(54) МОДЕЛЬ ЧАСТОТНО-ИМПУЛЬСНОГО МОДУЛЯТОРА


| название | год | авторы | номер документа |
|---|---|---|---|
| Широтно-импульсный мрдулятор | 1975 |
|
SU548936A1 |
| Система автоматического управления инерционным объектом | 1980 |
|
SU901994A1 |
| Множительное устройство | 1981 |
|
SU955104A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПЕРЕКРЕСТНЫХ ИСКАЖЕНИЙ В СИСТЕМАХ ПЕРЕДАЧИ ИНФОРМАЦИИ С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1991 |
|
RU2010322C1 |
| Импульсный регулятор | 1978 |
|
SU744437A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ В ЧАСТОТУ ИМПУЛЬСОВ | 2014 |
|
RU2546074C1 |
| Частотно-импульсный регулятор | 1984 |
|
SU1238028A1 |
| Формирователь квантованного по уровню напряжения ступенчатой формы | 1983 |
|
SU1105907A1 |
| ДАТЧИК НУЛЕВОГО ТОКА | 2009 |
|
RU2390906C1 |
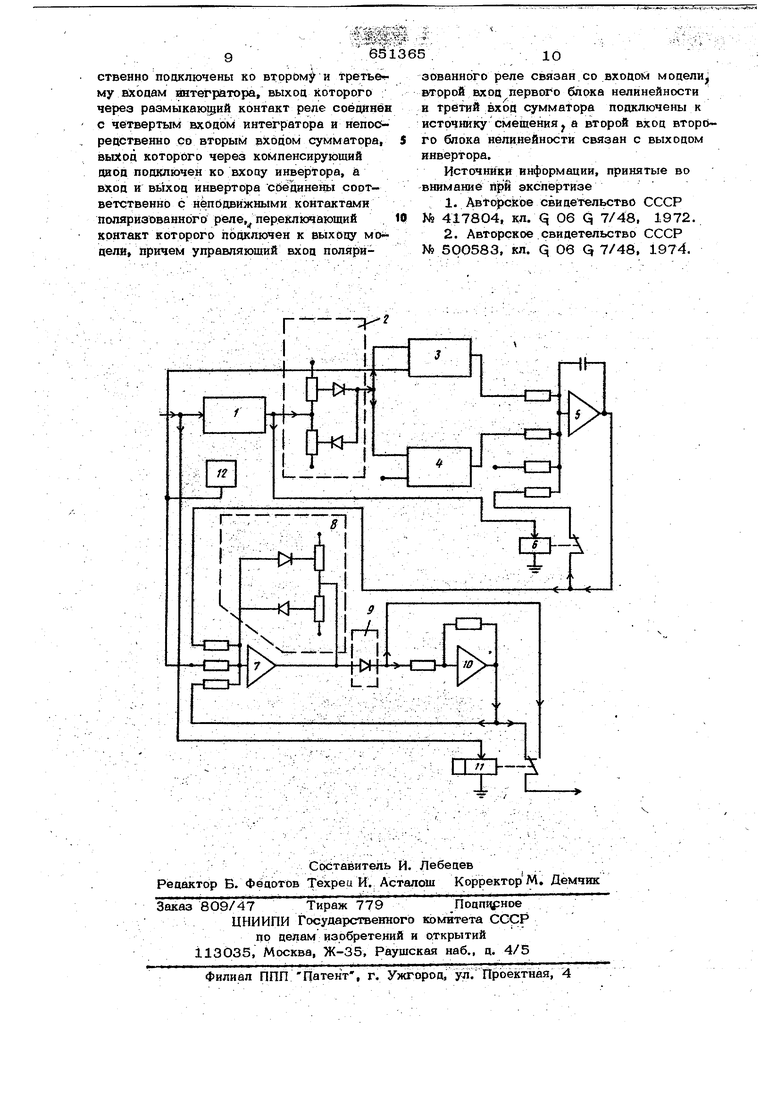
. . -1. Изобретение относится к автоматаке и вычислительной технике, может быть использовано при исследовании на электронных аналоговых вычислительных машинах (АВМ) нелинейных импульсов систем автоматического управления с частотно-импульсными модуляторами второго рода, предназначенных для уп{эавлёния объек тами как с большой, так и с малой инерционностью (промышленное и судовое рбору дованиё, всевозможные телеметрические системы, биокибернетические системь и ; т. п.). .;,„ .. .: Известны устройства для моцелировани на АВМ частотно-импульсной модуляции в автоматических системах. В большинстве из них до частоте модулируется последовательность получаемых с генератора управляющих импульсов, и на выходе получается частотно-импульсная последовательность с постоянными амплитудой и длительностью импульсов. Характеристика зависимости частоть импульсов от амплитуды входного непрерывного сигнала не проходит через начало координат. Знакопеременность этой характеристики может р€|еспечена лишь путем увеличения количества используемых в схеме элементов. Возможность изменения чувствительности ко входному нёпрерь1вному сигналу не предусмотрена. Устройства такого типа оЫйЧаются сложностью настройк1а, так как содержат большое копя чество элементов, а часгтноств диодных ll Г Известна КюДеяь «йистргао-импуяьсйого модулятора ||2|, содержащая блок выделения модуля / сде| Е ве1йный с блоками (задания нелинейности типа зоны нечувствительности, реле, управляющий вход которого подключен к выходу блока выде модуля, сумматор с диодным ограничителем в цепи офатной связи, инвертор, вь1ход которого соединен со входом интегратора и с первым входом сумматора, и источник смещения. Недостаток модели заключается в -том, что она может быть использована для имитации работы частотно-импульсньцс модуляторов второго рода с неполным сбросом HHtfet pHpy щетЬ элемента. Цель .изобретения - повышение точнос ти модели путем обеспечения ргежимга работы «1аст6тнб«-импуп1лснЬго модулятора второго рода с полным обнулеввем Ш{те- грЕЩйи. Для этого в устройство цойойнительно введены два блока нелвйейности, компенсирующий onoit и поляризованное реле, причем блока зааания нелинейности типа зоны, нечувствительности пойключен к первым входам блоков нелинейности, в&{хойы которых соответственно под клкшени ко второму в третьему входам интегратора, выход которогочёрШразмыкающий контакт реле соеданен с четвёртым входом интегратора и йепосрбдственно со входом сумматора, вы ход которого через ксялпевсирукжий {щод подключен ко вхооу инвертора, и вход и Ш4Х011 И1шерто0а соэ( соответственно с деподважными контактами поляризованнсж о реле, )чакядий контакт ко тсфого подкл1йчен к выходу модели, причем управляющий вход ролярьзованнса о peji€ Связан со вхоЪом модели. Второй вход первого блока нелинейности а третий вход суммат1 а пошслюче к иЬточйику смещения, и втфЁ1Й (ГЙ йТфого ока нелинейности Сбязам с ин;вёртбра,;:-.:/,-;.:.. i/;-„.,:-: - - -. :. Схема модели азофажена яа чертеже ШЕ1рерыв1шйвх1 Н)ой сигнал+11 подается в выделения модуля (БМ Bbtxog которого соеои1Ю8 со входом бпо ка задания нелннейиоств типа зоны нечувставтеяы10сти,{БЗН)2. Выход БЗМ 2 соеданен с первыми входшди блоков нелвнейностй (БН) 3 и 4, выходы которых соесщйёны с первым и ЁХОДЁМВ интегратора 5; ко второму входу БН 3 подключается -f ЮО в. Выхо интегратора 5 соединен со своим четверплм одсм через размыкаю щий контакт реле бис первым входом сумматора 7 с д &дным ограничителем (До) 8 в обратной связи. Шаход сумматора 7 через компенсирующий tmoa 9 под ключен ко входу инвертора 1О и к одньму из йепо1№ижных контактов поляризованнея о реле 11, на управляющий вход которого подается сигнал iUjg . С переключающего контакта реле 11 снимает ся знакопеременный выходной частотноимпульсный сигнал. Выход инвертора 10 соединен с другим неподвижным контактом реле 11, вторым входом БН 4 и третьим входом интегратора 5. Предлагаемая модель моделирует частоТно-импульсные модуляторы второго рода с полным сбросом, преобразующие входной непрерывный сигнал в частотноимпульсный С постоянной амплитудой и длительностью импульсов. Она содержит источник смещения 12. /, При модель обеспечивает возможность воспроизведения любой формы, проходящей через начало координат двухполярной характеристики зависимости час-. TOTbi ВБЬсодногЬ частотно-4 Мйульсногр от амплитуды входного непрерывного. Процесс преобразования напряжения в чдототу HMi nbcbfii проиС}{:о1дат в предпагаемом устрстйстве следующим образом. В MtiMSiff вр«у|ени t ji I когДй на входе устроЙст1Ва появляется непрерывный входной сигнал itlsxiffc О на управляю шнй вход реле 6 с ВМ 1 поступает сигнал t/ttuj jlitO. Он вызывает срабатывание реле 6 и размыкание го контакта в цеш глубокой отрицательной обратной связи с выхода интегратора на его четвертый вход. В следующий момент времени i. когда значение :ttl x следовательно, f заданное значение зоны нечувст1 1те1 Ьности устройства к непрерывному входноАбу сигналу, с блока БЗН 2 на БН 3 пбступйет сигнал +/8д,у„коРО|шй преобразуется в атом блоке в функцию +i|flljj jj H подеется на первый вход инTerpaTqpa 5. На вШходе интегратора на чт&&г расти по абсолюпзой велвчвЕве напряжение .. В момент t величина(П5) становится равной уставке сраёатывшвя воспроизведения релейной характеристики, которую составляют сумматор 7 с дйодшдм ограничителем 8 в о атной связи, снод 9 и инвертор 1О. Величина уставки огфеделяется величиной напряжения на втором входе сумматора 7 н его коэффициентом усиления по атому входу-. В результате этого на выходе сумматора 7 появляется сигнал +lluu., в виде прямоуголЕьного Импульса, а на выходе инвертора Ш - сигнал поступающие на неПодвижЕолеконтакты реле 11. С переключающего контакта реле ll при положительном значении входного непрерывного сигнал а ill jjj j подаваемого на управляющий вход реле 11, снимается , а при отрицательном его значении -Ц С появлением сигнала -Uyi/ rtii на выходе инвертора 10 на входах интегратора 5, кроме сигвала- 1(|11д(зц по - прежне му поступающего на его nej®bifl вход. появпяегся снгнал -|{ и х1ан и«п1° У .М. -.J . .М щий на его вход и полностью компенсирующий сигнал +flltaxUH) сигнал тупаюшийна третий вход. Таким образом оказываются задействованными каналь отрицательной обратной связи с вьисода 1 инвертора 10 на вход интегратора 5, вследствие чего напряжение -IJg иа выходе последнего начинает уме1й)Шаться по абсолютной величине. В момент времени t j, когданапряжение на выходе интегратора 5 достигает уровня отпускания схемы воспройзвё-дения релейной характеристики бпределяемого величиной наПряженияНки, и коэффициентом положительной обратной с вьосода инвертора 10 на Т1рётий вход сумматора 7, импульс ра выходе ; инвертора 10 исчезает, напряжениеи(|д|д становится рнбным нулю. Величина промежутка времени ottj доЬ и, следовательно, длительность KMi« пульса зависит таким образам с одной . стороны от уровня отпускания, с другой стороны - от скорости изменения , определяем ой суммарным напряжением на входах интегратора 5. Уровень отпускания (как и уровень срабатывания) остается постояНнык4 в пределах ирслёгдуемЬго динамическсмго процесса, при необходимости может и варьироватрб-, ся от процесса к процессу. Следсвательно, требование постоянства длительности импульсов выходного ЧастОтНо-йМпуЛйр ного сигнала может быть выполнено при условии поддержания постоянства ти изменения напряжения - IT в , что достигается при постоянстве суммарнемго напряжения на входах интегратора 5 в течение времени сущесТвОванияй, О. Для полученияU const в предлагаемой модели си1нал{{{ии,)зависящий от амплитуды/и, переменная составляющая суммарного входного напряжения иHTerpaTopia 5, полностью компенсируется сигналом -(и«хин)-иимг,. Скорость изменения выходного напряжения интегратора 5 постоянна, так как определяется только величинами коэффициента усиления по егО третьему входу , и амплитуды Ниддг, , которые в пределах одного исследуемого динамического процесса остаются постоянными, хотя при необхоцимости могут и варьироваться от процесса к процессу.. AMnnHTyaaUj,jj определяется уровнем ограничения, настраиваемого с номощЫю диодного ограничителя 8, включенного .. . ,. ..й..в« л.-1««м.ч ч обратную связь сумматора 7. Диод 9 служит для компенсации погрешности и ограничения нулевого уровня ДО8 и вклкйаетс Я так, чтобы в промежутках времени, когдаЦ 0, запирать на выходе сумматс а 7 напряжеше помехи со знаком, протиЁОположным по отношению к знаку +Uy, Тем самым повышается точность моделирования ы 1хойного частотно-импульсного си)гнапа. j Таким ddpaiaoM, в прёодагаембй модели KMHTKpy&tca прео азование непр ывногЬ сигнала в ч астоТночйМпульсный с постоянной шс4плитудой и длительностью. импульсов. Начиная с момента 14 на интегратора 5 снова остается только сигн1ал +1(Ш«.,1.Ji как до появле..J - ЙХЭН . .нйя ,о напряжение на его выходе начинает нарастать, т. е. прсжесс повторяется и продолжается до тех пор, пока входной непрерывный сигнал ±11 н, следовательно, не cfaHiST равным аадаййому значению зоны нечувствитель-. ности или меньше. В этот момент tj напряжение на выходе ВЗН 2 становится равным нулю, интегрирование прекращается, в на выходе интегратора 5 напряжение -13g остается постояннь1м до тех пор, пока 0 1«Bxi lVUKв тот же момент tg обесточивается катушка реле 6, вследствие чето через его размыкающийся контакт замыкается цепь глубокой отрицательной обратной СВЯЗИ С BbtxОда интегратора 5 на его четвертый вход, и напряжение на выходе etwo интегратора списывается к нулю со скоростью, офатно пропо щи опальной сопротивлению цепи обратной связи, т. е. практически мгновенно. При послеоующем изменении входного непрерывного Сигнала iU-.. до значений, меньших заданной величины зоны нечувствительности, напряжение -115 остается равным нулю, а с момента времени t/ J когда входной непрерывный сигнал увеличййается до значений, при которых -s,,j процесс чает, как былооп сано выше для промежутка с ti ао t5 . Таким образом, в предлагаемом устройстве имитируется полньн - сброс инте651365грйрующаго алёмента ВЗФ, моделируемoro чйстотно-импульсного модулятора втоpiiyhji Ofift, i ; ; : ; , В Ь1окй БН 3 и 4, как уже было ЬГМЙейо,пронехоонт преобразование сиг ,1й« (ъМ 1,д,дсоответственно. Вид т.11Ии{(Швхин) «определяется заданной фор мой Характервётяки. зависим ости 1цд -Р(ивкЛ. в общем случае для К4одели частотноимпульсного модулятора второго рода вы {%м)«: IРммп П4связывает «араметры- йк ор ааионной харак ёристгикй Частртнр-импуяьсногр сигнала частота сяедовашя импульсое, Т ояйгеяьиость импульсов с параме1 ш4и схемы мовели частотно-импуль cftdl b мойул ятора втечр яго рода (А «const -устовха срвбатмва шя, о conet- кодф нвиент усйлешя по переему входу интегрйтбра 5) и с {МплитудЬй вхеайого ие йре{ны1внся( сигнала tfj. Из 9ТсйГ(о выреа вуия спеаует, что
имя
(
Значения атой фуикани BH4HC) по (UfCKpeTiiUM значениями2 у| взятым в диа-soil
пазоне изменевня отЦ
ВХЗМ
.тах
Таким образом, в преаяевгвеме модели обеспечивается возможность варьирования ф1фм14 характеристики завжгимьсти L... P{llB,U
нияj- Л «-RK i путем соответствующего
wJlnil. дал t , . ..ж .
язменетя вида нелинейной функций (Bif 13м) во Ь1фриаводнмой в блоках БН 3 и 4.
йишчеше в блок шдоеления модуля . БМ 1 таким-образом,,-что навход его подается сигнал |Ftfw,a выход его сое оинен со входом блока БЗН 2, позволяет йопучить существенный, положительный. аффект. Прежде всего при оперировании с о опопярным сетналом исключаются рпфрецшв отладки симметричности реак-8
Ф b р М у л а из обре т ё н и я
Модель частотно-импульсного модуляТора, содержа1аая блок выделения мопогля, соединенный: р блок1 4 задания непинеййости типа аонь нёчувст ительйости, реле, управляющий Вход которого пойклкябн к выходу блок(а в Мделёния модуля, суммам то с Шоднь1М ограйнчителем в цепи обратной; связи, инвертор, выход которого среоййёй со входом интегратора и с первым входом сумматора, и источник сме шейия, о Т л и ч а ю щ а я с я тем, что, с цель повышения точности, в нее дополЕШтельно введены два блока нелинейности, компенсирующий диод иПоляризованное реле, причем выход блока задания нелинейности типа зоны нечувствительности подключен к первым входам блоков нелинейности, вь1ХоДы которых соответцйи схемы на положительный и отрицательный входной непрерывный сигнал, чтр позволяет существенно сократить затрать1 времени, необходимого для комплектации и настройки модели на требуемый режим и упростить его эксплуатацию. Наконец, по тем же причинам уменьшаются погрешности воспроизведения процесса преобразования непрерывного сигнала в частотно-импульсный и, следовательно, повышается точность моделирования частотно-41мпульсного модулятора второго рода. Введение в схему пойяри- зованного реле обеспечивает получение наряду с парафазным выходным импульс ным сигнале ; также дбухполярного, изменяк)щего знак в зависимости от знака входного H6npe{K№fiEt o, сигйала. Тем самым обеспечивается получение знакойёрёмённой хёрШтерйстики, зависимости вмxpдao o Ч асТ{ тнЬ-импульсного Сигнала от амплитуды входного непрер1дей1Яго.-;:; - :;v:0,:V:i-,:,.;.;. . .; Испрльзтеаше ia дреапагаецсмй устрбйст&е принципа кс пеисации iBMecTO прерьгвашя для исключения ; влияния на дли-Г т шй абсть Ш1пуй 0о& в«р1аного 1шпрё кого сигнала позвбляёт снять ограничен ние по верхней границе «iacTOTHwo iptaпа она прерывающего релейного элёмё fa. Тем самым ббеспечи1в ётся расширение рабочего дйа аёбйа «е Ч&стоте, определяемм о только полосой пропус кания бпёрШйбннЫх усилителей конкретной АВМ, используемой для реализдаии его;схемы. , - : .
