1
(.11) 4624194/28
(22) 22.12.88
(46) 23.06.91. Бюл. Р 23
(75) В.А.Павлов
(53)531.71/(088.8)
(56) Фотоэлектрические преобразователи информации. Под ред. Преснухи- на Л.И. - М.: Машиностроение, 1974, с. 180, рис. 93.
(54)УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ЭЛЕМЕНТА РАСТРОВОГО ДАТЧИКА ПЕРЕМЕЩЕНИЯ
(5/) Изобретение относится к измерительной технике. Цель изобретения - повышение разрешающей способности определения изменения направления перемещения подвижного элемента растрового датчика перемещения. При перемещении подвижного элемента 4 относительно неподвижного элементов 5 на выходе
фотоприемников 8,9 формуруются сигналы, сдвинутые друг относительно друга на 90°. Нуль-орган 10 формирует прямоугольный сигнал. Клок 11 цифрового дифференцирования формирует логический сигнал, уровень которого определяется знаком производной сигнала, снимаемого с фотоприемника 9. Знак производной определяется с разрешающей способностью компараторов 1 I уровня, осуществляющих дискриминацию входного сигнала по квантованным по амплитуде уровням. Знак производной сигнала, снимаемого с фотоприемника 9, выделяется фазовым детектором 17, входящим в дешифратор 13. Логический сигнал, формируемый на выходе элемента ИСКШЧАЭДЕЕ ИЛИ 18, характеризует направление перемещения подвижного элемента 4. 3 ил.
(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017156C1 |
| Устройство для измерения рабочего отрезка объективов | 1982 |
|
SU1049768A1 |
| Многокоординатное устройство для управления | 1989 |
|
SU1777121A2 |
| Растровый преобразователь перемещения | 1985 |
|
SU1348643A1 |
| Способ измерения углового перемещения объекта | 1989 |
|
SU1791705A1 |
| Способ определения направления вращения и перемещения и устройство для его осуществления | 1988 |
|
SU1663557A1 |
| Фотоэлектрический преобразователь перемещений | 1983 |
|
SU1180693A1 |
| Фотоэлектрический преобразователь перемещения в фазовый сдвиг сигнала | 1982 |
|
SU1030828A1 |
| Устройство для измерения перемещений объекта | 1984 |
|
SU1180694A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ И УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1993 |
|
RU2091708C1 |
Изобретение относится к измерительной технике и может быть использовано для измерения направления перемещения подвижного элемента в растровых датчиках перемещения.
Цель изобретения - повышение разрешающей способности определения изменения направления перемещения подвижного элемента растрового датчика перемещения.
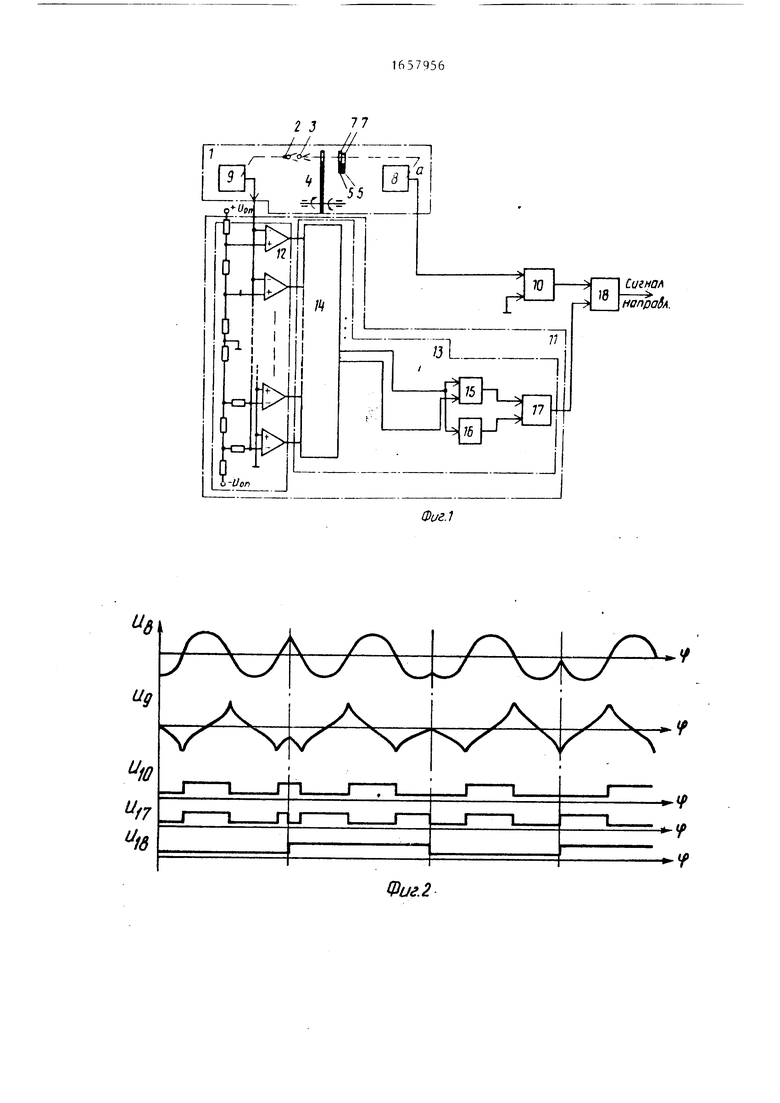
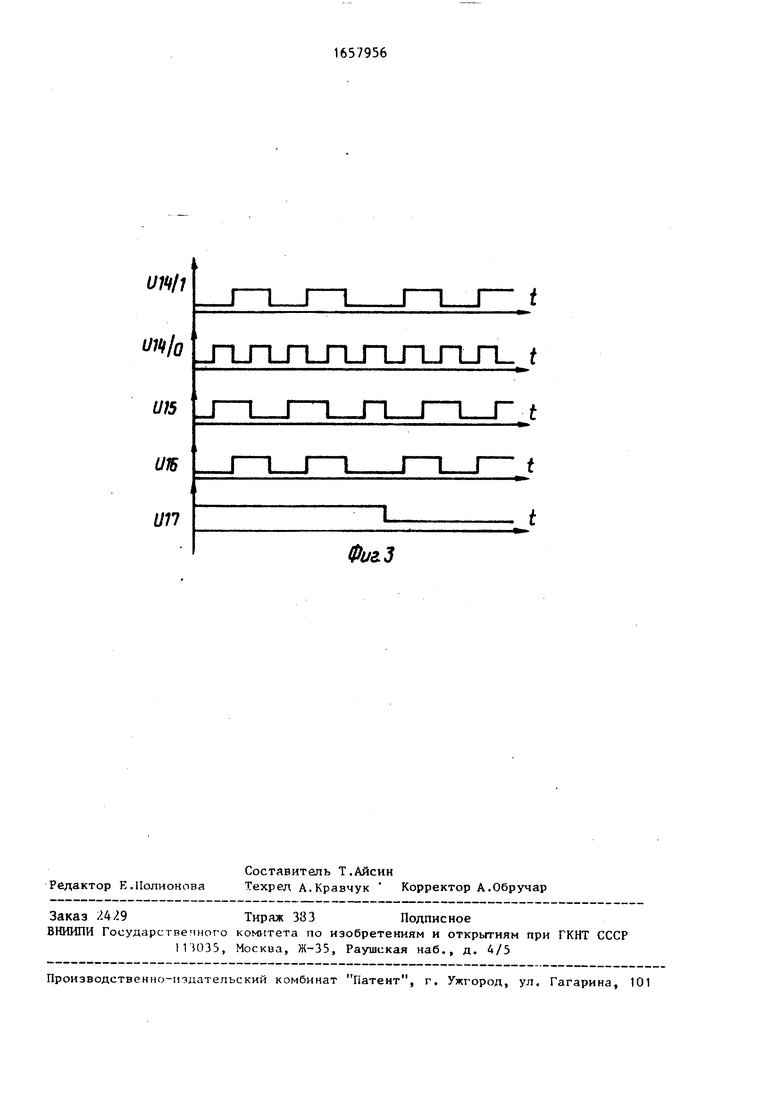
На фиг. 1 представлена функциональная схема устройства; на фиг. 2, 3 - временные диаграммы сигналов, формируемых на выходах отдельных узлов устройства.
Устройство содержит растровый датчик 1 перемещения, выполненный в виде оптически связанных источников 2,3 света, подвижного и непо- движчого элементов 4,5 с нанесенными измерительной и индикаторными решетками 6,7, сдвинутыми друг относительно друга на четверть периода, фотоприемники 8,9, нуль-орган 10, подключенный к фотоприемнику 8, блок 11 цифрового дифференцирования, выполненный в виде компараторов 12 уровня, входы которых подключены к фотоприемнику 9, дешифратора 13, выполненного в виде дешифратора 14 кода, входы которого подключеОЭСП
1
со
СП
Р
ны к компараторам 1Л уровня, элементы ИСКЛЮЧАЮЩЕЕ ИЛИ 15, входы которого подключены к нулевому и первому выходам дешифратора 14 кода, элемента НЕ 16, вход которого подключен к первому выходу дешифратора 14 кода, фазовый детектор 17, входы которого подключены к выходам элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 15 и элемента НЕ 16, элемент ИСКЛЮЧАЮ ЩЕЕ ИЛИ 13, входы которого подключены к выходам нуль-органа 10 и выходу фазового детектора 17.
Устройство работает следующим образом.
Источники .,3 света формируют пучки лучей, которые проходят через измерительную решетку 6, индикаторные решетки 7 и попадают на фотоприемни- ки 8,9. При перемещении подвижного элемента 4 относительно неподвижных элементов 5 на выходе фотоприемников 8,9 формируются сигналы, фазы которых умещены друг относительно друга на i90° . Сигнал с фотоприемника 8 посту- пает на нуль-орган 10.
Сигнал с фотоприемника 9 поступает на входы компараторов 2 уровня, входящих в блок 11 цифрового дифферен- .цирования. При увеличении и уменьше- (нии сигнала, поступающего с фотопри- емника 9 относительно нулевого уров- ня, происходит последовательное срабатывание компараторов }S. уровня, на выходе которых формируется парал- лельный код, значение которого связано с амплитудой сигнала, снимаемого с фотоприемника 9. Дешифратор 14 кода, входящий в дешифратор 13, производит преобразование кода, снимаемого с компараторов 1/1 уровня, в дополнительный параллельным код. Сигналы с нулевого и первого разрядов дешифратора 14 кода поступают на входы элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 15. Сигнал с первого выхода дешифратора 14 кода поступает на вход элемента НЕ 16. Сигналы, формируемые на выходах элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 15 и элемента НЕ 16, поступают на вход фазового детектора 17. На выходе фазового детектора 17 формируется логический сигнал, состояние которого определяется знаком производной сигнала, снимаемого с выхода фотоприемника 9. Разрешающая способность определения знака производной определяется дискретностью уровней компарирования копараторов 1/. уровня. Сигналы с нуль
. 5 «
5
органов 10 и фазового детектора 17 поступают на входы элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 18. При совпадении фаз сигналов, снимаемых с выходов нуль-органа 10 и фазового детектора 17, на выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 18 формируется один из логических уровней.
При изменении знака перемещения подвижного элемента 4 относительно неподвижного элемента 5 изменяется знак производной сигнала, снимаемого с фотоприемника 9. При этом изменяется на противоположный логический уровень сигнала, формируемого на выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 18.
Использование устройства позволяет повысить разрешающую способность определения изменения направления перемещения подвижного элемента растрового датчика переменится до доли периода измерительной решетки.
Формула изобретения
на четверть периода решетки, два фотоприемника, нуль-орган, подключенный к первому фотоприемнику, от-, личающееся тем, что, с целью повышения разрешающей способности определения изменения направления перемещения подвижного элемента растрового датчика перемещения, оно снабжено блоком цифрового дифференцирования сигнала, вход которого подключен к второму фотоприемнику элементом ИСКЛЮЧАЮЩЕЕ ИЛИ, входы которого подключены к выходу нуль-органа и выходу блока цифрового дифференцирования сигнала.
А+
тг
w
удрОион мнглз
9ЈbZ$9l
.А/у УЧ
/
//д
%
/7
«п
и с г
wh
Фиг.3
