С
О1 СП
со
СП
со
Изобретение относится к гидроавтоматике и может быть использовано в стендовом оборудовании в составе устройств имитации нагрузки.
Цель изобретения повышение точности и расширение функциональных возможностей.
На чертеже изображена схема автоматической системы нагружения.
Система содержит жестко связанные штоками 1, 2 нривод-нагружатель 3 и нагружаемый объект 4, улектрогидравлический нреобразовате.чь 5 11ривода-на1-ружателя 3 и блок 6 управления нагрузкой, выполненный в виде первого, второго, третьего, четвертого и нятого масштабных усилителей 7-11 соответственно, первого и второго дифференциаторов 12, 13, умножителя 14, квадратора 15, формирователя 16 функции сигнатуры (), задатчика 17 усиления и шести- входового сумматора 18, причем кходы усилителя 7 и дифференциатора 12 связаны с датчиком 19 положения об ьекта 4, выход дифференциатора 12 соединен со входами усилителя 8, квадратора 15, дифференциатора 13 и формироателя 16, выход Г1()с,1ед- него соединен со входом уси.1ите,пя 9 и первым входом умножителя 14, соединенного вторым входом с выходом квадратора 1.), а выходом с входом ч члителя И), выход дифференциатора 13 соединен с входом усилите, 1я 1, а выходы усилите,1ей 7- 11 и задатчика 17 11()дк,:1ючены к входам сумматора 18, выход которого подключен к н)я- мому входу cciaBiniBaKJUieix) ycrjioi icTBa 20, инверсный вход которо1 О соединен с датчиком перепада давления, выполненным в виде датчиков 2i, 22 дав,1ения и (и чи ателя 23. Преобразовате.мь 5 вк.1ючает элекгромехаии- ческий привод и зо,;1отник (не изображены).
Автоматическая система на1- жения работает следующим образом.
Сигна. программного неренада давления ЛРпр, иропорциопальпый пр01 раммному значению нагрузки, подается на прямой вход устройства 20. На его пнверт11руюп1и(1 вход поступает си1 нал A/- t,ik, получаемый с помощью да 1чиков 21, 22 давления и вычн- тате;1Я 23, нропорциона. шньи факгически развиваемому нагружате,:1ем 3 усилию. В случае рассог;1асования между npoi-раммным значением перепада и фактическим ЛРфик устройством 20 выраба гываегся сиг- на„ 1 на перемещение золотника преобразователя 5 нагрчжателя 3, уменьп1аюший рассогласование. НрО раммное значение пере- нада Рп,, формируется блоком 6 в соответствии с соогнон1ением
АР. К,: Z-f Л, д- 7-ЬЛ кв7- S( +
- .4
+ F,,Sign( + ,
0
5
0
5
0
5
0
5
0
линейного трения; квадратичного тресухого трения; инерционной на5
,(,- площадь поршня нагружателя 3; Z, 2, Z -координата, скорость и ускорение
штока 1 объекта 4;
Л,. коэффициент позиционной нагрузки;
Л ко:)ффициент Кка - - коэффициент
н и я;
FTII величина силы М - ве.аичина массы
грузки;
F -- заданная величина нагрузки задатчика 17.
Как видно из соотношения, с помощью блока 6 может быть осуществлено поочередное или комбинированное воспроизведение позиционной, инерционной, постоянной, неременной по знаку и величию нагрузок, а также ,линейного сухого и квадратичного трения в П1ироком диапазоне частот, создаваемых нагрузок.
Формула изобретения
Автоматическая система нагружения, содержащая связанные штоками привод-нагру- жате, ц и нагружаемый объект, электрогидравлический преобразователь привода-на- гружате,:1я и блок управления нагрузкой, вход кото1)ог() с(.)единен с датчиком положения нагружаемого , а выход - с прямым входом сравнивающего устройства, инверсный вход которого подключен к датчику нагрузки цривода-нагружателя, а выход к входу электрогидравлического пре- образовате,|1Я, отличающаяся тем, что, с целью повьцпения точности и расширения ({л нкниональных возможностей, б.пок управления на|-рузкой выполнен в виде няти мас- пггабных усилителей, двух дифференциаторов, умножителя, квадратора, формирователя функции сигнатуры, задатчика усилия и шестивходового сумматора, причем входы первого усилителя и первого дифференциатора связаны с датчиком положения, выход перрюго дифференциатора соединен с входами второго усилителя, квадратора, второго диф()7еренциатора и формирователя функции си Шатуры, выход noc.ie.;iHero соединен с входом третьего усилителя и первы.м входом умножите, 1Я, соединенного вторым входом с выходом квадратора, а выходом - с входом четвертого усилителя, выход второго дифференциатора соединен с входом пятого усилителя, а выходы всех усилителей и задатчика усилия подк. 1ючены к входа.м сумматора, выход которого подключен к прямому входу сравниваюше1С) устройства, при этом П1ТОК11 привода-нагружателя и нагружаемого объекта жестко связаны между собой, а датчик нагрузки выполнен в виде датчика перепада давления.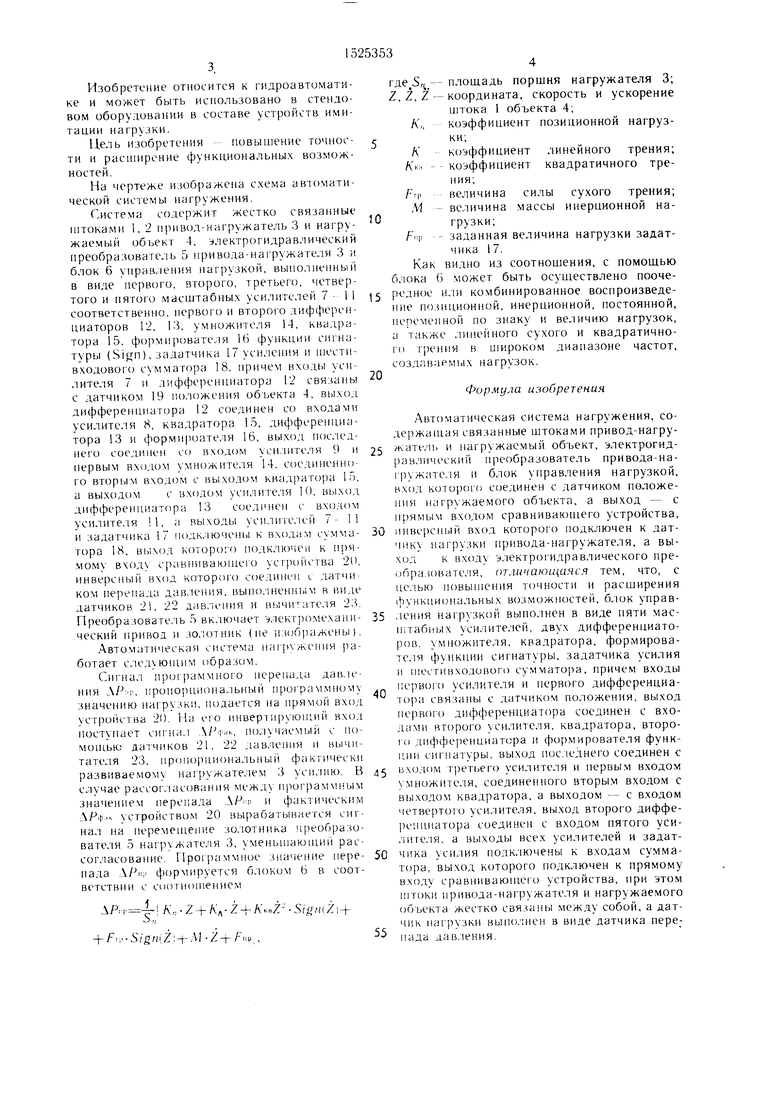
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая система нагружения | 1989 |
|
SU1657997A2 |
| Квазиоптимальная по быстродействию система управления | 1981 |
|
SU987575A1 |
| Устройство для управления промышленным роботом | 1986 |
|
SU1349998A1 |
| Многоканальная следящая система для испытания объектов на прочность | 1979 |
|
SU864052A1 |
| Устройство автоматического управления пространственным положением быстровращающегося ротора | 1990 |
|
SU1739100A1 |
| Устройство для моделирования удара тела о неподвижную преграду | 1985 |
|
SU1381341A1 |
| Устройство для преобразования параметров вращающегося объекта в электрический сигнал | 1985 |
|
SU1290099A1 |
| Устройство для определения теплоемкости термозависимых элементов | 1989 |
|
SU1679331A1 |
| Способ регулирования паровой турбины | 1985 |
|
SU1250661A1 |
| Устройство для моделирования удара твердых тел | 1988 |
|
SU1567889A2 |
Изобретение может быть использовано в стендовом оборудовании в составе устройств имитации нагрузки. Цель изобретения - повышение точности и расширение функциональных возможностей системы нагружения. Привод-нагружатель 3 и нагружаемый объект 4 связаны штоками 1,2. Вход блока 6 управления нагрузкой соединен с датчиком 19 положения объекта 4, выход - с прямым входом сравнивающего устройства 20. Блок 6 выполнен в виде пяти масштабных усилителей (У) 7-11, двух дифференциаторов (Д) 12,13, умножителя 14, квадратора 15, формирователя 16 функции сигнатуры, задатчика 17 усилия и шестивходового сумматора 18. Входы У 7 и Д 12 связаны с датчиком 19. Выход Д 12 соединен с входами У 8, квадратора 15, Д 13 и формирователя 16, выход последнего соединен с входом У 9 и первым входом умножителя 14. Второй вход умножителя 14 соединен с выходом квадратора 15, выход - с входом У 10. Выход Д 13 соединен с входом У 11. Выходы У 7-11 и задатчика 17 подключены к входам сумматора 18, выход которого подключен к прямому входу устройства 20. Штоки 1,2 жестко связаны между собой. Датчик 19 выполнен в виде датчика перепада давления. С помощью блока 6 может быть осуществлено поочередное или комбинированное воспроизведение позиционной, инерционной, постоянной и переменной по знаку и величине нагрузок. 1 ил.
| Стенд для испытания гидроцилиндров | 1977 |
|
SU673822A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
