(S) СИСТЕМА МАГНИТНОГО ПОДВЕСА РОТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| МОТОР-КОЛЕСО | 2017 |
|
RU2673587C1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2655098C1 |
| Беспазовый синхронный генератор с интегрированным магнитным подвесом | 2016 |
|
RU2647490C1 |
| Мотор-колесо для летательного аппарата | 2022 |
|
RU2784743C1 |
| Магнитоэлектрическая опора | 1980 |
|
SU1051341A1 |
| Мотор-колесо для самолета | 2018 |
|
RU2703704C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| Электродвигатель | 1988 |
|
SU1658284A1 |
| Электродвигатель-маховик с электромагнитным подвесом ротора | 1981 |
|
SU964883A1 |
| Датчик положения | 1979 |
|
SU853368A1 |
1
Изобретение относится к приборо-i строению, связано с вопросами бесконтактного подвешивания быстровращающихся роторов и может быть использовано в гироскопах, маховиках, центрифугах и т.п.
J Известны системы магнитного подвеса ротора, содержащие подшипники на постоянных магнитах и электромагниты аксиальной стабилизации ротораj а также отдельный статор для приведения ротора во вращение 1.
Однако известная конструкция характеризуется сложностью, связанной с необходимостью выполнения двух электромагнитных элемента с разными обмотками .(электромагниты и статор) и разными источниками питания,VMTO приводит к увеличению веса, расхода активных материалов, повышенному энергопотреблению, что для автономных объектов, на которых используются подобные роторы, например гироскопов, является существенным недостатком.
Известны также системы магнитного .подвеса ротора, содержащие установленные в корпусе два статора с многофазными обмотками, подключенными к регулируемому источнику напряжения, ротор с постоянными магнитами, датчики углового и линейного положения ротора, соединенные с регулируемым источником через блок управления 2}.
Недостатками этого устройства яв10ляются сложность, низкий КПД. Крсже того, для стабилизации ротора необходим сложный блок управления, реаги рующий на изменение положения ротора по трем осям и еще по углу поворота.
IS Увеличенная сложность блока управления положением ротора, наличие большого числа датчиков положения (по крайней мере пяти) ведет к уменьшению надежности всей системы магнитмного подвеса.
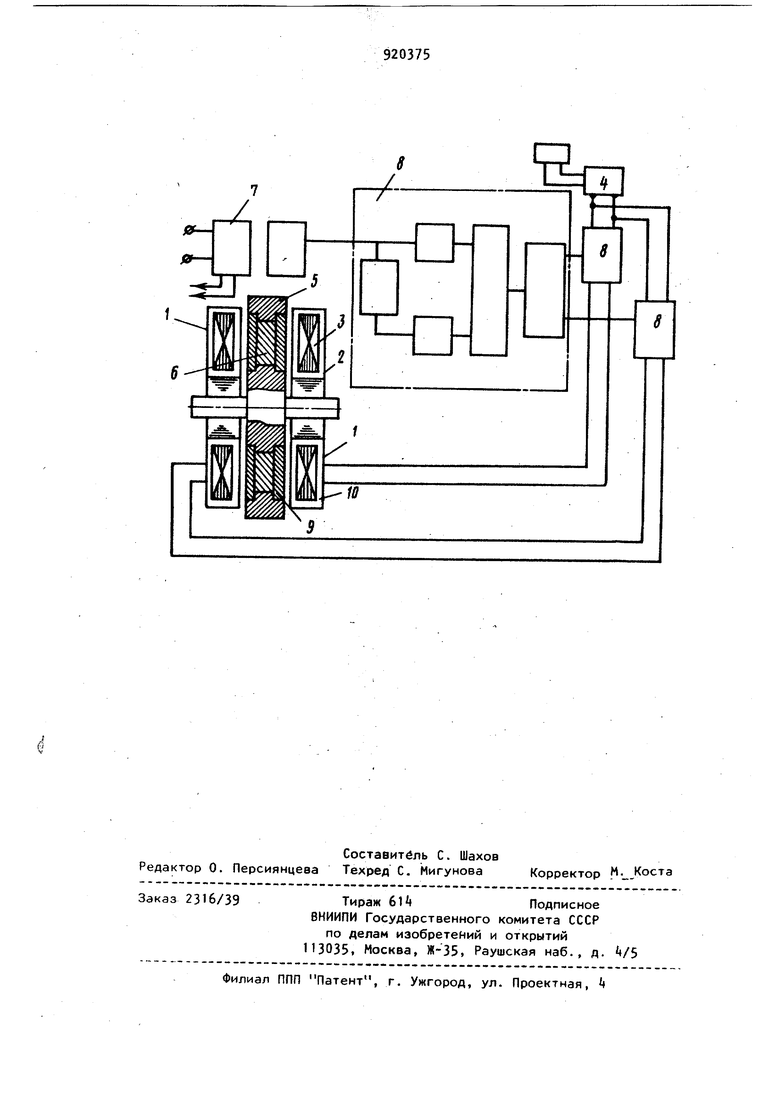
Целью изобретения является упрощение системы подвеса, повышение КПД. 392 Указанная цель достигается тем, что в системе магнитного подвеса.ротора, содержащей установленные в кор пусе два статора с многофазными обмотками, подклкменными к регулируемому источнику напряжения, ротор с постоянными магнитами, датчики углового и линейного положения ротора, соединенные с регулируемым источником через блок управления, на постоя ных магнитах установлены с промежутками относительно друг друга кольцевые секторы из ферромагнитного материала, а статоры снабжены кольцевы ми магнитопроводами. На чертеже представлена принципиальная схема системы магнитного подвеса. Система магнитного подвеса содержит установленные в корпусе 1 два статора 2 с многофазными обмотками 3 подключенными к регулируемому источнику напряжения , ротор 5 с постоянными магнитами 6, датчики 7 углово го и линейного положения ротора, сое диненные с регулируемым источником через блок управления 8,на постоянных магнитах установлены с промежутками относительно друг друга кольцевые секторы 9 из ферромагнитного материала, а статоры снабжены кольцевы ми магнитопроводами 10. Система магнитного подвеса работа ет следующим образом. Ротор 5 центрируется в диаметраль ном направлении вследствие взаимодей ствия поля постоянных магнитов 6 с магнитопроводом статора 2, т.е. создается радиальная центрирующая сила В аксиальном направлении ротор 5 неустойчив, вследствие неизбежного неравенства сил притяжения ротора 5 к двум статорам 2. Для обеспечения аксиальной устойчивости ротора 5 осуществляется регулирование тока в обмотках 3 двух статоров 2 таким образом, что величина его возрастает в том статоре 2, от которого ротор 5 удаляется или наоборот - ток уменьшается в том статоре 2, к которому приближается ротор 5. В общем случае может осуществляться и комбинированное управление токами. Наличие ферромагнитных секторов 9, по которым обеспечивается замыкание магнитного потока, созданного протекающим по обмоткам 3 тока, и обуславливает создание той составляющей аксиальной силы притяжения ротора 5 к статору 2, которую можно регулировать. Взаимодействие же потока магнитов 9 с токами.статора 2 создает вращающий момент, приводящий во вращение ротор 5. Повышение КПД обеспечивается за счет того, что в предлагаемой конструкции появляется возможность снизить намагничивающий ток обмоток 3. Радиальное положение ротора 5 устойчиво за счет наличия постоянных магнитов 6, что упрощает систему подвеса. Таким образом, использование предлагаемой системы магнитного подвеса обеспечивает упрощение конструкции и повышение КПД. Формула изобретения Система магнитного подвеса ротора, содержащая установленные в корпусе два статора с многофазными обмотками, подключенными к регулируемому источнику напряжения, ротор с постоянными магнитами, датчики углового и линейного положения ротора, соединенные с регулируемым источником через блок управления, о т л и чающаяся тем, что, с целью упрощения системы, на постоянных магнитах установлены с промежутками относительно друг друга кольцевые секторы из ферромагнитного материала, а статоры снабжены кольцевыми магнитопроводами. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3929390, кл.,308-10, 1975. 2.Патент США N° , кл. 308-10, 197А (прототип).
