Изобретение относится к сельскохозяйственному машиностроению, в частности к машинам для уборки капусты.
Цель изобретения - повышение эффективности выполнения технологического процесса.
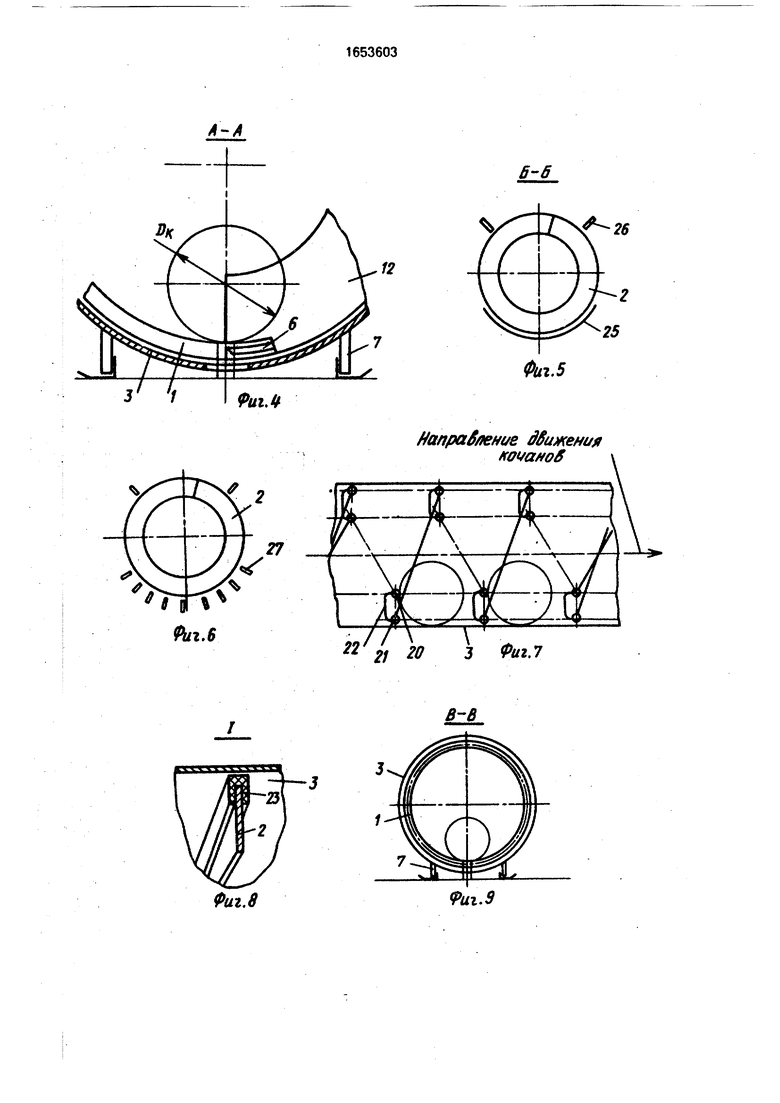
На фиг. 1 схематически изображен уборочный модуль капустоуборочной машины, общий вид; на фиг. 2 - то же, вариант с датчиками перемещения (конечными переключателями), взаимодействующими с витком увеличенного диаметра подбирающей части спирали; на фиг. 3 - то же, вариант с транспортирующей частью спирали прямоугольного сечения и датчиками перемещения (конечными переключателями), взаимодействующими с транспортирующей частью спирали; на фиг. 4 - разрез А-А на фиг. 3(узел соединения подбирающей части спирали с транспортирующей частью спирали прямоугольного типа); на фиг. 5 - разрез Б-Б на фиг. 3 с вариантом направляющей, выполненной в виде желоба и фиксирующих планок (поперечный разрез в зоне транспортирующей части спирали); на фиг. 6 - то же, с вариантом направляющей, выполненной в виде продольных планок; на фиг. 7 - вариант транспортирующей части спирали прямоугольного типа, выполненной из двух спиралей; на фиг. 8 - узел I на фиг. 3 (узел изоляции спирали относительно направляющей); на фиг. 9 - разрез В-В на фиг. 1, (поперечный разрез в зоне подбирающей части спирали с направляющей, выполненной в виде тру- фиг. 10 - капустоуборочная машина на базе самоходного шасси портального типа, общий вид; на фиг. 11 - принципиальная схема работы капустоуборочной машины с датчиками перемещений; на фиг. 12 - принципиальная схема блока управления с подключением спирали и направляющей.
Уборочный модуль капустоуборочной машины (фиг. 1) содержит срезающий аппарат, имеющий установленные вдоль ее продольной оси устройства для подъема, выравнивания и среза кочанов, а также их транспортировки, выполненные в виде спирали, состоящей из подъемно-выравнивающей части 1 и транспортирующей части 2 и установленной в направляющей 3 в виде трубы, и соединенной зубчатой передачей 4 с приводом 5. На границе зон выравнивания и транспортирования спирали установлен нож 6 устройства срезки кочанов, а направляющая 3 снабжена ползунами 7, служащими для сохранения постоянной высоты размещения подъемно-выравнивающей части 1 спирали независимо от рельефа местности. Часть 1 спирали имеет шаг ti, не
более меньшего шага посадки кочанов (шаг посадки кочанов обеспечивается посадочной машиной), а транспортирующая часть спирали 2 имеет шаг tr, не менее шага ti
подбирающей части спирали 1 и не менее диаметра dc шарового сегмента, образованного сферой кочана максимального диаметра О и имеющего высоту he, равную минимальному расстоянию от поверхности внутрен0 него диаметра спирали 2 до нижней точки внутренней поверхности направляющей трубы 3.
Для повышения надежности перемещения кочанов увеличивают размер hc, для че5 го транспортирующая часть спирали 2 снабжена гребнями 8 (фиг. 2), закрепленными с некоторым шагом по длине спирали.
Последний виток подъемно-выравнивающей части спирали в месте установки ножа
0 6 имеет шаг т,2, не менее наибольшего шага посадки кочанов, а транспортирующая часть 2 спирали может иметь витки прямоугольного сечения с большим размером, не менее половины диаметра наибольшего ко5 чана.
В модуле, изображенном на фиг. 2, часть 1 спирали имеет виток 9 увеличенного диаметра, взаимодействующий с датчиками перемещения в виде конечных переключа0 телей 10 и 11 при помощи подпружиненных упоров 12 и 13 соответственно. Спираль имеет хвостовик, соединенный с приводом 5 при помощи муфты 14. Конечные переключатели 10 и 11 подключены к блоку 15 управ5 ления, управляющему работой привода 5.
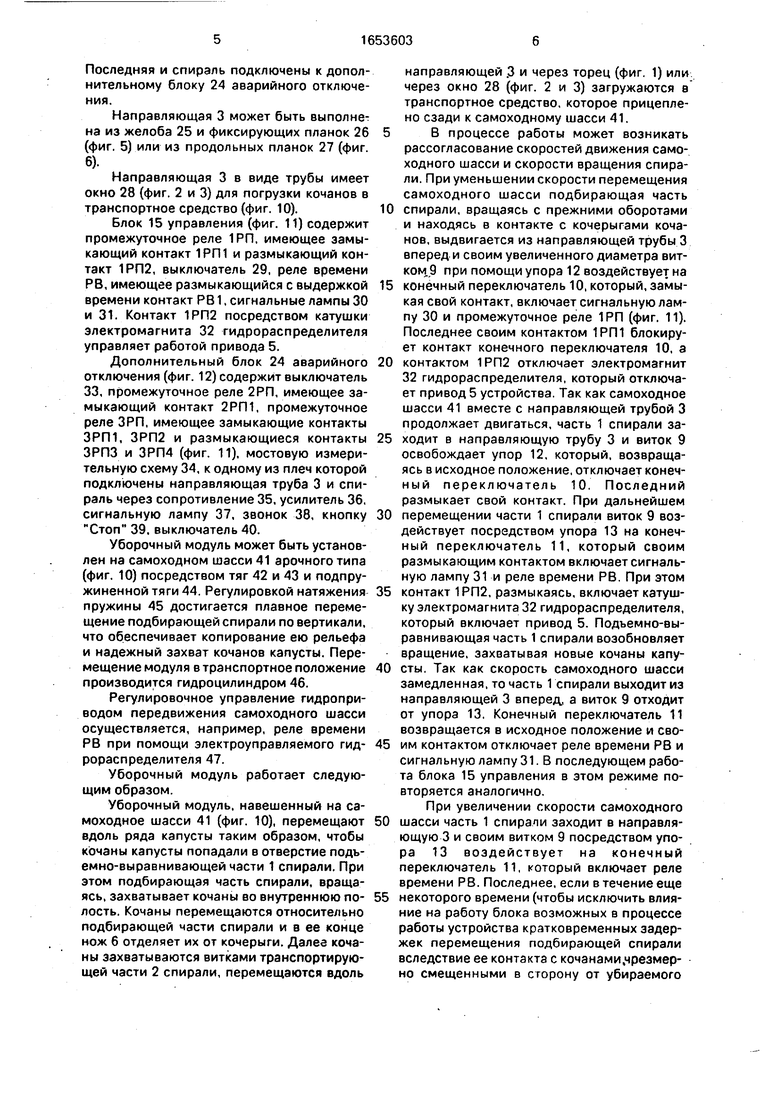
В устройстве, показанном на фиг. 3, транспортирующая часть 2 спирали выполнена прямоугольного сечения и смещена в сторону части 1 спирали на половину осево0 го шага (tr/2). Она снабжена соосным валом 16. на котором установлены с возможностью продольного перемещения шестерня 17 и упор 18, взаимодействующий с конечными переключателями 10 и 11, подключен5 ными к блоку 15 управления. Привод 5 соединен с шестерней 17 при помощи зубчатого колеса 19.
Прямоугольная спираль 2 может быть выполнена (фиг. 7) из двух спиралей 20 и 21,
0 соосно соединенных одна с другой посредством перемычек 22, причем навивки спиралей 20 и 21 должны быть одинакового направления. Высота витка о прямоугольной спирали должна быть не менее полови5 ны размера максимального диаметра кочана, а шаг - не менее размера максимального размера кочана. Витки спиралей снабжены изоляционными фигурными полосами 23, служащими для изоляции спирали относительно направляющей 3.
Последняя и спираль подключены к дополнительному блоку 24 аварийного отключения.
Направляющая 3 может быть выполнена из желоба 25 и фиксирующих планок 26 (фиг. 5) или из продольных планок 27 (фиг. 6).
Направляющая 3 в виде трубы имеет окно 28 (фиг. 2 и 3) для погрузки кочанов в транспортное средство (фиг. 10).
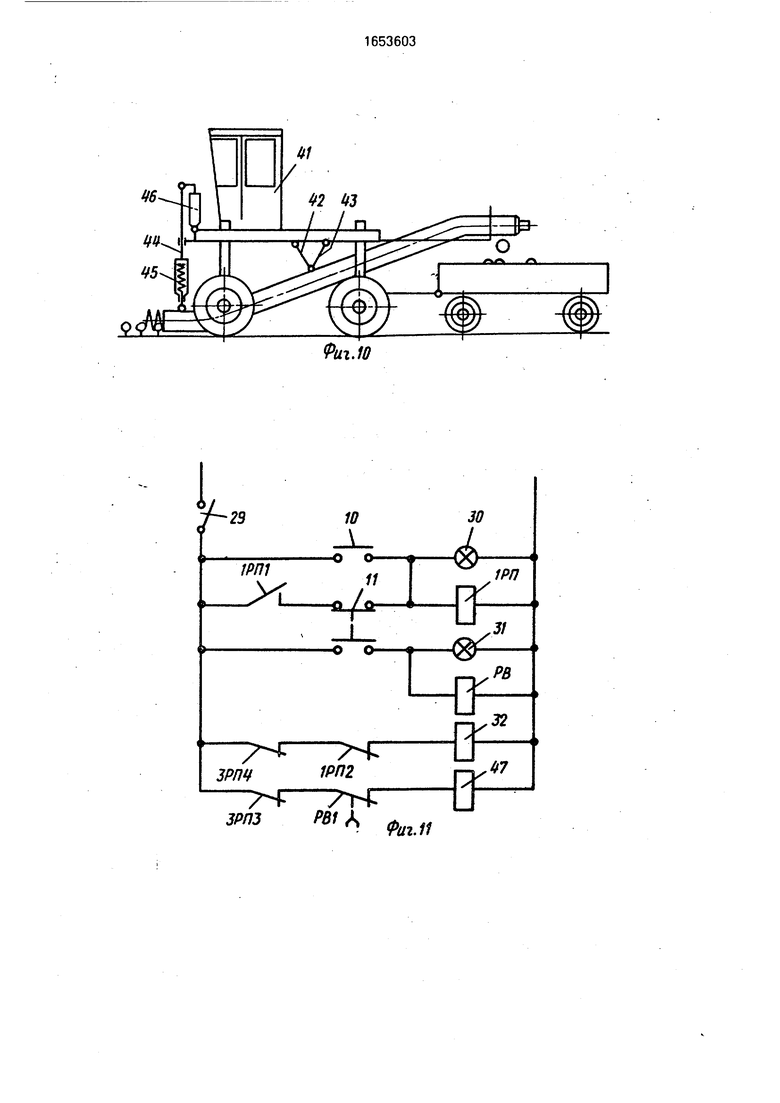
Блок 15 управления (фиг. 11) содержит промежуточное реле 1РП, имеющее замыкающий контакт 1РП1 и размыкающий контакт 1РП2, выключатель 29, реле времени РВ, имеющее размыкающийся с выдержкой времени контакт РВ 1, сигнальные лампы 30 и 31. Контакт 1РП2 посредством катушки электромагнита 32 гидрораспределителя управляет работой привода 5.
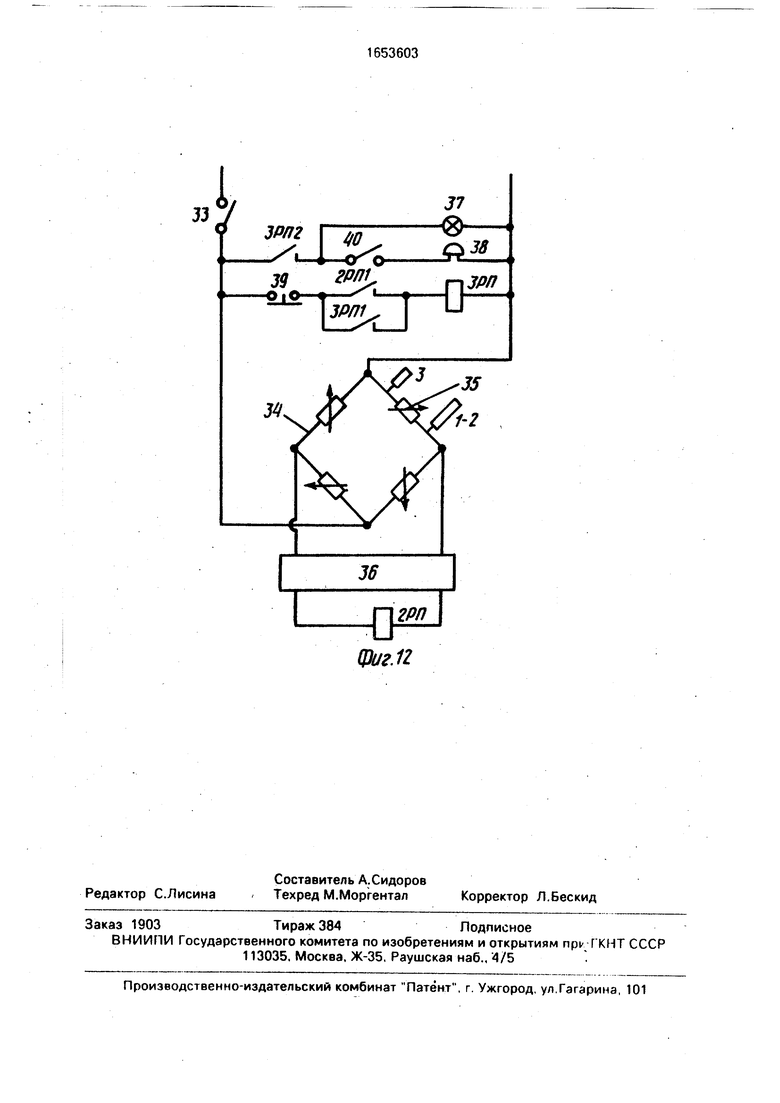
Дополнительный блок 24 аварийного отключения (фиг. 12) содержит выключатель 33, промежуточное реле 2РП, имеющее замыкающий контакт 2РП1, промежуточное реле ЗРП, имеющее замыкающие контакты ЗРП1, ЗРП2 и размыкающиеся контакты ЗРПЗ и ЗРП4 (фиг. 11), мостовую измерительную схему 34, к одному из плеч которой подключены направляющая труба 3 и спираль через сопротивление 35, усилитель 36, сигнальную лампу 37, звонок 38. кнопку Стоп 39, выключатель 40.
Уборочный модуль может быть установлен на самоходном шасси 41 арочного типа (фиг. 10) посредством тяг 42 и 43 и подпружиненной тяги 44. Регулировкой натяжения пружины 45 достигается плавное перемещение подбирающей спирали по вертикали, что обеспечивает копирование ею рельефа и надежный захват кочанов капусты. Перемещение модуля в транспортное положение производится гидроцилиндром 46.
Регулировочное управление гидроприводом передвижения самоходного шасси осуществляется, например, реле времени РВ при помощи электроуправляемого гидрораспределителя 47.
Уборочный модуль работает следующим образом.
Уборочный модуль, навешенный на самоходное шасси 41 (фиг. 10), перемещают вдоль ряда капусты таким образом, чтобы кочаны капусты попадали в отверстие подъемно-выравнивающей части 1 спирали. При этом подбирающая часть спирали, вращаясь, захватывает кочаны во внутреннюю полость. Кочаны перемещаются относительно подбирающей части спирали и в ее конце нож 6 отделяет их от кочерыги. Далеа кочаны захватываются витками транспортирующей части 2 спирали, перемещаются вдоль
направляющей .3 и через торец (фиг. 1) или через окно 28 (фиг. 2 и 3) загружаются в транспортное средство, которое прицеплено сзади к самоходному шасси 41. 5В процессе работы может возникать
рассогласование скоростей движения самоходного шасси и скорости вращения спирали. При уменьшении скорости перемещения самоходного шасси подбирающая часть
0 спирали, вращаясь с прежними оборотами и находясь в контакте с кочерыгами кочанов, выдвигается из направляющей трубы 3 вперед и своим увеличенного диаметра витком. 9 при помощи упора 12 воздействует на
5 конечный переключатель 10, который, замыкая свой контакт, включает сигнальную лампу 30 и промежуточное реле 1РП (фиг. 11). Последнее своим контактом 1РП1 блокирует контакт конечного переключателя 10, а
0 контактом 1РП2 отключает электромагнит 32 гидрораспределителя, который отключает привод 5 устройства. Так как самоходное шасси 41 вместе с направляющей трубой 3 продолжает двигаться, часть 1 спирали за5 ходит в направляющую трубу 3 и виток 9 освобождает упор 12, который, возвращаясь в исходное положение, отключает конеч- ный переключатель 10. Последний размыкает свой контакт. При дальнейшем
0 перемещении части 1 спирали виток 9 воздействует посредством упора 13 на конечный переключатель 11, который своим размыкающим контактом включает сигнальную лампу 31 и реле времени РВ. При этом
5 контакт 1РП2, размыкаясь, включает катушку электромагнита 32 гидрораспределителя, который включает привод 5. Подьемно-вы- равнивающая часть 1 спирали возобновляет вращение, захватывая новые кочаны капу0 сты. Так как скорость самоходного шасси замедленная, то часть 1 спирали выходит из направляющей 3 вперед, а виток 9 отходит от упора 13. Конечный переключатель 11 возвращается в исходное положение и сво5 им контактом отключает реле времени РВ и сигнальную лампу 31. В последующем работа блока 15 управления в этом режиме повторяется аналогично.
При увеличении скорости самоходного
0 шасси часть 1 спирапи заходит в направляющую 3 и своим витком 9 посредством упора 13 воздействует на конечный переключатель 11. который включает реле времени РВ. Последнее, если в течение еще
5 некоторого времени (чтобы исключить влияние на работу блока возможных в процессе работы устройства кратковременных задержек перемещения подбирающей спирали вследствие ее контакта с кочанами.чрезмер- но смещенными в сторону от убираемого
ряда или с другими посторонними предметами) остается включенным, своим контактом РВ 1 при помощи гидрораспределителя 47 отключает привод самоходного шасси. Для выхода на нормальный режим работы водитель должен снизить скорость самоходного шасси или увеличить обороты спирали.
Блок 15 управления также исключает поломки уборочного модуля во время работы при встречах подбирающей спирали с различными непредвиденными препятствиями. В таких случаях он работает аналогично указанному.
В варианте устройства, показанном на фиг. 3, вместе с подъемно-выравнивающей частью 1 спирали перемещается и транспортирующая часть 2 спирали с валом 16. На конечные переключатели 10 и 11 воздействует упор 18. В остальном работа устройства аналогична указанному.
В процессе уборки капусты в зоне работы части 1 спирали может оказаться металлический предмет (проволока, трак и т.п). При его захвате подбирающей частью спирали этот предмет до подхода к ножу замыкает собой подбирающую часть спирали и направляющую трубу 3. вследствие чего происходит рассогласование мостовой схемы 34 (фиг. 12). В усилитель 36 подается сигнал, срабатывает реле 2РП, которое своим контактом 2РП1 включает промежуточное реле ЗРП. Последнее своим замыкающим контактом ЗРП1 блокирует контакт 2РП1, замыкающим контактом ЗРП2 включает сигнальную лампу 37 и звонок 38, а размыкающими контактами ЗРПЗ и ЗРП4 (фиг. 11) отключает привод 5 модуля и привод перемещения самоходного шасси. Таким образом, исключается возможность поломки модуля.
Формула изобретения 1. Уборочный модуль капустоуборочной машины, содержащий установленные вдоль продольной оси машины устройства для подъема, выравнивания, срезки кочанов, их транспортировки и привод, отличающийся тем. что, с целью повышения эффективности выполнения технологического процесса, устройства для подъема, выравнивания и транспортировки выполнены в виде установленной в направляющей с возможностью вращения спирали, при этом на границе зон выравнивания и транспортирования спирали установлены ножи.
2.Модуль по п. 1,отличающийся тем. что нож направлен в сторону транспортирующей части спирали.
3.Модуль по пп. 1 и 2, о т л и ч а ю щ и- й с я тем, что транспортирующаяся часть спирали выполнена из витков прямоугольного сечения с шагом, превышающим шаг витка подбирающей части спирали, при этом транспортирующая часть спирали смещена на половину шага в сторону подбирающей части спирали, а ее передний торец и
нож размещены в одной горизонтальной плоскости.
4.Модуль по п. 3, отличающийся тем, что транспортирующая часть спирали выполнена в виде двух концентрично расположенных спиралей равного шага, соединенных одна с другой, причем спирали имеют навивку одинакового направления.
5.Модуль по п. 1,отличающийся тем, что привод снабжен блоком регулирования его скорости вращения, связанным с имеющимися датчиками перемещения, при этом один из витков подбирающей части спирали выполнен большего диаметра для взаимодействия с датчиками перемещения.
6. Модуль по п. 5, отличающийся гем. что спираль выполнена с возможностью продольного перемещения, а свободный конец ее транспортирующей части размещен с возможностью взаимодействия
с датчиками перемещения.
7.Модуль поп. 1,отличающийся тем, что спираль и направляющая установлены с зазором относительно одна другой, соединены между собой посредством электрического сопротивления, связанного с имеющимся дополнительным блоком аварийного отключения привода.
8.Модуль по пп. 1 и 2, о т л и ч а ю щ и- м с я тем, что нож элемента среза кочанов
закреплен на направляющей.
9.Модуль по п. 1,отличающийся тем, что направляющая выполнена в виде желоба и продольных фиксирующих планок.
10.Модуль поп. 1,отличающийся тем, что направляющая выполнена в виде
продольных планок.
10 /3,
9 7
Риг. 2
11
28
8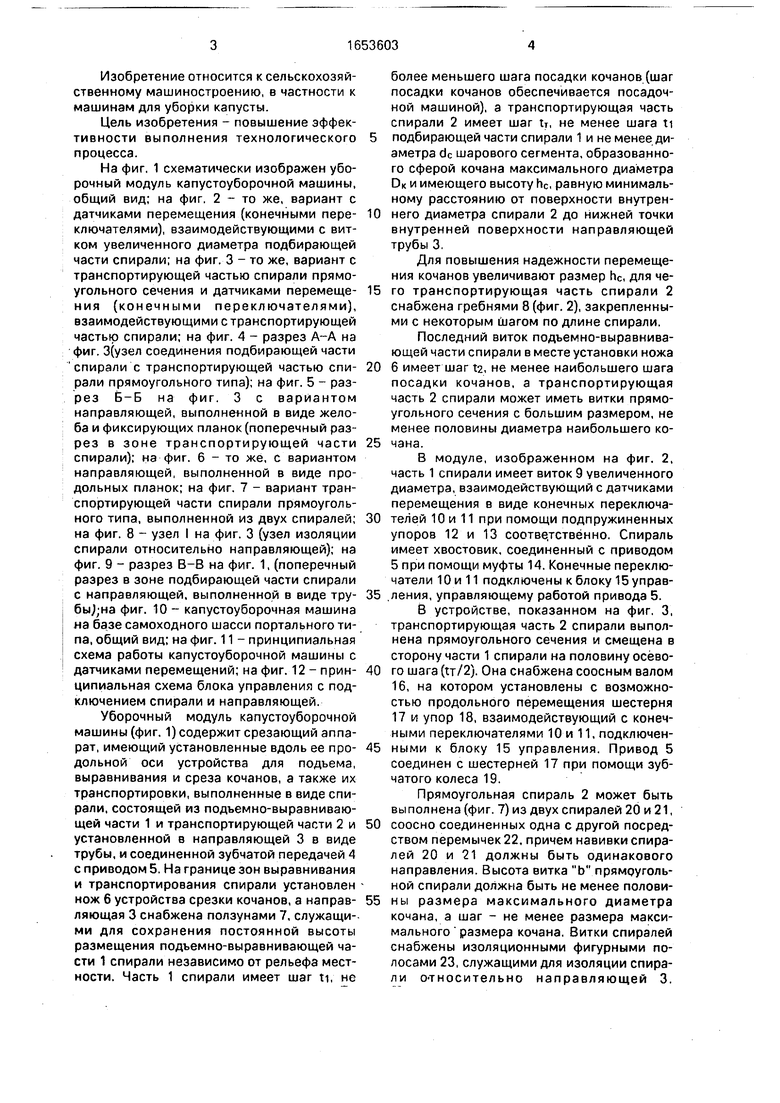
| название | год | авторы | номер документа |
|---|---|---|---|
| Капустоуборочная машина | 1977 |
|
SU990120A1 |
| СПОСОБ УБОРКИ КОЧАННОЙ КАПУСТЫ И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2253215C2 |
| Погрузочный транспортер | 1985 |
|
SU1296036A1 |
| Способ уборки кочанной капусты и устройство для его осуществления | 2022 |
|
RU2791685C1 |
| Капустоуборочный комбайн | 1979 |
|
SU1037868A1 |
| СПОСОБ УБОРКИ КОЧАННОЙ КАПУСТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2554403C1 |
| РАБОЧИЙ ОРГАН КАПУСТОУБОРОЧНОЙ МАШИНЫ | 1969 |
|
SU242550A1 |
| Капустоуборочный комбайн | 2019 |
|
RU2711964C1 |
| Способ уборки кочанной капусты и устройство для его осуществления | 2019 |
|
RU2711230C1 |
| СПОСОБ УБОРКИ И ПОДГОТОВКИ КАПУСТЫ К ХРАНЕНИЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2244398C2 |
изобретение относится к области сельскохозяйственного машиностроения, в частности к машинам для уборки капусты. Целью изобретения является повышение эффективности выполнения технологического процесса. Устройства для подъема, выравнивания и транспортировки выполнены в виде установленной в направляющей 3 с возможностью вращения спирали, состоящей из подьемно-выравнивающей части 1 и транспортирующей части 2. На границе зон выравнивания и транспортировки спирали установлены ножи 6 устройства срезки кочанов, направленные в сторону транспортирующей части 2 спирали. Спираль соединена зубчатой передачей 4 с приводом 5. Направляющая 3 снабжена ползунами 7. При работе модуля исключается возможность поломок спирали и повреждения кочанов капусты из-за рассогласования скорости вращения спирали и скорости перемещения машины вдоль ряда убираемой капусты. В аварийных ситуациях: при чрезмерном растяжении спирали (ее обороты превышают требуемое значение) выдается соответствующий сигнал и отключается привод спирали. При чрезмерном сжатии спиралей (обороты спиралей меньше требуемого значения) выдается сигнал и дается команда либо на увеличение числа оборотов спиралей, либо на отключение привода перемещения машины вдоль убираемого ряда капусты. 9 з.п.ф-лы. 12 ил. 5 (Л С ON СЛ CJ о о ы Фиг.1
Риг.З
р
9игА
Фиг.8
Направление дбижения
KOVOffoS
22 21 20 3 Фиг.7
В-В
Фиг.9
46
Риг.10
V
29
10
7-f 7Н
ЗРПЗ PBI А
30
Риг. 11
фиг.12
| КАПУСТОУБОРОЧНАЯ МАШИНА | 0 |
|
SU238934A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление к индикатору для определения момента вспышки в двигателях | 1925 |
|
SU1969A1 |
| Срезающий аппарат капустоуборочной машины | 1978 |
|
SU1037867A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
