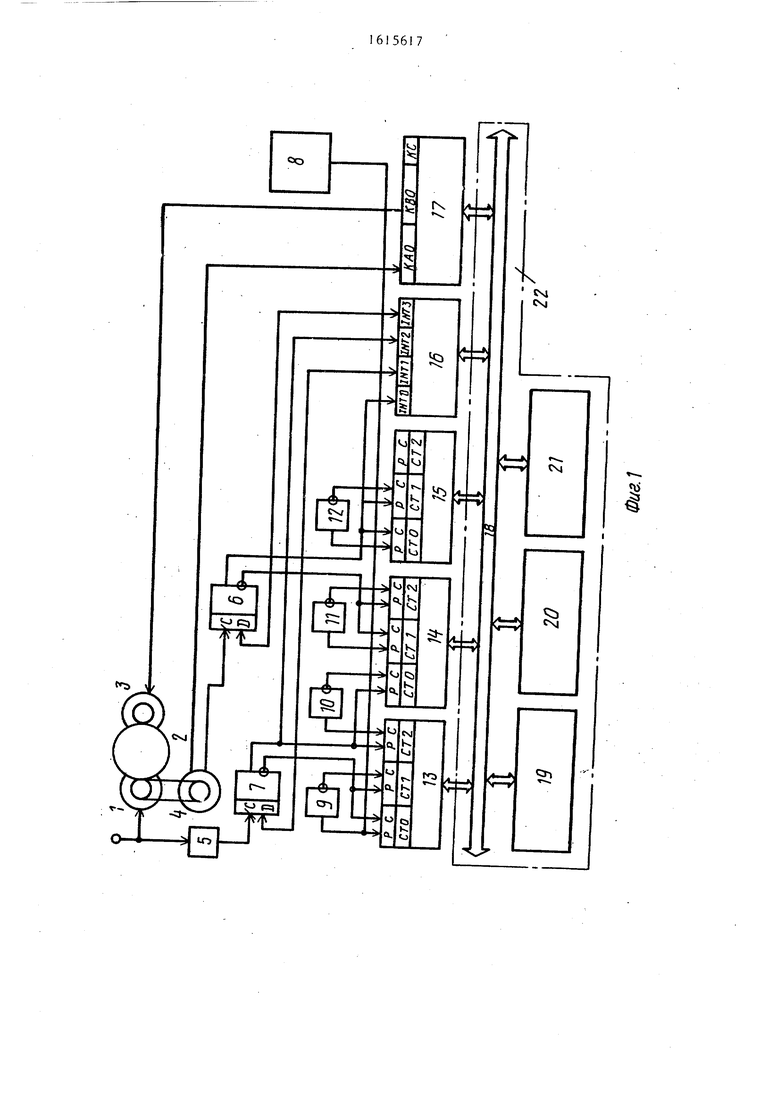
инвертора подключен к тактовому вхо- Ду С второго счетчш а СТ2, второго г|рограммируемого таймера, выход чет- riepToro инвертора соединен с такто- 9ЫМ входом С первого счетчика СТ1 tpeTbero программируемого таймера, гарограммируемый контроллер 16 прерываний, нулевой вход которого подклю- TjieH к разрешагогцим входам Р нулевого (Ьта и первого СТ1 счетчиков третьего программируемого таймера и пря- iioMy выходу первого триггера, пер- ый вход - к разрешающим входам Р Нулевого СТО и первого СТ1 счетчиков ервого программируемого таймера, ин .ерсному выходу второго триггера и Информационному входу D этого же триггера, второй вход - к разрешаю- 11ЦИМ входам Р второго счетчика СТ2
|первого программируемого таймера и |нулевого счетчика СТО второго прог- 1раммируемого таймера и прямому выхо- {ду второго .триггера, третий вход - :к разрешаюпщм входам Р первого СТ1 и ;второго СТ2 счетчиков ;второго прог- |раммируемого таймера, а также к ин- ;версному выходу Первого триггера и :информационному входу D этого же :триггера, параллельный интерфейс 17 нулевой разряд канала А которого соединен с сигнальным выходом Начало отсчета датчика скорости вращения, нулевой разряд канала В подключен к входу шагового двигателя, системный канал 18, посредством которого центральный процессор 19 связан с блоко
20оперативной памяти и устройством
21отображения информации, входяи;им
в состав микроэвм 22, а также с про раммируемыми таймерами, программируемым контроллером прерываний и параллельным интерфейсом.
Устройство для измерения скольжения работает следующим образом.
При подаче напряжения питания на устройство центральный процессор 19 в в соответствии с программой инициализации дает команду Запрещение прерьгоаний и осуществляет программирование внешних устройств такик образом, что каналы параллельного интерфейса 17 работают в режиме простого ввода-вывода, причем канал А - на ввод, а канал В - на вывод информации. Программируемый контроллер 16 прерываний настраивается на равный приоритет входов, а программируемый
5
0
таймер - на работу счетчиков в режиме прерывания терминального счета. После этого центральный процессор 19 на шнает опрашивать нулевой разряд канала А параллельного интерфейса 17. Если на входе КАО не установлена единица, то центральный процессор 19 программным путем через канал В параллельного интерфейса 17 формирует импульс, который поступает на шаговый двигатель 3. Вращение вала двигателя 3 через редуктор 2 передается на нал объекта 1 контроля. .
После этого имцульса вал объекта 1 контроля проворачивается на угол
,360
ОС -г- } К/. ,
где Z - число дискретов шагового двигателя за один оборот; К - передаточное число редуктора .
После этого снова осуществляется опрос КАО и цикл продолжается до тех пор, пока на входе этого разряда не установится единица. Это свидетельствует о том, что вал двигателя установлен в начальное положение. Цент- ральньй процессор 19 осуществляет загрузку счетчиков программируемых таймеров 13-15, дает команду Разрешение прерываний и через устройство
21отображения информации микроЭВМ
22дает разрешение оператору на включение электродвигателя.
Напряжение сети преобразуется в прямоугольные импульсы ТТЛ-уровня без изменения частоты, Первый импульс, поступивший на тактовый вход С второго триггера 7 переводит его в состояние, противоположное исходному, например нулевое, на время, равное периоду импульса сети. При этом на разрешающих входах Р нулевого СТО и первого СТ1 счетчиков первого программируемого таймера 13 устанавливается уровень логической единицы и указанные счетчики начинают процесс квантования.
Первый импульс, поступивший на тактовый вход первого триггера 6 с датчика 4 угловой скорости, переводит его в состояние, противоположное исходному, например единичное. При этом на разрешающих входах Р нулевого СТО и первого СТ1 счетчиков третьего программируемого таймера 15
устанавливается уровень логической единицы и счетчики начинают процесс квантования.
Второй импульс, поступивший на вход триггера 7, опрокидывает его в ,состояние единицы. При этом счетчик СТО и СТ1 первого программируемого, таймера 13 прекращают работу, а счет осуществляется счетчиками СТ2 таймера 13 и СТО таймера 14. В с.четчиках СТО и СТ1 оказываются зафиксированными числа
N Г , fc
N 1. f.
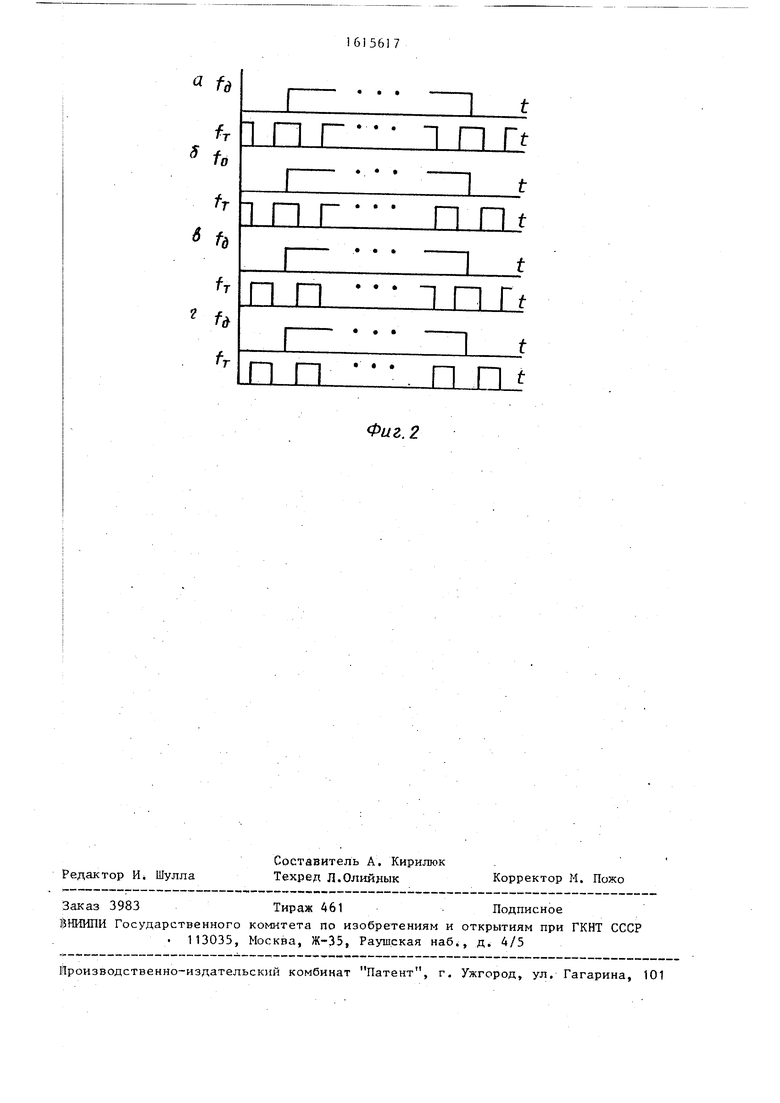
Эти числа могут быть равны или различаться на 1,0. Это зависит от / моментов времени, в которые начат и окончен процесс квантования (фиг.2). Перепад напряжения из нуля в единицу на втором входе программируемого контроллера 16 прерьшаний заставляет центральный процессор 19 выйти из режима ожидания и записать в ячейки блока 20 оперативной памяти значения 1 и Ng, установив метки, означающие, что данные значения характеризуют период сети. Перегрузив счетчики, центральный процессор 19 возвращается в режим ожидания.
Второй импульс, поступивший на вход триггера 6, переводит его в состояние нуля. При этом счетчики СТ1 и СТ2 второго программируемого таймера 14 прекращают работу и в них оказываются зафиксиров;ишь ми числа
3
4 т/ ЭПерепад напряжения на третьем Ьход контроллера 16 прерываний выводит центральный процессор 19 из режима ожидания прерывания и заставляет его записать зарегистрированные значения в следующие две ячейки блока 20 оперативной памяти.Перезагрузив счетчш и .центральный процессор 19 возвращается в режим ожидания прерывания.
Третий импульс, поступивший на тактовый вход С триггера 7, снова устанавливает его в состояние логического нуля. При этом начинается работа счетчиков СТО и СТ1 программируемого таймера 13, а в счетчиках СТ2 тайме15617 .6
pa 13 и СТО таймера 14 фиксируются числа
,-fr/f.l
6 T/fc.
Перепад напряжения из нуля в единицу на нулевом входе контроллера 16 прерываний заставляет центральный процессор 19 переслать зафиксированные -значения в следующие две ячейки блока 20 оперативной памяти, Пере- . загрузив счетчики, центральный про- цессор 19 возвращается в режим ожи- : Дания,
Третий импульс, поступивший на тактовый вход С триггера 6, снова переводит его в состояние логической единицы. При этом начинают работать счетчики СТО и СТ1 третьего программируемого таймера 15. а в счетчиках СТ1 и СТ2 второго программируемого таймера оказываются зафиксированными
TTTJi тт «-1
0
5
числа
30
NT f./fg;
в fr/f Перепад напряжения из нуля в еди- . ницу на нулевом входе программируемо- .го контроллера 16 прерываний выводит центральный процессор 19 из режима ожидания. Следуя этому сигналу,
центральный процессор 19 пересыпает зарегистрированные значения в ячейки блока 20 оперативной памяти. Пере загрузив счетчики, центральный про- 0 цессор 19 возвращается в режим ожи- .Дания прерьшания.
Процесс регистрации продолжается до тех пор, пока вся область памяти 45 отведенная под регистрируемые значения, не заполнится. После этого цент- . . ральный процессор 19 подает команду
Запрещение прерываний и начинает математическую обработку результатов. . 0
Взяв попарно числа, соответствующие одному и тому же периоду, центральный процессор 19 сравнивает их и в случае, если они не равны, к млад- 5 шему из них добавляется 0,5. После этого значения обрабатываются таким образом, что одному значению периода сети соответствует несколько значений периода ротора
B..-l ::TuL.ioo% zMiLi-IiNci
I ZNp;-Nc
|- ,
i+1,... значения соответствуют -му значению периода сети и подставляются в указанные выражения до тех пор, пока не встретится (j+1)-e начение периода сети.
Пересчитанные значения выводятся tа устройство отображения информа- 1,ии в виде таблицы, графиков и т.д.
ри необходимости снятия характерис
несколько раз, например при на(юре статистических данных, процесс )егистрации повторяется с начальной
остановки ротора.
bop мула изобретения
Устройство для измерения сколь- кения, содержаи(ее объект контроля, патчик скорости вращения, форми- Ьователь, два триггера, программи- |руемый таймер, программируемый конт- роллер прерывания, параллельный .интерфейс, генератор импульсов и микроэвм, включающую в себя центральный процессор, блок оперативной |памяти, устройство отображения ин- ;формации и системный канал, о т - личающеес я тем, что, с целью повышения точности измерения, до ;пОлнительно введены два программиру- |емых таймера, четыре инвертора, шаго ;вый двигатель и редуктор, причем : клеммы подключения объекта контроля ;к электрической сети соединены с входом формирователя, вал объекта контроля механически связан с датчи- ком угловой скорости, а через редуктор - с валом шагового двигателя тактовый вход первого триггера подключен к выходу формирователя, прямой вьЕкод - к разрешающим входам вт рого счетчика первого программируе
0
5
0
0 5 40 дз
мого таймера и нулевого счетчика второго программируемого таймера и к второму входу программируемого контроллера прерываний, а инверсный - к разрешающим входам нулевого и первого счетчиков первого программируемого таймера, к первому входу программируемого контроллера прерываний, а также к информационному входу этого же триггера, тактовый вход второго триггера соединен с информационным вьгходом датчика угловой скорости, прямой выход - с разрешающими входами нулевого и первого счетчиков третьего программируемого таймера и с нулевым входом программируемого контроллера прерываний, а инверсный - с разрешающими входами первого и второго счетчиков второго программируемого, таймера, с третьим входом программируемого контроллера прерываний и с информационным входом этого же триггера, выход генератора импульсов подключен к входам первого, второго, третьего и четвертого инверторов, а также к тактовым входам нулевого и второго счетчиков первого программируемого таймера, первого счетчика второго программируемого таймера, нулевого счетчика третьего программируемого таймера, выход первого инвертора соединен с тактовым входом первого счетчика первого программируемого таймера, второго - с тактовым входом нулевого счетчика второго программируемого таймера, третьего - с тактовым входом второго счетчика второго программируемого - . таймера, четвертого - с тактовым входом первого счетчика третьего программируемого таймера, канал А параллельного интерфейса подключен к сигнальному выходу Начало отсчета датчика угловой скорости, канал В - к шаговому двигателю.
Фиг, 2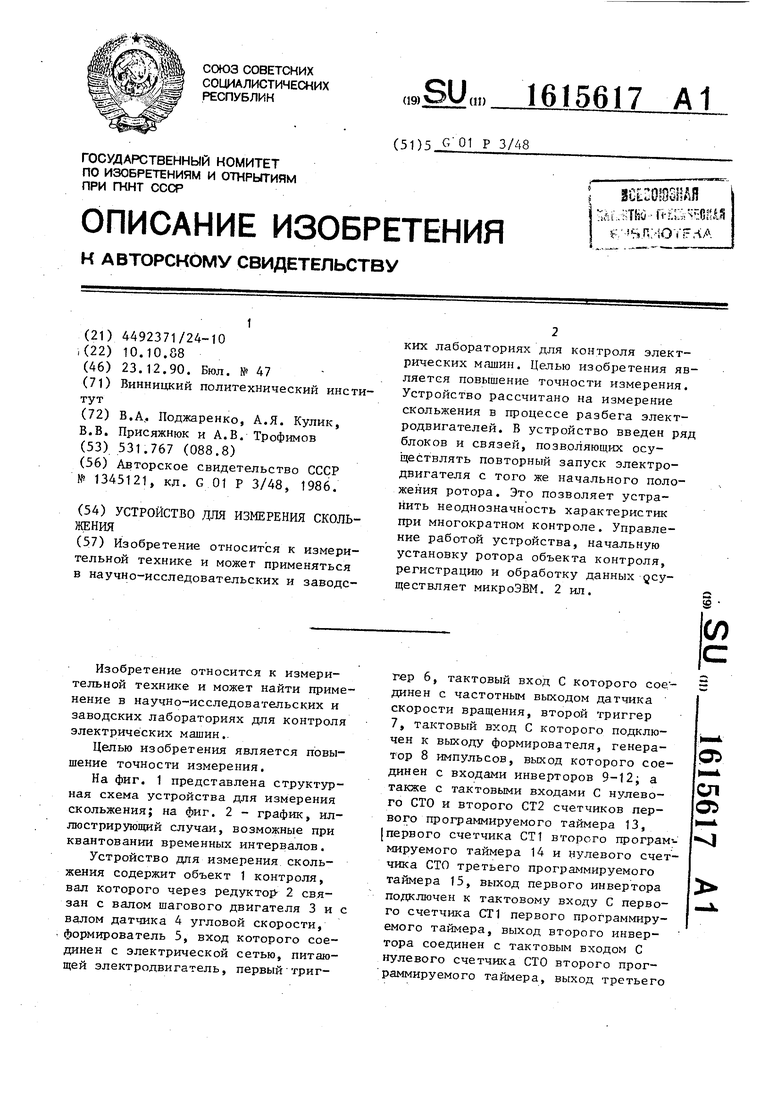

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения разности частот вращения | 1986 |
|
SU1613959A1 |
| Устройство для измерения параметров вращения | 1986 |
|
SU1613960A1 |
| Устройство для измерения скольжения | 1988 |
|
SU1658098A1 |
| Устройство для измерения скольжения асинхронных электродвигателей | 1986 |
|
SU1345121A1 |
| Учебная установка по физике | 1991 |
|
SU1831716A3 |
| Устройство для измерения скорости вращения | 1984 |
|
SU1262385A1 |
| Многоканальное устройство управления шаговым двигателем | 1990 |
|
SU1789970A1 |
| РЕЗЕРВИРОВАННАЯ СИСТЕМА | 1991 |
|
RU2010315C1 |
| Устройство контроля и управления технологическим комплексом для намотки изделий | 1989 |
|
SU1661721A1 |
| КОНТРОЛЛЕР КАНАЛА МЕЖБЛОЧНОГО ОБМЕНА | 2007 |
|
RU2345407C1 |
Изобретение относится к измерительной технике и может применяться в научно-исследовательских и заводских лабораториях для контроля электрических машин. Целью изобретения является повышение точности измерения. Устройство рассчитано на измерение скольжения в процессе разбега электродвигателей. В устройство введен ряд блоков и связей, позволяющих осуществлять повторный запуск электродвигателя с того же начального положения ротора. Это позволяет устранить неоднозначность характеристик при многократном контроле. Управление работой устройства, начальную установку ротора объекта контроля, регистрацию и обработку данных осуществляет микро-ЭВМ. 2 ил.
| Устройство для измерения скольжения асинхронных электродвигателей | 1986 |
|
SU1345121A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
