(5t)5 G 01 G 7/04,


| название | год | авторы | номер документа |
|---|---|---|---|
| Большегрузные автоматические весы | 1990 |
|
SU1779948A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2105270C1 |
| Большегрузные автоматические весы | 1984 |
|
SU1283539A1 |
| Большегрузные весы | 1981 |
|
SU994923A1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ФОРСУНОК | 1991 |
|
RU2022662C1 |
| Большегрузные пьезоэлектрические весы | 1984 |
|
SU1339408A1 |
| Большегрузные автоматические весы | 1986 |
|
SU1566221A1 |
| Автоматические большегрузные весы | 1979 |
|
SU775627A1 |
| Автоматические большегрузные весы | 1984 |
|
SU1200132A1 |
| Прецизионные большегрузные стационарные весы | 1978 |
|
SU748139A1 |

ГОСУДАРСТВЕННОЕ ПАТЕНТНОЕ ВЕДОМСТВО СССР (ГОСПАТЕНТ СССР)
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
1
(21)4880709/10
(22) 11.11.90
(46)07.12.92. Бюл. №45
(75) А.Я.Шенфельд, В.А.Кандрикина
и Л.М.Рюмина
(56)Авторское свидетельство СССР N2 1283539, кл. G 01 G 7/04, 1984.
Авторское свидетельство СССР № 1339408, кл. G 01 G 7/04, 1984.
Авторское свидетельство СССР № 1490497, кл. G 01 G 7/04, 1987. (54) БОЛЬШЕГРУЗНЫЕ АВТОМАТИЧЕСКИЕ ВЕСЫ
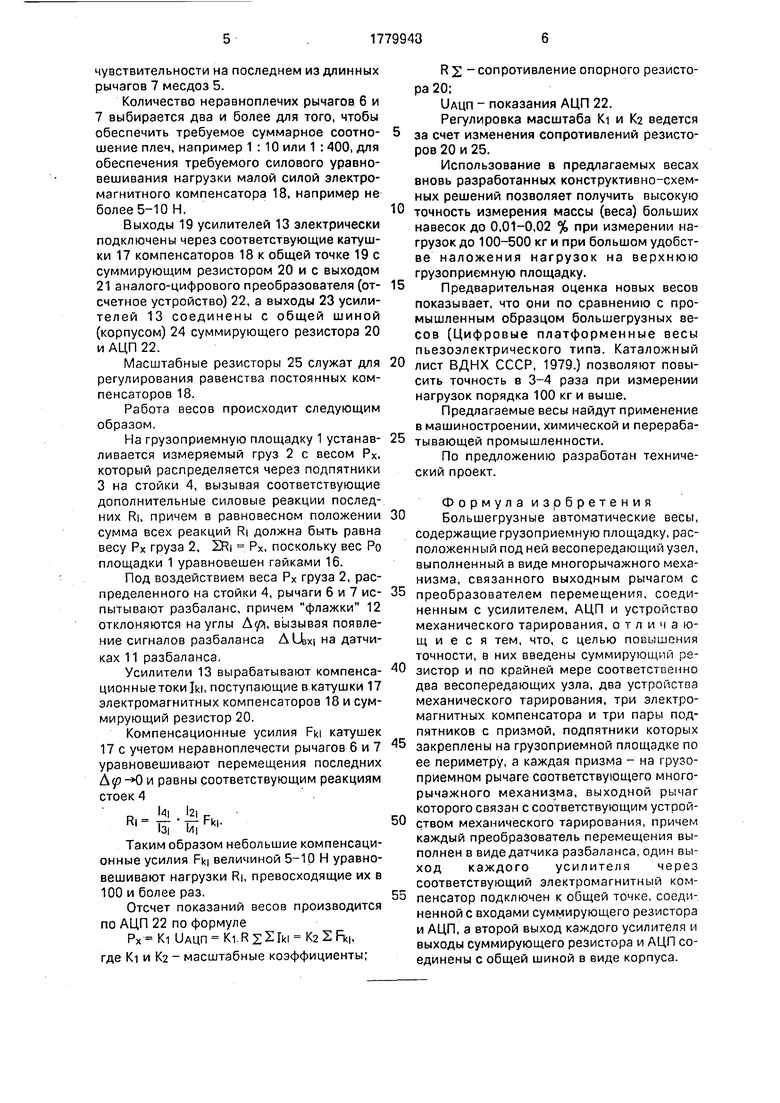
(57)Использование: весоизмерительная техника. Сущность изобретения: вес груза через три пары: подпятник 3 с призмой 4, соединенной с соответствующим грузопри- емным рычагом 6 многорычажной системы, передается ее выходному рычагу 7 с преоб.
разователем перемещения, выполненным в виде датчика 11 разбаланса. Чувствительный элемент-флажок 12 каждого датчика разбаланса отклоняется, вызывая появление сигнала разбаланса, поступающего через соответствующие усилители 13, вырабатывающие компенсационные токи, в катушки 17 электромагнитных компенсаторов 18, уравновешивающих перемещение грузоприемных и выходных рычагов б и 7 соответственно. Отсчет показаний осуществляется по АЦП 22, подключенному первым входом к общей точке 19, соединенной с выходами электромагнитных компенсаторов и входом суммирующего резистора 20. Второй выход каждого усилителя 13 и выходы суммирующего резистора 20 и АЦП 22 соединены с общей шиной в виде корпуса. 1 ил.
acrKxOSi
Изобретение относится к весоизмерительной технике, в частности к точным большегрузным весам с автоматическим электросиловым уравновешиванием с нагрузками порядка 100-1000 кг.
Известны большегрузные атоматиче- ские весы, содержащие грузоприемную площадку, подвеску, измерительное коромысло, гиревой механизм, систему уравновешивания, основание и отсчетное устройство 1.
Известные весы обладают недостаточной нагрузочной способностью, поскольку подвеска с грузоприемной чашкой могут получать перекосы при нецентральном наложении измеряемых нагрузок предельной массы.
Известны большегрузные весы, содержащие грузоприемную площадку, измерительную систему в виде пьезоэлектрических месдоз, отсчетное устройство и основание
Известные весы имеют большую нагрузочную способность, однако их точность недостаточна из-за погрешностей пьезоэлектрических месдоз (утечек зарядов, повышенных давлений в точках контакта с пьезокристаллами и т. д.).
Наиболее близким по технической сущности являются большегрузные автоматические весы, содержащие грузоприемную площадку, измерительную систему, отсчетное устройство и основание 3.
Известные весы при большой нагрузочной способности обладают недостаточной точностью, определяемой предельной точностью последнего измерительного преобразователя типа пьезокристалла (не выше 0,05-0.1 %).
Вследствие этого весы не могут использоваться при точном измерении массы больших навесок, например полудрагоценных и драгоценных металлов, дорогостоящих радиоактивных компонентов и пр., где требуется повысить результирующую точность до 0,01-0,02 %.
Все это вместе взятое приводит к снижению достоверности стоимостной оценки сырья и материалов.
Целью предлагаемых большегрузных автоматических весов является повышение точности измерения массы больших навесок.
Поставленная цель достигается тем, что весы, содержащие грузоприемную площадку, измерительную систему, отсчетное устройство и основание, снабжены тремя и более многорычажными уравновешивающими месдозами с подпятниками, установленными под грузоприемной площадкой по
0
5
0
периметру последней, причем каждая из указанных месдоз снабжена независимой системой автоматического силового уравновешивания с датчиком разбаланса,усилителем, электромагнитным компенсатором и устройством механического тарирования, размещенными на последнем из длинных рычагов месдоз, причем выходы всех усилителей подключены с одной стороны через соответствующие компенсаторы к общей точке с суммирующим резистором и с выходом аналого-цифрового преобразователя, а с другой стороны соединены с их общей шиной в виде корпуса.
Указанная совокупность ограничительных и отличительных признаков в заявляемых весах в патентно-технической литературе неизвестна. Она обладает существенной новизной и, как пояснено выше, обладает значительной технико-экономической полезностью.
Новая совокупность признаков большегрузных весов позволяет получить весы с погрешностью ± (10-200) г для нагрузки 100-500 кг и больше, обладающих цифровой индикацией и выходом на ЭВМ.
На чертеже представлена конструктив- нал схема предлагаемых весов.
Весы содержат грузоприемную площадку 1, например форме круга для измеряемого груза 2, снабженную подпятниками 3, размещенными под площадкой 1 по ее периметру.
Для создания устойчивости площадки 1 5 при помещении на нее груза 2 количество подпятников 3 выбирается три и более.
В подпятники 3 упираются стойки 4 многорычажных уравновешивающих месдоз 5, содержащих неравноплечие рычаги 6 и 7, и Ц з| например, с соотношением плеч 1:10, опорные устройства 3 и 9, шарнирныесвязи 10, датчики 11 разбаланса с флажками 12 и усилителями 13, устройствами механического тарирования,напри- 5 мер,пружинами 14, гайками 15 и 16 центра тяжести и начальной балансировки и катушки 17 электромагнитных компенсаторов 18. В исходном (ненагруженном) состоянии грузоприемной площадки 1 вес Ро последней уравновешен с помощью перемещаемых гаек 16 начальной балансировки, а также устройств 14 механического тарирования таким образом, что флажки 12 находятся в ненаклонном состоянии 0, а выход- 5 ные сигналы DI усилителей 13 равны нулю .
Флажки 12, устройства 14 механического тарирования и катушки 17 компенсаторов 18 размещены для увеличения
5
0
0
0
чувствительности на последнем из длинных рычагов 7 месдоз 5.
Количество неравноплечих рычагов 6 и 7 выбирается два и более для того, чтобы обеспечить требуемое суммарное соотношение плеч, например 1:10 или 1 : 400, для обеспечения требуемого силового уравновешивания нагрузки малой силой электромагнитного компенсатора 18. например не более 5-10 Н.
Выходы 19 усилителей 13 электрически подключены через соответствующие катушки 17 компенсаторов 18 к общей точке 19 с суммирующим резистором 20 и с выходом 21 аналого-цифрового преобразователя (от- счетное устройство) 22, а выходы 23 усилителей 13 соединены с общей шиной (корпусом) 24 суммирующего резистора 20 и АЦП 22.
Масштабные резисторы 25 служат для регулирования равенства постоянных компенсаторов 18.
Работа весов происходит следующим образом.
На грузоприемную площадку 1 устанавливается измеряемый груз 2 с весом Рх, который распределяется через подпятники 3 на стойки 4, вызывая соответствующие дополнительные силовые реакции последних RI, причем в равновесном положении сумма всех реакций RI должна быть равна весу Рх груза 2, ZRi Рх, поскольку вес Ро площадки 1 уравновешен гайками 16.
Под воздействием веса Рх груза 2, распределенного на стойки 4, рычаги 6 и 7 испытывают разбаланс, причем флажки 12 отклоняются на углы Ду}, вызывая появление сигналов разбаланса AUbq на датчиках 11 разбаланса.
Усилители 13 вырабатывают компенса- ционныетоки1| |, поступающие в катушки 17 электромагнитных компенсаторов 18 и суммирующий резистор 20.
Компенсационные усилия Fki катушек 17 с учетом неравноплечести рычагов 6 и 7 уравновешивают перемещения последних и равны соответствующим реакциям стоек 4
RI
1 1 Ft, 1з, Mi ki
Таким образом небольшие компенсационные усилия Fk| величиной 5-10 Н уравновешивают нагрузки RI, превосходящие их в 100 и более раз.
Отсчет показаний весов производится по АЦП 22 по формуле
Px Ki UAun Ki R22lki K22Fk|, где Ki и Ка - масштабные коэффициенты;
R 2 - сопротивление опорного резистора 20;
U АЦП - показания АЦП 22.
Регулировка масштаба Ki и Ка ведется за счет изменения сопротивлений резисторов 20 и 25.
Использование в предлагаемых весах вновь разработанных конструктивно-схемных решений позволяет получить высокую точность измерения массы (веса) больших навесок до 0,01-0,02 % при измерении нагрузок до 100-500 кг и при большом удобстве наложения нагрузок на верхнюю грузоприемную площадку. Предварительная оценка новых весов показывает, что они по сравнению с промышленным образцом большегрузных весов (Цифровые платформенные весы пьезоэлектрического типа. Каталожный лист ВДНХ СССР, 1979.) позволяют повысить точность в 3-4 раза при измерении нагрузок порядка 100 кг и выше.
Предлагаемые весы найдут применение в машиностроении, химической и перераба- тывающей промышленности.
По предложению разработан технический проект.
Формула изрбретения
Большегрузные автоматические весы, содержащие грузоприемную площадку, расположенный под ней весопередающий узел, выполненный в виде многорычажного механизма, связанного выходным рычагом с
преобразователем перемещения, соединенным с усилителем, АЦП и устройство механического тарирования, отличающиеся тем, что, с целью повышения точности, в них введены суммирующий резистор и по крайней мере соответственно два весопередающих узла, два устройства механического тарирования, три электромагнитных компенсатора и три пары подпятников с призмой, подпятники которых
закреплены на грузоприемной площадке по ее периметру, а каждая призма - на грузо- приемном рычаге соответствующего многорычажного механизма, выходной рычаг которого связан с соответствующим устоойством механического тарирования, причем каждый преобразователь перемещения выполнен в виде датчика разбаланса, один выход каждого усилителя через соответствующий электромагнитный компенсатор подключен к общей точке, соединенной с входами суммирующего резистора и АЦП, а второй выход каждого усилителя и выходы суммирующего резистора и АЦП соединены с общей шиной в виде корпуса.
Составитель А. Шенфельд Редактор С. КулаковаТехред М.МоргенталКорректор А. Козориз
Заказ 4430ТиражПодписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб.. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул.Гагарина, 101
Date : 31/05/2001
Number of pages : 6
Previous document : SU 1779948A1
Next document : SU 1779950A1
СОЮЗ СОВЕТСКИХ
СОЦИАЛИСТИЧЕСКИХ
РЕСПУБЛИК
ГОСУДАРСТВЕННОЕ ПАТЕНТНОЕ ВЕДОМСТВО СССР (ГОСПАТЕНТ СССР)
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
1
(21)4785111/28 (22)22.01.90 (46)07.12.92. Бюл. №45
(71)Научно-исследовательский, проектно- конструкторский и технологический кабельный институт
(72)С.А.Ткалич, В.Д.Шиянов и Л А Бахмуто- ва
(56) 1. Авторское свидетельство СССР № 177666,1964.
З.Авторское свидетельство СССР № 1126834, 1983,G 01 N 3/08
7,Авторское свидетельство СССР № 1453577,1989.
(19)
5U«n, 1779949 А1
(5i)5 G 01 Н 17/UQ
/
Ј
(54) УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ГИБКИХ КАБЕЛЕЙ НА МНОГОКРАТНЫЕ ПЕРЕМОТКИ
(57) Изобретение относится к испытательной технике, а именно к устройствам для испытания изделий (кабели, провода, шнуры, канаты, жгуты и т. д.) на многократные перемотки, и может найти применение в электротехнической промышленности. Цель изобретения состоит в повышении достоверности испытаний путем расширения диапазона углов закручивания за счет регулирования нейтрали колебаний с возможностью стабилизации нейтрали в любом из заданных положений. Устройство содержит блок управления, состоящий из асинхронного двигатепч 1 с обмотками возЬ денил 2 и управления 3, подключенными к i сточ- ником переменного тока 4 и 5 члс.о f; f соответственно, датчик полохениг 5, Формирователь сигналов 7, ревезсивну
N, IV,
л д
14}
-
чик импульсов 8, одновибратор 9, цифровое устройство выборки - хранения (ЦУВХ) 10, цифроанзлоговый преобразователь 11, регулятор положения 12, устройство сравнения 13, выпрямитель 14, компаратор 15,
Изобретение относится к испытательной технике, а именно к устройствам для испытания кабельных изделий (кабели, провода, шнуры, канаты, жгуты и т. д.) на многократные перемотки, и может найти применение в электротехнической промышленности.
Изобретение решает задачу улучшения качества испытаний кабельных изделий.
Известны устройства 1, 2 и 3 для испытания кабельных изделий на многократные перегибы, состоящие из дух шкивов для перегиба изделия, натяжного механизма. Циклическое вращение шкивов осуществляется от двигателя посредством кинематической схемы перемещения.
Устройство 1 и 2 не позволяет осуществлять двухстороннюю деформацию при перегибе изделия, где участки кабельного изделия за один цикл перемотки претерпевают деформацию как сжатия, так и растяжения. Кроме тбго, при такой системе перемещения ограничивается диапазон угла вращения. Все эти недостатки не дают возможности испытать изделия в условиях, имитирующих условия эксплуатации.
Известен вибрационный электропривод со стабилизацией амплитуды колебаний вала двигателя 4. Однако такое устройство является разомкнутой системой регулировки, не имеет датчика положения и, следовательно, не может осуществлять стабилизацию нейтрального положения вала (нейтрали колебаний). Кроме того, устройство не предназначено для работы в диапазоне частот колебаний, характерных для процесса испытания гибких изделий, т. е. в области инфранизких частот.
Известно также устройство для управления двухфазным асинхронным двигателем в режиме колебательного движения преимущественно инфранизких частот 5. Однако подобное устройство является также розомкнутым по положению и не позволяет регулировать и стабилизировать нейтраль колебаний.
Известно устройство с электроприводом колебательного движения, содержащее двухобмоточный асинхронный двигатель, фазовращатель, источник переменного тока, регулятор амплитуды тока, блок смещеамплитудный регулятор 16, задающий генератор 17, коммутатор 18, исполнительный механизм для сматываниями наматывания кабельного изделия 19. 3 ил.
ния нейтрали и датчик направления вращения, соединенный через блок смещения нейтрали с управляющим входом регулятора амплитуды тока, вход которого подключен к выходу фазовращателя, выход - к обмотке управления двигателя 6.
Недостатками такого устройства являются, во-первых, невысокая точность регулирования скорости,смещения нейтрали
колебаний из-за отсутствия информации о положении ротора в любой момент времени, поскольку имеющийся в устройстве датчик обратной связи формирует лишь сигнал направления вращения вала электродвигателя; во-вторых: невысокая точность стабилизации нейтрали колебаний по тем же причинам. В результате подобное устройство не позволяет в широком диапазоне регу- лировать нейтраль колебаний с
возможностью стабилизации нейтрали в любом из заданных положений. Это существенно ухудшает эксплуатационные характе- ристики привода, вызывающего разностороннее движение барабанов,
предназначенных для сматывания и наматывания гибкого кабеля и не позволяет осуществлять вращения барабанов с большой точностью в широком диапазоне углов закручивания.
Наиболее близким по технической сущности является прибор для испытания гибких малогабаритных кабелей на устойчивость к многократным перемоткам 7, состоящий из блока управления, кинематически связанного с приводом главного движения через шестерни, где от электродвигателя вращения передается на две чер- вячные передачи правого и левого исполнения, чем обеспечивается разностороннее вращение двух осей, на которые надеваются съемные барабаны для сматывания кабеля с одного из них на другой под действием растягивающей нагрузки.
Недостатком такого прибора заключается в том, что наличие в электрической схеме блока управления электромагнитных реле и пускателей снижает надежность работы установки из-за малого ресурса этих элементов. Кроме того, реверсирование
двигателя с помощью магнитных пускателей приводит к большим динамическим нагрузкам в момент его пуска, что сказывается на качестве испытаний и приводит к быстрому износу деталей. Отсутствие возможности стабилизации вращения барабанов в процессе реверсирования двигателя не позволяет проводить многократную перемотку кабельных изделий в широком диапазоне углов закручивания барабанов.
Целью изобретения является повышение достоверности испытаний путем расширения диапазона углов закручивания.
Поставленная цель достигается тем, что блок управления выполнен в виде последовательно соединенных формирователя сигналов, реверсивного счетчика импульсов, цифрового блока выборки хранения, цифро- аналогового преобразователя, блока сравнения компаратора, амплитудного регулятора и задающего генератора, регулятора положения, выход которого соединен со вторым входом блока сравнения, одновибратора, вход которого подключен к управляющему выходу формирователя сигналов и к управляющему входу реверсивного счетчика импульсов, а выход - к стробирующему входу цифрового блока выборки-хранения коммутатора, выход которого соединен с,входом предварительной установки реверсивного счетчика импульсов, а вход - с шиной нулевого потенциала, выпрямителя, вход которого соединен с выходом блока сравнения и со входом компаратора, а выход - с управляющим входом амплитудного регулятора, информационный вход которого соединен с выходом задающего генератора, а выход с управляющим входом амплитудного регулятора, информационный вход которого соединен с выходом задающего генератора, а выход-с управляющим входом электродвигателя, разрешающий вход амплитудного регулятора соединен с входом одновибратора и с управляющим выходом формирователя сигналов.
По сравнению с наиболее близким аналогичным техническим решением, заявляемое техническое решение имеет следующие отличительные признаки:
блок управления выполнен в виде последовательно соединенных формирователя сигналов, реверсивного счетчика импульсов, цифрового блока преобразователя, блока сравнения компаратора, амплитудного регулятора и задающего генератора, регулятора положения, выход которого соединен со вторым входом блока сравнения, одновибратора, вход которого подключен к управляющему выходу формирователя сигналов и к управляющему входу реверсивного счетчика импульсов, а выход
- стробирующему входу цифрового блока выборки-хранения коммутатора, выход которого соединен со входом предваритель- 5 ной установки реверсивного счетчика импульсов, а вход-с шиной нулевого потенциала, выпрямителя, вход которого соединен с выходом блока сравнения и со входом компаратора, а выход-с управляющим вхо0 дом амплитудного регулятора, информационный вход которого соединен с выходом задающего генератора, а выход с управляющим входом электродвигателя, разрешающий вход амплитудного регулятора
5 соединен с входом одновибратора и с управляющим выходом формирователя сигналов.
Следовательно,заявляемое техническое решение соответствует критерию новиз0 на.
При реализации изобретения достигается расширение диапазона угла закручивания за счет регулирования нейтрали колебаний с возможностью стабилизации
5 нейтрали в любом из заданных положений, При реализации изобретения расширяются функциональные возможности устройства за счет возможности устройства обеспечить образцу кабельного изделия
0 при испытании на перемотки на вращающихся барабанах различные углы его закручивания, точную и удобную их регулировку путем стабилизации и регулирования нейтрали колебаний исполнительного двигателя
5 в любом из заданных положений.
По сравнению с эффектом прототипа, получен новый эффект, благодаря тому, что блок управления устройства выполнен в виде формирователя сигналов, обрабатываю0 щий сигналы датчика положения, расположенного на валу электродвигателя и вырабатывающий импульсы заданной длительности для реверсивного счетчика импульсов прямого и обратного хода рабочего
5 органа, а также сигнал направления вращения вала двигателя sing Ј; однивибратора, срабатывающего по фронту сигнала sign | и управляющий работой цифрового блока выборки-хранения, передающий информа0 Цию на вход цифроаналогового преобразователя (ЦАП); блока сравнения компаратора, на один вход которого подается с ЦАП информация о положении рабочего органа, а на другой вход поступает сигнал с
5 регулятора положения и формирующее сигнал рассогласования; компаратора и выпря: мителя, управляющие работой амплитудного регулятора; задающего генератора, коэффициент передачи синусоидального напряжения которого изменяется посредством регулятора в сторону умень
