1
Изобретение относится к области технологии приборостроения и машиностроения и может быть использовано во всех отраслях народного хозяйства, г где требуется высокочастотная балансировка вращающихся деталей и механизмов.
Известно устройство для статической балансировки роторов, содержа- |Q щее основание, установленные на основании опору в виде газостатического подшипника, измерительный узел, рамку, связанную с опорой, для размещения в ней балансируемого ротора, средства контроля положения ротора {YJ/
Устройство применяется для статического уравновешивания роторов, .имеющих конструктивную ось вращения, однако его нельзя использовать 20 для уравновешивания сферических роторов.
Наиболее близким к предлагаемому изобретению по технической сущности является устройство для уравновеШи- . 25 вания изделий, содержащее основание, внешнюю траверсу, установленную на нем с возможностью поворота относительно вертикальной оси, внутреннюю траверсу, установленную во внеш- 30
ней с возможностью поворота вокруг горизонтальной оси, опору для размещения изделия в виде замка, соединяемого с внутренней траверсой, и измерительную систему, выполненную в виде последовательно соединенного датчика и электромеханического компенсатора поворота траверс к каждой траверсе 2 . Перед уравновешиванием изделия производится тарировка устройства и его эталонирование с по.мощью эталонной детали, после чего Под действием уравновешиваемой детали траверсы отклоняются на некото1Ж1е углы, которые фиксируются измерительными системами к каждой траверсе, создающинет компенсационные токи. Компенсаторы возвращают траверсы в начальное состояние равновесия.
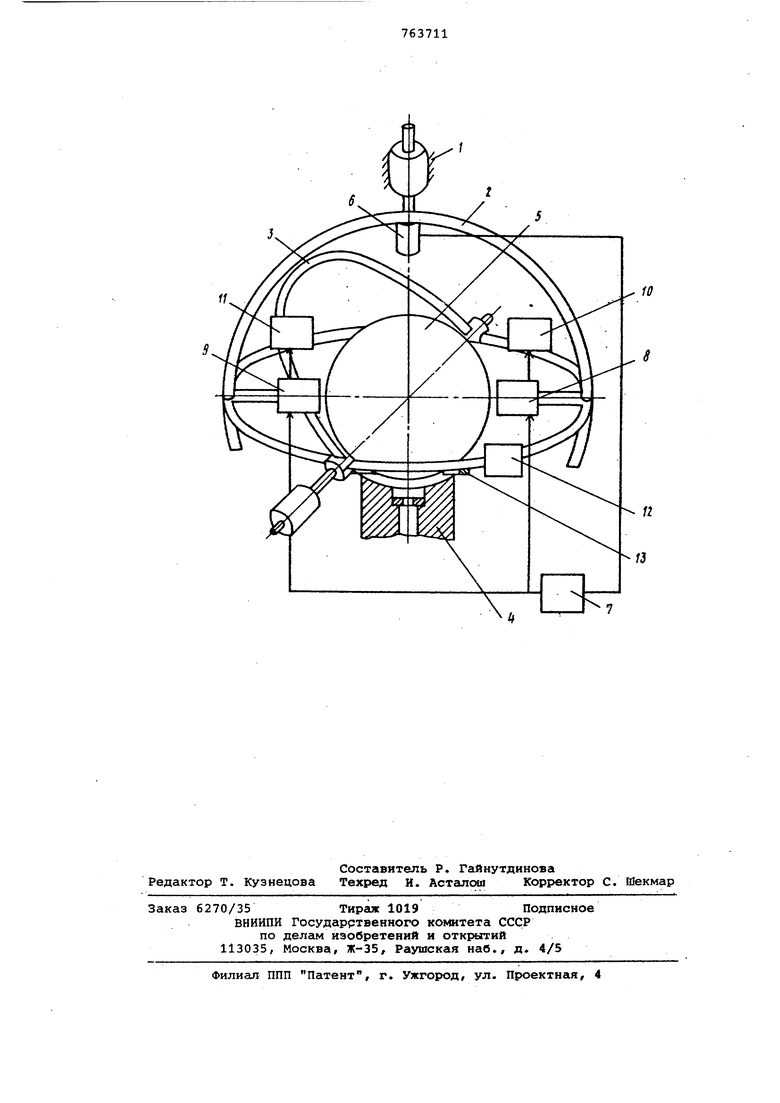
Недостатком устройства является невысокая точность уравновешивания, так как на нее оказывают влияние погрешности эталонирования, установки уравновешиваемого изделия в опору и геометрии детали по отношению к эталону. К роме того, недостатком устройства является невозможность уравновешивания с его помотцйю сферических роторов. Целью изобретения является обеспечение уравновешивания изделий типа сферических роторов и повьюение точности. Цель достигается тем, что опора выполнена аэростатической по форме .изделия, центр которой совпадает с точкой пересечения осей траверс, а электромеханический компенсатор пово рота траверс вьшолнен в виде двух дугостаторных асинхронных двигателей, статоры которых размещены на внешней траверсе и устанавливаются диаметрально относительно оси уравновешиваемого ротора. На чертеже изображена схема устро ства для уравновешивания. Устройство содержит основание 1, внешнюю траверсу 2, установленную на основании 1 с возможностью поворота относительно вертикальной оси, внут.реннюю траверсу 3, установленную в траверсе- 2 с возможностью поворота вокруг горизонтальной оси, аэростатическую опору 4 для размещения сферического ротора 5, при этом центр опоры совпадает с точкой пересечения осей траверс. Устройство содержит также измерительную систему которая выполнена в виде дифференциального датчика 6 углового положения ротора 5, управляющего устройства 7, соединенного с выходом датчика б, электромеханического рсомпенсатора поворота траверс 2 и 3, выполненного в виде двух дугостаторных асинхронных двигателей, статоры 8 и 9 которы расположены на внешней траверсе 2 диаметрально относительно оси ротора 5, являющегося ротором двигателей, и измерителей 10, 11 реактивного усилия, каждый из которых соединен с соответствующим статором 8 или 9 синхронных двигателей. На внешней траверсе 2 установлено приспособление 12 для нанесения светоконтрастной метки науравновешиваемый ротор 5, а на опоре установлен арретир 13 Устройство работает следующим образом. В исходном положении ротор 5 раз щен в опоре 4 тяжелым местом вниз, при этрм система стабилизации (на чертеже не показана) углового положения ротора 5 обесточена., Для опре деления величины дисбаланса ротор 5 снимается с арретира 13. Под воздей ствием несбалансированности он раэ. вернАтся тяжелым местом вниз. Внешнюю траверсу 2 необходимо повернуть таким образом, чтобы светоконтрастная метка оказалась на оси расположения статоров 8 9. Включают арретир 13 и вручную разворачивают ротор 5 таким образом, чтобы светокон растная метка оказалась сверху и ось траверсы 2 проходила через метк При этом тяжелое место будет находиться в горизонтальной плоскости н оси расположения статоров 8, 9. Включают систему стабилизации углового положения ротора 5 и опускают арретир 13. Под действием неуравновешенности ротор 5 начнет поворачиваться. На выходе датчика 6 появится сигнал рассогласования. Под действием этого сигнала управляющее устройство.7 в соответствии с заданным алгоритмом управления формирует выходное напряжение, которое прикладывается к обмоткам статоров 8,9. Развиваемые моменты имеют знак, противоположный знаку дисбаланса. После окончания переходного процесса ротор 5 займет такое положение, что светоконстрастная метка будет находиться симметрично относительно дифференциального датчика 6 , а момент дисбаланса будет полностью уравновешен электромеханическим компенсатором поворота. Измерители 10, 11 дают возможность определить величину момента дисбаланса ротора 5 в сумме с турбинным моментом. Для исключения последнего из результата измерения поднимают арретир 13, ротор 5 разворачивают на 1.80° и снова включают систему стабилизации углового положения. Момент дисбаланса будет равен полусумме двух измерений. Большая чувствительность за счет полного отсутствия механического трения позволяет с большой точ- ностью измерять величину момента,создаваемого неуравновешенной массой сферического ротора,что в конечном счете повысит точность уравновешивания, Формула изобретения Устройство для уравновешивания изделий, содержащее основание, внешнюю траверсу., установленную на нем с возможностью поворота относительно вертикальной оси, внутреннюю траверсу, установленную во внешней с возможностью поворота вокруг горизонтальной оси, опору для размещения изделия и измерительную систему с электромеханическим компенсатором поворота траверс, отличающееся тем; что, с целью обеспечения уравновешивания изделий типа сферических роторов и повышения точ.HOCTK, опора выполнена аэростатической по форме изделия, центр которой совпадает с точкой пересечения осей траверс, а электромеханический компенсатор поворота траверс выполнен в виде двух дугостаторных асинхронных двигателей, статоры которых размещены на внешней траверсе и устанавливаются диаметрально относительно оси уравновешиваемого ротора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 439715, кл. G 01 М 1/12 1971. 2.Авторское свидетельство СССР 570807, кл. G 01 М 1/12, 1974 (прототип).
11
п
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик момента для платформы динами-чЕСКОгО СТЕНдА | 1978 |
|
SU838449A1 |
| Балансировочное устройство | 1971 |
|
SU439715A1 |
| Устройство для определения координат центра масс изделия | 1982 |
|
SU1021962A1 |
| Станок-качалка | 1986 |
|
SU1344942A1 |
| Измерительное устройство к балансировочному станку | 1971 |
|
SU503155A1 |
| Станок-качалка | 1979 |
|
SU905511A1 |
| ЗЕРНООЧИСТИТЕЛЬНАЯ МАШИНА | 2006 |
|
RU2314157C1 |
| СПОСОБ БАЛАНСИРОВКИ ИЗДЕЛИЯ | 2003 |
|
RU2245529C1 |
| ЗЕРНООЧИСТИТЕЛЬНАЯ МАШИНА | 2005 |
|
RU2287378C1 |
| Линейный электрический двигатель | 1981 |
|
SU1128343A1 |