о
1
oss
9
Изобретение относится к испытательной технике, а именно к средствам исследования статистических, динамических и эксплуатационных характеристик устройств посредством воздействия на них нагрузками различного вида, и является усовершенствованием изобретения по авт, св. Nfe 1525353.
Цель изобретения - расширение экс- itM, ;vrsft$OHHbix возможностей путем имитаций н-агружения объекта инерционным грузом на нежесткой подвеске с люфтом в кинематической цепи объект - груз.
На чертеже представлена структурная схема автоматической системы нагружения привода.
Автоматическая система содержит гидравлический привод-нагружатель 1, шток которого жестко связан со штоком испытуемою привода 2. в рабочие полости приво- да-нагружателя 1 установлены датчики 3 дашения, соединенные с вычитателем 4, подключенным выходом к инвертирующему входу усилителя 5 нагружателя, блок 6 задания нагрузок (БЗН), датчик 7 положения штока испыпуемого привода. Дополнительно i систему введены усилитель-формиро- зэт ;пь (УФ) 8 с зоной нечувствительности, дс-ийнгг- интегратор (ДИ) 9 и переключатель г. ятмрьмя группами MV контактов. УФ 8 прямым входом через первую группу I кон- , переключателя связан с датчиком 7, инзеотирующим входом - с выходом ДИ 9, а выходом - с первь м входом ДИ 9 и через старую группу М контактов переключателя с вторым входом усилителя 5. Второй вход ДИ 9 через третью группу III контактов переключателя связан с выходом БЗН б; вход БЗН б через четвертую группу IV контактов переключателя подключен к выходу ДИ 9.
Система работает следующим образом.
В исходном положении БЗН 6 включен между выходом датчика 7 и вторым входом усилителя 5.
ЙыходгсЛ сигнал ЕЫЧИГЗТСЛЯ 4, пропорциональный перепаду давления в полостях привода-нагружателя 1, поступает на инвертирующий вход усилителя 5, на прямой вход которого поступает сигнал программного перепада давления с БЗН 6. Управляющий сигнал с усилителя 5 нагружателя (сигн . рассогласования между фактическим и программным перепадами давления
в полостях гидроцилиндра) поступает на вход гидроусилителя привода-нагружателя 1.
В другом положении переключателя 10 на входы УФ 8 одновременно поступают
сигнал с датчика 7 о положении штока испытуемого привода 2 и выходной сигнал ДИ 9. На выходе ДИ 9 формируется в электрическом масштабе координата центра масс имитируемого груза. Разность этих сигналов является электрическим эквивалентом деформации упругой подвески, а реализованная в УФ 8 зона нечувствительности - эквивалентном люфта в кинематической цепи. Действительно, если разность сигналов
на входе УФ 8 превысит зону нечувствительности, то на его выходе формируется сигнал, пропорциональный усилению, действующему со стороны привода на инерционный груз (сигнал поступает на первый вход ДИ 9)
и, соответственно, со стороны груза на привод (сигнал поступает на второй вход усилителя 5). При этом имитируемая жесткость подвески пропорциональна коэффициенту усиления УФ 8. Благодаря использованию
известного БЗН 6 в цепи обратной связи ДИ 9 возможен учет влияния на движение имитируемого груза демпфирующих, позиционных или внешних сил или всего пакета нагрузок, описанных в прототипе, одновременно.
Формула изобретение Автоматическая система нагружения по авт. св. № 1525353, отличающаяся тем, что, с целью расширения эксплуатационных возможностей путем имитации нагружения грузом на нежесткой подвеске с люфтом в кинематической цепи объект-груз, оно снабжено усилителем-формирователем с зоной нечувствительности, двойным интегратором и переключателем с четырьмя группами контактов, усилитель-формирователь прямым входом через первую группу контактов связан с датчиком положения объекта, инвертирующим входом - с выходом двойного интегратора, а выходом - с первым входом двойного интегратора и через вторую группу контактов с вторым входом усилителя-нагружателя, второй вход двойного интегратора через третью группу
контактов связан с выходом блока задания нагрузок, подключенного входом через четвертую группу контактов к выходу двойно - интегратора.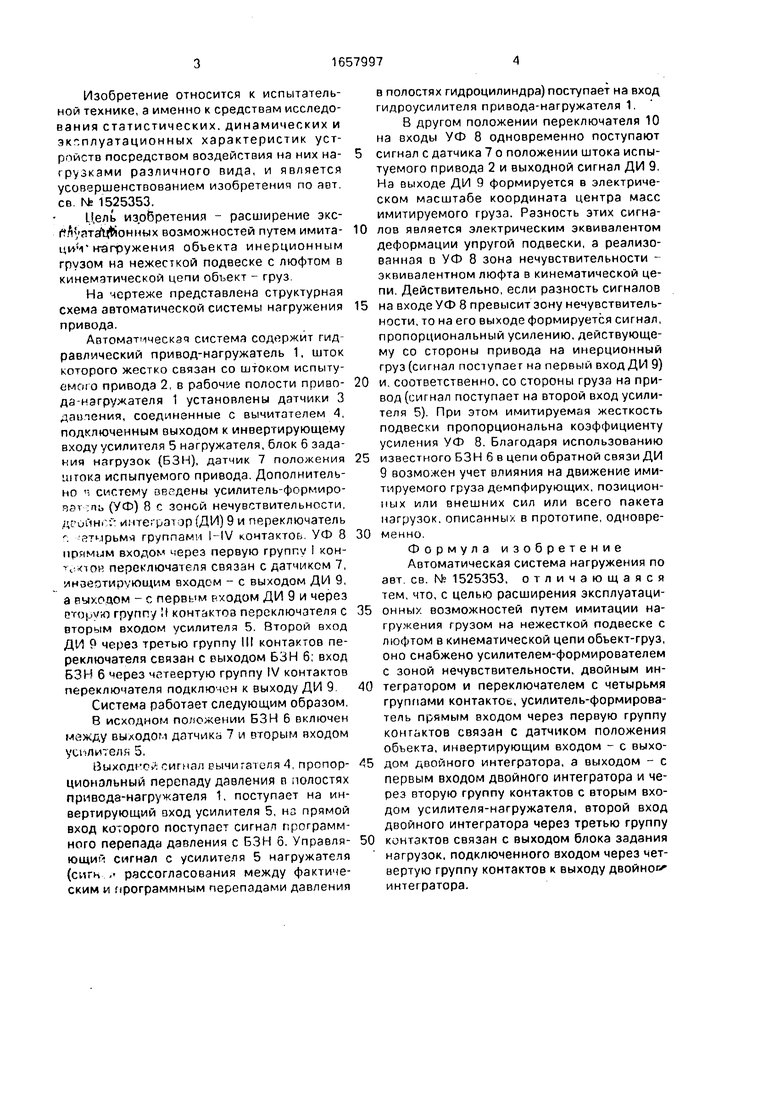
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для воспроизведения малых угловых скоростей | 1990 |
|
SU1720023A1 |
| Устройство для имитации аккумуляторной батареи | 1984 |
|
SU1277251A1 |
| Стенд для испытания передач | 1984 |
|
SU1196718A1 |
| Автоматическая система нагружения | 1988 |
|
SU1525353A1 |
| Дискретный авторегулятор для мелиоративных систем | 1981 |
|
SU996992A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2057309C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2057310C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2073835C1 |
| Устройство регулирования ширины полосы на станах горячей прокатки | 1981 |
|
SU982833A1 |
| Модель частотно-импульсного модулятора | 1977 |
|
SU651365A1 |
Изобретение относится к испытательной технике. Цель изобретения - расширение эксплуатационных возможностей путем имитации нагружения объекта инерционным грузом на нежесткой подвеске с люфтом в кинематической цепи объект - груз, Автоматическая система нагружения состоит из электрогидравлического привода-на- гружателя 1, выходное звено которого жестко соединено с испытуемым объектом, датчиков 3 давления, установлет-о -х в поло сти гидроцилиндра нагружэтел-i и соеди ненных с вычитателем 4 выходной сигнал которого, пропорциональный перепаду дае- ления в полостях, поступает на инвертирующий вход усилителя 5 нагружателя, на прямой вход которого поступает сигнал программного перепада давления с блока 6 задания нагрузок. Управляющий сигнял с усилителя 5 нагружателя (сигнап paccor.ti: сования между фактическим и программным перепадами давления в полостях гидроцилиндра) поступает на вход гидроусилителя привода-нагружателя . На выходе двойного интегратора 9 Формируется в электрическом масштабе координата центра масс имитируемого груза. На г ыходе уси- лителя-формирователя 8 с зоной нечувствительности, эквивалентной люфту в кинематической цепи, формируется сигнал, пропорциональный деформации упругой подвески. 1 ил. г fc
| Автоматическая система нагружения | 1988 |
|
SU1525353A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
