Изобретение относится к-системам автоматического управления и может быть использовано при разработке устройств формирования оптимальных программ пространственного положения твердого тела.
Целью изобретения является повышение быстродействия известной системы путем применения формирователя управления, обеспечивающего формирование оптимальной по быстродействию программы переориентации твердого тела во всей области возможных состояний подвижного (связанного) базиса относительно неподвижного.
Сущность изобретения поясняется фиг. 1 и 2.
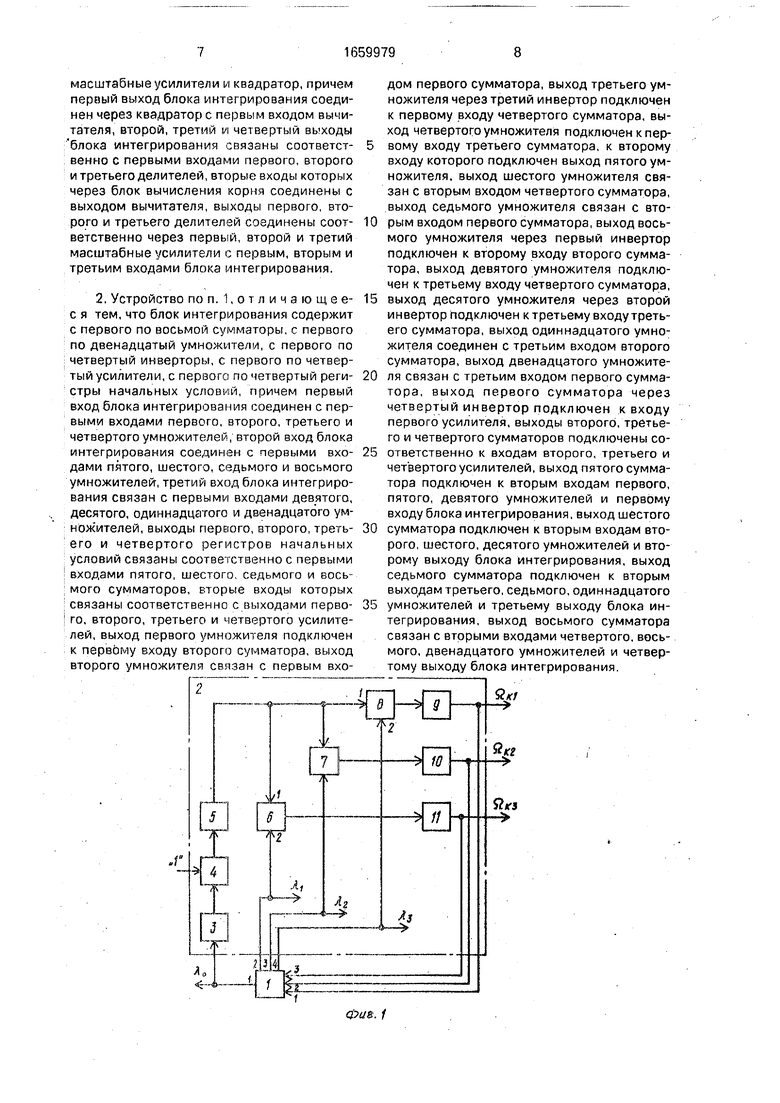
Структурная схема устройства представлена на фиг. 1. Она содержит блок 1 интегрирования, формирователь 2 управления, квадратор 3, вычитатель 4, блок 5 вычисления корня, первый 6, второй 7, третий 8 блоки деления, первый 9, второй 10, третий 11 масштабные усилители.
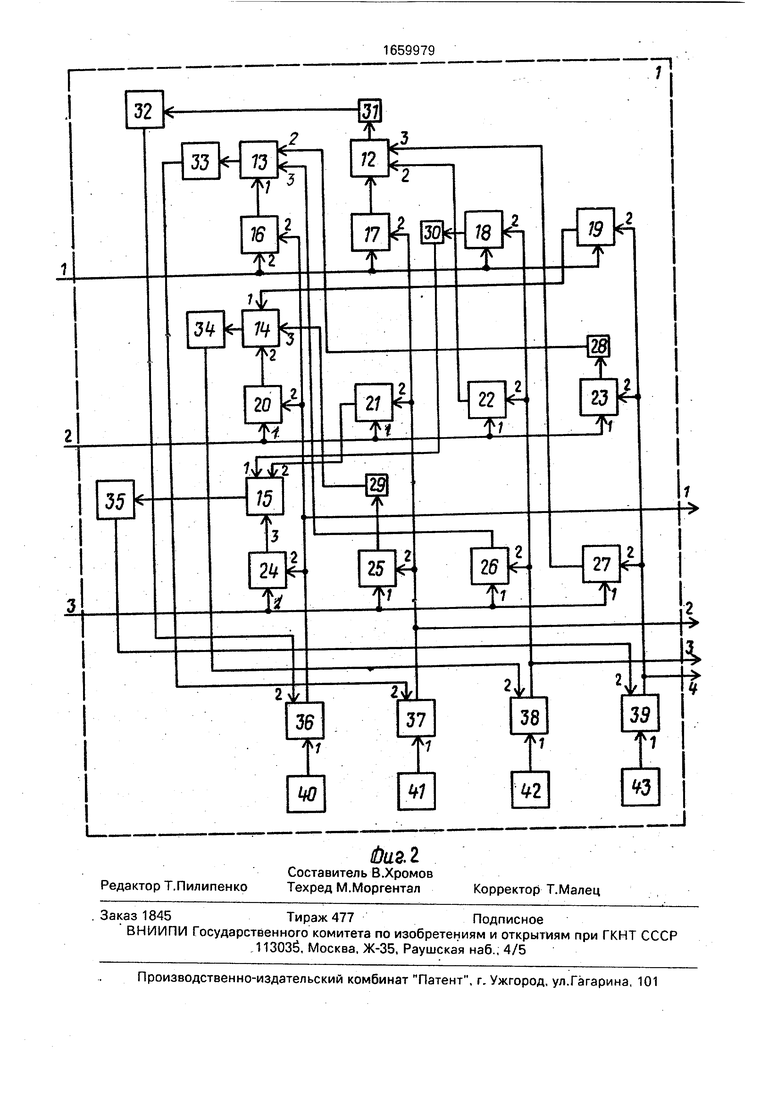
Структурная схема блока интегрирования представлена на фиг. 2. Она содержит первый 12, второй 13, третий 14, четвертый 15 сумматоры, первый 16, второй 17, третий 18, четвертый 19, пятый 20, шестой 21, седьмой 22, восьмой 23, девятый 24, десятый 25, одиннадцатый 26, двенадцатый 27 умножители, первый 28, второй 29, третий 30, четвертый 31 инверторы, первый 32, второй 33, третий 34, четвертый 35 усилители, пятый 36, шестой 37, седьмой 38, восьмой 39 сумматоры, первый 40, второй 41, третий 42. четвертый 43 регистры начальных условий.
Математическая модель кинематики твердого тела представляет собой систему дифференциальных уравнений в кватерни- онной форме
dt
Q
(1)
(Л
С
Os
ел ю ю
ю
Управлениями в задаче являются компоненты вектора угловой скорости, ограниченные по евклидовой норме
3 16599794
( Ј Qсов и принимает нулевое значение и
J °уявляется функцией Ляпунова. Уравнение (5)
где$Ј- величина максимально допустимогоявляется уравнением в частных производмодуля вектора скорости.ных, общее решение его имеет вид
Целью управления является перевод объек-5 T° T°(W(A)), (9)
та из произвольного положения Л (to) в по-Определим частные производные
ложение Л (ti) {1,0.0,0}, которому. „ дто w д 0
соответствует совмещенное состояние од--- . 5 У Ј. /
поименными осями связанного Е и опорно- о 9W дъа 3W ° QJ
го 1 базисов за минимальное время.10 Т0 9т° SW 9T°
Функциональное уравнение Беллмана,дл, gw 1ЙГ Э W ()
полученное на основе характеристического
условия оптимальности в задаче быстродей-Подставим (10) в (5) и после приведения поствия, имеет виддобных членов получим уравнение
()r.16 -о..(,Г fЈ+«-o(.
. л-ро /г которое необходимо решать с граничным
v-( + AzQ3- 3Q2) Wусловием
1 С- ЭТ°
+ 2ГиоС22- - ЛзЛ,- Д,а3) -д -+20 T°(W(A) (ti) (12)
j, дт° -1 Для фиксированного момента времени t to
(„,, + ,,)gi , ЛОо const, поэтому уравнение (11) может
гдеЛ- замкнутое множество в виде гипер-быть решено методом характеристик. Характесферы радиуса .ристиками (11) будут решения системы обыкСгруппируем члены при управлениях,25 новенных дифференциальных уравнений
уравнение (2) примет вид
(.°.« .в.а,01Ь.-0,Л-в..(«- «5 ).- JСистема (13) интегрируется в квадратурах.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для виброиспытаний | 1989 |
|
SU1657998A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ АМПЛИТУДЫ НЕКОГЕРЕНТНОЙ ПОСЛЕДОВАТЕЛЬНОСТИ СВЕРХШИРОКОПОЛОСНЫХ КВАЗИРАДИОСИГНАЛОВ ПРОИЗВОЛЬНОЙ ФОРМЫ | 2021 |
|
RU2774436C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2602342C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА И ДЛИТЕЛЬНОСТИ НЕКОГЕРЕНТНОЙ ПОСЛЕДОВАТЕЛЬНОСТИ СВЕРХШИРОКОПОЛОСНЫХ КВАЗИРАДИОСИГНАЛОВ ПРОИЗВОЛЬНОЙ ФОРМЫ | 2022 |
|
RU2797027C1 |
| Цифровой фильтр | 1990 |
|
SU1739483A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ НЕКОГЕРЕНТНОЙ ПОСЛЕДОВАТЕЛЬНОСТИ СВЕРХШИРОКОПОЛОСНЫХ КВАЗИРАДИОСИГНАЛОВ ПРОИЗВОЛЬНОЙ ФОРМЫ | 2020 |
|
RU2756974C1 |
| Спектральный анализатор случайных сигналов | 1984 |
|
SU1269048A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА И ДЛИТЕЛЬНОСТИ ОДИНОЧНОГО СВЕРХШИРОКОПОЛОСНОГО КВАЗИРАДИОСИГНАЛА ПРОИЗВОЛЬНОЙ ФОРМЫ | 2022 |
|
RU2797258C1 |
| Устройство для моделирования удара тела о неподвижную преграду | 1985 |
|
SU1381341A1 |
| Устройство для вычисления координат | 1989 |
|
SU1635178A1 |
Изобретение относится к системам автоматического управления и может быть использовано при разработке устройств формирования оптимальных программ пространственного положения твердого тела. Целью изобретения является повышение быстродействия известной системы путем применения формирователя управления, обеспечивающего формирование оптимальной по быстродействию программы переориентации твердого тела. Устройство содержит блок интегрирования 1, формиро- ватель управления 2, квадратор 3, вычита1 тель 4. блок вычисления корня 5, первый 6, второй 7, третий 8 блоки деления, первый 9, второй 10 и третий 11 масштабные усилите- ли. 1 з.п.ф-лы, 2 ил.
На основе неравенства Коши-Буняковскогоj 2 з / « - i
определим минимум (3) по управлениям40 Подставим в (16) выражения (14) и (15) и
мим f 2 гпосле приведения подобных членов полй en jT7 i учим уравнение
г (/4 (4)T° t17)
.Q°(al) ,, (л(1))(ла,)),|ад0(
Подставив (4) в (3), получим уравнение 4Ъ -о
Гамильтона-Якоби с граничным условиемС учетом того, что W(ft(ti)) 0, после интег- 2 f S (5)рирования (17) получим выражение для J тимального значения функционала качества
T°(A(t,)-0 (б)Для1 Ь 0. (18ч ,
Компоненты кватерниона Л (t) подчинены50 о W(A(t0n
условию нормы (1) зТ°(Л()-- -- г. П1|421 4i. 1 , чaexWK(.(toV(U ,
i-o (7)г. Очевидно, что условие (7) является первымОчевидно, что все проведенные рассуждеинтегралом системы (1). В (1) рассмотрена 55 ния и выкладки для определения оптимальфункция, полученная из (7)ного значения функционала качества Т°
VuUurt-ifVi .г1 orсправедливы для произвольного момента
wiAW)-2 о 2 3-1 (8)времени и состояния объекта Л (t) . Учиты- которая также является первым интегра- вая (8), окончательно получим лом, в ориентированном положении бази
-М от™ С- U U ЯсЛСЛ) /
(1,
о.
0Ъ0
оптимальное время переходного процесса. Соотношение (4) определяет структуру оптимального закона управления в виде оптимальной ориентации вектора угловой скорости из условия достижения объектом цели 10 управления
а„ГйваД±а Г а (Н
420)
В соответствии с (3) в законы управле- 15
ния входят частные производные от (19)
Э-Ло
(21)
Ъ0Ъ1(Ъ + Ъг2 + (1г
2 t ЭТОПТ
;
20
0
So ASO- MV 2; а (1-3)
Подстановка (21) в (20) позволяет окончательно получить выражения для оптимального управления
П ГП°(7 ( Р2
которые принципиально отличаются от из30
25
30
вестногозаконауправления
- kjAo AiО) и позволяют оптимально формировать угловую скорость коррекции для управления ориентацией в открытой области пространства состояний базисов Е и I.
Устройство работает следующим образом. В момент включения устройства регистры 40-43 обеспечивают выдачу начальных условий компонент кватерниона Aj (o)(i 0,3) в соответствующие сумматоры 36-39. В связи с тем, что на входах 1-3 блока интегрирования информация отсутствует, на вторые входы блоков 36-39 сумматоров 36-39 коды приращений компонент кватерниона AAi не поступают. Таким образом с 1-4 вы- 35 ходов блока интегрирования на соответст- вующие входы формирователя управления поступают коды начальных условий Aj(Q}, которые преобразуются в коды управления в соответствии с (23) следующим образом. и Код AofOje квадраторе 3 возводится в квадрат и поступает на вычитаемый вход вычи- тателя 4, на второй вход уменьшаемого которого постоянно подается код 1. Далее код ( 1-Ао (0 )) в блоке 5 преобразуется к виду (1 - АО (0 ))1/2 и поступает на первые входы (делителя) блоков деления 6-8, на вторые входы (делимого) которых поступа- ют соответственно коды A,(cJ(i 1,3). Резуль25
45
0
таты деления в масштабных усилителях 9-11 масштабируются кодом Оэ результате формируются коды Qcj (j 1,3), поступающие на соответствующие входы блока интегрирования, в котором в соответствии с соотношениями (23) формируются коды приращедий компонент кватерниона ДА) 0 0,3)
uV-f K ifob wMoha fa), (,Ы°)-Якг/МО),
,(23)
5
0
30
25
30
35 и
u -LQMfle(oVC2Vi(ObS2l 3 MO)J,
(° -Ям/Мо)
и в сумматорах 36-39 коды текущих значений компонент кватерниона
Ai(t) A;( (i-оЗ) Д24)
поступающие далее в формирователь управления 2 для формирования оптимального управления в соответствии с (22), 25 рассмотренным образом.
Приращения ААн формируются с помощью блоков 12-30. На входы 1-3 блока интегрирования поступают коды (j 1, 2, 3), которые далее поступают на первые входы соответствующих умножителей 16- 27. На вторые входы соответствующих групп умножителей 16-27 поступают коды ЛО 0,3) текущих (начальных) значений компонент кватерниона. В умножителях формируются коды Ai 0 1 -3: i ГЗ). которые с соответствующими знаками суммируются в соответствии с (24) в сумматорах 12-15 и
. Н далее масштабируются величиной у в
усилителях 32-35, где Н - шаг интегрирования.
Таким образом, предлагаемое устройство обеспечивает формирование оптимальных значений угловой скорости и программ изменения кинематических параметров переориентации объекта из произвольного начального состояния в заданное.
Формула изобретения 1. Устройство формирования программы кинематического разворота твердого тела, содержащее блок интегрирования, о т- личающееся тем, что, с целью повышения быстродействия устройства путем формирования оптимальной по быстродействию программы переориентации твердого тела, оно содержит вычитатель, блок вычисления корня, первый, второй и третий делители, первый, второй и третий
масштабные усилители и квадратор, причем первый выход блока интегрирования соединен через квадратор с первым входом вычи- тателя, второй, третий и четвертый выходы блока интегрирования связаны соответственно с первыми входами первого, второго и третьего делителей, вторые входы которых через блок вычисления корня соединены с выходом вычитэтеля, выходы первого, второго и третьего делителей соединены соответственно через первый, второй и третий масштабные усилители с первым, вторым и третьим входами блока интегрирования.
дом первого сумматора, выход третьего умножителя через третий инвертор подключен к первому входу четвертого сумматора, выход четвертого умножителя подключен к первому входу третьего сумматора, к второму входу которого подключен выход пятого умножителя, выход шестого умножителя связан с вторым входом четвертого сумматора, выход седьмого умножителя связан с вторым входом первого сумматора, выход восьмого умножителя через первый инвертор подключен к второму входу второго сумматора, выход девятого умножителя подключен к третьему входу четвертого сумматора,
выход десятого умножителя через второй инвертор подключен к третьему входу третьего сумматора, выход одиннадцатого умножителя соединен с третьим входом второго сумматора, выход двенадцатого умножителя связан с третьим входом первого сумматора, выход первого сумматора через четвертый инвертор подключен к входу первого усилителя, выходы второго, третьего и четвертого сумматоров подключены соответственно к входам второго, третьего и четвертого усилителей, выход пятого сумматора подключен к вторым входам первого, пятого, девятого умножителей и первому входу блока интегрирования, выход шестого
сумматора подключен к вторым входам второго, шестого, десятого умножителей и второму выходу блока интегрирования, выход седьмого сумматора подключен к вторым выходам третьего, седьмого, одиннадцатого
умножителей и третьему выходу блока интегрирования, выход восьмого сумматора связан с вторыми входами четвертого, восьмого, двенадцатого умножителей и четвертому выходу блока интегрирования.
1659979
| Бранец В.М | |||
| и Шмыглевский И.П | |||
| Применение кватернионов в задачах ориентации твердого тела | |||
| М.: Наука, 1973. |
