1
Изобретение относится к измерительной технике и может быть использовано для определения статической неуравновешенности и центра тяжести изделий.
Известно устройство для определения координат центра тяжести, содержащее основание, подвижную платформу, датчики углового положения платформы, электромеханические компенсаторы момента неуравновешенности и блок измерения неуравновешенности l .
Однако наличие электромеханических компенсаторов, расположённых по осям вращения платформы, не позволяет применить чувствительный ленточный подвес подвижной части устройства и не обеспечивает заданной точности измерения.
Наиболее близким к изобретению по технической сущности является балансировочное устройство, содержащее основание, упруго подвешенную к
нему платформу, датчик поворотов платформы, связанный последовательно соединенными блоком управления и индикатором неуравновешенности, блок измерения неуравновешенности и механизм компенсации неуравновешенности, состоящий КЗ линейных потенциометров с движками,балансировочных грузов и электропроводов для их перемещения 12}.
Недостатком известного устройства является невысокая точность измерения, обусловленная порогом чувствительности потенциометров и зазорами в кинематических звеньях механизмов компенсации.
Цель изобретения - повьшхение- точности и чувствительности.
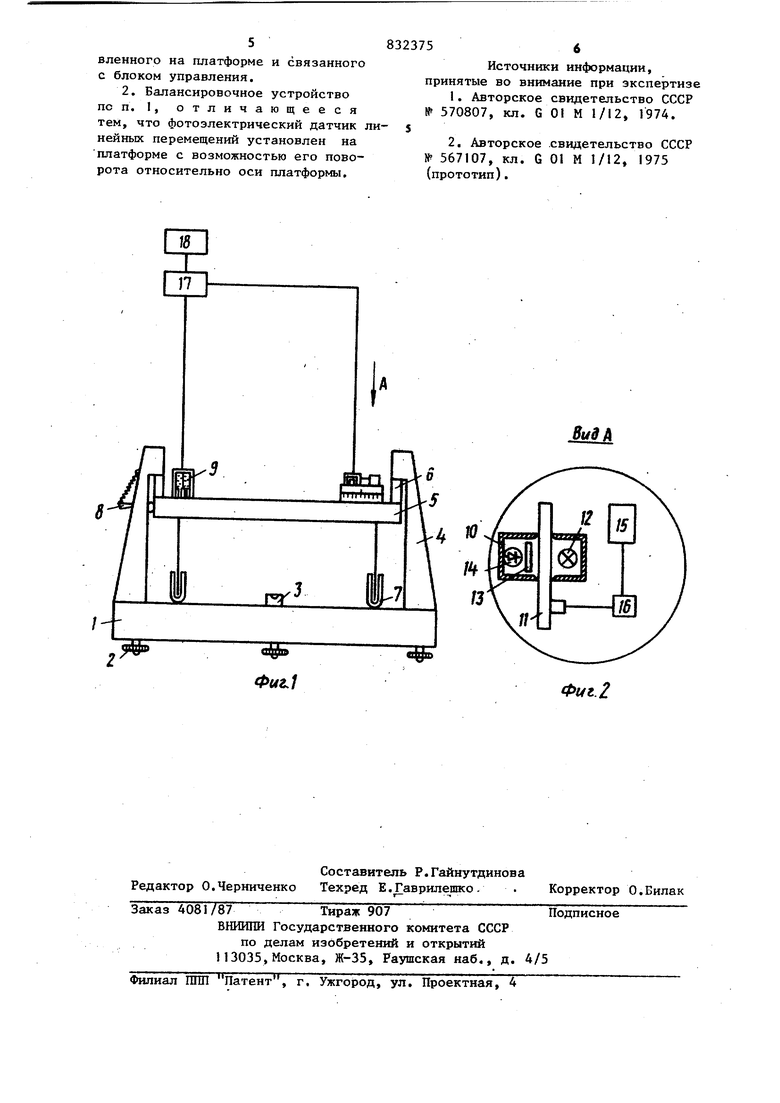
Поставленная цель достигается тем что блок измерения неуравновешенности и механизм компенсации выполнен в виде фотоэлектрического датчика линейных перемещений, устанопленного па платформе и связанного с блоком управления. Кроме того, фотоэлектрический да чик установлен на платформе с возможностью его поворота относительно оси платформы. На фиг« 1 изображена структурная схема предпагаемого устройства; на фиг с 2 - вид А на фиг, 1, . Устройство содержит основание I, выставляющееся в плоскости горизонта тремя домкратами 2 по ж щкостному уровню Зе На основании 1 установ лены две стойки 4, Платформа 5 с ба лансируемьм изделием (на чертеже не показано) подвешена на плоск гх металлических пластинах 6. Демпферы 7 обеспечивают защиту от проникнове и мех-лтигсскуто систему внешних вибр ций и ппмех. Арретир 8 жестко фикси jjyer подви/кную шшпЬорму при трансifopvnpo.uKe. с целью исключения потгреждетшя подвеса. На платформе 5 стангжлены датчик 9 поворота плат- форми, а также механизм компенса-if.in; : Отклс измерения 1 еуравновешенHtjf :;Тз которые вы толнены в виде фо тоз:м-к;ри;ес11сого датчика перемещений, усчанолденного с возможностью ftfC: и.оБорота отгчэсительно платформы к содержащего расположенные в корпусе i О подвижный растр 1I в вид решетки, осветитель 12, неподвижную индексную решетку 13, фотоголовку а также привод, 15, связанный С; растром 1 Г посредством редуктора Устройство содержит также последовательно соединенные блок 17 упра ленил и индикатор 18 неуравновешенности, при этом блок 17 управления сое/динен с датчиком 9 поворота плат форглг, Устройство работает следующим образом . Фотоэлектрический датчик перемещений .устанавлива:ется на платформе 5 таким образом, что растр П перёмевШется перпендикулярно оси подвеса платформы 5, на которой закре-пляют балансируемое изделие. После снятия с арретира 8 платформа 5 пов рачивается вокруг горизонтальной ос на некоторый угол за счет наличия неуравновешенности изделия Напряжение,, пропорциональное этому углу и снимаемое с датчика 9 поворота, подается на блок 17, управления который вырабатывает сигнал, пропор циональный этому напряжению, и подает его на привод 15 растра 11. Растр 11 перемещается в корпусе 10 относительно неподвижной индексной решетки 1 3 в направлении, при котором платФорма 6 возвращается в исходное положение. При этом растр 11 выполняет роль балансировочного груза, компенсируя собственным весом момент неуравновешенности. Одновременно индикатор 18 по сигналам с фотоголовки 14 производит отсчет величины перемещения растра 11, по которой судят о неуравновешенности балансируемого изделия По мере компенсации момента статической неуравновешенности изделия в процессе его балансировки, изменение точност и чувствительности компенсации моментов неуравновешенности обеспечивается поворотом фотоэлектрического датчика относительно платформы 5. При этом изменяется угол между осью подвеса платформы и направлением перемещения растра П . Выполнение блока измерения неуравновешенности и механизма компенсации в виде единого блока фотоэлектрического датчика, растр которого выполняет роль балансировочного груза, исключает влияние зазоров кинематических звеньев механизма компенсации. Установка фотоэлектрического, датчика перемещений с возможностью его поворота относительир оси платформы позволяет повысить чувствительность устройства при измерении угла между осью подвеса платформы и направлением перемещения растра. Формула изобретения 1. Балансировочное -устройство, содержащее основание, упруго подвешенную к нему платформу, датчик поворота платформы, связанный последовательно соединенными блоком управления и индикатором неуравновешенности, блок измерения неуравновешенности и механизм компенсации, отличающееся тем, что, с целью повышения точности и чувствительности, блок измерения неуравновешенности и механизм компенсации вьшолнены в виде фотоэлектрического датчика линейных перемещений, установленного на платформе и связанного с блоком управления.
2. Балансировочное устройство по п. 1, отличающееся тем, что фотоэлектрический датчик линейных перемещений установлен на платформе с возможностью его поворота относительно оси платформы.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 570807, кл. G 01 М 1/12, 1974.
2.Авторское .свидетельство СССР № 567107, кл. G 01 М 1/12, 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Балансирующее устройство | 1988 |
|
SU1657993A1 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2007 |
|
RU2339926C1 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КАРДАННЫХ ПЕРЕДАЧ | 2002 |
|
RU2225603C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИСБАЛАНСА РАМ ГИРОСТАБИЛИЗАТОРА | 2017 |
|
RU2655986C1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЙ | 2002 |
|
RU2225602C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
| Устройство для определения моментов газостатических опор | 1987 |
|
SU1525491A2 |
| СПОСОБ ВЕРТИКАЛЬНОЙ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2539810C1 |
| Устройство для статической балансировки подвижной части прибора | 1984 |
|
SU1216691A1 |
МА
Фиг.1
Фиг. 2
