Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах управления автоматизированными технологическими комплексами для производства намоточных изделий.
Цель изобретения - расширение области применения устройства.
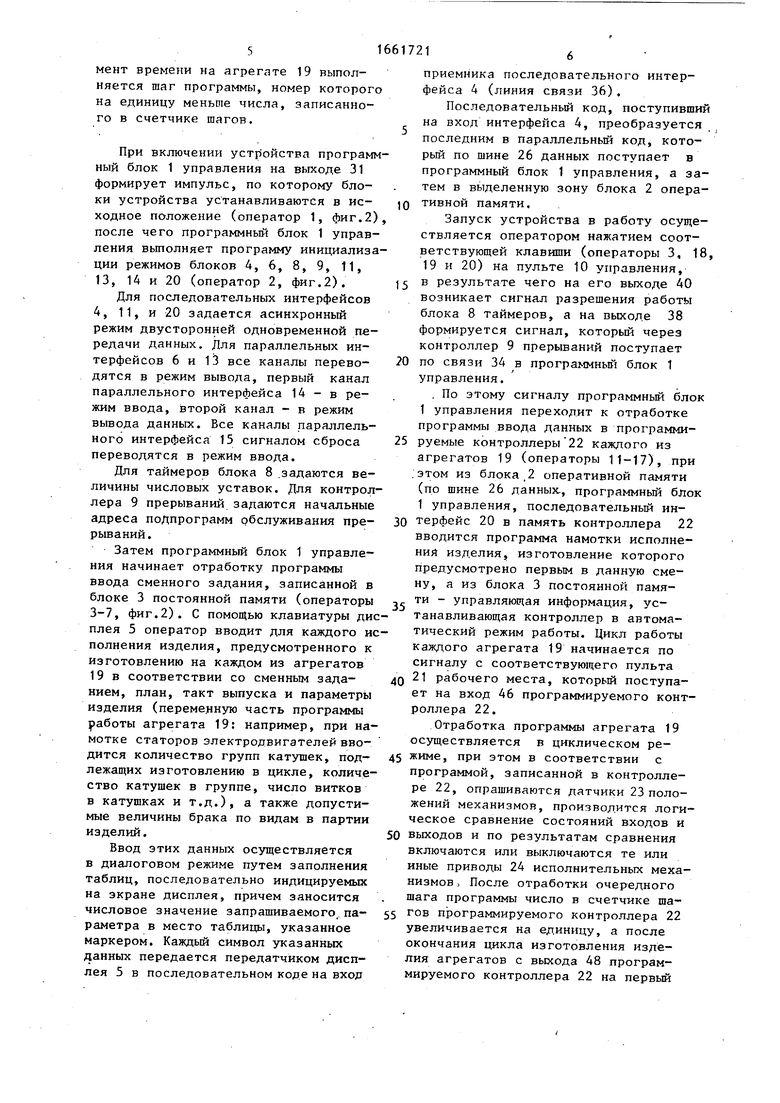
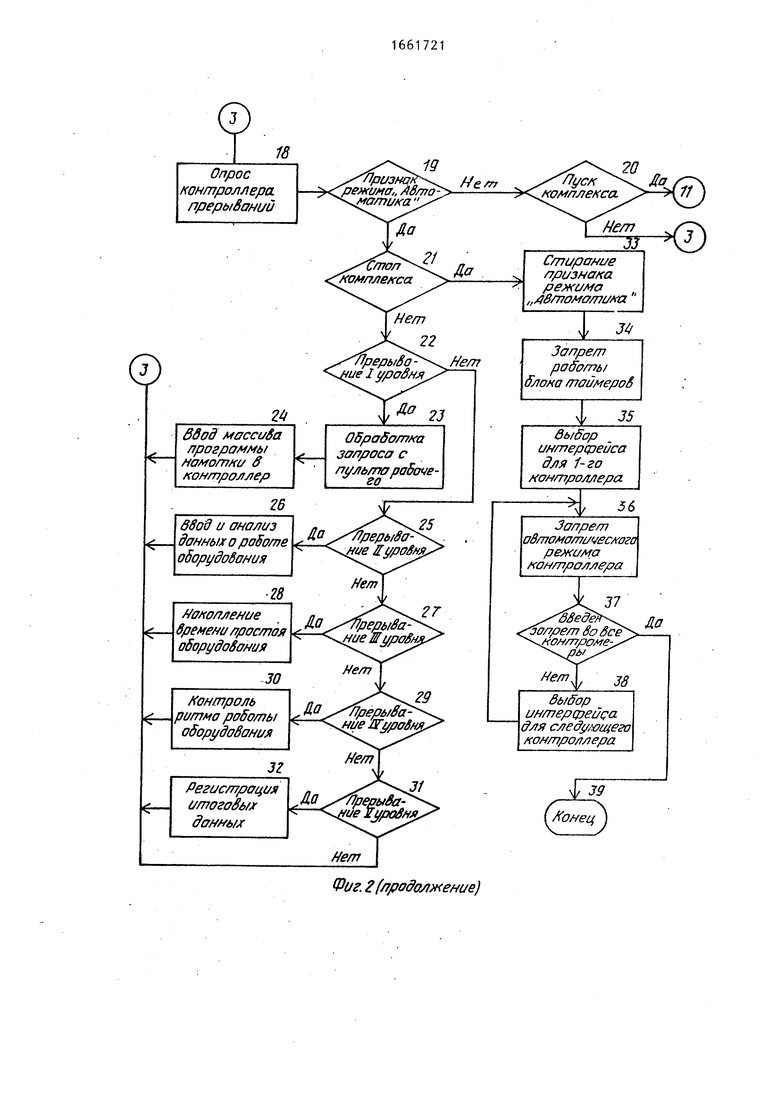
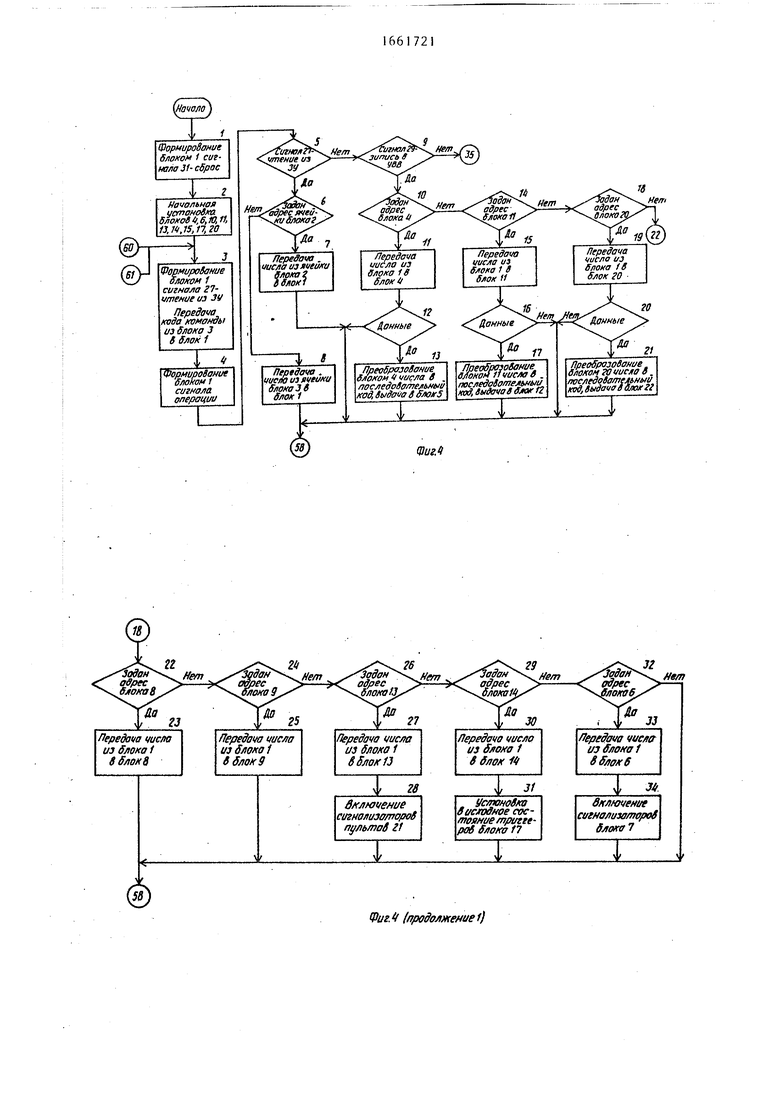
На фиг. 1 приведена функциональная схема устройства; на фиг. 2 - алгоритм функционирования устройств
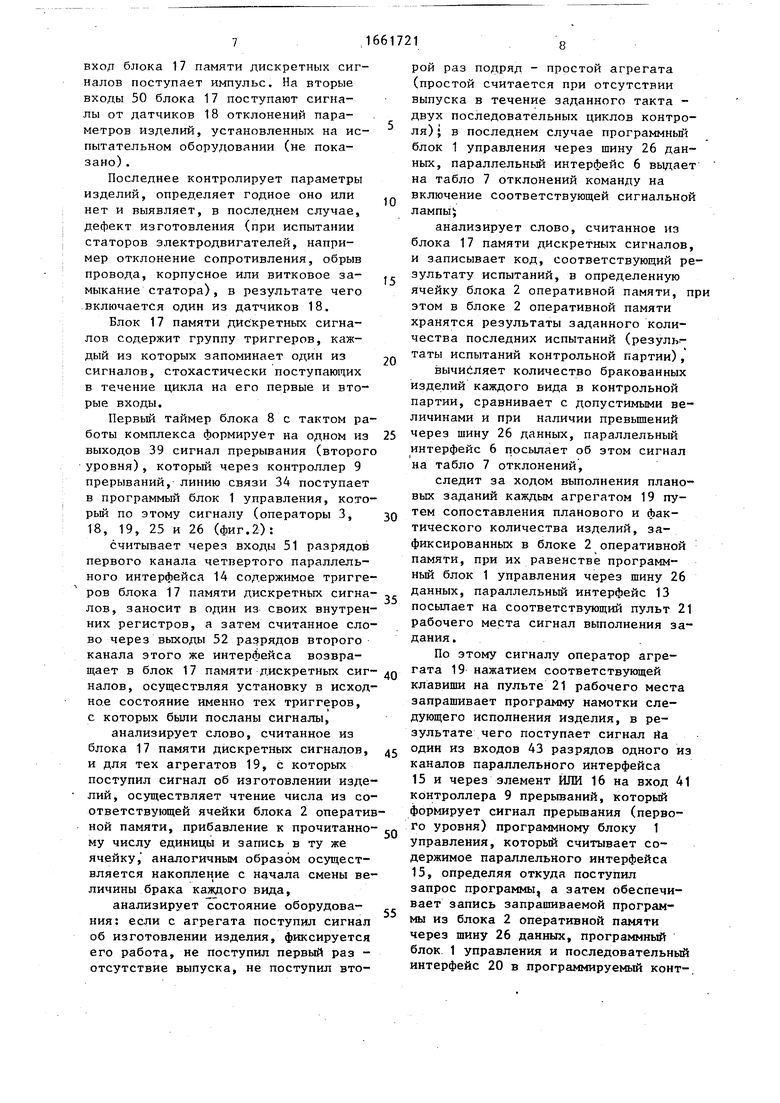
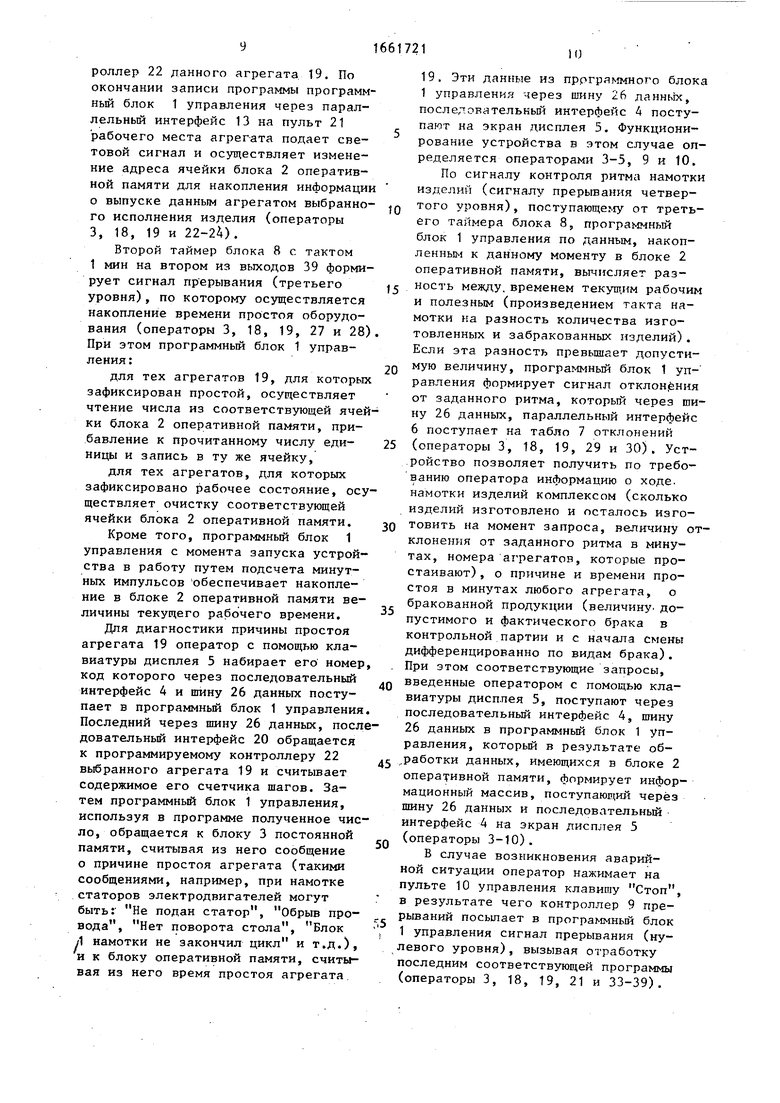
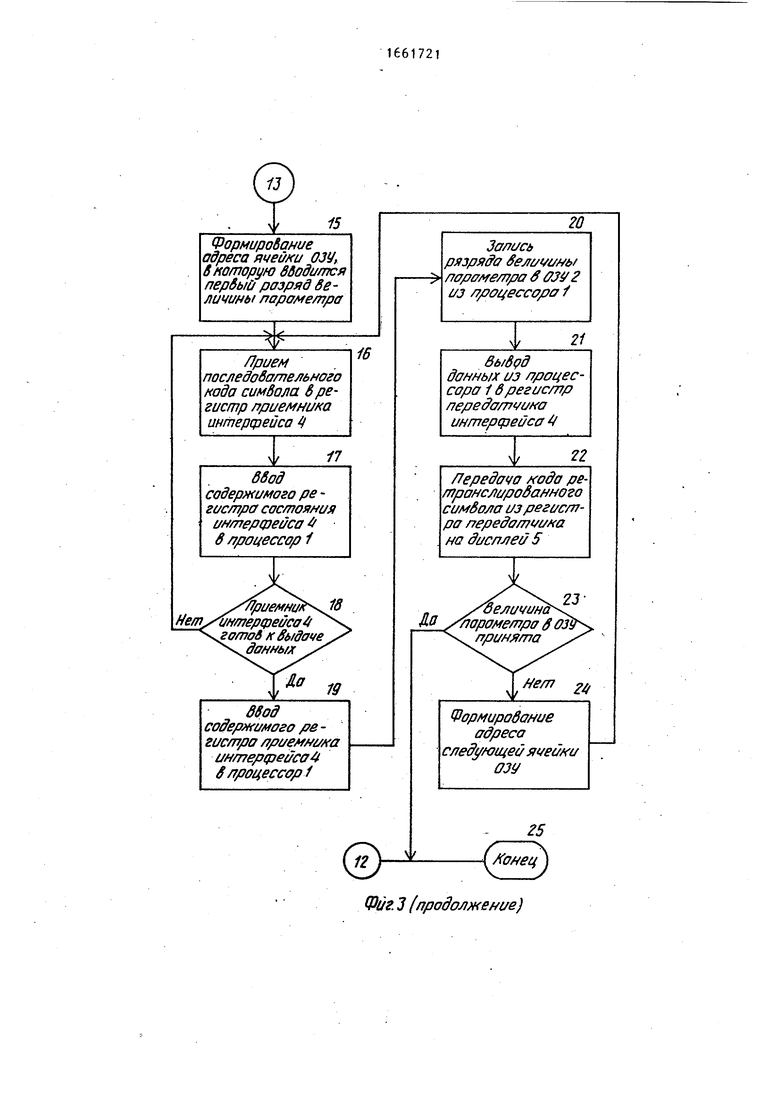
ва при решении задач контроля и управления технологическим комплексом; на фиг. 3 - алгоритм функционирования блоков устройства при вводе данных; на фиг. 4 - алгоритм обработки и обмена информацией между блоками устройства; на фиг. 5 - пример конкретного технического решения программного блока 1 управления; на фиг. 6 - то же, последовательного интерфейса 4; на фиг. 7 - то же,
лока 8 таймеров; на фиг. 8 - то же, онтроллера 9 прерываний; на фиг.9- о же, пульта 10 управления; на иг. 10 - то же, параллельных интерейсов 13-15; на фиг. 11 - то же, блока 17 памяти дискретных сигналов; на фиг. 12 - то же, пульта 21 рабочего места; на фиг. 13 - то же, программируемого контроллера 22; на иг. 14 - алгоритм функционирования программируемого логического контроллера.
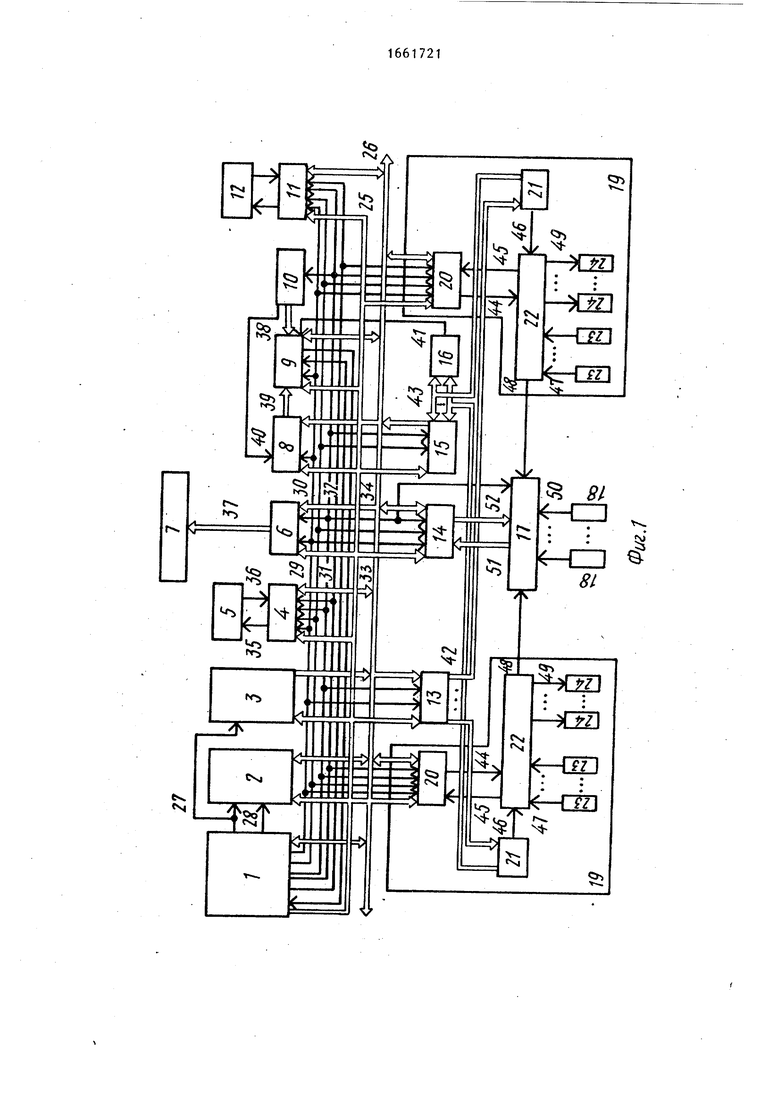
Устройство (фиг.1) содержит программный блок 1 управления, блок 2 оперативной памяти, блок 3 постоянной памяти, первый последовательный интерфейс 4, дисплей 5, третий параллельный интерфейс 6, табло 7 отклонений, блок 8 таймеров,.контроллер 9 прерываний, пульт 10 управления, второй последовательный интерфейс 11, блок 12 печати, второй 13, четвертый 14 и первый 15 параллельные интерфейсы, элемент ИЛИ 16, блок 17 памяти дискретных сигналов, группу датчиков 18 отклонений и для каждого агрегата 19 технологического комплекса - последовательный интерфейс 20, пульт 21 рабочего места, программируемый контроллер 22, группу датчиков 23 положений механизмов и группу привода 24 исполнительных механизмов, шину 25 адреса и шину 26 данных (по- зициями 27-52 обозначены связи между блоками).
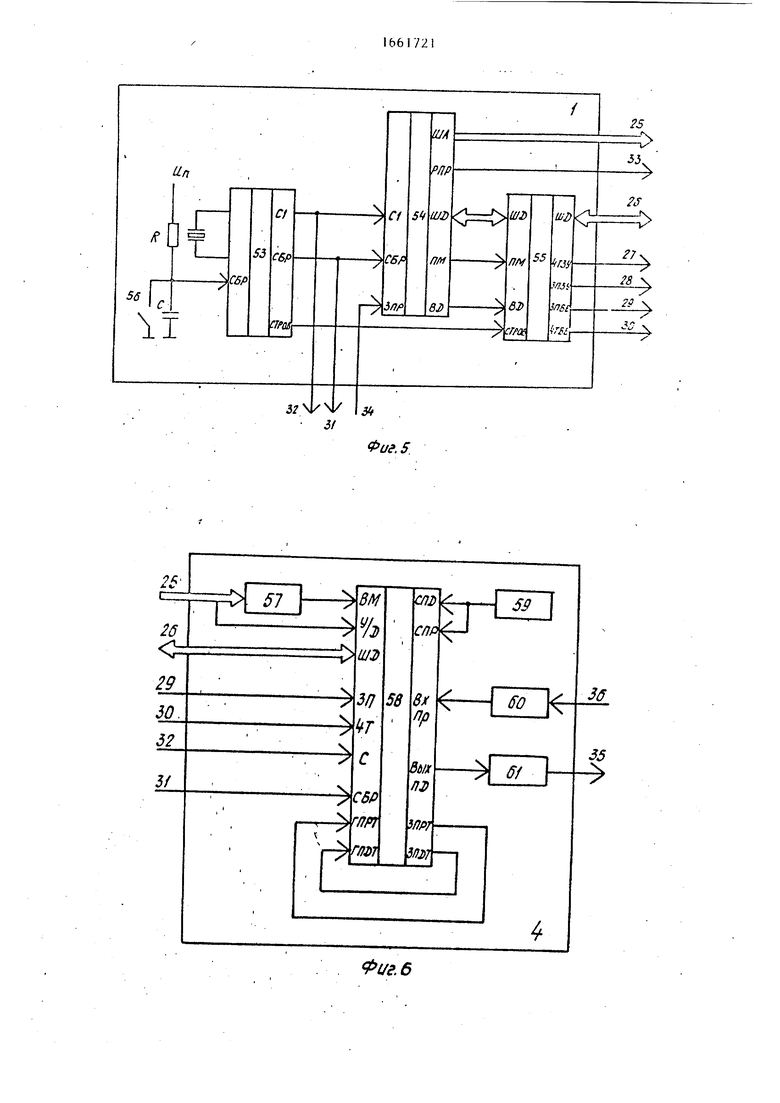
| Программный блок 1 управления (фиг.5) содержит генератор 53 тактовых импульсов, центральный процессорный элемент 54, системный контроллер 55 и кнопку 56 сброса.
Последовательный интерфейс 4 (фиг.6) содержит дешифратор 57 адреса, интерфейс 58 связи, генератор 59 синхроимпульсов передатчика и приемника, входной 60 и выходной 61 усилители каналов.
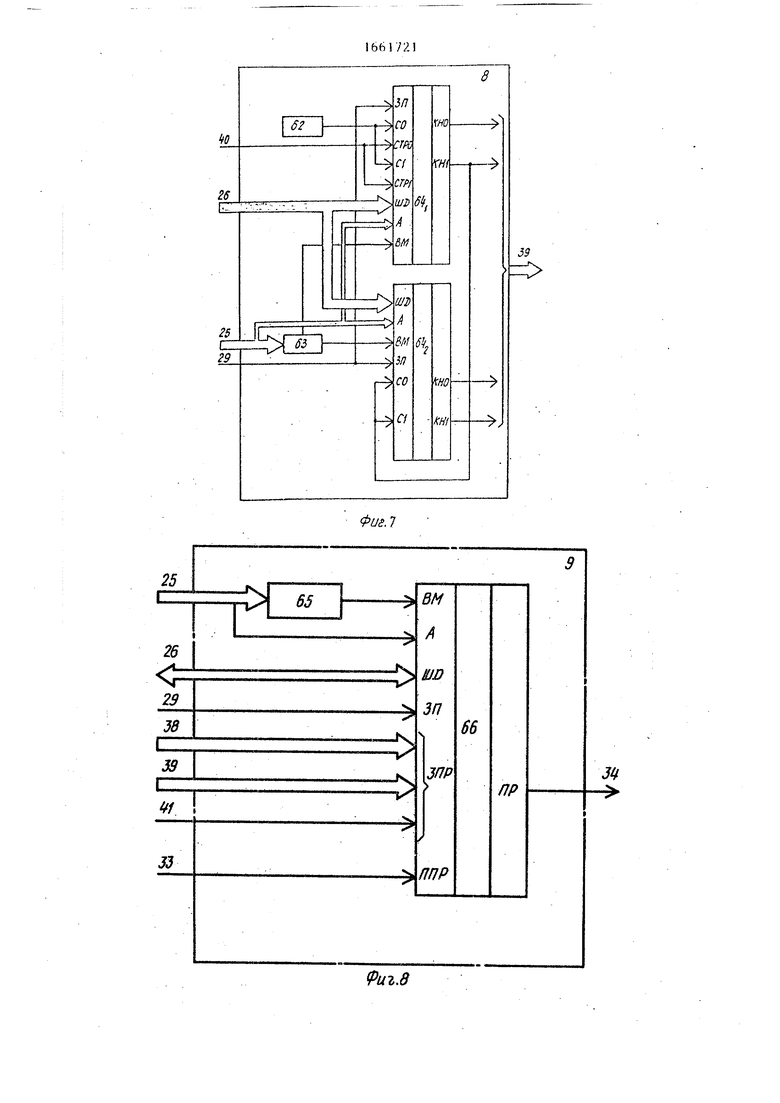
Блок 8 таймеров (фиг.7) содержит генератор 62 секундных импульсов, дешифратор 63 адреса и программируемые таймеры 64 и 64 Ј.
Контроллер 9 прерываний (фиг.8) содержит дешифратор 65 адреса и программируемый контроллер 66 прерываний.
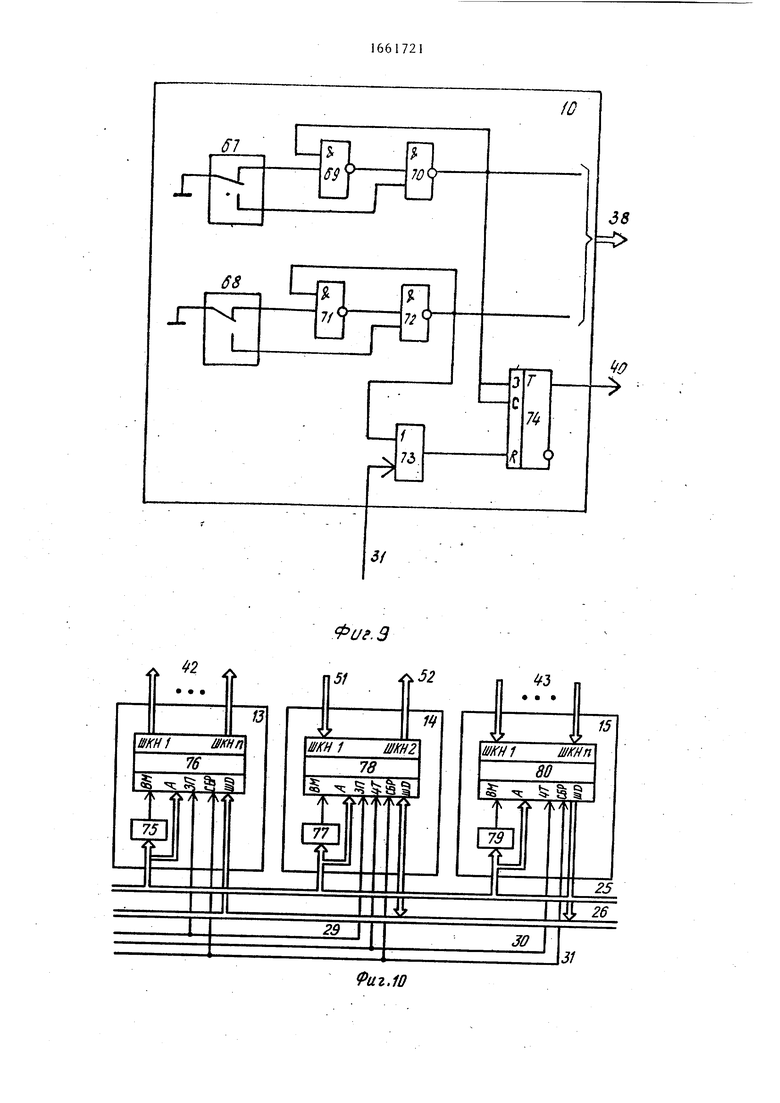
Пульт 10 управления (фиг.9) содержит кнопку 67 пуска, кнопку 68 ос танова устройства, первый 69 - чет
0
5
0
5
0
5
0
5
вертый 72 элементы И-НЕ, элемент ИЛИ 73 и триггер 74.
Параллельный интерфейс 13 (фиг.10) содержит дешифратор 75 адреса и интерфейс 76 периферийных устройств. Параллельный интерфейс 14 (фиг.10) содержит дешифратор 77 адреса и интерфейс 78 периферийных устройств. Параллельный интерфейс 15 (фиг.10) содержит дешифратор 79 адреса и интерфейс 80 периферийных устройств.
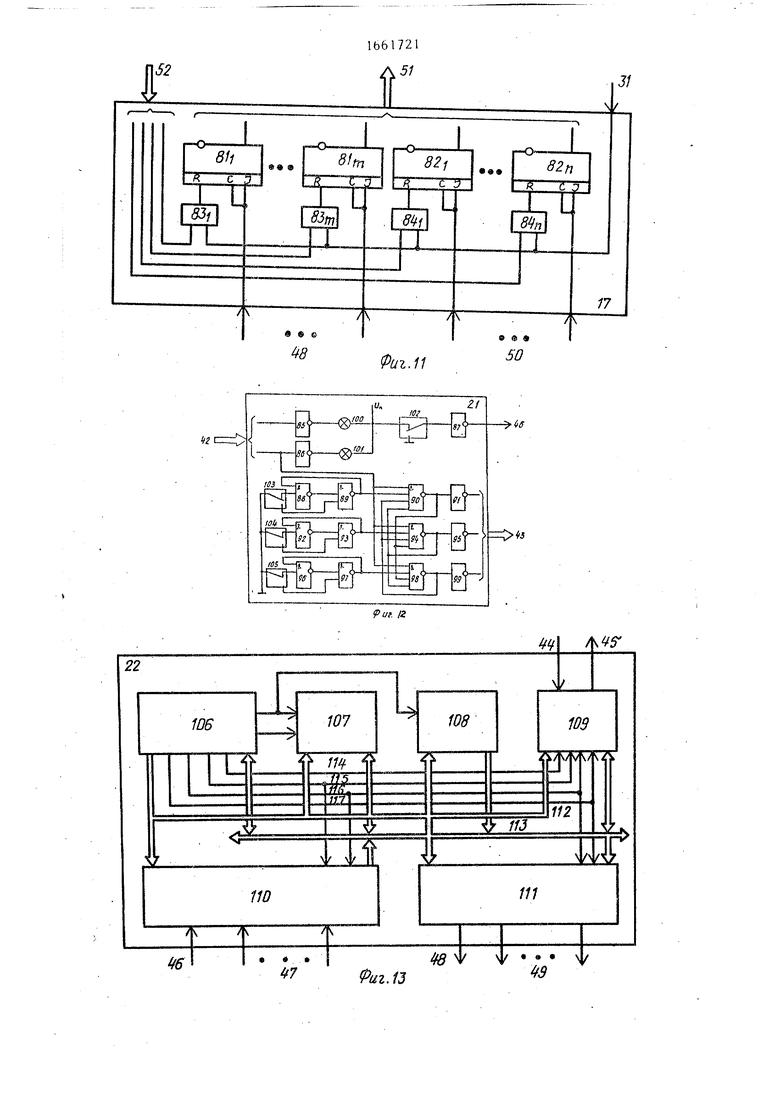
Блок 17 памяти дискретных сигналов (фиг.11) содержит первую 81,, ..., 81т, и вторую 824,..., 82п группы триггеров и первую 83,..., вторую 84,(,..., 84р, группы элементов ИЛИ.
Пульт 21 рабочего места (фиг.12) содержит первый 85 и второй 86 усилители, первый 87 элемент НЕ, первый 88 - третий 90 элементы И-НЕ, второй 91 элемент НЕ, четвертый 92 - шестой 94 элементы И-НЕ, третий 95 элемент НЕ, седьмой 96 - девятый 98 элементы И-НЕ, четвертый 99 элемент НЕ, первую 100 и вторую 101 лампы, первую 102 - четвертую 105 кнопки.
Программируемый контроллер 22 (фиг.13) содержит программный блок
106управления, блоки оперативной
107и постоянной 108 памяти, последовательный интерфейс 109, первый 110 и второй 111 параллельные интерфейсы.
Устройство работает следующим образом.
В блок 3 постоянной памяти записываются все программы контроля и управления устройством. В память программируемых логических контроллеров 22 записываются программы управления перемещением механизмов каждого агрегата 19. Каждой программой предусматривается выполнение алгоритма управления соответствующим агрегатом 19 последовательном по шагам, при этом в зависимости от комбинации сигналов датчиков 23 положений механизмов, установленных на агрегате 19, обеспечивается выдача необходимых команд включения , приводов 24 исполнительных механизмов. Кроме того, в каждой программе организован счетчик шагов, содержимое которого инкриминируется после отработки очередного шага программы. Таким образом, в каждый моS1661721
мент времени на агрегате 19 выполняется шаг программы, номер которого на единицу меньше числа, записанного в счетчике шагов.
При включении устройства программный блок 1 управления на выходе 31 формирует импульс, по которому блоки устройства устанавливаются в исходное положение (оператор 1, фиг.2) после чего программный блок 1 управления выполняет программу инициализации режимов блоков 4, 6, 8, 9, 11, 13, 14 и 20 (оператор 2, фиг.2).
Для последовательных интерфейсов 4, 11, и 20 задается асинхронный режим двусторонней одновременной передачи данных. Для параллельных интерфейсов 6 и 13 все каналы переводятся в режим вывода, первый канал параллельного интерфейса 14 - в режим ввода, второй канал - в режим вывода данных. Все каналы параллельного интерфейса 15 сигналом сброса переводятся в режим ввода.
Для таймеров блока 8 задаются величины числовых уставок. Для контроллера 9 прерываний задаются начальные адреса подпрограмм обслуживания прерываний.
Затем программный блок 1 управления начинает отработку программы ввода сменного задания, записанной в блоке 3 постоянной памяти (операторы 3-7, фиг.2). С помощью клавиатуры диплея 5 оператор вводит для каждого исполнения изделия, предусмотренного к изготовлению на каждом из агрегатов 19 в соответствии со сменным заданием, план, такт выпуска и параметры изделия (переменную часть программы работы агрегата 19: например, при намотке статоров электродвигателей вводится количество групп катушек, подлежащих изготовлению в цикле, количество катушек в группе, число витков в катушках и т.д.), а также допустимые величины брака по видам в партии изделий.
Ввод этих данных осуществляется в диалоговом режиме путем заполнения таблиц, последовательно индицируемых на экране дисплея, причем заносится числовое значение запрашиваемого параметра в место таблицы, указанное маркером. Каждый символ указанных данных передается передатчиком дисплея 5 в последовательном коде на вход
0
5
0
приемника последовательного интерфейса 4 (линия связи 36).
Последовательный код, поступивший на вход интерфейса 4, преобразуется последним в параллельный код, который по шине 26 данных поступает в программный блок 1 управления, а затем в выделенную зону блока 2 оперативной памяти.
Запуск устройства в работу осуществляется оператором нажатием соответствующей клавиши (операторы 3, 18, 19 и 20) на пульте 10 управления, в результате чего на его выходе 40 возникает сигнал разрешения работы блока 8 таймеров, а на выходе 38 формируется сигнал, который через контроллер 9 прерываний поступает по связи 34 в программный блок 1 управления.
По этому сигналу программный блок 1 управления переходит к отработке программы ввода данных в программи- 5 руемые контроллеры 22 каждого из агрегатов 19 (операторы 11-17), при этом из блока.2 оперативной памяти (по шине 26 данных, программный блок 1 управления, последовательный ин- 0 терфейс 20 в память контроллера 22 вводится программа намотки исполнения изделия, изготовление которого предусмотрено первым в данную смену, а из блока 3 постоянной памяти - управляющая информация, устанавливающая контроллер в автоматический режим работы. Цикл работы каждого агрегата 19 начинается по сигналу с соответствующего пульта 21 рабочего места, который поступает на вход 46 программируемого контроллера 22.
Отработка программы агрегата 19 осуществляется в циклическом ре- 5 жиме, при этом в соответствии с программой, записанной в контроллере 22, опрашиваются датчики 23 положений механизмов, производится логическое сравнение состояний входов и 0 выходов и по результатам сравнения включаются или выключаются те или иные приводы 24 исполнительных механизмов , После отработки очередного шага программы число в счетчике ша- 5 гов программируемого контроллера 22 увеличивается на единицу, а после окончания цикла изготовления изделия агрегатов с выхода 48 программируемого контроллера 22 на первый
5
0
вход блока 17 памяти дискретных сигналов поступает импульс. На вторые входы 50 блока 17 поступают сигналы от датчиков 18 отклонений параметров изделий, установленных на испытательном оборудовании (не показано) .
Последнее контролирует параметры изделий, определяет годное оно или нет и выявляет, в последнем случае, дефект изготовления (при испытании статоров электродвигателей, например отклонение сопротивления, обрыв провода, корпусное или витковое замыкание статора), в результате чего включается один из датчиков 18.
Блок 17 памяти дискретных сигналов содержит группу триггеров, каждый из которых запоминает один из сигналов, стохастически поступающих в течение цикла на его первые и вторые входы.
Первый таймер блока 8 с тактом работы комплекса формирует на одном из выходов 39 сигнал прерывания (второго уровня), который через контроллер 9 прерываний, линию связи 34 поступает в программый блок 1 управления, который по этому сигналу (операторы 3, 18, 19, 25 и 26 (фиг.2):
считывает через входы 51 разрядов первого канала четвертого параллельного интерфейса 14 содержимое триггеров блока 17 памяти дискретных сигналов, заносит в один из своих внутренних регистров, а затем считанное слово через выходы 52 разрядов второго канала этого же интерфейса возвращает в блок 17 памяти дискретных сигналов, осуществляя установку в исходное состояние именно тех триггеров, с которых были посланы сигналы,
анализирует слово, считанное из блока 17 памяти дискретных сигналов, и для тех агрегатов 19, с которых поступил сигнал об изготовлении изделий, осуществляет чтение числа из со- ответствующей ячейки блока 2 оператив1 ной памяти, прибавление к прочитанному числу единицы и запись в ту же ячейку, аналогичным образом осуществляется накопление с начала смены величины брака каждого вида,
анализирует состояние оборудования: если с агрегата поступил сигнал об изготовлении изделия, фиксируется его работа, не поступил первый раз - отсутствие выпуска, не поступил вто
0
5
0
5
0
5
0
5
рой раз подряд - простой агрегата (простой считается при отсутствии выпуска в течение заданного такта - двух последовательных циклов контроля) в последнем случае программный блок 1 управления через шину 26 данных, параллельный интерфейс 6 выдает на табло 7 отклонений команду на включение соответствующей сигнальной лампы;;
анализирует слово, считанное из блока 17 памяти дискретных сигналов, и записывает код, соответствующий результату испытаний, в определенную ячейку блока 2 оперативной памяти, при этом в блоке 2 оперативной памяти хранятся результаты заданного количества последних испытаний (результаты испытаний контрольной партии),
вычисляет количество бракованных изделий каждого вида в контрольной партии, сравнивает с допустимыми величинами и при наличии превышений через шину 26 данных, параллельный интерфейс 6 посыпает об этом сигнал на табло 7 отклонений,
следит за ходом выполнения плановых заданий каждым агрегатом 19 путем сопоставления планового и фактического количества изделий, зафиксированных в блоке 2 оперативной памяти, при их равенстве программный блок 1 управления через шину 26 данных, параллельный интерфейс 13 посылает на соответствующий пульт 21 рабочего места сигнал выполнения задания .
По этому сигналу оператор агрегата 19 нажатием соответствующей клавиши на пульте 21 рабочего места запрашивает программу намотки следующего исполнения изделия, в результате чего поступает сигнал йа один из входов 43 разрядов одного из каналов параллельного интерфейса 15 и через элемент ИЛИ 16 на вход 41 контроллера 9 прерываний, который формирует сигнал прерывания (первого уровня) программному блоку 1 управления, который считывает содержимое параллельного интерфейса 15, определяя откуда поступил запрос программы, а затем обеспечивает запись запрашиваемой программы из блока 2 оперативной памяти через шину 26 данных, программный блок 1 управления и последовательный интерфейс 20 в программируемый контроллер 22 данного агрегата 19. По окончании записи программы программный блок 1 управления через параллельный интерфейс 13 на пульт 21 рабочего места агрегата подает световой сигнал и осуществляет изменение адреса ячейки блока 2 оперативной памяти для накопления информации
0выпуске данным агрегатом выбранного исполнения изделия (операторы
3, 18, 19 и 22-24).
Второй таймер блока 8 с. тактом
1мин на втором из выходов 39 формирует сигнал прерывания (третьего уровня), по которому осуществляется накопление времени простоя оборудования (операторы 3, 18, 19, 27 и 28) При этом программный блок 1 управления:
для тех агрегатов 19, для которых зафиксирован простой, осуществляет чтение числа из соответствующей ячейки блока 2 оперативной памяти, прибавление к прочитанному числу единицы и запись в ту же ячейку,
для тех агрегатов, для которых зафиксировано рабочее состояние, осуществляет очистку соответствующей ячейки блока 2 оперативной памяти.
Кроме того, программный блок 1 управления с момента запуска устройства в работу путем подсчета минутных импульсов обеспечивает накопление в блоке 2 оперативной памяти величины текущего рабочего времени.
Для диагностики причины простоя агрегата 19 оператор с помощью клавиатуры дисплея 5 набирает его номер код которого через последовательный интерфейс 4 и шину 26 данных поступает в программный блок 1 управления Последний через шину 26 данных, послдовательный интерфейс 20 обращается к программируемому контроллеру 22 выбранного агрегата 19 и считывает содержимое его счетчика шагов. Затем программный блок 1 управления, используя в программе полученное число, обращается к блоку 3 постоянной памяти, считывая из него сообщение о причине простоя агрегата (такими сообщениями, например, при намотке статоров электродвигателей могут быть: Не подан статор, Обрыв провода, Нет поворота стола, Блок г1 намотки не закончил цикл и т.д.), и к блоку оперативной памяти, считывая из него время простоя агрегата
o
5
0
5
0
5
0
5
0
5
19. Эти данные из программного блока 1 управления через шину 26 данных, последовательный интерфейс 4 поступают на экран дисплея 5. Функционирование устройства в этом случае определяется операторами 3-5, 9 и 10.
По сигналу контроля ритма намотки изделий (сигналу прерывания четвертого уровня), поступающему от третьего таймера блока 8, программный блок 1 управления по данным, накопленным к данному моменту в блоке 2 оперативной памяти, вычисляет разность между, временем текущим рабочим и полезным (произведением такта намотки на разность количества изготовленных и забракованных изделий). Если эта разность превышает допустимую величину, программный блок 1 уп- равления формирует сигнал отклонения от заданного ритма, который через шину 26 данных, параллельный интерфейс 6 поступает на табло 7 отклонений (операторы 3, 18, 19, 29 и 30). Устройство позволяет получить по требованию оператора информацию о ходе, намотки изделий комплексом (сколько изделий изготовлено и осталось изготовить на момент запроса, величину отклонения от заданного ритма в минутах, номера агрегатов, которые простаивают) , о причине и времени простоя в минутах любого агрегата, о бракованной продукции (величину, допустимого и фактического брака в контрольной партии и с начала смены дифференцированно по видам брака). При этом соответствующие запросы, введенные оператором с помощью клавиатуры дисплея 5, поступают через последовательный интерфейс 45 шину 26 данных в программный блок 1 управления, который в результате об- ,работки данных, имеющихся в блоке 2 оперативной памяти, формирует информационный массив, поступающий через шину 26 данных и последовательный интерфейс 4 на экран дисплея 5 (операторы 3-10).
В случае возникновения аварийной ситуации оператор нажимает на пульте 10 управления клавишу Стоп, в результате чего контроллер 9 прерываний посылает в программный блок 1 управления сигнал прерывания (нулевого уровня), вызывая отработку последним соответствующей программы (операторы 3, 18, 19, 21 и 33-39).
11 - 16
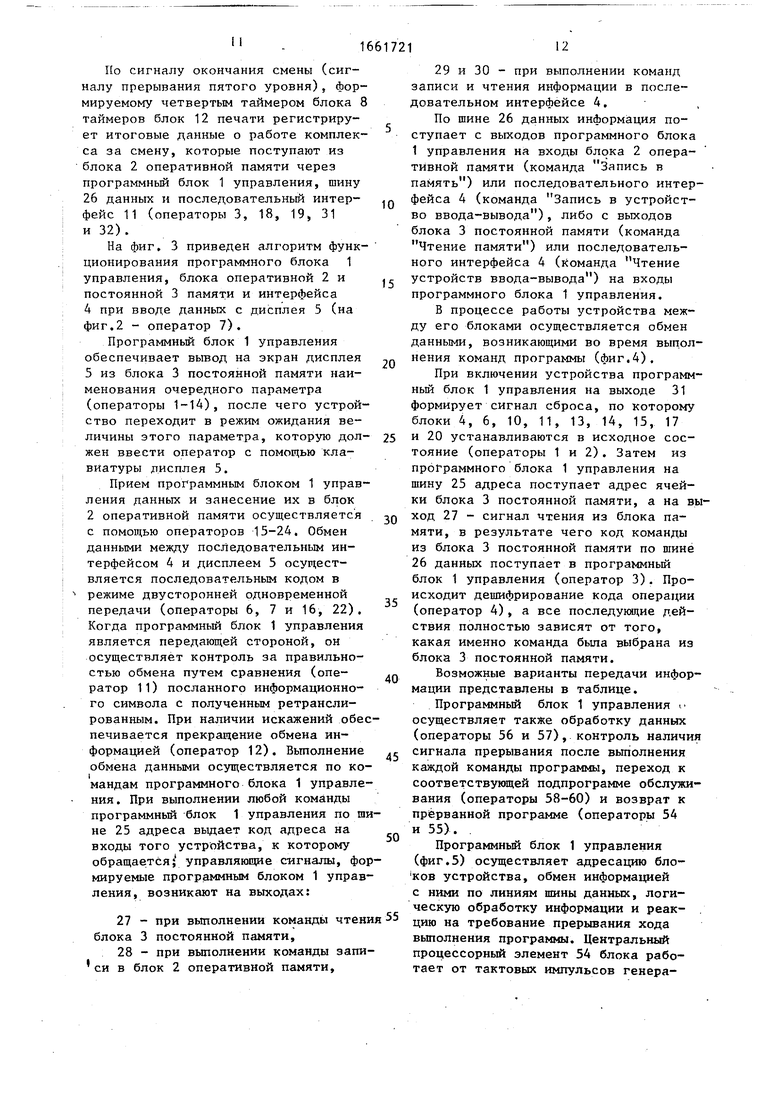
По сигналу окончания смены (сигналу прерывания пятого уровня), формируемому четвертым таймером блока 8 таймеров блок 12 печати регистрирует итоговые данные о работе комплекса за смену, которые поступают из блока 2 оперативной памяти через программный блок 1 управления, шину 26 данных и последовательный интерфейс 11 (операторы 3, 18, 19, 31 и 32).
На фиг, 3 приведен алгоритм функционирования программного блока 1 управления, блока оперативной 2 и постоянной 3 памяти и интерфейса
4при вводе данных с дисплея 5 (на фиг.2 - оператор 7).
Программный блок 1 управления обеспечивает вывод на экран дисплея
5из блока 3 постоянной памяти наименования очередного параметра (операторы 1-14), после чего устройство переходит в режим ожидания величины этого параметра, которую должен ввести оператор с помощью клавиатуры дисплея 5.
Прием программным блоком 1 управления данных и занесение их в блок 2 оперативной памяти осуществляется с помощью операторов 15-24. Обмен данными между последовательным интерфейсом 4 и дисплеем 5 осуществляется последовательным кодом в режиме двусторонней одновременной передачи (операторы 6, 7 и 16, 22). Когда программный блок 1 управления является передающей стороной, он осуществляет контроль за правильностью обмена путем сравнения (оператор 11) посланного информационного символа с полученным ретранслированным. При наличии искажений обеспечивается прекращение обмена информацией (оператор 12). Выполнение обмена данными осуществляется по командам программного блока 1 управления . При выполнении любой команды программный блок 1 управления по тине 25 адреса выдает код адреса на входы того устройства, к которому обращается; управляющие сигналы, формируемые программным блоком 1 управления, возникают на выходах:
ческую обработку информации и реак- 27 - при выполнении команды чтения 55 ЦШ) на требование прерывания хода
блока 3 постоянной памяти,
28 - при выполнении команды запи- си в блок 2 оперативной памяти,
выполнения программы. Центральный процессорный элемент 54 блока работает от тактовых импульсов генера
5
0
5
721
0
5
0
5
0
12
29 и 30 - при выполнении команд записи и чтения информации в последовательном интерфейсе 4.
По шине 26 данных информация поступает с выходов программного блока 1 управления на входы блока 2 оперативной памяти (команда Запись в память) или последовательного интерфейса 4 (команда Запись в устройство ввода-вывода), либо с выходов блока 3 постоянной памяти (команда Чтение памяти) или последовательного интерфейса 4 (команда Чтение устройств ввода-вывода) на входы программного блока 1 управления.
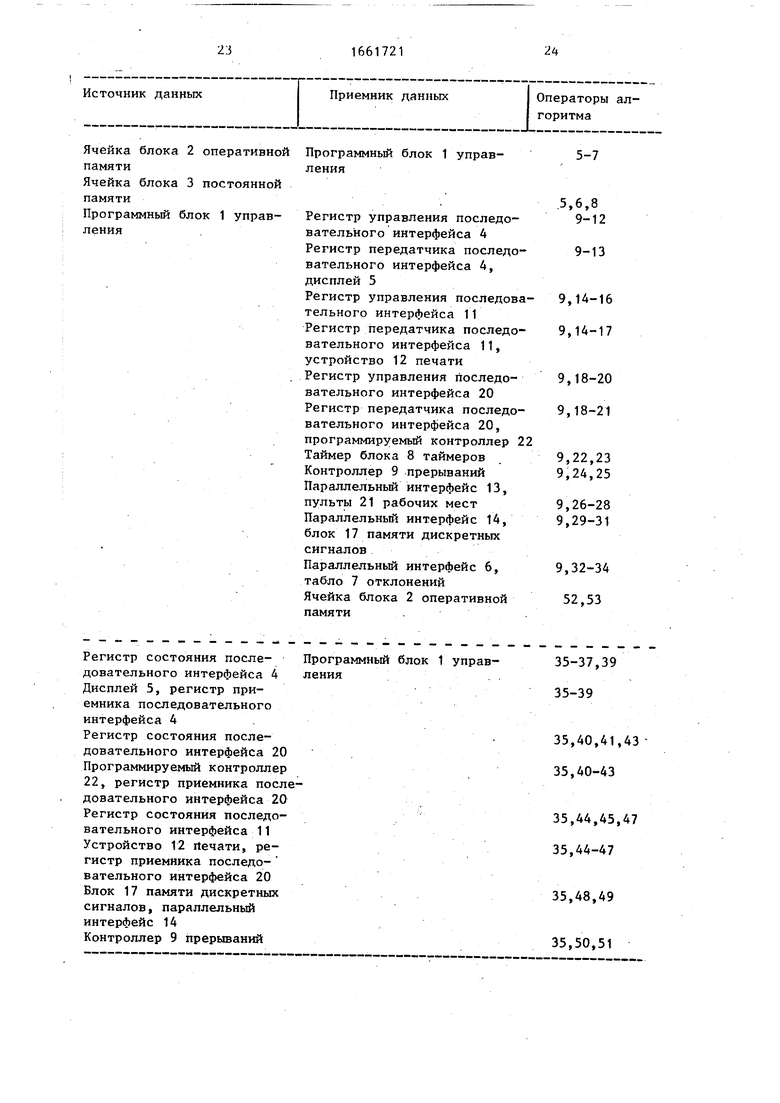
В процессе работы устройства между его блоками осуществляется обмен данными, возникающими во время выполнения команд программы (фиг.4).
При включении устройства программный блок 1 управления на выходе 31 формирует сигнал сброса, по которому блоки 4, 6, 10, 11, 13, 14, 15, 17 и 20 устанавливаются в исходное состояние (операторы 1 и 2). Затем из программного блока 1 управления на шину 25 адреса поступает адрес ячейки блока 3 постоянной памяти, а на выход 27 - сигнал чтения из блока памяти, в результате чего код команды из блока 3 постоянной памяти по шине 26 данных поступает в программный блок 1 управления (оператор 3). Происходит дешифрирование кода операции (оператор 4), а все последующие действия полностью зависят от того, какая именно команда была выбрана из блока 3 постоянной памяти.
Возможные варианты передачи информации представлены в таблице.
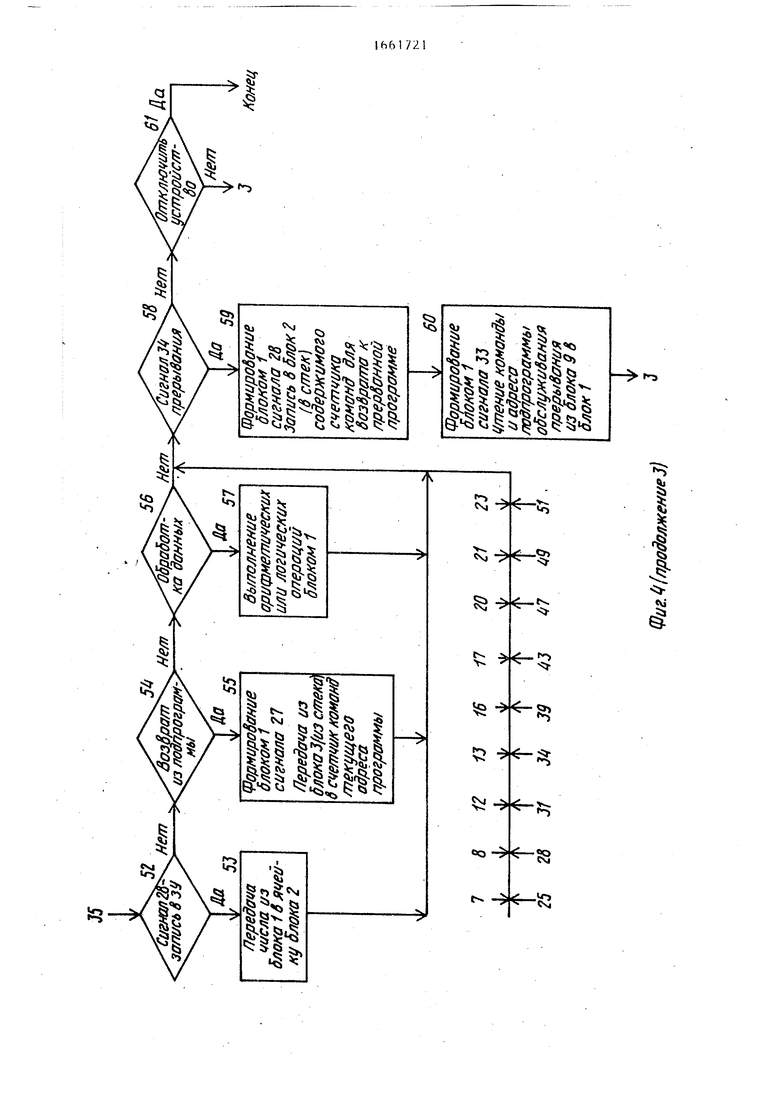
Программный блок 1 управления i осуществляет также обработку данных (операторы 56 и 57), контроль наличия сигнала прерывания после выполнения каждой команды программы, переход к соответствующей подпрограмме обслуживания (операторы 58-60) и возврат к прерванной программе (операторы 54 и 55).
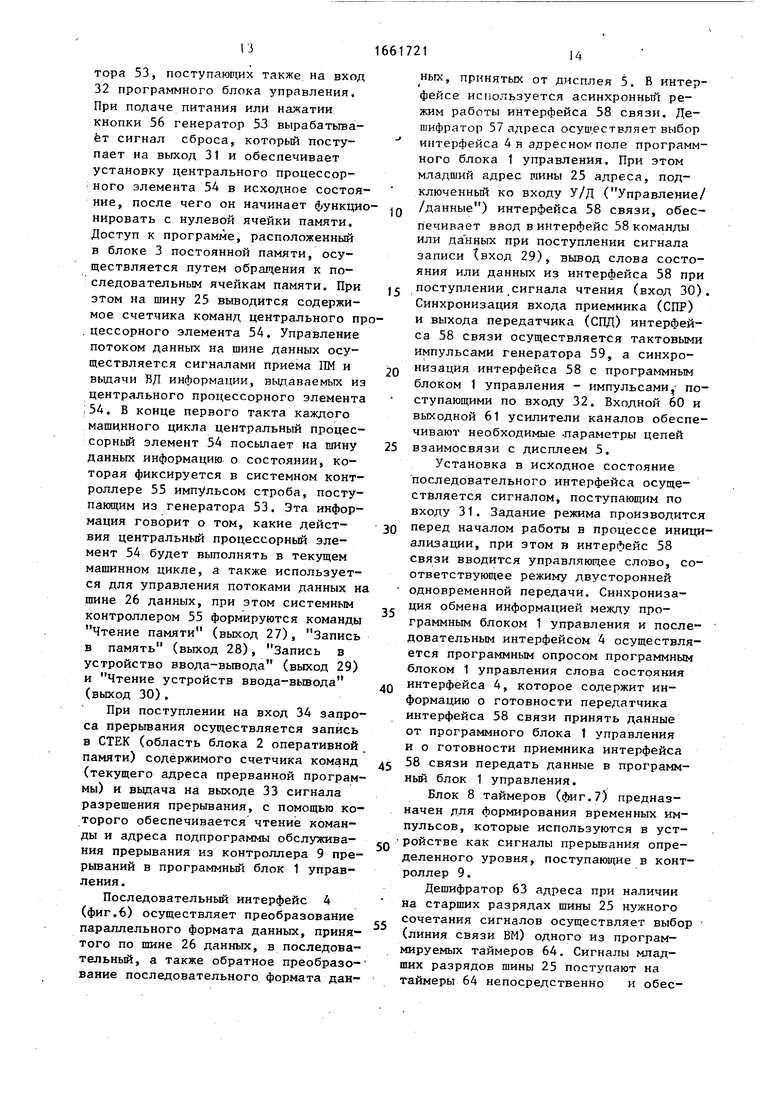
Программный блок 1 управления (фиг.5) осуществляет адресацию бло- ков устройства, обмен информацией с ними по линиям шины данных, логивыполнения программы. Центральный процессорный элемент 54 блока работает от тактовых импульсов генератора 53, поступающих также на вход 32 программного блока управления. При подаче питания или нажатии кнопки 56 генератор 53 вырабатывает сигнал сброса, который поступает на выход 31 и обеспечивает установку центрального процессорного элемента 54 в исходное состояние, после чего он начинает функционировать с нулевой ячейки памяти. Доступ к программе, расположенный в блоке 3 постоянной памяти, осуществляется путем обращения к последовательным ячейкам памяти. При этом на шину 25 выводится содержимое счетчика команд центрального про- цессорного элемента 54. Управление потоком данных на шине данных осуществляется сигналами приема ИМ и выдачи БД информации, выдаваемых из центрального процессорного элемента 54. В конце первого такта каждого машинного цикла центральный процессорный элемент 54 посылает на шину данных информацию о состоянии, которая фиксируется в системном контроллере 55 импульсом строба, поступающим из генератора 53. Эта информация говорит о том, какие действия центральный процессорный элемент 54 будет выполнять в текущем машинном цикле, а также используется для управления потоками данных на ине 26 данных, при этом системным контроллером 55 формируются команды Чтение памяти (выход 27), Запись в память (выход 28), Запись в устройство ввода-вывода (выход 29) и Чтение устройств ввода-вывода (выход 30).
При поступлении на вход 34 запроса прерывания осуществляется запись в СТЕК (область блока 2 оперативной памяти) содержимого счетчика команд (текущего адреса прерванной програмы) и выдача на выходе 33 сигнала разрешения прерывания, с помощью которого обеспечивается чтение команы и адреса подпрограммы обслуживаия прерывания из контроллера 9 преываний в программный блок 1 управения .
Последовательный интерфейс 4 (фиг.6) осуществляет преобразование параллельного формата данных, приняого по шине 26 данных, в последоваельный, а также обратное преобразо- ание последовательного формата дан0
5
0
5
0
5
0
5
0
5
ных, принятых от дисплея 5. В интерфейсе используется асинхронный режим работы интерфейса 58 связи. Дешифратор 57 адреса осуществляет выбор интерфейса 4 в адресном поле программного блока 1 управления. При этом младший адрес шины 25 адреса, подключенный ко входу У/Д (Управление/ /данные) интерфейса 58 связи, обеспечивает ввод в интерфейс 58 команды или данных при поступлении сигнала записи (вход 29), вывод слова состояния или данных из интерфейса 58 при поступлении сигнала чтения (вход 30). Синхронизация входа приемника (СПР) и выхода передатчика (СПД) интерфейса 58 связи осуществляется тактовыми импульсами генератора 59, а синхронизация интерфейса 58 с программным блоком 1 управления - импульсами,- поступающими по входу 32. Входной 60 и выходной 61 усилители каналов обеспечивают необходимые -параметры цепей взаимосвязи с дисплеем 5.
Установка в исходное состояние последовательного интерфейса осуществляется сигналом, поступающим по входу 31. Задание режима производится перед началом работы в процессе инициализации, при этом в интерфейс 58 связи вводится управляющее слово, соответствующее режиму двусторонней одновременной передачи. Синхронизация обмена информацией между программным блоком 1 управления и последовательным интерфейсом 4 осуществляется программным опросом программным блоком 1 управления слова состояния интерфейса 4, которое содержит информацию о готовности передатчика интерфейса 58 связи принять данные от программного блока 1 управления и о готовности приемника интерфейса 58 связи передать данные в программный блок 1 управления.
Блок 8 таймеров (фиг.7) предназначен для формирования временных импульсов, которые используются в уст- ройстве как сигналы прерывания определенного уровня, поступающие в контроллер 9.
Дешифратор 63 адреса при наличии на старших разрядах шины 25 нужного сочетания сигналов осуществляет выбор (линия связи ВМ) одного из программируемых таймеров 64. Сигналы младших разрядов шины 25 поступают на таймеры 64 непосредственно и обеспечивают обращение (линии связи А) к каждому из счетчиков. Величины временных уставок поступают по шине 26 данных и вводятся сигналом записи (вход 29).
На входы СО и С1 поступают импульсы генератора 62 секундных импульсов, Выход окончания счета первого счетчика, запрограммированного на уставку 1 мин, таймера 64 соединен со входами СО и С1 таймера 64g. Прием импульсов счетчиками таймеров разрешается сигналом 40, поступающим с пульта 10 управления на входы стро- бирования. При равенстве содержимого какого-либо счетчика нулю на одном из выходов 39 блока появляется сигнал, который может использоваться как сигнал запроса на прерывание программного блока 1 управления.
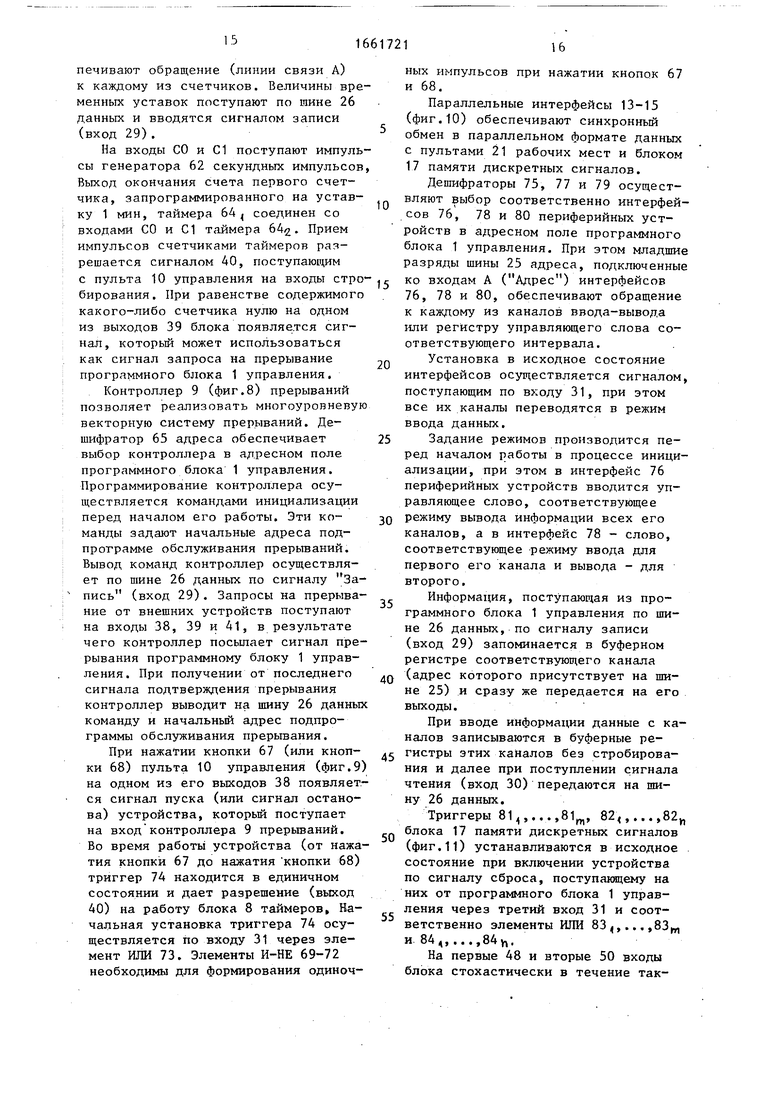
Контроллер 9 (фиг.8) прерываний позволяет реализовать многоуровневую векторную систему прерываний. Дешифратор 65 адреса обеспечивает выбор контроллера в адресном поле программного блока 1 управления. Программирование контроллера осуществляется командами инициализации перед началом его работы. Эти команды задают начальные адреса подпрограмме обслуживания прерываний. Вывод команд контроллер осуществляет по шине 26 данных по сигналу Запись (вход 29). Запросы на прерывание от внешних устройств поступают на входы 38, 39 и 41, в результате чего контроллер посылает сигнал прерывания программному блоку 1 управления. При получении от последнего сигнала подтверждения прерывания контроллер выводит на шину 26 данных команду и начальный адрес подпрограммы обслуживания прерывания.
При нажатии кнопки 67 (или кнопки 68) пульта 10 управления (фиг.9) на одном из его выходов 38 появляется сигнал пуска (или сигнал останова) устройства, который поступает на вход контроллера 9 прерываний. Во время работы устройства (от нажатия кнопки 67 до нажатия кнопки 68) триггер 74 находится в единичном состоянии и дает разрешение (выход 40) на работу блока 8 таймеров. Начальная установка триггера 74 осуществляется по входу 31 через элемент ИЛИ 73. Элементы И-НЕ 69-72 необходимы для формирования одиноч
0
5
0
5
0
5
0
5
ных импульсов при нажатии кнопок 67 и 68.
Параллельные интерфейсы 13-15 (фиг.10) обеспечивают синхронный обмен в параллельном формате данных с пультами 21 рабочих мест и блоком 17 памяти дискретных сигналов.
Дешифраторы 75, 77 и 79 осуществляют выбор соответственно интерфейсов 76, 78 и 80 периферийных устройств в адресном поле программного блока 1 управления. При этом младшие разряды шины 25 адреса, подключенные ко входам А (Адрес) интерфейсов 76, 78 и 80, обеспечивают обращение к каждому из каналов ввода-вывода или регистру управляющего слова соответствующего интервала.
Установка в исходное состояние интерфейсов осуществляется сигналом, поступающим по входу 31, при этом все их каналы переводятся в режим ввода данных.
Задание режимов производится перед началом работы в процессе инициализации, при этом в интерфейс 76 периферийных устройств вводится управляющее слово, соответствующее режиму вывода информации всех его каналов, а в интерфейс 78 - слово, соответствующее режиму ввода для первого его канала и вывода - для второго.
Информация, поступающая из программного блока 1 управления по шине 26 данных, по сигналу записи (вход 29) запоминается в буферном регистре соответствующего канала (адрес которого присутствует на шине 25) и сразу же передается на его выходы.
При вводе информации данные с каналов записываются в буферные регистры этих каналов без стробирова- ния и далее при поступлении сигнала чтения (вход 30) передаются на шину 26 данных.
Триггеры 814,...,81т, 82,...,82„ блока 17 памяти дискретных сигналов (фиг.11) устанавливаются в исходное состояние при включении устройства по сигналу сброса, поступающему на них от программного блока 1 управления через третий вход 31 и соответственно элементы ИЛИ 83,...,83W и 844,...,84ft.
На первые 48 и вторые 50 входы блока стохастически в течение такта работы технологического комплекса поступают сигналы со вторых выходов программируемых логических контроллеров 22 (об окончании изготовления изделия соответствующих агрегатов) и от датчиков 18 отклонени параметров изделий. Эти сигналы запоминаются в соответствуют ™ триггерах блока. Программный блок 1 управления после опроса состояния триггеров через входы 51 первого канала параллельного интерфейса 14 обеспечивает установку в исходное положение именно тех триггеров, с которых были посланы сигналы. При этом сигналы установки от программного блока 1 управления поступают через выходы второго канала параллельного интерфейса 14, третьи входы 52 блока и элементы ИЛИ 83 ,.. .,83 m и 84 ..., 84П.
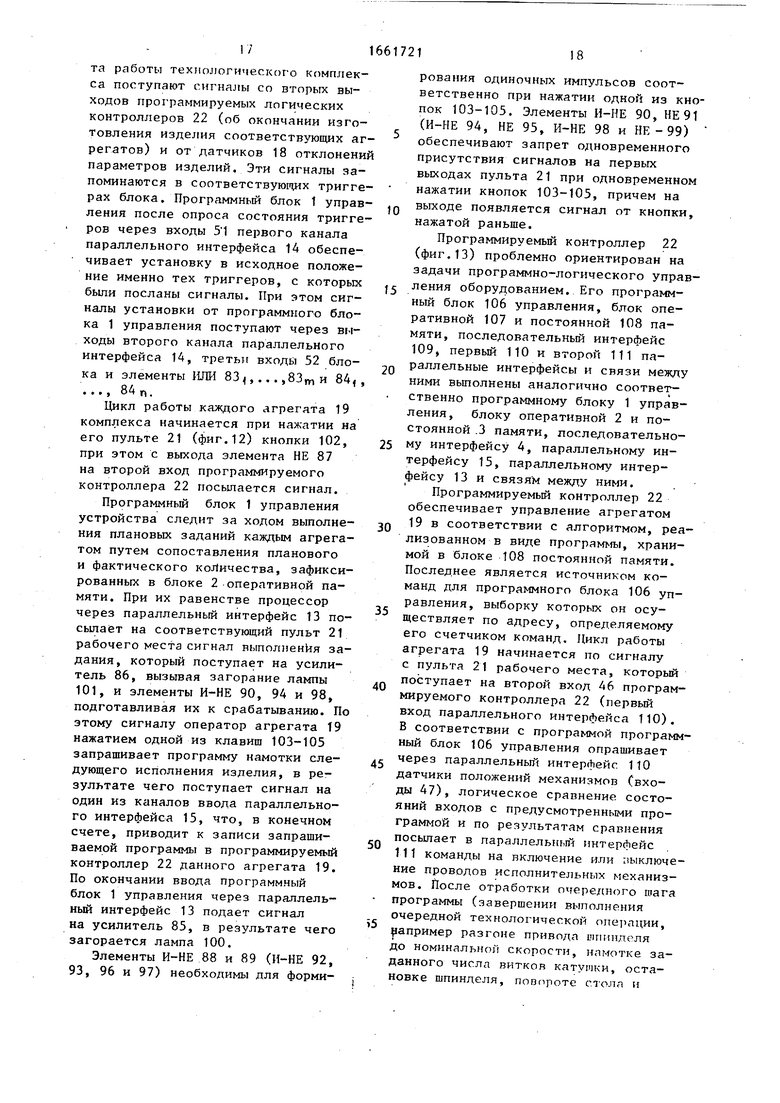
Цикл работы каждого агрегата 19 комплекса начинается при нажатии на его пульте 21 (фиг.12) кнопки 102, при этом с выхода элемента НЕ 87 на второй вход программируемого контроллера 22 посылается сигнал.
Программный блок 1 управления устройства следит за ходом выполнения плановых заданий каждым агрегатом путем сопоставления планового и фактического количества, зафиксированных в блоке 2 оперативной памяти. При их равенстве процессор через параллельный интерфейс 13 посылает на соответствующий пульт 21 рабочего места сигнал выполнения задания, который поступает на усилитель 86, вызывая загорание лампы 101, и элементы И-НЕ 90, 94 и 98, подготавливая их к срабатыванию. По этому сигналу оператор агрегата Т9 нажатием одной из клавиш 103-105 запрашивает программу намотки следующего исполнения изделия, в результате чего поступает сигнал на один из каналов ввода параллельного интерфейса 15, что, в конечном счете, приводит к записи запрашиваемой программы в программируемый контроллер 22 данного агрегата 19. По окончании ввода программный блок 1 управления через параллельный интерфейс 13 подает сигнал на усилитель 85, в результате чего загорается лампа 100.
Элементы И-НЕ 88 и 89 (И-НЕ 92, 93, 96 и 97) необходимы для форми0
5
0
5
0
5
0
5
0
рования одиночных импульсов соответственно при нажатии одной из кнопок 103-105. Элементы И-НЕ 90, НЕ 91 (И-НЕ 94, НЕ 95, И-НЕ 98 и НЕ - 99) обеспечивают запрет одновременного присутствия сигналов на первых выходах пульта 21 при одновременном нажатии кнопок 103-105, причем на выходе появляется сигнал от кнопки, нажатой раньше.
Программируемый контроллер 22 (фиг.13) проблемно ориентирован на задачи программно-логического управления оборудованием. Его программный блок 106 управления, блок оперативной 107 и постоянной 108 памяти, последовательный интерфейс 109, первый 110 и второй 111 параллельные интерфейсы и связи между ними выполнены аналогично соответственно программному блоку 1 управления, блоку оперативной 2 и постоянной 3 памяти, последовательному интерфейсу 4, параллельному интерфейсу 15, параллельному интерфейсу 13 и связям между ними.
Программируемый контроллер 22 обеспечивает управление агрегатом 19 в соответствии с алгоритмом, реализованном в виде программы, хранимой в блоке 108 постоянной памяти. Последнее является источником команд для программного блока 106 управления, выборку которых он осуществляет по адресу, определяемому его счетчиком команд. Цикл работы агрегата 19 начинается по сигналу с пульта 21 рабочего места, который поступает на второй вход 46 программируемого контроллера 22 (первый вход параллельного интерфейса 110). В соответствии с программой программный блок 106 управления опрашивает через параллельный интерфейс 110 датчики положений механизмов Свхо- ды 47), логическое сравнение состояний входов с предусмотренными программой и по результатам сравнения посылает в параллельный интерфейс 111 команды на включение ипи пыключе- ние проводов исполнительных механизмов. После отработки очередного шага программы (завершении выполнения очередной технологической операции, например разгоне привода шпинделя до номинальной скорости, нпмотке заданного числа витков катушки, остановке шпинделя, повороте стопа и
.д.) программный блок 106 управлеия увеличивает на единицу число в рограммном счетчике шагов, который азмещен в блоке 107 оперативной памяти. После окончания цикла изготовления изделия агрегатом 19 программный блок 106 управления обеспечивает выдачу сигнала с первого выхода 48 второго параллельного интерейса 111 (второго выхода контроллера) в блок 17 памяти дискретных сигналов.
В режимах связи программируемого контроллера 22 с программным блоком 1 управления осуществляется запись кодов данных программы намотки в блок 107 оперативной памяти, которые поступают через последовательный интерфейс 20 и последовательный интерфейс 109 программируемого контроллера 22 из программного блока 106 управления, который считывает эти данные из блока 2 оперативной памяти, считывание кода причины простоя из блока 107 оперативной памяти через последовательный интерфейс 109 программируемого контроллера 22 и последовательный интерфейс 20 в программный блок 1 управления.
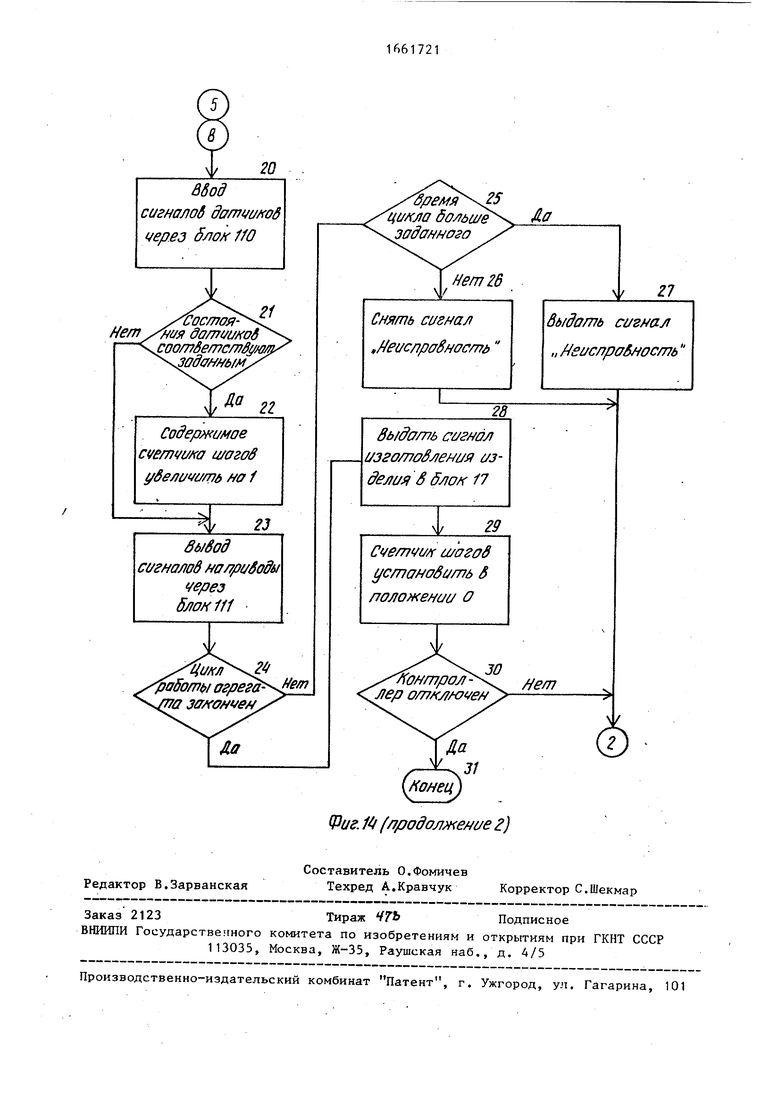
Операторы алгоритма (фиг.14) выполняют:
1 - начальную установку программируемого контроллера 22; 2, 3, 16-19 - вывод из программируемого контроллера 22 содержимого его счетчика шагов с целью определения состояния агрегата 19 (работы или причины простоя);
2, 3, 4, 6, 7, 9-15 - ввод в программируемый контроллер 22 параметров изделия, подлежащего изготовлению на агрегате 19;
8 - контроль запуска агрегата 19 в работу,1
4,...,6, 25,...,27 - контроль длительности текущего цикла работы;
20,.,,,23 - выполнение операций на шаге управления,
24, 28,...,30 - окончание цикла работы.
Устройство может применяться также для контроля и управления различными технологическими комплексами в дискретном производстве как в электротехнической, так и в других отраслях промышленности.
1
1
5
Формула изобретения
Устройство контроля и управления технологическим комплексом для намотки изделий, содержащее программный блок управления, блок оперативной памяти, первый и второй последовательные интерфейсы, дисплей, первый, второй и третий параллельные интерфейсы, табло отклонений, блок таймеров, контроллер прерываний, пульт управления, блок печати и элемент ИЛИ, выход которого соединен с входом прерывания контроллера прерываний, выход прерывания которого соединен с входом запроса прерывания программного блока управления, адресные выходы которого соединены с адресными входами блока оперативной памяти, первого, второго и третьего параллельных интерфейсов, первого и второго последовательных интерфейсов, блока таймеров и контроллера преры5 ваний, выход чтения программного блока управления соединен с входом чтения блока оперативной памяти, информационные входы-выходы которого объединены посредством шины данных
с информационными входами-выходами программного блока управления, первого и второго последовательных интерфейсов и контроллера прерываний, с информационными входами блока таймеров, второго и третьего параллель5 ных интерфейсов и с информационными выходами первого параллельного интерфейса, выход записи в память программного блока управления соединен с входом записи блока оперативной па0
мяти, выход записи во внешние блоки
0
5
ввода-вывода программного блока управления соединен с входами записи второго и третьего параллельных ин- с терфейсов, первого и второго последовательных интерфейсов, Контроллера прерываний и блока таймеров, выходы прерываний которого соединены с второй группой входов прерываний контроллера прерываний, выход чтения внешних блоков ввода-вывода программного блока управления соединен с входами чтения первого и второго последовательных интерфейсов и первого параллельного интерфейса, выход сброса программного блока управления соединен с входами сброса первого, второго и третьего параллельных интерфейсов, первого и второго последовательных интерфейсов и пульта управления, выходы прерываний которого соединены с первой группой входов прерываний контроллера прерываний, син- хровыход программного блока управления соединен с синхровходами первого и второго последовательных интерфейсов, выходы которых соединены со- ответственно с выходами и входами дис- плея и блока печати, выход разрешения прерывания программного блока управления соединен с входом разрешения прерывания контроллера прерываний, выходы третьего и параллельного интер- фейса соединены с входами табло состояний, выход разрешения пульта управления соединен с входом разрешения блока таймеров, отличающее- с я тем, что, с целью расширения об- ласти применения устройства, в него введены блок постоянной памяти, четвертый параллельный интерфейс, блок памяти дискретных сигналов, группа датчиков отклонений и группа агрега- тов, каждый из которых включает последовательный интерфейс, пульт рабочего места, программируемый контроллер, группу датчиков положения механизмов и группу приводов исполнительных ме- ханизмов, входы которых соединены с соответствующими управляющими выходами группы программируемого контроллера, управляющий выход которого соединен с соответствующим разрядом первой группы установочных входов блока памяти дискретных сигналов, вторая группа установочных входов которого соединена с выходами группы датчиков отклонений, выходы датчиков положений механизмов соединены с соответствующими информационными входами группы программируемого контроллера, информационный выход которого соединен с информационным входом последователь- ного интерфейса агрегата, информационный выход которого соединен с информационным входом программируемого
.Q г0 5 о „ ,-
5
контроллера, адресные выходы программного блока управления соединены с адресными входами четвертого параллельного интерфейса и последовательного интерфейса каждого агрегата группы, информационные входы-выходы которых соединены с шиной данных, выход записи во внешние блоки ввода-вывода программного блока управления соединен с входами записи четвертого параллельного интерфейса и последовательного интерфейса каждого агрегата группы, выход чтения внешних блоков ввода-вывода программного блока управления соединен с входами чтения последовательного интерфейса каждого агрегата группы и четвертого параллельного интерфейса, информационные выходы которого соединены с входами сброса блока ти дискретных сигналов, информационные выходы которого соединены с информационными входами четвертого параллельного интерфейса, выход сброса программного блока управления соединен с входами сброса четвертого параллельного интерфейса, последовательного интерфейса каждого агрегата группы и блока памяти дискретных сигналов, синхровыход программного блока управления соединен с синхровходом последовательного интерфейса каждого агрегата группы, соответствующие разряды информационных выходов второго параллельного интерфейса соединены с информационными входами пульта рабочего места соответствующего агрегата группы, информационные выходы пульта рабочего места каждого агрегата группы соединены с соответствующими входами первого параллельного интерфейса и элемента ИЛИ, выход разрешения пульта рабочего места соединен с входом разрешения программируемого контроллера.
Источник данных
Приемник данных
Операторы ал- | горитма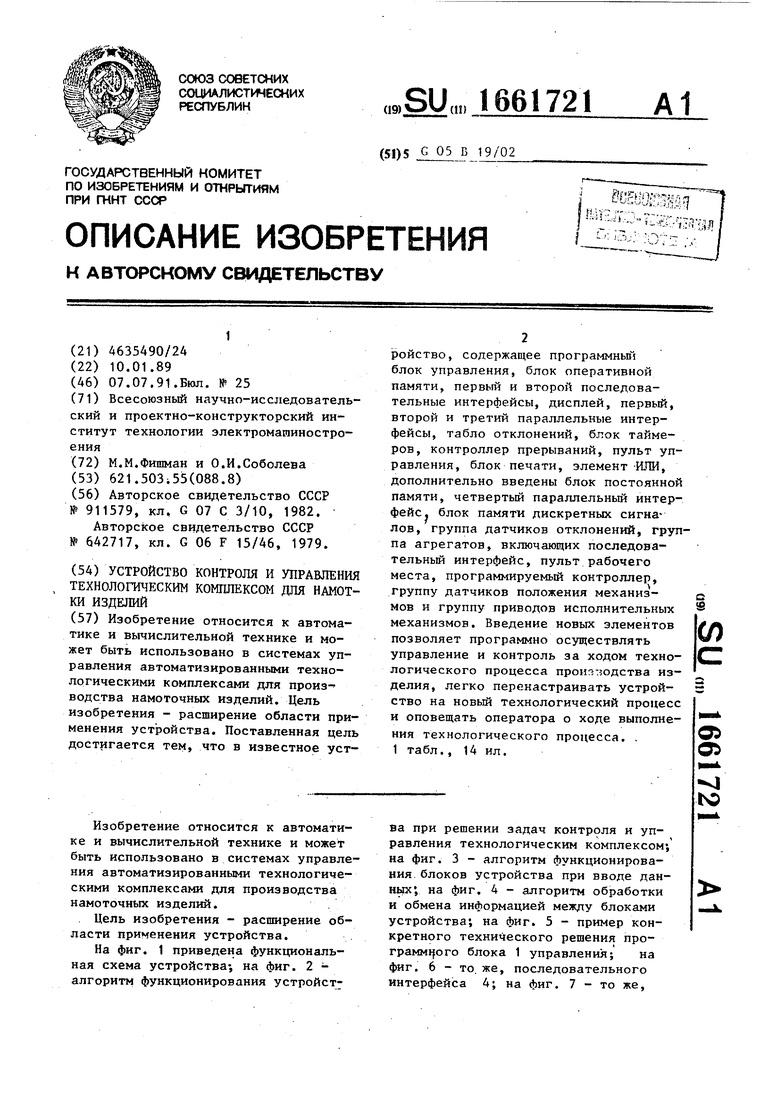


| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОГРАММНО-ЛОГИЧЕСКОЕ ВРЕМЕННОЕ УСТРОЙСТВО | 2001 |
|
RU2199146C1 |
| Многоканальное устройство управления шаговым двигателем | 1990 |
|
SU1789970A1 |
| Устройство для программного управления намоточным станком | 1989 |
|
SU1725184A1 |
| КОНТРОЛЛЕР | 1991 |
|
RU2012043C1 |
| РЕЗЕРВИРОВАННАЯ СИСТЕМА | 1991 |
|
RU2010315C1 |
| СПОСОБ ВЫЧИСЛЕНИЯ ЭКВИВАЛЕНТНОЙ НАРАБОТКИ ПЛАНЕРА САМОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2097830C1 |
| Устройство для обмена информацией | 1987 |
|
SU1497619A1 |
| ВНУТРИСХЕМНЫЙ ЭМУЛЯТОР | 1996 |
|
RU2110833C1 |
| ИМИТАТОР СИГНАЛОВ УПРАВЛЕНИЯ ПОЗИЦИОНИРОВАНИЕМ МАГНИТНЫХ ГОЛОВОК ОТНОСИТЕЛЬНО МАГНИТНЫХ ДИСКОВ | 1991 |
|
RU2017239C1 |
| Устройство для отладки программ микроЭВМ | 1989 |
|
SU1815643A1 |





Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах управления автоматизированными технологическими комплексами для производства намоточных изделий. Цель изобретения - расширение области применения устройства. Поставленная цель достигается тем, что в известное устройство, содержащее программный блок управления, блок оперативной памяти, первый и второй последовательные интерфейсы, дисплей, первый, второй и третий параллельные интерфейсы, табло отклонений, блок таймеров, контроллер прерываний, пульт управления, блок печати, элемент ИЛИ, дополнительно введены блок постоянной памяти, четвертый параллельный интерфейс, блок памяти дискретных сигналов, группа датчиков отклонений, группа агрегатов, включающих последовательный интерфейс, пульт рабочего места, программируемый контроллер, группу датчиков положения механизмов и группу приводов исполнительных механизмов. Введение новых элементов позволяет программно осуществлять управление и контроль за ходом технологического процесса производства изделия, легко перенастраивать устройство на новый технологический процесс и опловещать оператора о ходе выполнения технологического процесса. 14 ил.
Ячейка блока 2 оперативной памяти
Ячейка блока 3 постоянной памяти
Программный блок 1 управления
Программный блок 1 управ- 5-7 ления
5,6,8
Регистр управления последо- 9-12 вательного интерфейса 4 Регистр передатчика последо- 9-13 вательного интерфейса 4, дисплей 5
Регистр управления последова- 9,14-16 тельного интерфейса 11 Регистр передатчика последо- 9,14-17 вательного интерфейса 11, устройство 12 печати
Регистр управления последо- 9,18-20 вательного интерфейса 20 Регистр передатчика последо- 9,18-21 вательного интерфейса 20, программируемый контроллер 22 Таймер блока 8 таймеров 9,22,23 Контроллер 9 прерываний 9,24,25 Параллельный интерфейс 13, пульты 21 рабочих мест 9,26-28 Параллельный интерфейс 14, 9,29-31 блок 17 памяти дискретных сигналов
Параллельный интерфейс 6, 9,32-34 табло 7 отклонений
Ячейка блока 2 оперативной 52,53 памяти
Программный блок 1 управления
35-37,39 35-39
35,40,41,43 35,40-43
35,44,45,47 35,44-47
35,48,49 35,50,51
(Наиало
f
1
Начальная установка устройства
Инициализация режимов блоков
W,9,,
11
ВыВор интерфейса
для 1-го контроллера
v
412
ввод массива | программы намотки 6 кон- троллер |
13
Разрешение автоматического
режима контроллера
&о
Яооерой ы о&едены 6с
Опрос
контроллера, прерываний
ввод массива программы намотки в контроллер
ввод и анализ данных орайо/ле оборудования
Накопление времена лростоя оборудования
Контроль ритма роботы оборудования
Регистрация
итоговых
даннь/jc
Фиг. 2 (продолжение)
(Начало
1
-
Передача символа последовательным
кодом из регистра передатчика на дисплей 5
/
Прием кода ретранслированное о дисплеем символа в регистр приемника интерфейса
у
ввод
содержимого регистра состояния интерфейса 4 в процессор 1
и , Лриемнш
ещ интерфейса & готов к выдаче данных
Да
10
ВЗод
содержимого регистра приемника интерфейса 4 8 процессор f
11
Сравнение кодов переданного и ретранслированного символов
12
(
S
Нет ft
Формирование
адреса
следующей ячейки ЯЗ У
Да
10
-М/5
Фиг.З
15
Формирование адреса ячейки ОЗУ, 8 которую вводится первый разряд величины параметра
Приемпоследовательного «ада символа 6 регистр приемника интерфейса 4
v
/7
ввод
содержимого ре - гистра состояния интерфейса 4 в процессор 1
Приемнйй 18 Нет Интерфейсов готов кНыдаче данных
W
двод
содержимого ре - гистра приемника интерфейсов S процессор f
20
Запись
рязряда беличинь/
параметра S
из процессора /
t
21
вб/Sod
донных из процессора 1 в регис/яр передатчика интерфейса Ц
v
22
Передача /сода ре- транслиробанного
символа из регистра передатчика на дисплей 5
23 п , беличим
Д0 /лорометро 6 озЪ принята
Нет
24
Формирование адреса
следующей ячейки ОЗУ
Фиг. 3 (продолжение)
t
нет
Шиг.Ч
зг
Нет
Фиг 1 {продолжение t)
Прием последовательного кода из блоха 5, преобразование 6 fla- роллельныи код
39
Передача числа из блока 4 8 5/юк 1
50
Г3адан Нет адрес блоко
ft. Да
Прием последовательного хода из блока 22, пре- оВрозобоние В параллельный код
Прием лослеообателбного кода из блока fst лре- образобание Ј ла- раллельный ход
Передача сигнолоб запросов но оо- служибание из лульмоб 21 через блок fS S 5лок1
43
г
4Т
Передача числа из 5л ока ц 8блок1
i
Фиг.4 (Продолжение2)
й
Формирование блоком1 сигнала 27
Передача из блока 3ft/3 стека, в счетчиккоманд /пекущего адреса программы
8 12 13 16 17 20 21 23
J/ Ф Ф Ч
ЖЖЖ А А А ЖЖ Ж
25 28 31 М 39 43 47 49 51 .
d
1}тклюуи/т 5 Дя стройс/л- во
выполнение арифметических или логических
операций
блоком 1
Формирование блоком 1 сигнала 28 Запись в блок 2
в стек содержимого
счетчика команд для возврата к прерванной программе
jо
t
60
Формирование блоком 1 сигнала JJ Чтение команды и адреса подпрограммы обслуживания прерывания из блока 9 6 5лок 1
Фиг. 4 / продолжение3}
Т
J
5 Мф
7l. I9QI
Фиг.д
Of}
1
н
9
i I
Ј
IZZI99
40
и, tZt
,,
46
W
J/
Фиг.11
T
Риг.13
№
W
Фм.М
Занесение Волок ЮТадреса текущей команды программы
/
10
Прием начального адреса блока 107 начиная
намотки
/
11
Лрием символа из блока 109
ИзВлечение из блока 107 адреса /пекущей команды программы
Да 13
Запись символа 85лок 101
v
#
Формирование
следующего адреса
блока 101
Фиг. М продолжение 4)
16
Занесение
в блок W7
адреса /next/щей
командб/лрограммб
/
17
Прием
адреса ячейки Ю7{афеса. С(/е/77 /Ј/ха шагав)
v
18
вб/Sod
S блок 1О9 со дер - жимого cvemvt/xa шаговf/fada лри- W/нь/ лрос/лоя)
15
/
19
Извлечение из блока Ю7офе- са/яещщей #0- мояды ярограмш/
20
В8од
сигнал об дагпщ/коб через блок НО
Тос/лояНет /тмя da/TwuxoS coomSemc/7 i зоданнь/м
21
Да
21
Содержимое метчика шагов ибеличи/Яб на f
V
23
вывод
ci/гналов на приводы
через
блок 111
IfwjT работы огрега е/п ча jffx0Mve#
{Конец Фиг. М (продолжение 2)
цикла больше Ая заданного
Нет 26
27
Снять сигнал ,#еислро8ностг
выдать сигнал „ Мвислробность
28
Вь/дать сигнал изго/по ления изделия 8 блок 17
м
29
Cve/77V(//r шагов установить 6 положении О
Хонгпрол //е/77 лер отключен
Ж
2
| Устройство для контроля и учета работы производственного оборудования | 1979 |
|
SU911579A2 |
| Устройство для контроля производственного процесса | 1976 |
|
SU642717A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
