе порогового элемента 6 устанавли
вается сигнал Г
вызывающий включение статорной обмотки электродвигателя по схеме треугольник. Если же напряжение на статорной обмотке UgB Ј , то на выходе порогового элемента устанавливается сигнал О, вызывающий включение статорной обмотки электродвигателя по схеме звезда. Команды на отключение одного коммутатора и включение другого формируются блоком 8 переключения.
Переключение статорной обмотки электродвигателя с одной схемы соединения на другую фактически вызывает дискретное регулирование выходного напряжения питания системы коммутатор - электродвигатель (линейное или фазное напряжение). Плавное, фазоимпульсное регулирование выходного напряжения (напряжение, прикладываемого к статорной обмотке электродвигателя) коммутаторов 1 и 2 осуществляется с помощью блока 12 фазо- импульсного управления.
Пусть двигатель работает с небольшой нагрузкой (порядка 20-30% номинальной) , напряжение на выходе порогового элемента 6 соответствует сигналу О, который поступает на вход блока 8 переключения. На одном (верхнем по схеме) выходе блока 8 переключения сигнал управления соответствует О, а на другом (нижнем по схеме) выходе - 1, который поступает на управляющий вход третьего ключа 15. В результате импульсы управления с выхода блока фазоимпульсного управления поступают на управляющий вход коммутатора 2 включения статорной об1
0
5
5
0
5
0
S
0
5
116
мотки электродвигателя по схеме звезда.
-.При увеличении нагрузки возрастает ток статора электродвигателя за счет увеличения его скольжения, т.е. увеличивается сигнал с датчика 4 тока, что также приводит к увеличению сигнала на выходе блока 18 деления. На выходе узла 9 сравнения появляется сигнал ошибки, которьш подается на вход регулятора 11 контролируемого параметра (например, ПИ-регулятора отношения тока статора к току намагничивания) , выходное напряжение которого поступает на вход блока 12 фазоимпульсного управления. В результате увеличивается напряжение на статоре электродвигателя. Если напряжение на статоре электродвигателя становится равным Ug05tLUc, то на входе порогового элемента 6 появляется сигнал 1, который поступает на вход блока 8 переключения.На нижнем (по схеме) выходе блока 8 переключения устанавливается сигнал О, что приводит к закрытию третьего ключа 15, запиранию тиристоров коммутатора 2 включения статорной обмотки электродвигателя по схеме звезда. На верхнем (по схеме) выходе блока 8 переключения устанавливается сигнал 1, что приводит к открыванию второго ключа 14, отпиранию тиристоров коммутатора 1 включения статорной обмотки электродвигателя по схеме треугольник импульсами с выхода блока 12 импульсно- фазового управления. Одновременно сигнап 1 поступает на вход формирователя 16 импульсов, который формирует импульс задержки с уровнем 1. Этот импульс поступает на управляющий вход первого ключа 13, обнуляя сигнал управления на входе регулятора 11 контролируемого параметра. Выдержка времени необходима для отстройки системы управления от кратковременных бросков тока при переключении статорной обмотки электродвигателя с одной схемы соединения на другую. Длительность импульса задержки выбирается равной длительности протекания переходных процессов при переключениях статорной обмотки. По окончании действия импульса задержки сигнал датчика 4 тока вновь будет соответствовать нагрузке электродвигателя. Ключ 13 закрывается, а сигнал реальной ошибки передается на вход регулятора 11 контролируемого параметра. Напряжение на статоре электродвигателя увеличивается до тех пор, пока отношение токов статорной обмотки и намагничивания не достигнет прежнего своего значения.
При сбросе нагрузки скольжение электродвигателя уменьшается, уменьшается ток статора, что приводит к уменьшению напряжения на электродвигателе до тех пор, пока величина отношения токов не достигнет своего прежнего значения.
Если в процессе отработки сигнала рассогласования отношения токов напряжение на статоре электродвигателя становится равным UapЈf3Uc, то на выходе порогового элемента 6 появляется сигнал О, который поступает на вход блока 8 переключения. На верхнем (по схеме) выходе блока 8 переключения устанавливается сигнал О, что приводит к закрыванию ключа 14, запиранию тиристоров коммута- тора 1. На нижнем (по схеме) выходе блока 8 переключения устанавливается сигнал 1, что приводит к открыванию ключа 15, отпиранию тиристоров коммутатора 2. Одновременно сигнал 1 поступает на вход формирователя 16 импульсов, который формирует импульс задержки с уровнем 1, поступающий на управляющий вход ключа 13. Ключ 13 открывается, обнуляя сигнал управления на входе регулятора 11 контролируемого параметра. По окончании импульса задержки ключ 13 закрывается, разрешая отработку сигнала рассогласования. Напряжение на статоре электродвигателя уменьшается до тех пор, пока отношение токов статорной обмотки и токпн намагничивания не достигнет прежнего своего значения.
Таким образом, предложенное устройство позволяет сочетать фазоимпульсно регулирование напряжения на статорной обмотке электродвигателя с дискретным (релейным) регулированием, в результате повышаются коэффициенты сдвига и искажения, увеличиваются энергетические показатели электропривода, снижаются потери электроэнергии в питающей сети Формула изобретения
Устройство для экстремального управления асинхронным электродвигателем, содержащее тиристорный коммутатор включения статорной обмотки элек
5 0 5 0 Q 5
0
5
тродвигателя по схеме звезда и тиристорный коммутатор включения статорной обмотки электродвигателя по схеме треугольник, блок переключения, узел сравнения, датчик нагрузки электродвигателя и датчик напряжения питающей сети, пороговый элемент, выход которого соединен с входом блока переключения, отличающееся тем, что, с целью повышения энергетических показателей, введены блок вычисления контролируемого параметра, блок задания контролируемого параметра, регулятор контролируемого параметра, блок импульсно- фазового управления, датчик напряжения статорной обмотки электродвигателя, формирователь импульсов и три ключа, причем выход датчика нагрузки электродвигателя соединен с одним входом блока вычисления контролируемого параметра, другой вход которого соединен с датчиком напряжения статорной обмотки электродвигателя и одним входом порогового элемента, другой вход порогового элемента соединен с выходом датчика напряжения питающей сети, выход блока вычисления контролируемого параметра соединен с вычитающим входом узла сравнения, суммирующий вход которого соединен с выходом блока задания контролируемого параметра, выход узла сравнения соединен с входом регулятора контролируемого параметра и информационным входом первого ключа, вход блока им- пульсно-фязового управления соединен с выходом регулятора контролируемого параметра, а выход блока импуль- сно-фазового управления - с информационными входами второго и третьего ключей, один выход блока переключения соединен с одним входом формирователя импульсов и управляющим входом второго ключа, выход которого соединен с тиристорным коммутатором включения статорной обмотки электродвигателя по схеме треугольник, другой выход блока переключения соединен с другим входом формирователя импульсов и управляющим входом третьего ключа, выход которого соединен с тиристорным коммутатором включения статорной обмотки электродвигателя по схеме звезда, выход формирователя импульсов соединен с управляющим входом первого клю ча, выход которого подключен к общей шине устройства
