1
(21)4498243/25-28
(22)25.10.88
(46) 23.06.91. Бюл. К 23 (72) В.Г.Рудаков, Н.А„Кириллов, А.Б.Блинов, В.Л.Лазарев, С.П„Шадрин и С.Э.Цимерииг
(53)620.1.05:531.382(088.8)
(56)Авторское свидетельство СССР № 832375, кл. G 01 И 1/12, 1979.
(54)БАЛАНСИРУЮЩЕЕ УСТРОЙСТВО
(57)Изобретение относится к балансировочной технике и может быть использовано для определения статической неуравновешенности и центра тяжести изделий в машиностроении, приборостроении и т.д. Целью изобретения является повышение точности балансировки. Балансируемое изделие 3 устанавливают на предварительно отбалансированную с помощью грузов 17 платформу 1, При наличии неуравновешенности
платформа 1 поворачивается относительно чувствительной оси ОХ, что приводит к поятению сигнала в датчике 4 поворота, сигнал с которого через блок 16 управления поступает на привод, который перемещает каретку 7 с клиновидной рейкой 8 по направляющим 11, располояенпым на платформе 1 перпендикулярно оси чувствительности ОХ. При движении каретки меняется положение центра масс механизма 5 компенсации, что приводит к повороту платформы 1, пока она не уравновесится. Одновременно происходит перемещение подвижной части фотоэлектрического датчика fi в вертикальной плоскости, исключив при этом возникновение каких-либо дополнительных моментов относительно оси ОХ. Информация с фотоэлектрического датчика 6 регистрируется па индикаторе 15. 4 ил.
I
сз
&
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Балансированное устройство | 1979 |
|
SU832375A1 |
| Стенд для балансировки изделий | 1979 |
|
SU862012A1 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| Устройство для уравновешивания изделий | 1978 |
|
SU763711A1 |
| Устройство для определения центра тяжести изделий | 1975 |
|
SU567107A1 |
| Устройство для поворота кольцевого сердечника при намотке | 1981 |
|
SU983774A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И ФАЗЫ ДИСБАЛАНСА | 2006 |
|
RU2310178C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КАРДАННЫХ ПЕРЕДАЧ | 2002 |
|
RU2225603C2 |
| Балансировочный станок | 1983 |
|
SU1144015A1 |
| Устройство для измерения моментов инерции изделий | 1981 |
|
SU983475A1 |

Изобретение относится к балансировочной технике и может быть использовано для определения статической неуравновешенности и центра тяжести изделий в маииностроении,приборостроении и т.д.
Целью изобретения является повышение точности измерений за счет исключения погрешностей, обусловленных перемещением подвижных элементов фотоэлектрического датчика линейных перемещений относительно оси поворота платформы.
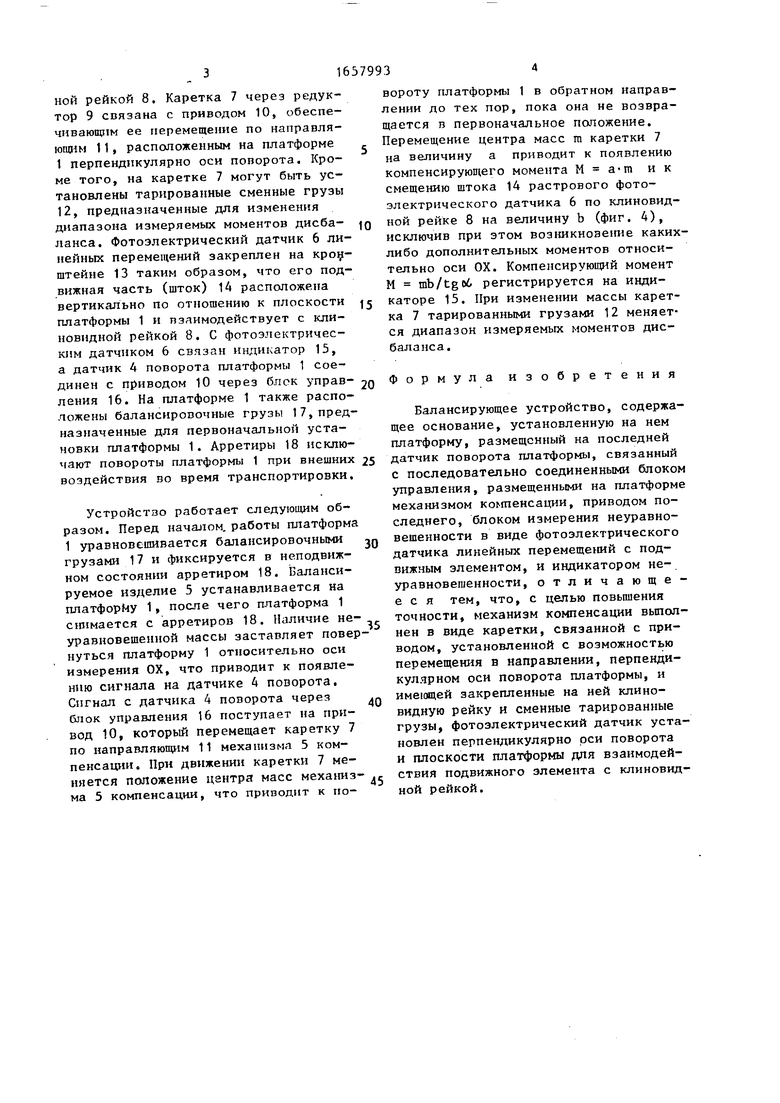
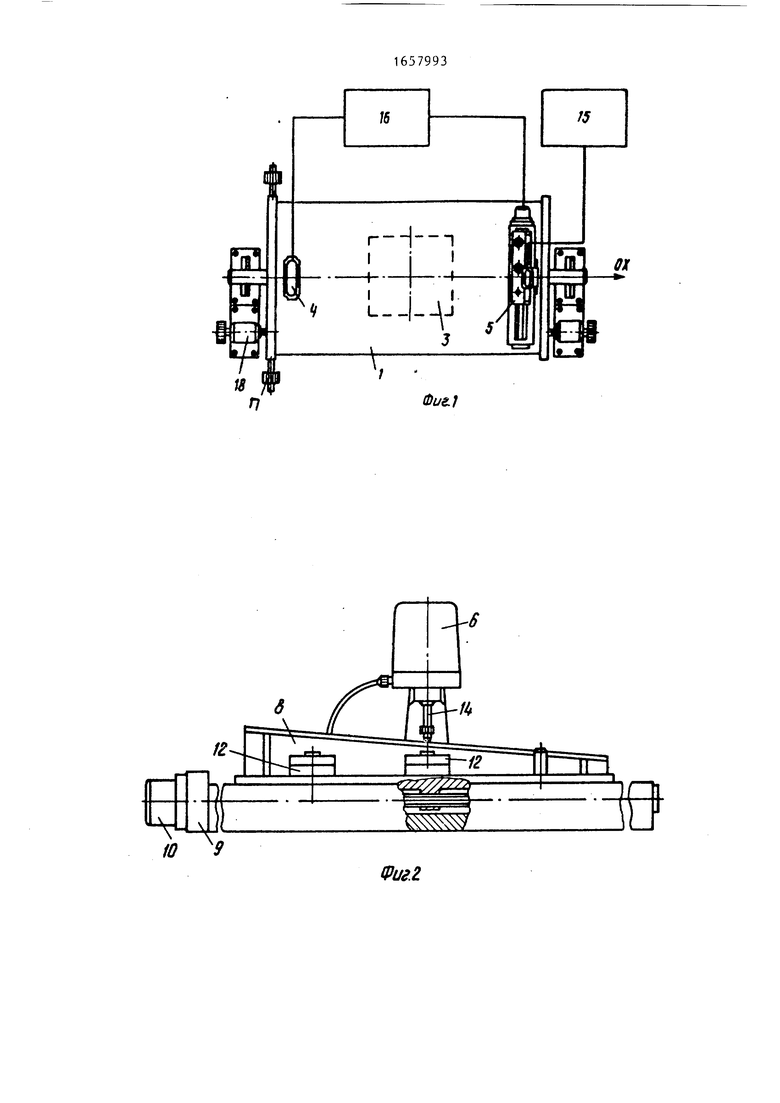
На фиг.1 изображено устройство, общий вид; на фиг.2 - механизм компенсации и фотоэлектрический датчик линейных перемещений; на фиг. 3 - то же, вид сбоку; на фиг. 4 - схема для определения компенсирующего момента. Балансирующее устройство содержит платформу 1, установленную на основании (не показано) на ножевых опорах 2. На платформе 1 установлено балансируемое изделие 3, датчик 4 поворота платформы 1, механизм 5 компенсации, блок измерения неуравновешенности, выполненный в виде фотоэлектрического датчика 6 линейных перемещений. Механизм 5 компенсации выполнен в виде каретки 7 с клинлвидоэ
СП
со со
с/о
ной рейкой 8. Каретка 7 через редуктор 9 связана с приводом 10, обеспечивающим ее перемещение по направляющим 11, расположенным на платформе 1 перпендикулярно оси поворота. Кроме того, на каретке 7 могут быть установлены тарированные сменные грузы 12, предназначенные для изменения диапазона измеряемых моментов дисба- ланса. Фотоэлектрический датчик 6 линейных перемещений закреплен на кронштейне 13 таким образом, что его подвижная часть (шток) 14 расположена вертикально по отношению к плоскости платформы 1 и взаимодействует с клиновидной рейкой 8. С фотоэлектрическим датчиком 6 связан индикатор 15, а датчик 4 поворота платформы 1 соединен с приводом 10 через блок управ- ления 16. На платформе 1 также расположены балансировочные грузы 17, предназначенные для первоначальной установки платформы 1. Арретиры 18 исключают повороты платформы 1 при внешних воздействия во время транспортировки.
Устройство работает следующим образом. Перед началом, работы платформа 1 уравновешивается балансировочными грузами 17 и фиксируется в неподвижном состоянии арретиром 18. Балансируемое изделие 5 устанавливается на платформу 1, после чего платформа 1 снимается с арретиров 18. Наличие неуравновешенной массы заставляет повернуться платформу 1 относительно оси измерения ОХ, что приводит к появлению сигнала на датчике 4 поворота. Сигнал с датчика 4 поворота через блок управления 16 поступает на привод 10, который перемещает каретку 7 по направляющим 11 механизма 5 компенсации. При движении каретки 7 меняется положение центра масс механиз- ма 5 компенсации, что приводит к по
. Q $ п
д Q
5
вороту платформы 1 в обратном направлении до тех пор, пока она не возвращается в первоначальное положение. Перемещение центра масс га каретки 7 на величину а приводит к появлению компенсирующего момента М а-го и к смещению штока 14 растрового фотоэлектрического датчика 6 по клиновидной рейке 8 на величину b (фиг. 4), исключив при этом возникновение каких- либо дополнительных моментов относительно оси ОХ. Компенсирующий момент М mb/tg&6 регистрируется на индикаторе 15. При изменении массы каретка 7 тарированными грузами 12 меняется диапазон измеряемых моментов дисбаланса.
Формула изобретения
Балансирующее устройство, содержащее основание, установленную на нем платформу, размещенный на последней датчик поворота платформы, связанный с последовательно соединенными блоком управления, размещенными на платформе механизмом компенсации, приводом последнего, блоком измерения неуравновешенности в виде фотоэлектрического датчика линейных перемещений с подвижным элементом, и индикатором неуравновешенности, отличающееся тем, что, с целью повышения точности, механизм компенсации выполнен в виде каретки, связанной с приводом, установленной с возможностью перемещения в направлении, перпендикулярном оси поворота платформы, и имеющей закрепленные на ней клиновидную рейку и сменные тарированные грузы, фотоэлектрический датчик установлен перпендикулярно оси поворота и плоскости платформы для взаимодействия подвижного элемента с клиновидной рейкой.
Фиг.}
Фиг2
/
Фие.З
8
