Изобретение относится к автоматике и может быть использовано в системах управления внутрицеховыми безрельсовыми транспортными средствами в гибких автоматизированных производствах.
Известны многочисленные устройства управления движением транспортных средств, использующих различные опорные трассы и различные методы осуществления маневров в узловых пунктах разветвления трассы. Например, известно устройство для автоматического управления транспортным средством, которое содержит трассу-ориентир с ответвлениями, первые и вторые датчики слежения, блок слежения, исполнительный механизм, датчик ответвления, формирователь, кольцевой датчик, выключатели, элемент И, усилитель и реле, причем трасса-ориентир в месте ответвления содержит экранированный участок [1].
Известно устройство для управления движением подвижного средства, содержащее последовательно соединенные основной фотодатчик, блок управления и исполнительный элемент, связанный с первым исполнительным органом, размещенным на опорной площадке, на которой расположены второй исполнительный орган и дорожка задания траектории движения, через которую основной датчик оптически связан с излучателем, кодовую дорожку и последовательно соединенные дополнительный фотодатчик, вычислительный блок и логический блок, причем кодовая дорожка выполнена на опорной площадке и оптически связана с дополнительным фотодатчиком [2].
Известно также устройство для управления подвижным объектом, содержащее ферромагнитную направляющую, закрепленную на поверхности, относительно которой перемещается объект, на котором установлены магнит со стороны ферромагнитной направляющей и блок управления, причем на подвижном объекте установлены два геркона, расположенные симметрично относительно магнита с обеспечением перпендикулярности осей герконов нейтральной плоскости магнита, расстояние между плоскостью ферромагнитной направляющей и плоскостью полюсов магнита меньше, чем расстояние между плоскостью ферромагнитной направляющей и корпусом геркона, а выводы герконов соединены с блоком управления [3].
Кроме того, известно устройство для управления движением транспортного средства, содержащее трассу-ориентир с ответвлениями, маркерами в местах ответвлений и экранированными участками после ответвлений, маркерами в местах возможных остановок транспортного средства, а также установленные в передней и задней частях транспортного средства два датчика слежения, коммутатор, блок слежения, сервопривод рулевого механизма, два датчика маркеров, два усилителя мощности, два формирователя, панель ввода, элементы И, элемент ИЛИ, два регистра, блок адресной памяти, два триггера, аварийный датчик, аналоговый мультиплексор, блок задающих сигналов, привод торможения и привод движения [4].
Известна система управления движением транспортного средства, содержащая расположенные на транспортном средстве два датчика слежения за опорной трассой, между ними датчик-ориентир ответвления, блок управления сервоприводом, элемент НЕ, два элемента ИЛИ, три элемента И и сдвиговый регистр кодов направления поворотов [5].
Известна также система управления движением транспортного средства, содержащая дорожку задания траектории, установленные на транспортном средстве блок слежения за дорожкой задания траектории и блок управления, а также датчики-ориентиры, расположенные в местах ответвления дорожки задания траектории, выполненной в виде полосы, на которой сформированы последовательность прямоугольных чередующихся намагниченных и ненамагниченных участков, причем в местах ответвления дорожки задания траектории размещен переходный участок, представляющий собой криволинейный отрезок указанной полосы, параллельной линии сопряжения ветвей дорожки и удаленной от них на расстояние, равное ширине полосы, а на транспортном средстве установлены два блока слежения за переходным участком, коммутатор, два блока увеличения длительности импульса и два датчика поворота [6].
Наиболее близким по техническому решению к заявляемой является система управления транспортным средством, которая содержит датчик слежения за светоотражающей полосой, подключаемый первым выходом к входу блока рулевого привода и включающий в себя первый и второй фотоприемники, выходы которых соединены через первый и второй усилители соответственно с первым и вторым входами первого блока выделения разностного сигнала, причем фотоприемники установлены на линии, перпендикулярной направлению движения транспортного средства, а также блок привода, последовательно соединенные датчик пройденного пути, блок сравнения, счетчик команд, блок памяти уставок и команд и блок режимов движения, причем датчик слежения за светоотражающей полосой дополнительно включает в себя третий и четвертый фотоприемники, установленные по линии, совпадающей с направлением движения транспортного средства, симметрично относительно первой пары приемников, второй и третий блоки выделения разностного сигнала, два блока с переменным знаком коэффициента передачи и сумматор, причем второй выход блока памяти уставок и команд подключен к второму входу блока сравнения, а третий и четвертый выходы - к первому и второму входам датчика слежения за светоотражающей полосой соответственно, второй вход блока режимов движения связан с вторым выходом датчика слежения за светоотражающей полосой, а выход - с входом блока привода, первые входы второго и третьего блоков выделения разностного сигнала подключены к выходу второго усилителя, а вторые входы - к выходам третьего и четвертого усилителей соответственно, связанных входами с выходами третьего и четвертого фотоприемников соответственно, выходы первого и второго блоков выделения разностного сигнала соединены с первыми входами соответствующих блоков с переменным знаком коэффициента передачи, вторые входы которых связаны с третьими и четвертыми входами датчика слежения за светоотражающей полосой соответственно, а выходы - с соответствующими входами сумматора, выход которого соединен с выходом датчика слежения за светоотражающей полосой, связанного вторым выходом с выходом третьего блока выделения разностного сигнала [7].
Однако в описанной системе управления транспортным средством не исключена возможность реализации некоторой ложной траектории движения, которая может возникнуть из-за сбоя в системе управления, приведшего к ошибочному считыванию в узловом пункте тех разрядов команды, которые определяют режим слежения за полосой. Так, например, пропажа "1" по каким-либо причинам в коде "01" - слежение за правым краем полосы - превратит его в "00" - слежение за центром полосы, и транспортное средство продолжит движение прямо вместо запрограммированного поворота вправо. Если расстояния между узловыми пунктами одинаковы (или приблизительно одинаковы), то, поскольку к датчику пройденного пути не предъявляются требования большой точности в измерении расстояния, в следующем узловом пункте будет считана следующая по порядку команда, которая ведет к продолжению движения транспортного средства по ложной траектории, и т.д. Таким образом, даже единственный сбой в работе системы может привести к образованию ложной траектории (с накоплением ошибок), что в большинстве практических случаев недопустимо, так как может привести к нежелательным и даже непоправимым последствиям. Тем не менее сбои могут произойти не только в выходных сигналах отмеченных выше двух разрядов блока памяти команд, но и в счетчике команд, в блоке сравнения и т.п.
Отмеченный недостаток (присущий, кстати, и другим устройствам) проистекает из того факта, что различные узловые пункты содержат не индивидуальные, а общие для всех узлов метки. Уточним, что узловым пунктом называют пункт возможного выполнения маневра: вперед, назад, направо, налево, сброс скорости, стоп по метке, расположенной в любом месте светоотражающей полосы. При считывании этих меток добавляется "1" в счетчик команд, и он обеспечивает считывание очередной команды из блока памяти команд, которая, в принципе, может быть выполнена в любом узловом пункте. Введение такого параметра, как расстояние до данного узлового пункта, помогает в определенной степени идентифицировать узел, но, как было показано выше, не всегда исключает ошибочное выполнение маневра, особенно в тех случаях, когда трасса состоит из системы равноудаленных узловых пунктов, размещенных в вершинах нескольких смежных квадратов.
Целью изобретения является повышение надежности осуществления программируемого движения транспортного средства вдоль "ведущей линии", выполненной, например, в виде светоотражающей полосы, имеющей взаимоперпендикулярные разветвления.
Цель достигается тем, что в системе управления транспортным средством, включающей ведущую линию движения в виде светоотражающей полосы с разветвлениями на опорной площадке, имеющую узловые пункты с опознавательными метками, и содержащей передний датчик слежения за светоотражающей полосой, подключенный двумя выходами к первым двум входам блока рулевого привода, третий и четвертый входы которого соединены с выходами блока памяти команд (к первому и второму разряду кода команды соответственно), третий, четвертый и пятый выходы которого (определяющие соответствующие разряды кода команды) соединены с входами блока режимов движения, четвертый вход которого соединен с первым выходом блока сравнения кодов, второй выход которого соединен с первым входом блока памяти команд, второй вход которого соединен с выходом счетчика команд, причем три выхода блока режимов движения соединены с тремя входами блока привода (первый вход определяет две различные скорости, второй - направление вперед-назад, третий - состояние стоп-движение), разветвления ведущей линии взаимоперпендикулярны, рядом с метками на опорной площадке (а не на ведущей линии) нанесены кодовые идентификаторы в виде кодовых масок, отображающих в двоичном коде порядковый десятичный номер узлового пункта, при этом кодовые маски, определяющие этот узловой пункт с любых сторон, имеют один и тот же двоичный код, и введены задний датчик слежения за светоотражающей полосой, передний и задний датчики кодовых идентификаторов, блок памяти кодовых идентификаторов, блок переключения датчиков слежения и датчиков кодовых идентификаторов, блок выделения меток, блок аварийной сигнализации и информации и пульт управления, при этом один из выходов пульта управления соединен с входом блока памяти кодовых идентификаторов, второй вход которого соединен с выходом счетчика команд, а выход - с первым входом блока сравнения кодов, второй и третий входы которого соединены соответственно с выходами переднего и заднего датчиков кодовых идентификаторов, первые входы которых через блок переключения датчиков слежения и датчиков кодовых идентификаторов соединены с входами соответственно переднего и заднего датчиков слежения, выходы заднего датчика слежения соединены с пятым и шестым входами блока рулевого привода и одновременно с третьим и четвертым входами блока выделения меток, первый и второй входы которого соединены с выходами переднего датчика слежения, пятый вход блока выделения меток соединен с первым выходом блока режимов движения, определяющим скорость движения транспортного средства, один из выходов блока выделения меток соединен с входом счетчика команд и одновременно с вторыми входами переднего и заднего датчиков кодового идентификатора, другой выход блока выделения меток соединен с пятым входом блока режимов движения и одновременно с первым входом блока аварийной сигнализации, второй вход которого соединен с первым выходом блока сравнения кодов, второй выход пульта управления соединен с третьим входом блока памяти команд, четвертый выход которого соединен с входом блока переключения датчиков слежения и датчиков кодовых идентификаторов.
Таким образом, для устранения недостатка предлагается снабдить все узловые пункты кодовыми идентификаторами (кодовые маски, которые представляют собой отображение в двоичном коде порядкового десятичного номера узлового пункта). Считываемые из блока памяти команды должны выполняться только в том случае, если код узлового пункта, считываемый специальным датчиком кодового идентификатора, совпадает с кодом, который был занесен в специальный блок памяти параллельно с реализуемой командой в соответствии с программой движения транспортного средства по трассе. Другими словами каждая команда должна выполняться не только по сигналу устройства, определяющего маневр в узловом пункте с помощью счетчика команд, но и при условии нахождения транспортного средства в узловом пункте с определенным номером.
Если по каким-либо причинам происходит искажение команды выполнения маневра в данном узловом пункте, то транспортное средство может ложно переместиться по трассе максимум на один перегон (т.е. до следующего узлового пункта), так как в следующем узловом пункте код, считываемый с его кодового идентификатора, не совпадает с кодом, считываемым из блока памяти, и транспортное средство будет остановлено. Остановка в этом случае может быть четко идентифицирована системой управления как особый вид остановки в результате неверного выполнения маршрута. Такое распознавание ситуации останова дает возможность в зависимости от "интеллекта" системы управления реализовать целенаправленные действия робота, например подать специальный световой или звуковой сигнал "сбой маршрута", сообщить по системе связи на пульт оператора о ситуации, сделать попытку вернуться на предыдущий узловой пункт с целью восстановления маршрута и т.д. Таким образом, реализация некоторой ложной траектории движения по трассе исключается, что и является основной целью изобретения.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство отличается наличием дополнительных датчиков - двух датчиков кодового идентификатора и датчика слежения за светоотражающей полосой (заднего) и новых блоков: блока выделения меток, блока памяти кодовых идентификаторов, блока переключения датчиков слежения и датчиков кодовых идентификаторов, блока аварийной сигнализации и информации, пульта управления и их связями с остальными элементами схемы. Таким образом, заявляемое устройство соответствует критерию изобретения "новизна".
Сравнение заявляемого решения с другими техническими решениями показывает, что эти блоки широко известны. Однако при их введении в указанной связи с остальными блоками схемы в заявляемую систему управления транспортным средством вышеуказанные блоки проявляют новые свойства, что приводит к повышению надежности программируемого движения транспортного средства вдоль ведущей линии. Это позволяет сделать вывод о соответствии технического решения критерию "существенные отличия".
На фиг. 1 изображено транспортное средство на участке трассы (ведущей линии) с несколькими узловыми пунктами; на фиг. 2 показан пример нанесения меток и кодовых идентификаторов в узле N 11; на фиг. 3 представлена структурная схема устройства управления транспортным средством; на фиг. 4 показан пример реализации блока режимов движения; на фиг. 5 - пример реализации блока привода; на фиг.6 - пример реализации блока рулевого привода; на фиг. 7 - пример реализации блока выделения меток; на фиг. 8 - пример реализации блока переключения датчиков слежения и датчиков кодовых идентификаторов; на фиг. 9 - пример реализации блока аварийной сигнализации и информации; на фиг. 10 - пример реализации датчиков кодовых идентификаторов; на фиг. 11 - пример реализации формирователей прямоугольных импульсов заданной длительности; на фиг. 12-15 приведены временные диаграммы работы блока выделения меток.
Система управления транспортным средством содержит передний (первый) 1 и задний (второй) 2 датчики слежения за светоотражающей полосой, соединенные с блоком 3 рулевого привода и с блоком 4 выделения меток, который через счетчик 5 команд соединен с блоком 6 памяти кодовых идентификаторов. Блок 4 выделения меток соединен также с передним 7 и задним 8 датчиками кодового идентификатора, выходы которых соединены с входами блока 9 сравнения кодов. Выход последнего соединен с входом блока 10 памяти команд, выходы которого соединены с входами блока 11 режимов движения, выходы которого (первый выход по скорости, второй по направлению вперед-назад, третий по состоянию стоп-движение) соединены с входами блока 12 привода. С датчиками 1 и 2 слежения за светоотражающей полосой и датчиками 7 и 8 кодового идентификатора соединен блок 13 переключения датчиков слежения и датчиков кодового идентификатора. С входами блока 6 памяти кодовых идентификаторов и блока 10 памяти команд соединены выходы пульта 14 управления. Блок 4 выделения меток 4 соединен с одним из входов блока 15 аварийной сигнализации и информации.
Перед началом функционирования транспортного средства 16 на опорной площадке на ведущей линии (трассе) осуществляется сквозная нумерация узловых пунктов (пунктов возможного выполнения маневра) в виде десятичных чисел 1.2. . . М. Вокруг каждого узлового пункта по всем возможным направлениям движения через него нанесены метки 17 в виде разрывов светоотражающей полосы 18 (полосы-ориентира) при использовании оптически контрастной ведущей линии и кодовые идентификаторы 19 (кодовые маски с n двоичными разрядами), так, чтобы двоичный код отображал десятичный номер узла (очевидно n ≥ log2M). Пример выполнения кодового идентификатора 19 для узла N 11 показан на фиг. 2, где белый цвет означает "1" в соответствующем двоичном разряде; черный - "0", общее число разрядов n = 8 (M = 256) и младший разряд занимает крайнее правое положение (помечен точкой). Узловые пункты остановок, расположенные между взаимоперпендикулярными узловыми пунктами, имеют только одну метку 17 и два кодовых идентификатора 19 в соответствии с двумя возможными направлениями движения через них (фиг. 1).
Система работает следующим образом.
Перед запуском транспортного средства осуществляется программирование его движения по трассе. С этой целью с помощью пульта 14 управления в блок 6 памяти кодовых идентификаторов занесены номера всех взаимоперпендикулярных узловых пунктов и узловых пунктов остановки в порядке их прохождения по ведущей линии (программируемой траектории). Номера занесены в виде n -разрядных двоичных чисел, причем так, что адрес номера последующего узлового пункта на "1" больше адреса предыдущего.
В блок 10 памяти команд занесены коды команд по адресам, совпадающим с адресами кодовых идентификаторов 19 узловых пунктов в блоке 6 памяти кодовых идентификаторов, в которых эти команды должны быть выполнены. Код команды состоит из m двоичных разрядов. В частности, в прототипе первые два разряда используются для кодирования команд маневра (01 - влево, 10 - вправо, 00 - прямо), третий разряд - для кодирования скорости движения ("0" номинальная, или крейсерская скорость Vo, "1" - малая скорость V1), четвертый разряд - для команды направления движения ("1" - "назад", "0" - "вперед"), пятый разряд - для команды останова ("1" - стоп, "0" - движение). Может быть использована и любая другая структура кодов команд, но для определенности в дальнейшем исходят из структуры, описанной выше.
Блок 11 режимов движения содержит блок 20 инверторов, триггеры 21, 22 и 23, элемент ИЛИ 24 (фиг.4).
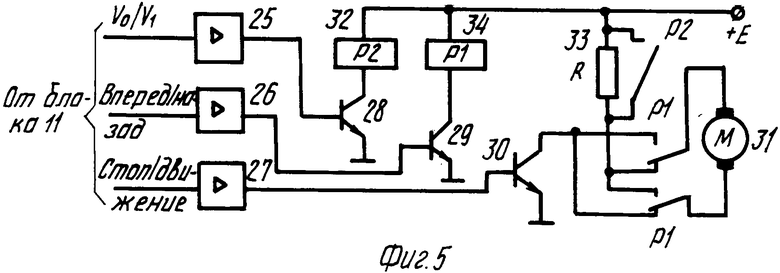
Блок 12 привода состоит из усилителей 25, 26, 27, транзисторов 28, 29, 30, двигателя 31, реле 32, резистора 33 и реле 34 (фиг.5).
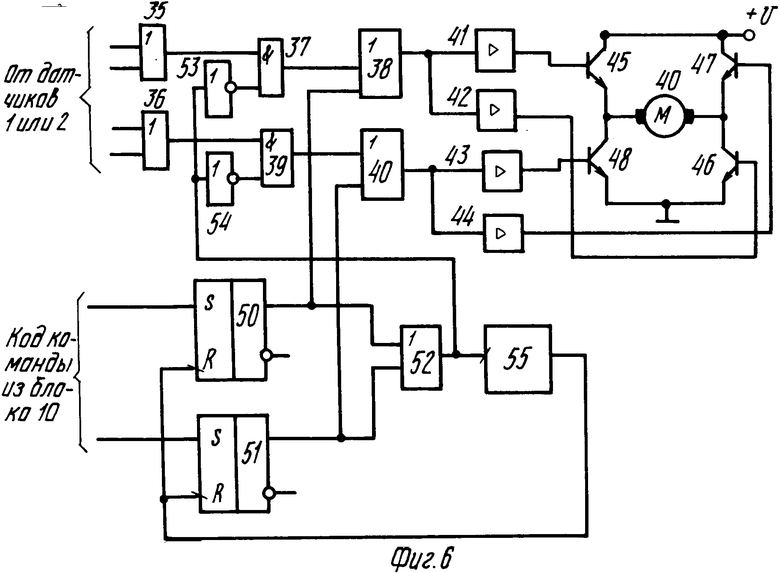
Блок 3 рулевого привода содержит элементы ИЛИ 35 и 36, элемент И 37, элемент ИЛИ 38, элемент И 39, элемент ИЛИ 40, усилители 41-44, транзисторы 45-48, двигатель 49, триггеры 50 и 51, элемент ИЛИ 52, элементы НЕ 53 и 54, формирователь 55 прямоугольного импульса (фиг.6).
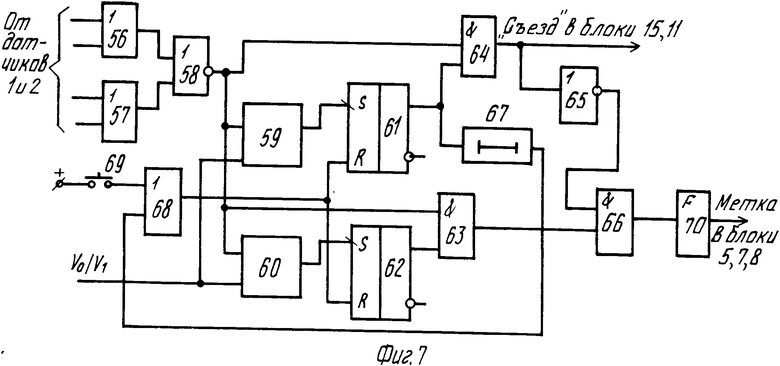
Блок 4 выделения меток содержит элементы ИЛИ 56 и 57, элемент ИЛИ-НЕ 58, управляемые формирователи 59 и 60 прямоугольных импульсов заданной длительности, триггеры 61 и 62, элементы И 63 и 64, инвертор 65, элемент И 66, элемент 67 задержки, элемент ИЛИ 68, кнопку 69, формирователь 70 прямоугольного импульса (фиг.7).
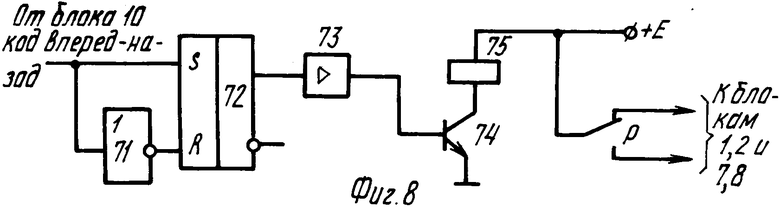
Блок 13 переключения датчиков слежения и датчиков кодовых идентификаторов содержит инвертор 71, триггер 72, усилитель 73, транзистор 74, реле 75 (фиг.8).
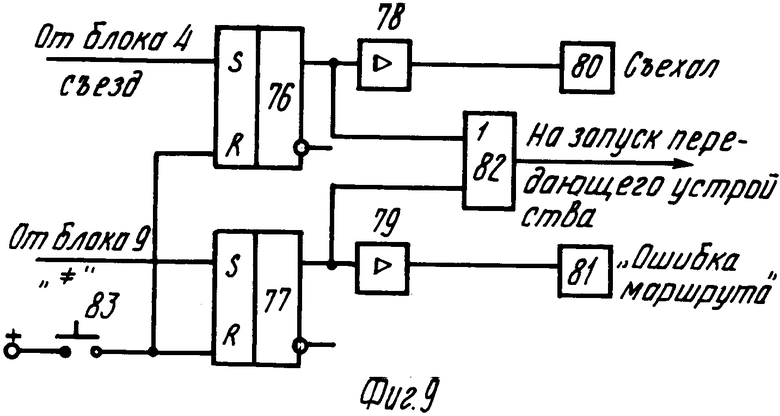
Блок 15 аварийной сигнализации и информации содержит триггеры 76 и 77, усилители 78 и 79, устройства индикации 80 и сигнализации 81, элемент ИЛИ 82 и кнопку 83 (фиг.9).
Предлагаемая система управления транспортным средством работает следующим образом.
С пульта 14 управления производится программирование движения. После команды "пуск" поступают управляющие сигналы на блок 12 привода, транспортное средство 16 начинает движение вперед вдоль светоотражающей полосы-ориентира 18, удерживаясь на ней с помощью переднего датчика 1 слежения. При наезде на первую встречную метку 17 происходит ее считывание блоком 4 выделения меток, выходной сигнал которого записывает первую "1" в счетчик 5 команд и включает передний датчик 7 кодового идентификатора, который считывает код с кодового идентификатора 19. По сигналу счетчика 5 команд происходит считывание из блока 6 памяти кодовых идентификаторов кода с адресом 1, который несет информацию о номере первого узлового пункта. Этот код поступает на один из входов блока 9 сравнения, на второй вход которого поступает код с датчика 7 кодового идентификатора. В случае совпадения этих кодов блок 9 сравнения выдает сигнал на выходе (=) - сигнал разрешения на считывание кода команды из блока 10 памяти команд. В результате считана команда по адресу 1. Первые два разряда этого кода поступают на входы блока 3 рулевого привода, а остальные разряды - на входы блока 11 режимов движения, которые соответствующим образом воздействуют на транспортное средство 16 (обеспечивают или поворот и (или) изменение скорости, и (или) реверс направления движения). В частности, при считывании "1" в четвертом разряде команды ("назад") блок 13 переключения датчиков слежения и датчиков кодовых идентификаторов производит отключение передних и включение задних датчиков 2 слежения и датчиков 8 кодовых идентификаторов. При этом считывание информации этими датчиками происходит так же, как и при движении вперед, за счет симметричного расположения их на корпусе транспортного средства 16 (фиг.1) и соответствующего (зеркального) нанесения кодовых идентификаторов 19 на трассе (фиг.2).
После выполнения маневра в первом узловом пункте транспортное средство приближается к следующей метке, считает ее блоком 4 выделения меток, который записывает очередную "1" в счетчик 5 команд. Из блока 6 памяти кодовых идентификаторов считывается номер очередного узлового пункта (по адресу 2), который сопоставляется затем с кодом на выходе датчика кодовых идентификаторов (7 или 8) в блоке 9 сравнения. В случае равенства этих кодов блок сравнения выдает сигнал на выходе (=) разрешения считывания команды из блока 10 памяти команд, и в итоге произведен маневр транспортного средства, определяемый кодом команд, имеющейся в блоке памяти по адресу 2. Если коды не совпадают (например, из-за ложного маневра на предыдущем узловом пункте), то блок 9 сравнения выдает сигнал на другом выходе (≠), который поступает на специальный вход блока 11 режимов движения и вызывает аварийный останов транспортного средства 16. Кроме того, этот сигнал поступает на вход блока 15. В отличие от останова по команде "стоп" ("1" в пятом разряде кода команды) аварийный останов сопровождается подачей того или иного аварийного сигнала (светового, цветового, звукового и т.п.) для привлечения внимания обслуживающего персонала.
Когда в системе управления робота предусмотрена связь с диспетчерским постом, возможна выдача диспетчеру точной информации о месте и причине сбоя выполнения маршрута посредством блока 15 аварийной сигнализации и информации.
Таким образом, предлагаемая система позволяет легко запрограммировать любое движение по любой трассе транспортного средства (включая движение вперед-назад, многократное прохождение одних и тех же узловых пунктов, остановку и т.п.), однако реализация какой-либо ложной траектории практически исключена. Возможно лишь "ложное" движение в пределах одного перегона.
Следует отметить, что в предлагаемой системе исключен такой блок, как датчик пройденного пути, который обычно имеет достаточно сложную конструкцию и схемную реализацию. Остальные блоки, входящие в предлагаемое устройство, могут быть выполнены по широко известным принципам. Так, датчики слежения за светоотражающей полосой выполняются на базе двух фотоприемников (фотодиодов) с формированием сигналов "1" (движение над белой полосой), "0" (движение над черной полосой) и подачей их на входы блока рулевого привода и блока выделения меток.
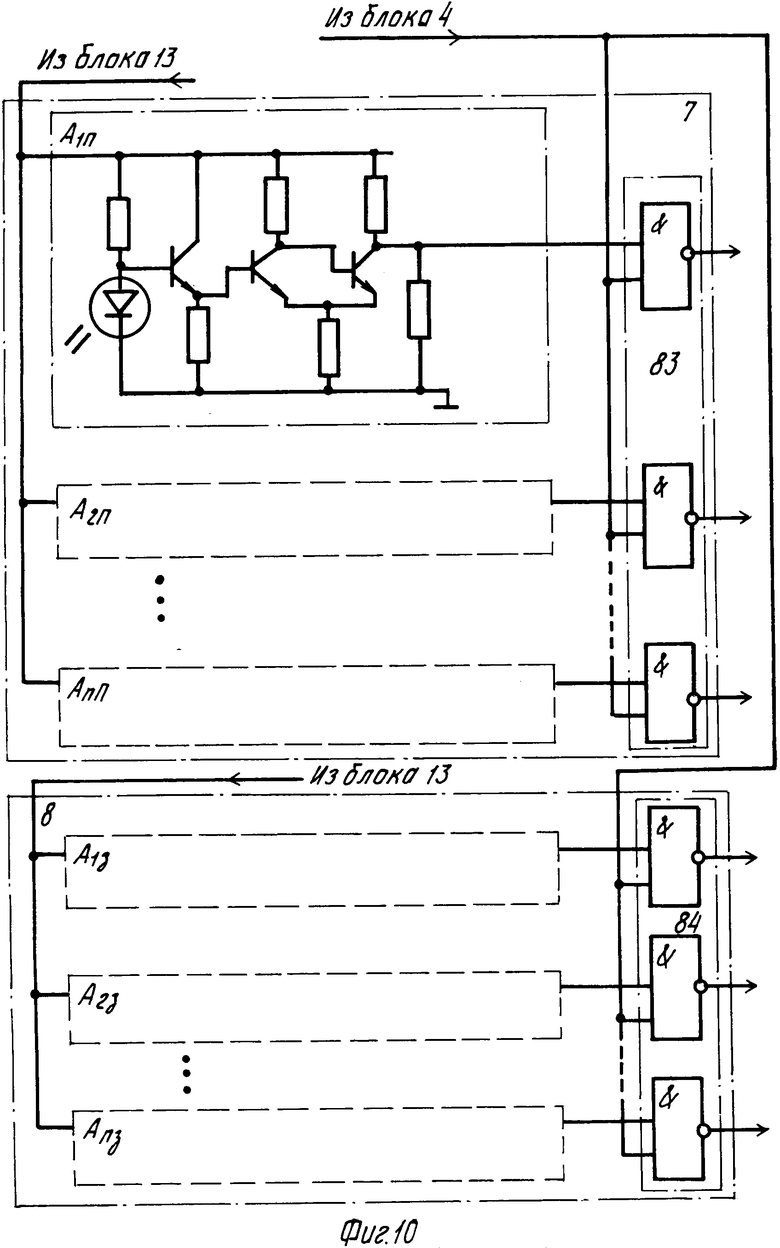
Датчики кодовых идентификаторов представляют собой совокупность n-разрядных фотоприемников с выделением сигналов логического "0" и логической "1" на их выходе. Вариант схемной реализации датчиков кодовых идентификаторов представлен на фиг.10, где А1п - первый канал А переднего датчика, Аnп - n-й канал А переднего датчика, А1з - первый канал А заднего датчика, Аnз - n-й канал А заднего датчика. Схема одного из каналов А представлена на фиг. 10 и аналогична известным схемам (см., например, Аксененко М.Д., Бараночников М. Л. , Смолин О.В. Микроэлектронные фотоприемные устройства. М.: Энергоатомиздат, 1984, с.120, рис. 4.39). Сигнал из блока 13 в приведенном примере схемной реализации устройства отключает питание задних датчиков 8 кодовых идентификаторов и подключает питание передних датчиков 7 кодовых идентификаторов. Сигнал из блока 4 разрешает передачу информации от датчиков 7 и 8 кодовых идентификаторов в блок 9 через блоки 83 и 84 элементов И-НЕ. Это сделано для того, чтобы система управления движением была инвариантна к направлению движения транспортного средства. Само направление движения при этом определяется только кодовой комбинацией вперед-назад, которая вырабатывается в блоке 11 режимов движения и поступает на блок 12 привода и на блок 13 переключения.
Эти блоки реализуют все необходимые переключения, связанные с изменением направления вращения приводов и включением соответствующих датчиков кодовых идентификаторов (передних и задних).
Блок 9 сравнения кодов выполняется на базе двух регистров с параллельной записью информации в них и с последующим поразрядным сравнением выходных сигналов (например, микросхемы К 564 ИП2). Блоки памяти команд и кодовых идентификаторов представляют собой серийные интегральные ППЗУ (например, К 1601 РР1) или ОЗУ (например, К 134 РУ 6, К 505 РУ6А) с электрической перезаписью информации.
Блок 11 режимов движения может быть реализован, например, по блок-схеме, представленной на фиг.4. Три разряда кода команды поступают из блока 10 на вход блока 20 инверторов, на выходе которого появляются сигналы, фиксируемые с помощью триггеров 21, 22, 23. Сброс в "0" триггера 21, который определяет останов транспортного средства, может произойти не только по команде, но и в случае поступления сигнала "Съезд" из блока 4 или при поступлении сигнала (≠) из блока 9. Эти все сигналы поступают на триггер 21 через элемент ИЛИ 24.
Блок 12 привода может быть реализован по блок-схеме представленной на фиг. 5. Сигналы управления, поступающие из блока 11 режимов движения, усиливаются усилителями 25, 26, 27, которые управляют транзисторами 28, 29, 30, включение и выключение которых определяет состояние блока привода, а именно движение или остановку, скорость Vo или V1 и направление вращения двигателя 31. При этом транзистор 30 определяет режим "останов-движение", транзистор 28 с помощью реле 32 и резистора 33 определяет скорость Vo или V1, транзистор 29 с помощью реле 34 определяет направление вращения двигателя 31.
Блок 3 рулевого привода может быть выполнен по блок-схеме, представленной на фиг.6. Сигналы от фотодатчиков 1 (или 2) через элементы ИЛИ 35 и 36 поступают на входы блока 3, далее через логические элементы И 37, ИЛИ 38, И 39, ИЛИ 40 - на усилители 41-44, а с их выходов на транзисторы 45, 46 или 47, 48 подключающие к источнику питания двигатель 49. Если сигналы от фотодатчиков имеют нулевой уровень, т.е. транспортное средство движется точно вдоль полосы-ориентира, то транзисторы 45-48 выключены и двигатель 49 не вращается. Если на выходе одного из датчиков появляется сигнал уровня "1", то это означает, что транспортное средство начинает отклоняться от направления, определяемого полосой-ориентиром. Этот сигнал вызывает включение соответствующей пары транзисторов 45, 46 или 47, 48, которые подключают двигатель 49 к источнику питания в такой полярности, что его вращение ведет к возвращению транспортного средства на полосу-ориентир, т.е. к положению, когда сигналы с обоих датчиков имеют нулевой уровень. Когда из блока 10 памяти команд поступает код команды на поворот, он фиксируется в триггерах 50, 51. Как только на выходе любого из триггеров (50 или 51) появится сигнал высокого уровня, означающий поворот в определенную сторону, то через элементы ИЛИ 52, НЕ 53, 54 запираются логические элементы И 37 и 39, а на входы усилителей 41-44 поступает сигнал поворота с триггеров 50, 51 через элементы ИЛИ 38, 40. Таким образом, двигатель 49 поворота приведен в движение по приоритету кода команды. Одновременно с этим запускается формирователь 55, вырабатывающий импульс фиксированной длительности, который определяет время маневра и соответственно угол поворота. По окончании этого импульса происходит сброс триггеров 50, 51, и управление двигателем поворота снова осуществляется от фотодатчиков.
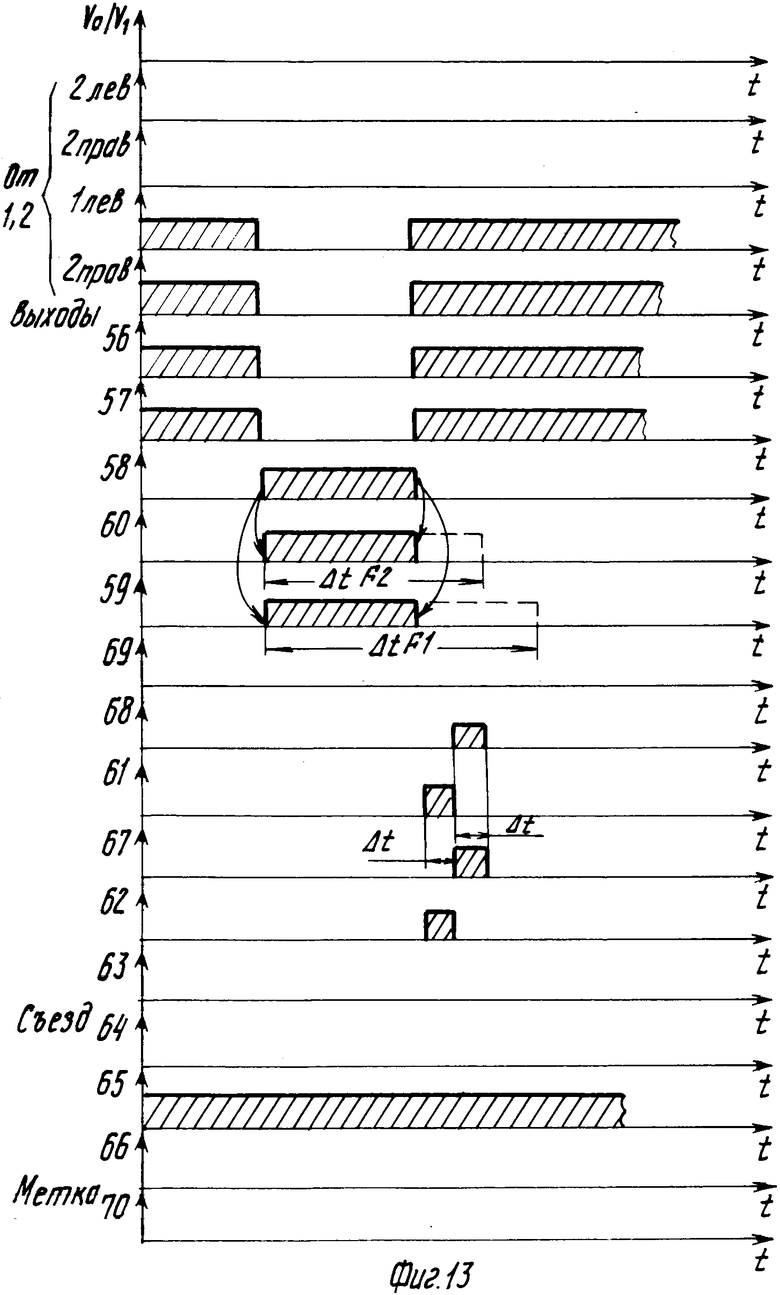
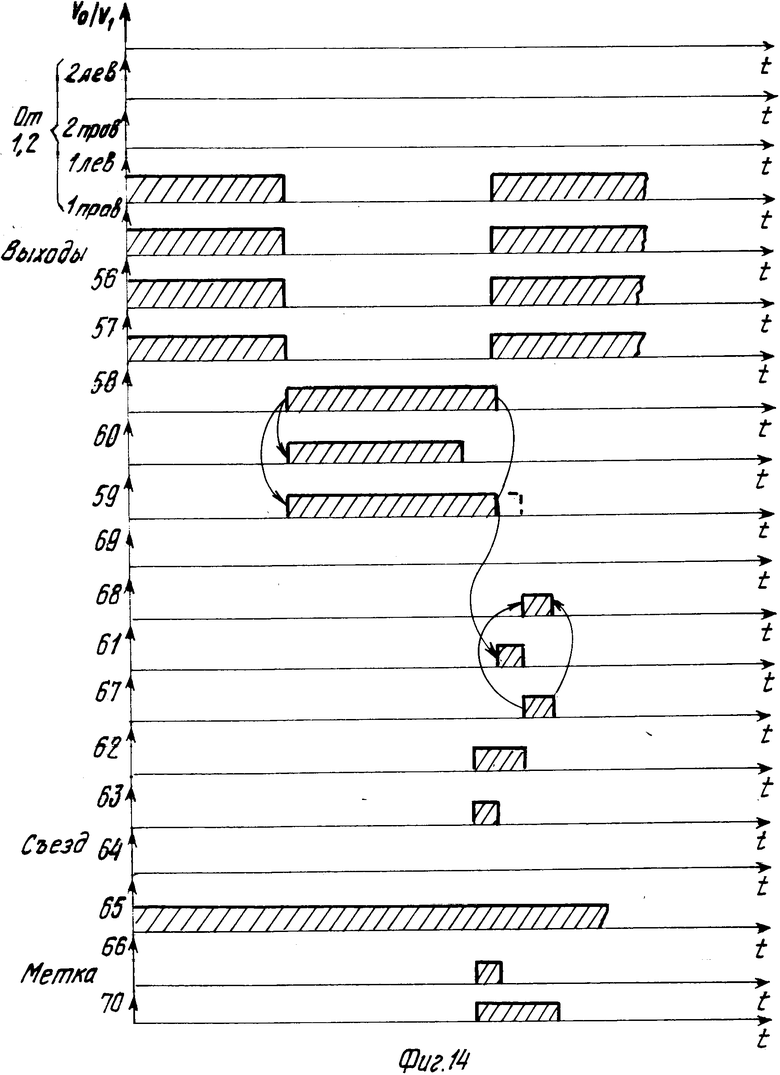
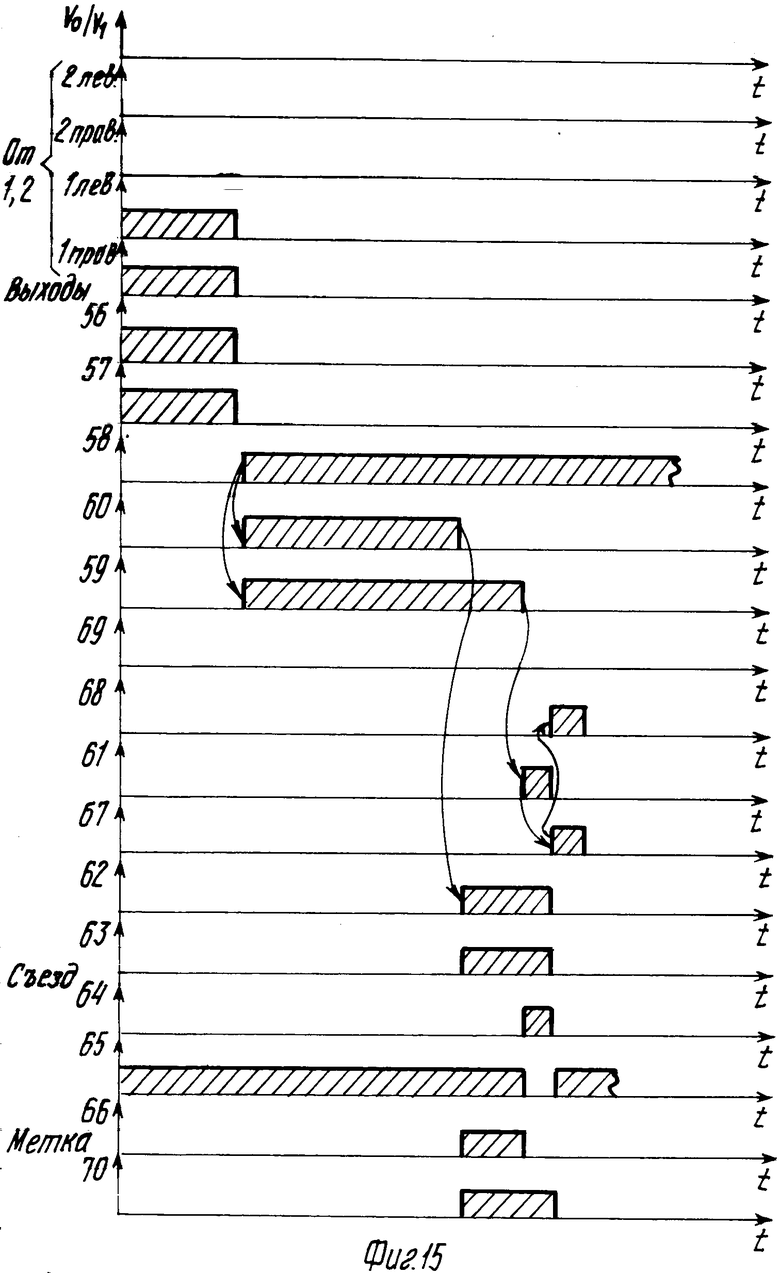
Блок 4 выделения меток может быть реализован по блок-схеме, представленной на фиг.7. Работа блока основана на том, что метка представляет собой такой элемент полосы-ориентира, который формирует на выходах фотодатчиков 1 и 2 одновременно сигналы низкого уровня. Для светоотражающей полосы это может быть черная полоса поперек белой. Для индукционного кабеля это экранированный участок. Протяженность метки имеет строго фиксированную величину, что дает возможность отличить ее от помех. Работа блока 4 выделения метки основана на определении длины участка полосы-ориентира, на котором от датчиков 1 и 2 поступают сигналы низкого уровня. При приходе с обоих датчиков 1 и 2 через элементы ИЛИ 56, 57 сигналов низкого уровня на выходе элемента ИЛИ-НЕ 58 появляется сигнал, запускающий два формирователя 59, 60 интервалов времени. Этот сигнал является как запускающим, так и определяющим процесс формирования импульсов, т.е. при его исчезновении процесс формирования интервалов времени немедленно прекращается. Длительность интервала времени ΔtF1≥ΔtF2 . Задними фронтами импульсов, получаемых на выходе формирователей, т.е. по окончании интервалов времени, запускаются триггеры 61 и 62 соответственно. Если при запуске триггера 62 на выходе элемента И 63 появляется высокий уровень сигнала, то это означает, что участок полосы, над которым проходят фотодатчики, больше минимальной длины метки. Если при запуске триггера 61 на выходе элемента И 64 появляется высокий уровень сигнала, то это означает, что анализируемый участок полосы больше максимальной длины метки, и в этом случае выдается сигнал "Съезд" с полосы-ориентира. Если после запуска триггеров 61 на выходе элемента И 64 имеется низкий уровень, то это означает, что анализируемый участок полосы больше минимального размера метки и не превышает максимальный размер метки, т.е. это и есть метка. Этот сигнал формируется с помощью элементов инвертора 65, элемента И 66. Через время, определяемое длительностью задержки элемента 67, происходит сброс триггеров 61, 62 в исходное состояние через элемент ИЛИ 68. Сброс триггеров можно произвести вручную кнопкой 69. Поскольку транспортное средство может иметь разные скорости, то в соответствии с заданной скоростью изменяются и длительности интервалов времени, генерируемые формирователями 59, 60.
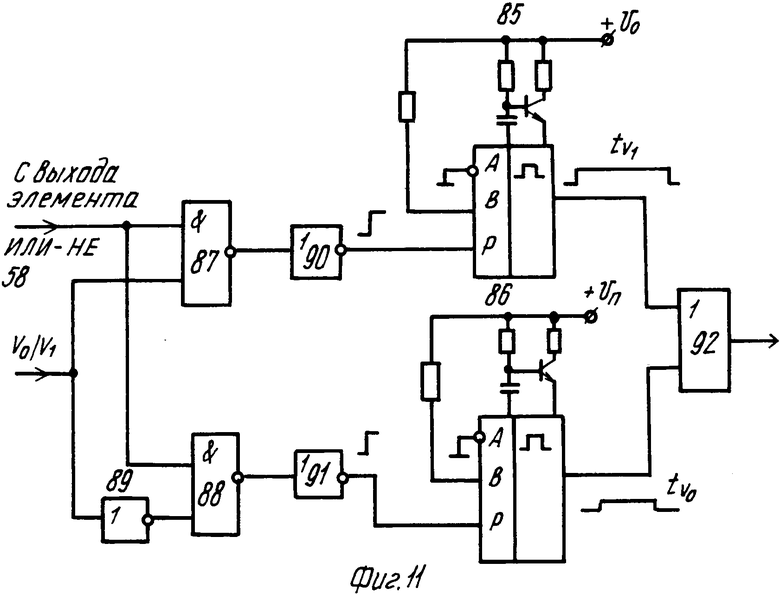
Вариант схемной реализации одного из формирователей 59, 60 интервалов времени, входящих в состав блока 4, с учетом воздействия на эти блоки сигналов Vо/V1 представлен на фиг. 11. Учитывая, что номинальной скорости Voсоответствует уровень "0" в третьем разряде кода скорости движения, а малой скорости V1 - уровень логической "1", и то, что на большой скорости длительность формируемого интервала должна быть меньше, чем для малой скорости, схема формирователя может иметь следующий вид (см. фиг.11). Схема построена с использованием двух ждущих мультивибраторов типа АГ-3 серии К 155 (см. Зельдин Е. А. Цифровые интегральные микросхемы в информационно-измерительной аппаратуре. Л.: Энергоатомиздат, Ленинградское отделение, 1986, с. 272, рис. 14-11, табл. 14-2). Особенностью их является тот факт, что они полностью управляемы по входу Р, т.е. перепад уровней "0" ->> "1" на входе Р является началом формирования выходного импульса, а перепад 1 ->> 0, если он пришел раньше чем сформирован выходной импульс, прекращает генерацию этого импульса. Схема содержит ждущие мультивибраторы 85 и 86, элементы И-НЕ 87 и 88, инверторы 89, 90 и 91, элемент ИЛИ 92.
Схема работает следующим образом. В схеме имеются два ждущих мультивибратора 85 и 86, каждый из которых генерирует свою (наперед заданную) длительность импульса tV1 и tVo соответственно, причем tV1>tVo. Сигнал Vo/V1 определяет разрешение запуска одного из двух ждущих мультивибраторов, а именно при Vo/V1 = 0 разрешается запуск мультивибратора 86, а при Vo/V1 = 1 - запуск мультивибратора 85. В исходном состоянии на выходах мультивибраторов 85 и 86 уровень логического "0", и на выходе элемента ИЛИ 92 также уровень логического "0". Приход сигнала с выхода элемента ИЛИ-НЕ 58 фиг.7 через элементы И-НЕ 87, 88 и инверторы 89, 90, 91 инициирует запуск того мультивибратора, которому разрешен запуск сигналом Vo/V1. Для определенности считают, что здесь рассмотрена реализация и работа формирователя F1. На выходе элемента ИЛИ 92 появляется сигнал с выхода работающего ждущего мультивибратора. Формирователь F2 может быть выполнен по точно такой же схеме и отличается только параметрами времязадающей цепи и соответственно длительностью выходных импульсов.
Блок 13 переключения датчиков может быть реализован по блок-схеме, представленной на фиг.8. Сигнал "Вперед-назад", поступающий на вход S непосредственно или на вход R через инвертор определяет направление движения транспортного средства и фиксируется с помощью триггера 72. Сигнал с его выхода усиливается усилителем 73 и отпирает или запирает транзистор 74. Транзистор включает или выключает реле 75, которое своими контактами p включает в работу датчики 1, 7 или 2, 8 соответственно.
Блок 15 аварийной сигнализации и информации может быть реализован по блок-схеме, представленной на фиг.9. Сигналы, определяющие аварийное состояние транспортного средства (съезд с полосы-ориентира или ошибка выполнения маршрута), поступают на входы блока 15 и фиксируются триггерами 76 и 77. С выходов этих триггеров сигналы усиливаются усилителями 78 и 79 и поступают на устройства 80 и 81 индикации и сигнализации. Через элемент ИЛИ 82 может быть произведен запуск какого-либо передающего устройства для выдачи информации диспетчеру. Кнопкой 83 производится установка блока 15 в исходное состояние.
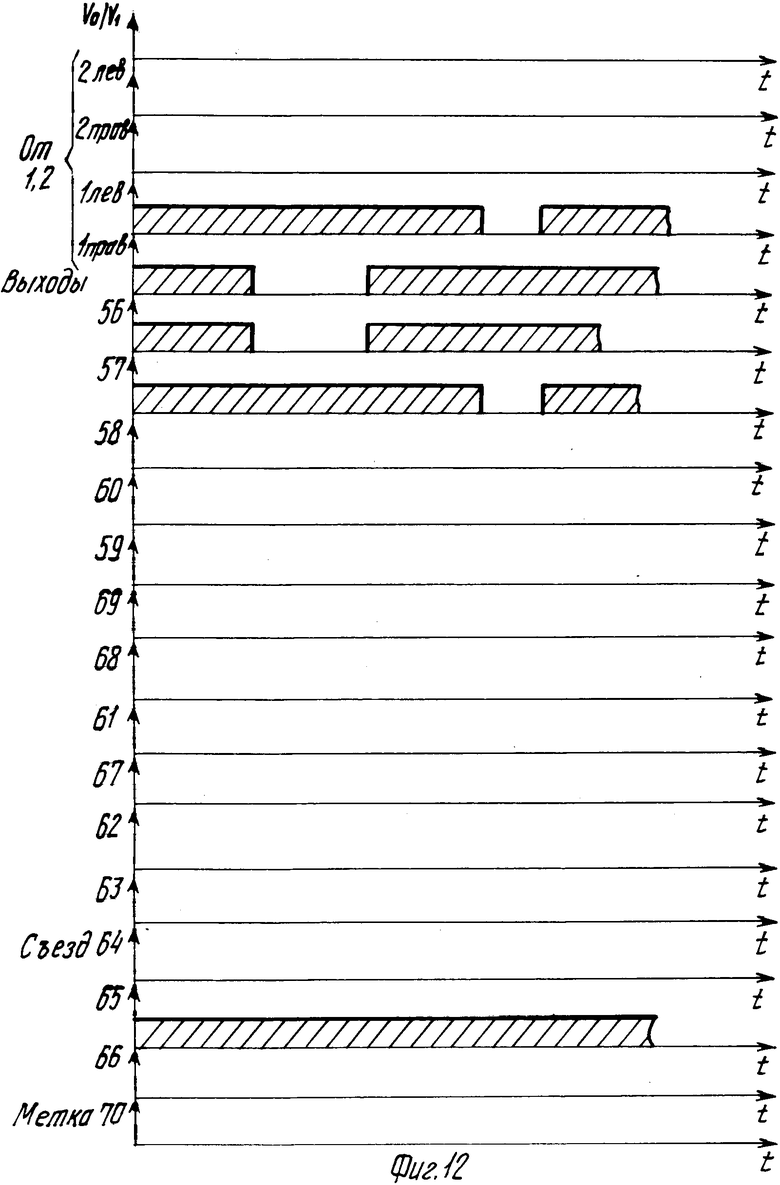
Для пояснения работы блока 4 выделения меток (фиг.7) на фиг.12-15 представлены временные диаграммы.
В связи с тем, что на вход блока 4 поступают сигналы от передних 1 или задних 2 датчиков слежения за светоотражающей полосой, работа блока определяется сочетанием этих сигналов. Сигнал Vo/V1, поступающий на блок 4, определяет длительность импульсов, генерируемых формирователями F1 и F2 на скоростях движения транспортного средства Vo и V1.
Временные диаграммы работы блока 4 представлены для следующих вариантов сочетаний сигналов от передних 1 датчиков слежения за светоотражающей полосой.
Фиг. 12. Коррекция. Транспортное средство отклонилось от движения вдоль светоотражающей полосы, и один из датчиков (на фиг.3 попеременно сначала правый, а затем левый) попадает на светонеотражающую часть полосы (при отклонении вправо или влево) с последующей коррекцией направления движения и возвратом обоих датчиков на светоотражающую полосу. Как видно из диаграмм, при этом в блоке не формируются сигналы "Метка" или "Съезд".
Фиг. 13. Помехи. В процессе движения транспортное средство датчиками слежения наезжает на светонеотражающую полосу поперек направления движения, которая не является меткой, т.е. на полосу, представляющую собой "помеху". При этом ширина "помехи" меньше ширины метки. Как видно из диаграмм, в этом случае в блоке 4 не формируются сигналы "Метка" или "Съезд".
Фиг. 14. Прием метки. Транспортное средство датчиками слежения наезжает на светонеотражающую полосу поперек направления движения, которая является меткой, т.е. имеет определенную (заданную) ширину. При этом время, в течение которого датчики слежения проходят над меткой, больше времени импульса, формируемого F1 (60) - ΔtF1, но меньше времени импульса, формируемого F2 (59) - ΔtF2 . Как видно из диаграмм, при этом на выходе блока 4 появляется сигнал "Метка".
Фиг.15. Съезд. Датчики слежения в течение времени, заранее определенного, но большего, чем "время метки", движутся над светонеотражающей полосой (оба - правый и левый). Фактически это означает потерю светоотражающей полосы или ее отсутствие, или большую помеху и т.д., т.е. дальнейшая коррекция направления движения невозможна, и требуется останов транспортного средства. Как видно из диаграмм, при этом блок 4 вырабатывает сигнал "Съезд" на выходе элемента И 64 (фиг.7), который поступает, в частности, на элемент ИЛИ 24 (фиг.4 - от блока 4) и вызывает останов транспортного средства.
Формирователи 55, 70 прямоугольных импульсов могут быть реализованы по известным схемам ждущих мультивибраторов (см., например, Зельдин Е.А. Цифровые интегральные микросхемы в информационно-измерительной аппаратуре. Л.: Энергоатомиздат. Ленинградское отделение, 1986, с. 272, рис. 14.11).
Таким образом, по сравнению с прототипом предлагаемая система обладает следующими преимуществами - существенно повышает надежность определения пункта выполнения маневра и соответственно уменьшает возможность движения по ложному (незапрограммированному) маршруту. В крайнем случае возможно ложное движение до следующей метки, где обязательно происходит останов с выдачей аварийной сигнализации.
СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ, содержащая ведущую линию движения в виде светоотражающей полосы с разветвлениями, имеющую узловые пункты с опознавательными метками, передний датчик слежения за светоотражающей полосой, подключенный двумя выходами к первым двум входам блока рулевого привода, третий и четвертый входы которого соединены соответственно с первым и вторым выходами блока памяти команд, третий, четвертый и пятый выходы которого соединены соответственно с первым, вторым и третьим входами блока режимов движения, четвертый вход которого соединен с первым выходом блока сравнения кодов, второй выход которого соединен с первым входом блока памяти команд, второй вход которого соединен с выходом счетчика команд, а три выхода блока режимов движения соединены с тремя входами блока привода, отличающаяся тем, что разветвления ведущей линии взаимно перпендикулярны, рядом с метками на опорной площадке нанесены кодовые идентификаторы и введены задний счетчик слежения за светоотражающей полосой, передний и задний датчики кодовых идентификаторов, блок переключения датчиков слежения и датчиков кодовых идентификаторов, блок выделения меток, блок аварийной сигнализации и информации и пульт управления, при этом один из выходов пульта управления соединен с первым входом блока памяти кодовых идентификаторов, второй вход которого соединен с выходом счетчика команд, а выход - с первым входом блока сравнения кодов, второй и третий входы которого соединены соответственно с выходами переднего и заднего датчиков кодовых идентификаторов, первые входы которых соединены с соответствующими выходами блока переключения датчиков слежения и датчиков кодовых идентификаторов и с входами соответственно переднего и заднего датчиков слежения за светоотражающей полосой, выходы заднего датчика слежения за светоотражающей полосой соединены с пятым и шестым входами блока рулевого привода и с первым и вторым входами блока выделения меток, третий и четвертый входы которого соединены с выходами переднего датчика слежения за светоотражающей полосой, пятый вход блока выделения меток соединен с первым выходом блока режимов движения, один из выходов блока выделения меток соединен с входом счетчика команд и вторыми входами переднего и заднего датчиков кодового идентификатора, другой выход блока выделения меток соединен с пятым входом блока режимов движения и одновременно с первым входом блока аварийной сигнализации, второй вход которого соединен с первым выходом блока сравнения кодов, второй выход пульта управления соединен с третьим входом блока памяти команд, четвертый выход которого соединен с входами блока переключения датчиков слежения и датчиков кодовых идентификаторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 1998 |
|
RU2143334C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 2000 |
|
RU2187832C2 |
| Система управления транспортным средством | 1984 |
|
SU1242919A1 |
| Устройство для управления транспортными средствами | 1987 |
|
SU1437879A1 |
| СИСТЕМА МОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2010 |
|
RU2422641C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2530704C1 |
| Устройство для автоматического управления движением траспортного средства | 1977 |
|
SU690450A1 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ УГОНУ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2264935C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 1991 |
|
RU2042169C1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
Изобретение относится к автоматике и может быть использовано в системах управления внутрицеховыми безрельсовыми средствами в гибких автоматизированных производствах. Цель изобретения - повышение надежности программируемого движения. Система управления транспортным средством содержит ведущую линию движения с узловыми пунктами возможного выполнения маневров вперед, назад, направо, налево, сброс скорости, стоп по метке, расположенной в любом месте ведущей линии движения. Рядом с метками на опорной площадке нанесены кодовые идентификаторы в виде кодовых масок, отображающих в двоичном коде порядковый десятичный номер узлового пункта. Система управления транспортным средством также содержит датчики слежения, датчики кодовых идентификаторов и блоки рулевого привода, выделения меток, памяти кодовых идентификаторов, сравнения кодов, памяти команд, режимов движения, переключения датчиков слежения и датчиков кодовых идентификаторов, аварийной сигнализации и информации, пульт управления и счетчик команд. Это существенно повышает надежность определения пункта выполнения маневра и соответственно уменьшает возможность движения по ложному (т.е. незапрограммированному) маршруту. В крайнем случае возможно ложное движение до следующей метки, где обязательно происходит останов с выдачей аварийной сигнализации. 15 ил.
СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ, содержащая ведущую линию движения в виде светоотражающей полосы с разветвлениями, имеющую узловые пункты с опознавательными метками, передний датчик слежения за светоотражающей полосой, подключенный двумя выходами к первым двум входам блока рулевого привода, третий и четвертый входы которого соединены соответственно с первым и вторым выходами блока памяти команд, третий, четвертый и пятый выходы которого соединены соответственно с первым, вторым и третьим входами блока режимов движения, четвертый вход которого соединен с первым выходом блока сравнения кодов, второй выход которого соединен с первым входом блока памяти команд, второй вход которого соединен с выходом счетчика команд, а три выхода блока режимов движения соединены с тремя входами блока привода, отличающаяся тем, что разветвления ведущей линии взаимно перпендикулярны, рядом с метками на опорной площадке нанесены кодовые идентификаторы и введены задний счетчик слежения за светоотражающей полосой, передний и задний датчики кодовых идентификаторов, блок переключения датчиков слежения и датчиков кодовых идентификаторов, блок выделения меток, блок аварийной сигнализации и информации и пульт управления, при этом один из выходов пульта управления соединен с первым входом блока памяти кодовых идентификаторов, второй вход которого соединен с выходом счетчика команд, а выход - с первым входом блока сравнения кодов, второй и третий входы которого соединены соответственно с выходами переднего и заднего датчиков кодовых идентификаторов, первые входы которых соединены с соответствующими выходами блока переключения датчиков слежения и датчиков кодовых идентификаторов и с входами соответственно переднего и заднего датчиков слежения за светоотражающей полосой, выходы заднего датчика слежения за светоотражающей полосой соединены с пятым и шестым входами блока рулевого привода и с первым и вторым входами блока выделения меток, третий и четвертый входы которого соединены с выходами переднего датчика слежения за светоотражающей полосой, пятый вход блока выделения меток соединен с первым выходом блока режимов движения, один из выходов блока выделения меток соединен с входом счетчика команд и вторыми входами переднего и заднего датчиков кодового идентификатора, другой выход блока выделения меток соединен с пятым входом блока режимов движения и одновременно с первым входом блока аварийной сигнализации, второй вход которого соединен с первым выходом блока сравнения кодов, второй выход пульта управления соединен с третьим входом блока памяти команд, четвертый выход которого соединен с входами блока переключения датчиков слежения и датчиков кодовых идентификаторов.
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Система управления транспортным средством | 1984 |
|
SU1242919A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
