Изобретение относится к области техники первичных измерительных преобразователей (датчиков), касается способа определения направления вращения и перемещения и устройства для его осуществления, и может быть использовано непосредственно в датчиках, сигнализирующих о направлении перемещения обьектов. в датчиках перемещения угла, датчиках опорных сигналов для обеспечения режима реверса, а также в других областях, например оптико-электронных системах управления и наведения.
Целью изобретения является уменьшение зоны неопределенности информации.
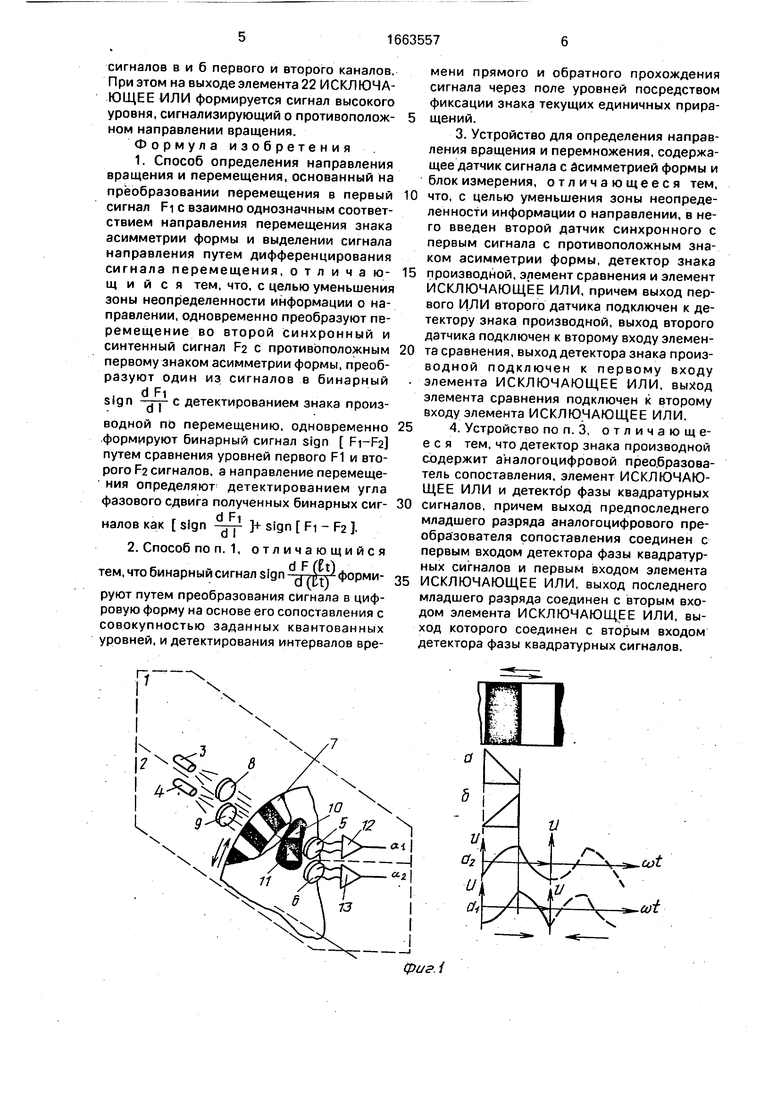
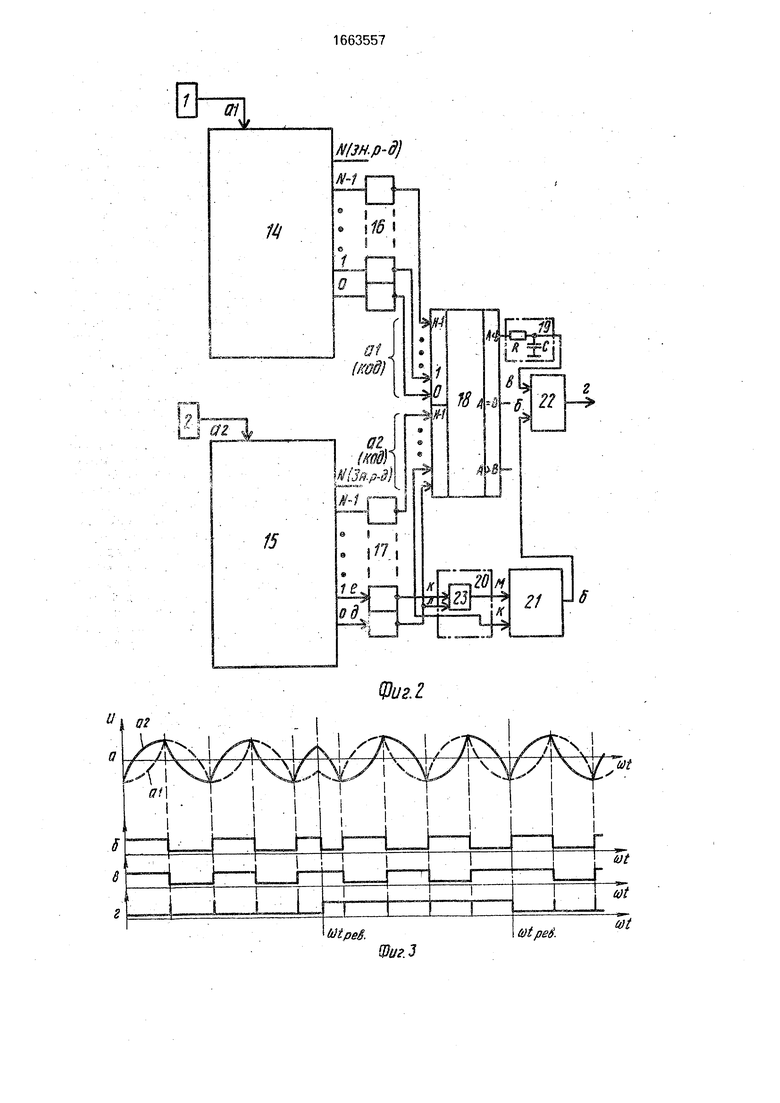
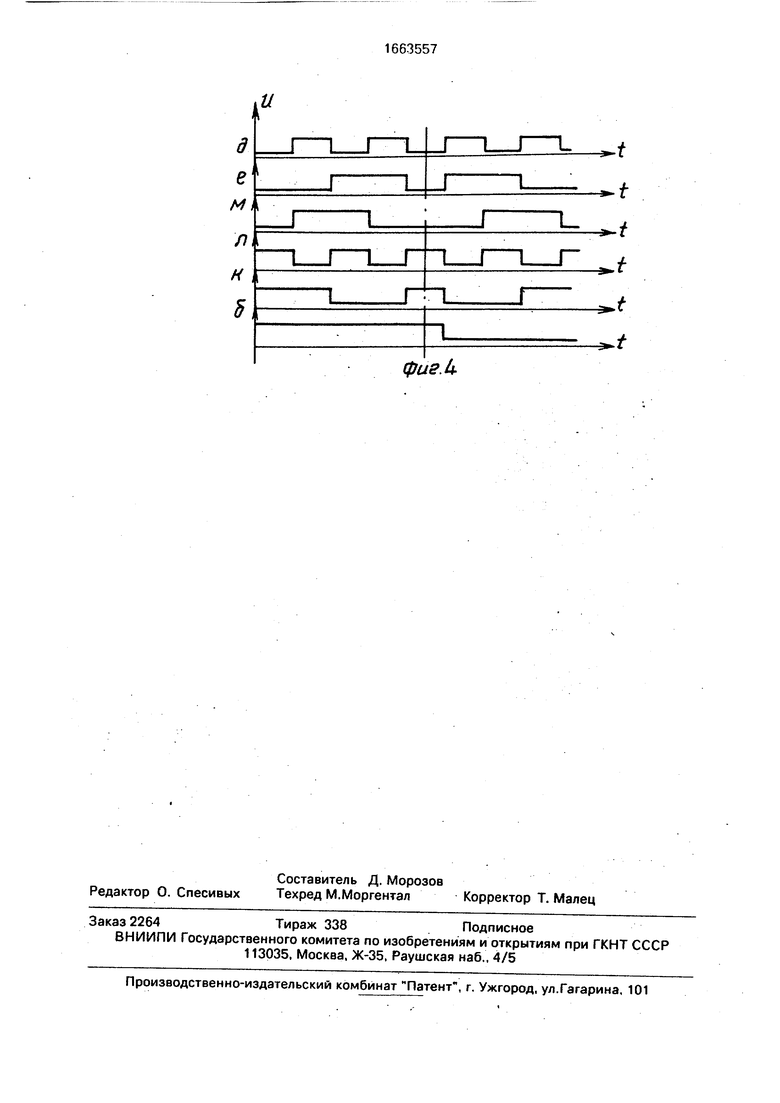
На фиг. 1 представлена блок-схема оптического датчика и временные диаграммы, поясняющие принцип формирования сигналов с асимметрией формы, а также схематический рисунок датчиков первого и второго сигналов; на фиг. 2 - структурная схема устройства для осуществления способа; на фиг. 3, 4 - временные диаграммы работы устройства.
Первый и второй датчики 1, 2 (фиг, 1) содержат излучатели 3, 4, фотоприемники 5, 6 (например, фоторезистор), модулирующий диск 7, конденсаторы 8, 9, асимметричные диафрагмы 10, 11, нормирующие усилители 12, 13 фототока.
Работа датчиков идентична, рассмотрим ее на примере первого датчика. Фотоны излучателя 3 через модулирующие площадки диска 7 равномерно распределяются по рабочей площади диафрагмы 10 и засвечивают рабочую поверхность фотоприемника 5. При вращении модулирующего диска 7 по часовой стрелке формируется оптический модулированный сигнал, который преобразуется фотоприемником 5 в электрический сигнал. Особенности формы диафрагмы 10 переходят вначале на оптический сигнал, затем на электрический. Формируется сигнал с правосторонней асимметрией формы (см. фиг. 1 эпюра ат, сплошная линия). При вращении модулирующего диска 7 против часовой стрелки на выходе фотоприемника 5 формируется сигнал с левосторонней асимметрией формы (фиг. 1, эпюра ai, пунктирная линия). Таким образом, знак асимметрии формы и знаки вторых производных сигнала в нечетных и четных полупериодах однозначно определяются направлением перемещения. Сигнал с выхода фотоприемника усиливается и нормируется по размаху усилителем 12. Для второго датчика, наоборот, при вращении модулирующего диска по часовой стрелке формируется сигнал с левосторонней асимметрией формы (фиг. 1 , эпюра 32, сигнал показан сплошной линией), а при вращении модулирующего диска против часовой стрелки - с правосторонней асимметрией формы (фиг. 1, эпюра за, сигнал показан пунктирной линией).
Устройство (фиг. 2) содержит первый датчик 1 асимметричного сигнала, второй датчик 2 асимметричного сигнала, антисимметричного первому, нетактируемый первый аналого-цифровой преобразователь (АЦП) 14 сопоставления, не тактируемый второй АЦП 15 сопоставления, набор буферных элементов 16 и набор буферных элементов 17 (например, триггеры Шмитта), элемент 18 сравнения, цепь 19, форсирователь 20 квадратурных биимпульсных сигналов, детектор 21 фазы квадратурных сигналов, элемент 22 ИСКЛЮЧАЮЩЕЕ ИЛИ. Способ осуществляется следующим образом.
При вращении модулирующего диска по часовой стрелке датчик 1 преобразует текущий угол ал вращения диска в асимметрич- ный сигнал (фиг. 3, эпюра а1) с
0 правосторонней асимметрией формы. Датчик преобразует угол cut в асимметричный сигнал (фиг. 3, эпюра 32) с левосторонней асимметрией формы, Сигналы 31 и 32 преобразуются в цифровую форму АЦП 14 и АЦП
5 15 сопоставления соответственно и поступают на входы элемента 18 сравнения, где они сравниваются в динамике в реальном времени. На элементы 8 сравнения форми0 руется бинарный сигнал в (см. фиг. 3). Так как применен двоичный дополнительный код и коды сравниваются в динамике, при переключении некоторых состояний возможны кратковременные ситуации ai Э2
5 при действительном ai 32 и наоборот При этом возможно возникновение просечек, для устранения которых служит RC-цепь 19. В первом канале из сигнала 32 формируются двухфазные последовательности импуль0 сов (эпюры м, к, фиг. 4). Сигналы последнего и предпоследнего разрядов АЦП 15 поступают на входы элементов 23 ИСКЛЮЧАЮЩЕЕ ИЛИ формирователя 20 и при Положительном знаке первой производной
5 сигнала 32 сигнал м sign (cos 2 7ft), а сигнал к sign (sin 2 jrt). При этом на выходе детектора 21 фазы квадратурных сигналов формируется сигнал низкого уровня. Таким образом, на выходе детектора 21 фазы квад0 ратурных сигналов формируется бинарный сигнал (эпюра б, фиг. 4) с переключением уровней в моменты изменения знака и первой производной сигнала 32. Бинарный сигнал в первого канала и бинарный сигнал б
5 второго канала (фиг. 3) поступают на входы элемента 22 ИСКЛЮЧАЮЩЕЕ ИЛИ, где они оцениваются на совпадение и антисовпадение. При вращении модулирующего диска пояасовой стрелке сигналы б и в совпадают
0 и на выходе элемента 22 ИСКЛЮЧАЮЩЕЕ ИЛИ формируется сигнал низкого уровня, сигнализирующий о направлении врзщения диска, При вращении модулирующего диска против часовой стрелки датчик преобразует
5 угол О) t в асимметричный сигнал с левосторонней асимметрией формы, датчик 1 в сигнал в правосторонней асимметрией формы. Так как при этом сочетание знаков первых и вторых производных сигналов изменяются, обнаруживается антисовпадение бинарных
сигналов в и б первого и второго каналов. При этом на выходе элемента 22 ИСКЛ ЮЧА- ЮЩЕЕ ИЛИ формируется сигнал высокого уровня, сигнализирующий о противоположном направлении вращения.
Формула изобретения 1. Способ определения направления вращения и перемещения, основанный на преобразовании перемещения в первый сигнал FI с взаимно однозначным соответствием направления перемещения знака асимметрии формы и выделении сигнала направления путем дифференцирования сигнала перемещения, отличающийся тем, что, с целью уменьшения зоны неопределенности информации о направлении, одновременно преобразуют перемещение во второй синхронный и синтенный сигнал Рг с противоположным первому знаком асимметрии формы, преобразуют один из сигналов в бинарный
sign ту- с детектированием знака производной по перемещению, одновременно формируют бинарный сигнал sign путем сравнения уровней первого F1 и второго F2 сигналов, а направление перемещения определяют детектированием угла фазового сдвига полученных бинарных сигналов как sign
dFi
dl 2. Способ поп. 1,
+ sign Fi - F2 .
отличающийся d F jtt)
тем, что бинарный сигнал sign Щ) формируют путем преобразования сигнала в цифровую форму на основе его сопоставления с совокупностью заданных квантованных уровней, и детектирования интервалов времени прямого и обратного прохождения сигнала через поле уровней посредством фиксации знака текущих единичных приращений.
3. Устройство для определения направления вращения и перемножения, содержащее датчик сигнала с асимметрией формы и блок измерения, отличающееся тем,
что, с целью уменьшения зоны неопределенности информации о направлении, в него введен второй датчик синхронного с первым сигнала с противоположным знаком асимметрии формы, детектор знака
производной, элемент сравнения и элемент ИСКЛЮЧАЮЩЕЕ ИЛИ, причем выход первого ИЛИ второго датчика подключен к детектору знака производной, выход второго датчика подключен к второму входу элемента сравнения, выход детектора знака производной подключен к первому входу
элемента ИСКЛЮЧАЮЩЕЕ ИЛИ. выход
элемента сравнения подключен к второму
входу элемента ИСКЛЮЧАЮЩЕЕ ИЛИ.
4. Устройство по п. 3, отличающееся тем, что детектор знака производной содержит аналогоцифровой преобразователь сопоставления, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ и детектбр фазы квадратурных
сигналов, причем выход предпоследнего младшего разряда аналогоцифрового преобразователя сопоставления соединен с первым входом детектора фазы квадратурных сигналов и первым входом элемента
ИСКЛЮЧАЮЩЕЕ ИЛИ, выход последнего младшего разряда соединен с вторым входом элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, выход которого соединен с вторым входом детектора фазы квадратурных сигналов.
Изобретение относится к технике первичных измерительных преобразователей, может быть использовано в датчиковой аппаратуре для определения направления углового и линейного перемещения, в датчиках перемещения угла, опорных сигналов для обеспечения режима реверса, а также в оптико-электронных системах управления и наведения. Цель - уменьшение зоны неопределенности информации о направлении. Это достигается использованием двух синхронных и синтонных сигналов с асимметрией формы, знаки которой взаимнооднозначно соответствуют направлению перемещения и противоположны. Способ заключается в преобразовании перемещения в первый сигнал F1 и синхронный и синтонный с ним второй сигнал F2 с противоположными знаками асимметрии формы, формировании в первом канале сигнала SIGNFЪ с переключением уровней в моменты изменения знака первой производной, а во втором канале сигнала SIGN[F1 - F2] с переключением уровней при изменении сочетания знаков вторых производных первого и второго сигналов и отделении направления перемещения как (SIGNFЪ) + [SIGN(F1 - F2)]. Устройство для определения направления вращения и перемещения содержит первый и второй фотодатчики-формирователи сигналов F1 и F2 с противоположными знаками асимметрии формы, формирователь бинарного сигнала SIGNFЪ, формирователь бинарного сигнала SIGN(F1 - F2) и элемент ИСКЛЮЧАЮЩЕЕ ИЛИ. Формирователь сигнала SIGNFЪ выполнен в виде последовательно соединенных нетактируемого АЦП сопоставления, формирователя квадратурных биимпульсных сигналов и детектора фазы квадратурных сигналов. Формирователь бинарного сигнала SIGN(F1 - F2) выполнен в виде двух нетактируемых АЦП сопоставления, выходы которых соединены с входами компаратора кодов. 2 с. и 2 з.п. ф-лы, 4 ил.
фиг i
м
LJ tn
15
titpeS
Фиг. г
Шиг.З
(t)tpe$
фие.Ь
| Измерительный преобразователь величины и скорости линейного перемещения объекта | 1984 |
|
SU1228018A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
