Изобретение относится к измерительной технике и может найти применение в научно-исследовательских и заводских лабораториях для измерения скольжения электрических машин в процессе разбега.
Целью изобретения является повышение точности за счет снижения динамической составляющей погрешности на начальном этапе измерения.
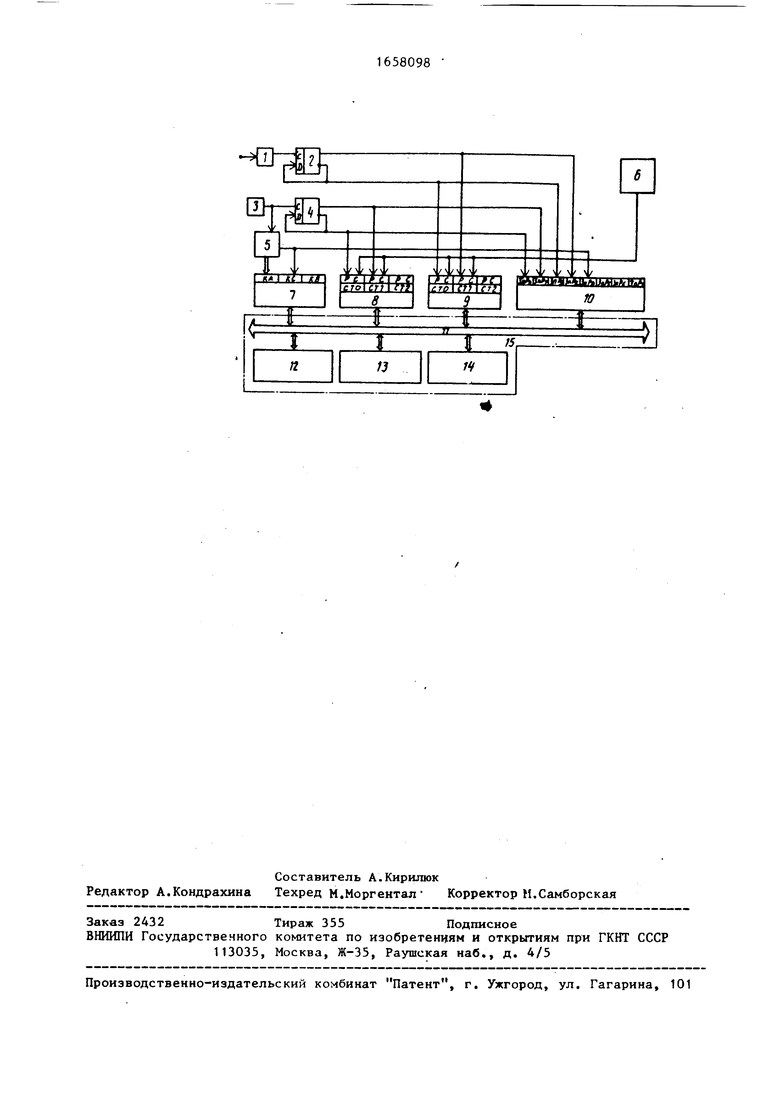
На чертеже приведена структурная схема устройства для измерения скольжения.
Устройство для измерения скольжения содерлит формирователь 1 частоты сети, счетный триггер 2, фотоэлектрический датчик 3 скорости вращения, счетный триггер 4, аналого-цифровой
преобразователь 5, генератор импульсов 6, параллельный интерфейс 7, программируемые таймеры 8 и 9, программируемый контроллер прерываний 10, а также системную шину 11, центральный процессор 12, блок 13 оперативной памяти и блок 14 отображения ин- оормации, входящие в состав блока 15 обработки.
Устройство работает следующим образом.
При подаче напряжения питания на устройство центральный процессор 12 осуществляет программирование блоков: канала А параллельного интерфейса 7 - На.режим стробируемого ввода информации, программируемых таймеров 8, 9 на режим прерывания терминального
Ьэ ел
оо
о со
00
счета, программируемого контроллера прерываний 10 - на равный приоритет входов.0 Соответственно этому, сигнал преобразуется аналого-цифровым преобразователем 5 и на выходе последовательно будет установлен код
Ne 2 (U + Vficosi№ (1)
Сигнал Конец преобразования на выходе преобразователя 5, поступая на соответствующий разряд канала С параллельного интерфейса 7 записывает информацию с выхода преобразователя 5 в буфер канала А параллельного интерфейса 7. Одновременно с этим запрос прерывания, сформированный по входу ЗПРА программируемого контроллера прерываний 10, заставляет цент- ральный процессор 12 записать зарегистрированное значение в ячейку блока оперативной памяти 13. Увеличив адрес ячейки памяти, центральный процессор 12 включает контролируемый электродвигатель и приступает к снятию характеристики разбега электродвигателя .
Аналого-цифровой преобразователь 5 работает в циклическом режиме, то есть Конец преобразования осуществляет запись информации в буфер канала А параллельного интерфейса 7 и осуществляет перезапуск преобраэова- (теля 5, начинающего новый цикл преобразования. По запросу прерывания на четвертому входу ЗПР4 программируемого контроллера прерываний 10 информация переписывается в ячейку блока
оперативной памяти 13.
Фотоэлектрический датчик скорости вращения формирует квазасинусоидаль- ный сигнал, который достаточно полно описывается первой гармоникой:
П2(Ц - а0 + (q + ),или (2)
n,fcf) - ae + a,coe((J ), (3)
где а на,- коэффициенты, зависящие от компонентов раст paj
- начальный фазовый угол. Поскольку функция пропускания П(ЦО определяется световым потоком Ф(Ср) оптронной пары, а это в свою оче- редь определяет напряжение на выходе фотоприемника, то гармонический сигнал на выходе датчика будет описываться уравнением
U(lf) U + UAcos(Cf + % ) . (4)
Аналого-цифровой преобразователь 5 осуществляет преобразование входного сигнала в соответствии с выражением
-У - 2
U
В ,
(5)
0
0
„ 5
5
где N - код, формируемый на выходе
АЦП;
Uon - опорное напряжение преобразователя ,
К - число двоичных разрядов АЦП, U вх - входное напряжение.
При отключенном электродвигателе растровый диск датчика 3 вращаться не будет и на вход аналого-цифрового преобразователя 5 будет поступать напряжение
U0 U + Цдсо8(р0,(6)
где U- - постоянная составляющая сигнала датчика;
U. - амплитудное значение переменной составляющей сигнала датчика.
При достижении сигналом на выходе датчика 3 порогового значения, триггер 4 опрокидывается в состояние, противоположное исходному, например из нуля в единицу. При этом на разрешающем входе Р первого счетчика СТ 1 программируемого таймера 8 будет установлен высокий уровень напряжения. Счетчик начинает подсчитывать импульсы эталонного генератора 6 и будет работать в течение времени, определяемого периодом сигнала датчика скорости:
60
;
(7)
где п. - первое значение скорости вращения ротора объекта контроля.
При повторном достижении сигналом датчика 3 порогового значения, триггер 4 опрокинется в нулевое состояние. При этом на разрешающем входе Р нулевого счетчика СТО программируемого таймера 8 будет устанавливать уровень логической единицы и этот счетчик начнет работать. В счетчике СТ1 программируемого таймера 8 окажется зафиксированным число.
И,
п
(8)
где Т период импульсов генерато- ра 6.
Запрос прерывания на нулевом входе контроллера (0 заставит центральный процессор 12 занести зарегистрированное значение в ячейку блока оперативной памяти 13 и перезагрузить счетчик СТ1 программируемого таймера 8, подготовив его к следующему циклу работы. После этого программным путем накладывается маска на четвертый разряд программируемого контроллера прерываний 10. Этим запрещается дальнейшая запись значений, зарегистрированных аналого-цифровым преобразователем 5 в блок оперативной памяти. Центральный процессор 12 переходит в режим ожидания прерываний.
Первый импульс, выработанный формирователем частоты сети 1, переведет триггер 2 в состояние, противоположное исходному, например из нуля в единицу. При этом на разрешающем входе Р первого счетчика СТ1 программируемого таймера 9 будет установлен уровень логической единицы и данный счетчик будет подсчитывать импульсы генератора 6 в течение времени, равный периоду сети Тс, .
Второй импульс, выработанный формирователем 1, переведет триггер 2 в нулевое состояние. При этом уровень логической единицы будет установлен на разрешающем входе Р нулевого счетчика СТО программируемого таймера 9. Счетчик СТ1 прекратит работу и в нем окажется зафиксированным число
lЈL.
(9)
Следуя запросу прерывания, поступившему на вход ЗПР2 контроллера 10, центральный Процессор 12 запишет значение С в ячейку блока оперативной памяти 13, установив соответствующую метку и, перегрузив счетчик, вернется в режим ожидания.
Следующее достижение сигналом датчика 3 порогового значения перебросит триггер 4 в единичное состояние. При этом снова уровень логической единицы будет установлен на разре- шаюцем входе Р первого счетчика СТ1 программируемого таймера 8 и этот счетчик начнет подсчет импульсов генератора 6. Счетчик СТО этого же таймера прекратит работу и в нем окажется зафиксированным число
Сигнал прерывания на входе ЗПР1 контроллера прерываний 10 заставит центральный процессор 12 переслать значение Мг в ячейку блока оперативной па-| мяти 13. Перезагрузив счетчик, центральный процессор 12 возвращается в режим ожидания.
Третий импульс, выработанный фор- мирователем 1, переведет триггер 2 в единичное состояние. При этом единица будет установлена на разрешающем входе Р первого счетчика СТ1 программируемого таймера 9 и этот счет- чик прекратит работу, в нем окажется зафиксированным число:
ТС4/Т°
(11)
Запрос прерывания на входе ЗПРЗ прог- раммируемого контроллера 10 заставит центральный процессор 12 записать зарегистрированное значение в ячейку блока оперативной памяти 13, установив соответствующую метку. Перезагру- зив счетчик, центральный процессор 12 возвращается в режим ожидания.
Процесс измерения продолжается до тех пор, пока вся область памяти, отведенная под регистрируемые значения,
не будет заполнена. По окончании процесса регистрации будет сформировано два массива значений Первый - из значений Nj, зарегистрированных аналого- цифровым преобразователем 5 и включающим в себя один полный и один неполный периоды сигнала датчика скорости 3, а также массив из значений Мj и С , зарегистрированных программируемыми таймерами 8, 9. Причем значения Ml и С отличаются друг от дру- г# метками, устанавливаемыми при записи значений С. Дав команду Запрещение прерываний, блокирующую связь блока обработки с измерительной частью, центральный процессор 12 приступает к обработке зарегистрированных значений. I
Из массива значения 11 выбираются
максимальное и минимальное значения, по которым определяется постоянная составляющая U и амплитуда переменной составляющей сигнала датчика:
55
N Ллй-КС-ИЛ-МЙЙ.
(12)

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скольжения асинхронных электродвигателей | 1986 |
|
SU1345121A1 |
| Устройство для измерения разности частот вращения | 1986 |
|
SU1613959A1 |
| Устройство для измерения скольжения | 1988 |
|
SU1615617A1 |
| Устройство для измерения параметров вращения | 1986 |
|
SU1613960A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2004 |
|
RU2260192C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПРОЧНОСТИ КРЫЛА ВОЗДУШНОГО СУДНА | 2011 |
|
RU2469289C1 |
| Учебная установка по физике | 1991 |
|
SU1831716A3 |
| Устройство для поиска информации на магнитной ленте | 1986 |
|
SU1597912A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1988 |
|
SU1683244A1 |
| Устройство контроля и управления технологическим комплексом для намотки изделий | 1989 |
|
SU1661721A1 |
Изобретение относится к измерительной технике и монет найти применение в научно-исследовательских и заводских лабораториях для измерения скольжения электрических машин в процессе разбега. Целью изобретения является повышение точности. Устройство отличается от известных тем, что на начальном этапе скорость вращения, преобразованная фотоэлектрическим датчиком 3,измеряется с помощью аналого-цифрового преобразователя 5, а позднее- с помощью традиционных методов квантования временного интервала. Указанный алгоритм измерения позволяет устранить зону нечувствительности фотоэлектрического датчика 3 скорости и снизить динамическую составляющую погрешность. Квантование временных интервалов осуществляют программируемые таймеры 8 и 9 по частоте генератора 6 импульсов. Управление работой устройства и операции вычисления осуществляются с помощью микроЭВИ 15, работающей в режиме прерываний. 1 ил. (Л
-1Н
тп
60
neZT0
(10)
N
J JASl Ј-Z-llj W. 2
(13)
Исходя из выражения (14) определяется начальная фаза (D положения скоо °
рости
No
f.
U - UAcostf0,
UА
2KN0 - U N
arccos
-Ля о.О Uon U ft
(14) 5 (15)
(16) 10
Аналогично этому, исходя из выражений (5) и (6), определяются остальные значения Lf, + Cf0 :
arccos
2 ITj.-UJJ0n
(17)
Угловая ся:
скорость вращения определяетСО;
iL -WLl&l---Wi- l.
I- тч,
2 2Nr.,-U-UA arccos-г, г,-- - arccos-Jая.УЕО.УА
ЬчУА.
;
(18)
где TU длительность цикла преобразования аналого-цифрового преобразователя 5. Полученные значения преобразуются в значения Тр
Т1 t
ХР
21Г
ЭГ
(19)
Значения периода вращения для второ массива зарегистрированных значений определяется, исходя из выражения
(20)
Р)
HiToZl
а значения периодов сети
см
смто
С21)
Исходя из полученных соотношений, на начальном участке, скольжение определяется, исходя из выражения
гр I
jLЈi Р1
s, - -П
1100%.
(22)
Значения Т« берутся из выражения (27) На втором участке значения скольжения определяются, исходя из выражения:
s; --4 -Ilto-ioo%. j Apj
При этом в процессе расчета берутся значения Тр, лежащие между двумя эначениями периода сети ТС1П и TC, .
(23)
5
10
15
20
25
30
35
40
45
50
.
55
Формула изобретения
Устройство для измерения скольжения, содержащее фотоэлектрический датчик скорости вращения, бормнрователь частоты сети, два счетных триггера, генератор импульсов, аналого-цифровой преобразователь, параллельный интерфейс, программируемый таймер, программируемый контроллер прерываний и блок обработки, включающий в себя центральный процессор, блок оперативной памяти и блок отображения информации, причем прямой и инверсный выходы первого счетного триггера соединены с первым и вторым разрешающими входами программируемого таймера и с первым и вторым входами программируемого контроллера прерываний соответственно, первый и второй счетные входы программируемого таймера соединены с выходом генератора импульсов, выход фотоэлектрического датчика скорости вращения соединен с входом второго счетного триггера, первый и второй выходы аналого-цифрового преобразователя соединены с первым и вторым входами параллельного интерфейса соответственно, а программируемый таймер, программируемый контроллер прерываний, параллельный интерфейс, центральный процессор, блок оперативной памяти и блок отображения информации соединены с системной шиной блока обработки, отличающееся тем, что, с целью повышения точности, в него введен второй программируемый таймер, первый и второй счетные входы которого соединены с выходом генератора импульсов, первый и второй разрешающие входы второго программируемого таймера соединены с прямым и инверсным выходами второго счетного триггера и с третьим и четвертым входами программируемого контроллера прерываний соответственно, а выход соединен с системной шиной блока обработки, при этом пятый вход программируемого контроллера прерываний соединен с вторым выходом аналого-цифрового преобразователя, вход которого соединен с выходом фотоэлектрического датчика скорости вращения, а выход формирователя частоты сети соединен с входом первого счетного триггера.
| Устройство для измерения скольжения асинхронных электродвигателей | 1986 |
|
SU1345121A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
