СО 00
САЭ 4
И:1оГ)ретецие относится.к плалоговоО пы- И слптслы1ои технике и может быт1; нсполь- :u)naiiri, например, в тренажерах нри нмггга- UIM1 движения трзис орт1 ых средств п услп- П1Ш5 паличмя п зоне, дпнжешш неподвижных прргрпд.
Цель нзобретепия - нопышепие точио- CT5I мплелнропаннп удара.
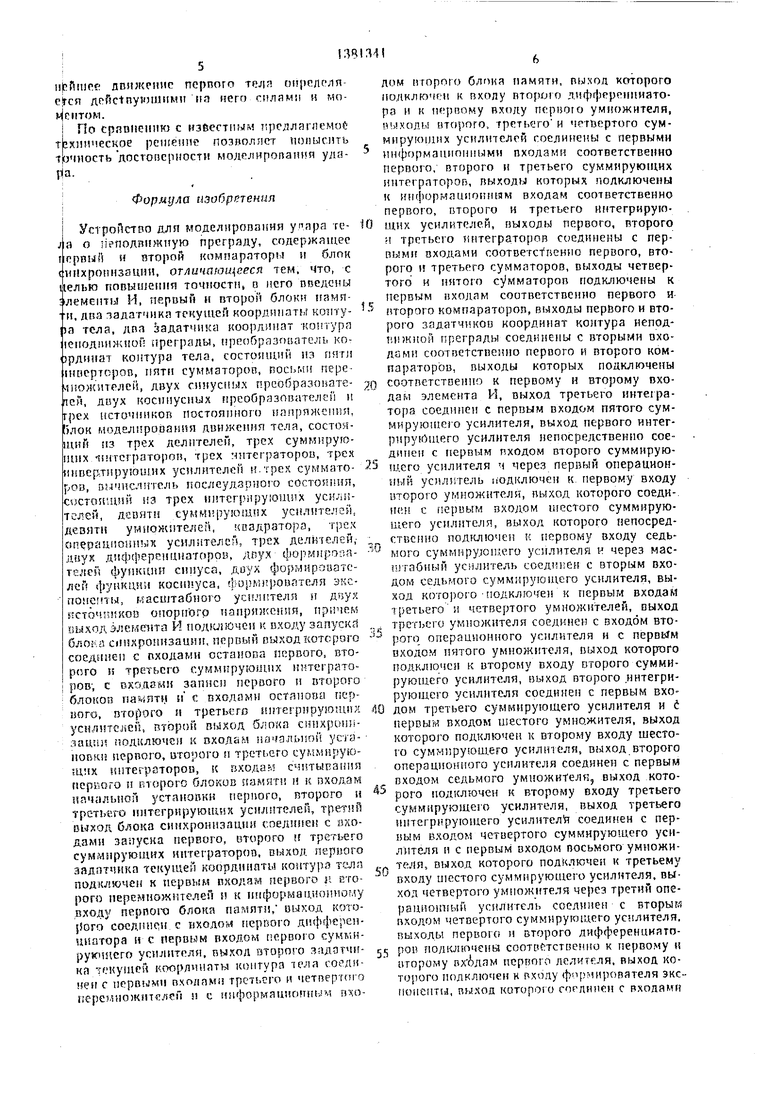
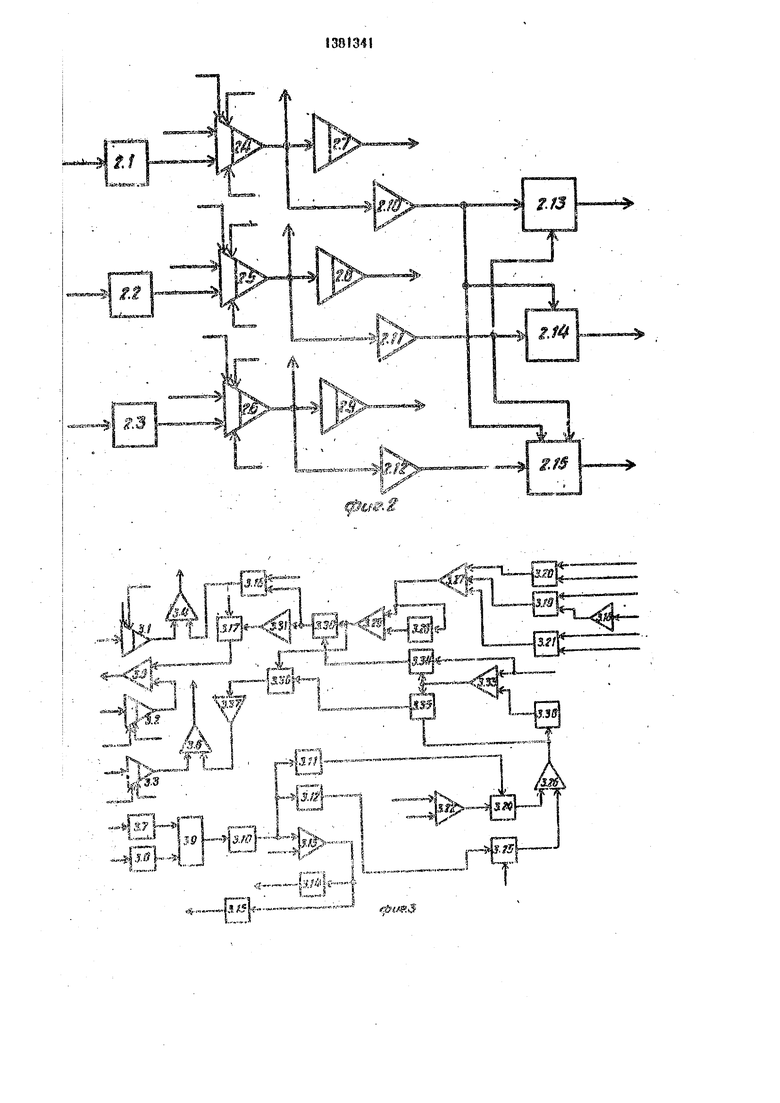
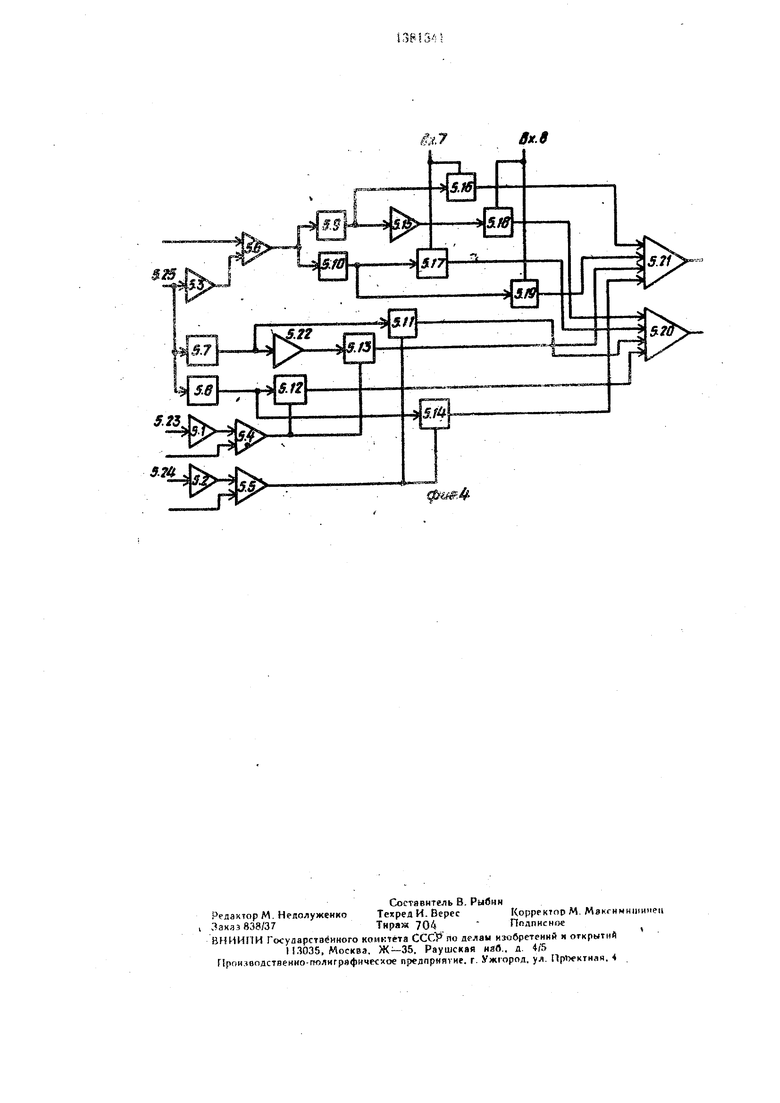
а фиг. i преястаолена блок-схема уст- ройстйа; на фиг. 2 -- блок-схема блока 2; на (|изг. .3 - блок-схема вычислители 3;jia фпг. 4 ,- блок-схема преобразователя 5. .Устройство содержит блок 1 синхронизации, блок 2 моделирооапия движения I телп, вычислитель 3 послеударного состол- 1 1нп тела, перпын задатчпк 4 текущей коор- I яйиаты контура тела, 1реобразопатель 5 I коордннаг контура тел;, второй задатчпк 6 I трку1нси коордииат1л контура тела, норпыи j задптмнк 7 координат преграды, перпый ком- 1 иаратор 8, пторой задатчик 9 координат I преграды, второй компаратор 10, элемент И 1, блоки 2 п 3 памяти. I Блок 2 содержит делители 2.1-2.3. сум- ; м 1руюн1ие иитеграгори 2.4--2.6, мптрграто- ; ры 2.7--2.9, И1 йертиру . усилители : 2.10-2.12, суммпторы 2.13--2.5. ; Вычислитель 3 содержит интегрирующие i усил1 тели 3.1-3.3, суммирующие ус1.; нтели 3.4--3.G, диффере1(и атори 3.7 i З.П, делитель 3.9, формироиатель 3.10 экспоненты, форуироиатель 3.11 фупкипа косинуса, фор- мирог ате.ль 3,12 ( У кции ci Hyca, суммирую- uuifi усилшель 3.13, формироизтель З.М синуса, формпрояптель 3.15 (jiyiiK- цни косипусз, умиожнтели 3.16 и 3..17 опера цпаипый усилитель 3,18, умножители 3.9 Л.21, гуммирующий усили.тель 3.22, источпик 3.2 J опорного напряжения, умтюжители 3. я 3.25, cyMMapyiqiuuH 3. 3.27, масштабный усилитель 3.28, сумМирую- . усилпте.ль 3.29, умножитель 3.30. ог.- рйционный уснлитель 3.3, сточиик 3. 32 опораого г зпр«жеиия, сумниругош.1и усилитель 3.33, д лптели 3.34 п 3.35, умножитель 3.3G. сперационный усилитель 3.37, кпал.- рзтор 3.38.
Преобразователь 5 содержит инверторы 5.1-5.3, сумматоры 5.4-5.6, синусный ире- образоцатель 5.7, ксснпусныи преобразова- тс.(1ь 5.8, преобрязоиатель 5.9, косинусный преобразо атель 5.0, пере.мио- житсли 5.11--5.14, инвертор 5.5, исремко- жители 5.1G--5.I9, сумматорь 5.20 и 5.2, инвертор 5.22, сточн ки ,.23--5.25 исстоян- ного иапрпжеиип.
Устройстпо работает следующим образом. Пусть Х|, УЬ фг - текущие коордяна- ты центра тяжести, it угол курсопого ра-а- сорота, отсчитгднаемые относительно яс- подопжиой (лемпой) систер,Ы координ,ат п ог1.)С 11Циесп г твердому телу; .Х|, yi. Ч ) --- текущие згьчченил скоростей нз,иеяеиия уно- мЯиутыя ппраметроп, xi«, yi« Ти -- sioc. уяариые значения скоростей изменений параметров; X, у - текущие координаты точки ко1ггурй тела, , И - текущие координаты 1 енодпижиой преграды, , ,-и., - текущие
5 коордниаты точки коНтура тела, взятые в соя.заииой с преградой системой координат. Коордннаты |i. т)| а общем случае вычислйг
, готся на следующим формулам:
П| {Х| -Х2)(У( -У2)5 пЧ 2 -f +xcosC4 ,-4 2)-ysin{4f,-n 2): ()
4i-- (xi -X5)sifiP3-i-{y,-уз) 15 ,4fj)-bycos(4,-V2). (2)
Блок 2 моделиропаннн те;1Е решает следуюн ие дифференциалыгыг уравнения:
гт1,х-,- F,i- .{3}
20 jn,,y,.p,.(4)
mipN i- Mb .(5)
где Fii, Fj,i, Mi силы и момент, приложенные к первому телу; т - масса первого, тела; 25PI - рзднус ииершш тела.
Вычислитель вычисляет послеударное состояние согласно следующим формулам:
xjK-nn xi-f 5 sinrp; У. З созфи M (
,(|dd|i,.
Х-- --Х|,ПфН-у1С05(р4-M lTi;
. Г| x cos$-f- ysina;
(6)
(7)
(8)
(9)
(10) (2)
9
i dy 45 ., «arctg i-.
(15)
r.iF,e K-- коэффициент восстановления скорости;
a, - угол между касптелыюй к конту- 50ру первого тела и горизонтальной
осью;
Ф-- угол между KBcatejibijoA и контуру неросго тела и иертиг альной осью. Роботу устройства рассмотрим ifa примере удара первого тела о неподвижную Г1 и грг1лу, поверхность которой абсолютно . ПЬд непоязижной преградой яол- pa.iyM -fiaercn пторое тело, положение коToporo в прострйнстпе фиксировжю. т.е. координаты центрл тяжести и угол кур. - вого разворота задаяы н постоянны {х, COnst, yj const, 4 const, Ф4. 0).
За счет действия сил РЧ, Fyi и момента Mj,
приложенных к телу, последнее непрерывно
меняет свое пространственное положение.
Сигналы , Ру|, MI поступают на входы сум- мирующих интеграторов 2.4, 2.5 и 2.6 соответч( Х|, У, хз, у2, Ч |, Ч д. характсрнзую- fUtiH пространственное положенир тел. вы- мнс/тет текущие координаты J,i, rji точки контура первого тгл-i в систгмр координат, связанной со вторым телом, т.е. преградой..
Вычисленные значения координат |i, т) по даются на вторые входы компараторов 8 и 0 соответственно. В идеальном случае п момент удара координаты i, ri С1 н рк-иро
ственно. При этом блок 2 моделирования Ю ванныезадатчиками 7 и9, и коордмг.аты |i, rji
движения тела в соответствии с уравиения- ми (3), (4), (5) на выходах суммирующих интеграторов 2.4, 2.5 н 2.6 формирует сигналы, пропорциональные инверсным значениям составляющих скорости центра тяжести тела , -У| и угловой, скорости и на выходах интеграторов 2.7, 2.8 и 2.9 формирует cигнaлFJ пропорциональные координатам центра тяжести xi, yi и углу курсового разворота . Группа сигналов A|, -yt. , поступает на входы вычислителя 3, а группа сигналов xi, yi, V - на входы преобразователя 5.
С момента включения устройства задат- чики 4 и 6 формируют на своих выходах сигналы, пропорциональные текущим координатам точек контура тела, а задатчики 7 и 9 - сигналы, пропорциональные координатам точек преграды.
Преобразователь 5 производит вычисление текущих координат точки контура перво15
вычислеиные преобразователем 5, совпадают с координатами точки соприкасания тел. Срабатывание компараторов 8 и К) приводит к срабатыванию элемента И 1 я связанного с ней блока 1.
На выходах блока 1 формируется одиночная серия последовательных импульсов и, R, и..
Импульсом и останавливается процесс решения дифференциальных уравнений, опн20 сывающих движение первого тела. При этом суммирующие интеграторы 2.4. 2.5 н 2.6, входящие в состав блока 2 и имеющие на. своих выходах величины X|j j l, Ч ь из режима «Интегрирование переводятся в реTJ. жим «Слежение.
Блоки 12 и 13 по сигналу U запоминй- ют мгновенные значения текущих координат точек контуров те.п х. у, а интегрирующие усилители 3.1, 3.2 и 3.3, входящие в состав вычислителя послеударного состояго тела в системе координат, связанной со яия тела, из режима «Слежение перевовторы м телом, т.е. с преградой.
.Алгоритм работы преобразователя 5 координат непосредственно следует из блок- схемы (фиг. 4), реализующей зависимости (1) и (2). Процессы формирования и преобдятся в режим «Запомкнаняе и з.апоми- иают значения величин Xi.yi, Ч ), имеющихся на данный момент на выходах суммирующих интеграторов. 2.4. 2.5 н 2.6.
Значения величин х, у запомненных блоразования координат -осуществляются не- aj ками 12 и 3, соответствуют точке сопрнка
прерывно. При этом координаты точек контуров . тел формируются последовательно в направлении корма-левый борт - нос - правый) борт - корма - левый борт -- нос и т.д.
Задатчики 4.6 и 7.9 непрерывно формируют соответственно текущне значения координат точек контуров первого и второго тел X, у. &, л.
За первую половину цикла идентифицисания первого тела я пр{-:,-ады. Вычислитель 3 послеударного состояния тел в соответствии с соотношениями (6) - (15) определяет послеударное состояние первого дела, характеризуемое велячкнамп х п, yi. . 40 Блок-схема, реализующая алгоритм вычисления согласно (6)), приведена на фиг. 3.
После вычисления величин xi«, у |« Fi, а также после установки последних в качеструются точки контура левого борта в нап- ве начальных условий суммирующих ннтеграr ft nl lIIItZ .t 1/ .l о O O ЛЛ InO f . ОЛ- ОС tJ Ofi л ft о ГЧЛГ-ИППГЧйв
равлеиии от кормы к носу, а затем (за вторую половину цикла) идентифицируются точки контура правого борта в направлении от иоса к корме. Такое направлеиие обе- гання контуров (по хсау часовой стрелки) сохраняется в дальне шем для последующих циклов. Координаты х, у точек контура первого тела подаются на входы преоб- . разователя 5 и на входы блоков 12 и 13, а координаты I, ri точек контура второго тела, т.е. преграды, подаются на первый входы компараторов 8 и 10.
Преобразователь 5 .по значениям х, у, характеризующим текущее положение точки на контуре первого тела, а также по знаторов 2.4, 2.5 и 2.6 блока 2 сигналом блока 1 блоки 12, 13 и интегрирующие усилители 3.1, 3.2 н 3.3 вычислителя 3 послеударного состояния тел возвращаются в режим «Слежение, а суммирующие ннтегра50 торы 2.4, 2.5, 2.6 - в режим «Интегрирование. С некоторым интервалом сигналом О блока I осуществляется «Пуск суммирующих интеграторов 2.4, 2,5 и 2.6 блока 2. Моделирование движения первого тела теперь производится при новых начальных
55 условиях, равных вычисленным величинам its У|«, i. которые отличаются от их доударных значений. В этом и заключается суть моделирования ударного эффекта. Дяльч( Х|, У, хз, у2, Ч |, Ч д. характсрнзую- fUtiH пространственное положенир тел. вы- мнс/тет текущие координаты J,i, rji точки контура первого тгл-i в систгмр координат, связанной со вторым телом, т.е. преградой..
Вычисленные значения координат |i, т) подаются на вторые входы компараторов 8 и 0 соответственно. В идеальном случае п момент удара координаты i, ri С1 н рк-иро
ванныезадатчиками 7 и9, и коордмг.аты |i, rji
15
вычислеиные преобразователем 5, совпадают с координатами точки соприкасания тел. Срабатывание компараторов 8 и К) приводит к срабатыванию элемента И 1 я связанного с ней блока 1.
На выходах блока 1 формируется одиночная серия последовательных импульсов и, R, и..
Импульсом и останавливается процесс решения дифференциальных уравнений, опн20 сывающих движение первого тела. При этом суммирующие интеграторы 2.4. 2.5 н 2.6, входящие в состав блока 2 и имеющие на. своих выходах величины X|j j l, Ч ь из режима «Интегрирование переводятся в реTJ. жим «Слежение.
Блоки 12 и 13 по сигналу U запоминй- ют мгновенные значения текущих координат точек контуров те.п х. у, а интегрирующие усилители 3.1, 3.2 и 3.3, входящие в состав вычислителя послеударного состоя яия тела, из режима «Слежение перевояия тела, из режима «Слежение переводятся в режим «Запомкнаняе и з.апоми- иают значения величин Xi.yi, Ч ), имеющихся на данный момент на выходах суммирующих интеграторов. 2.4. 2.5 н 2.6.
Значения величин х, у запомненных блоaj ками 12 и 3, соответствуют точке сопрнка
сания первого тела я пр{-:,-ады. Вычислитель 3 послеударного состояния тел в соответствии с соотношениями (6) - (15) определяет послеударное состояние первого дела, характеризуемое велячкнамп х п, yi. . 40 Блок-схема, реализующая алгоритм вычисления согласно (6)), приведена на фиг. 3.
После вычисления величин xi«, у |« Fi, а также после установки последних в качестве начальных условий суммирующих ннтеграff t. ОЛ- ОС tJ Ofi л ft о ГЧЛГ-ИППГЧйв
торов 2.4, 2.5 и 2.6 блока 2 сигналом блока 1 блоки 12, 13 и интегрирующие усилители 3.1, 3.2 н 3.3 вычислителя 3 послеударного состояния тел возвращаются в режим «Слежение, а суммирующие ннтеграторы 2.4, 2.5, 2.6 - в режим «Интегрирование. С некоторым интервалом сигналом О блока I осуществляется «Пуск суммирующих интеграторов 2.4, 2,5 и 2.6 блока 2. Моделирование движения первого тела теперь производится при новых начальных
условиях, равных вычисленным величинам its У|«, i. которые отличаются от их доударных значений. В этом и заключается суть моделирования ударного эффекта. ДяльiijpRiDpe дпяжрпяс первого теля опрсдг лп- ( jrcn nffictnywuJiiMii на негосиламп и мо- ИРИТОМ.
i По cpnniiciiiiK) с избсстиым ирсллаглемоф тЬхпмческое решеипе позволяет попыспть 1М П1ость лосгопсрпостя молрлиропапип удя- .
.Формула изобретения
I Устройство алп моделиропа1шя удара те- J а о йрподвпжную преграду, содержящее гррвый и второй компараторы и блок снИхропизацпн, отличающеесп тем, что, с 1елью noBbiuieiiiin точности, о лсго пведсяы Лемеиты И, первый к второй блоки и, дпа задатчика текущей координаты кояту- )а тела, дпп задатчика координат -коитура е11одпиж ой преграды, преобразпнотель ко- )рД(П1ат контура тела, состоящий из пяти nuicpTopon, сумматоров, послзми пере- пюжятрлен, двух синусных прсобразонате- пей, двух Kcciinyciibix преобразопателеи и рех источников постоянного иапря исн Я, )лок иодсл ройанип дпижепня тела, состоя- ций 13 трех делителей, трех сумннрую- lUix tiHTCrpaTOpon, трех мптеграторов, трек ишертнруюш,нх усилителей и.трех сул мато- , оычислитель послеударного cocTosunin, cs)CToisuu H из трех интегрирующих усилгь слей, девяти суммирующих усилителей, деаятн умножителей, квадратора, трех оп.ерацноинмх усилителей, трех делителей,- днук дифференциаторов, дпух формирапя- гелей фуикцпн cisisyca, доух формпракатс- леГ функция косипуса, формироийтеля экспоненты, масштабного усил 5теля и двук псточппков опорп огр 1 апряже П я, причем :шхол элене- та И подюгючеи к пходу запуски блока С1И хрО 1изаини, первый пыход которого соединен с входами останова первого, вто- р(5го и третьего суммпруюишх ннтеграто- i ров; с сходами запнсн первого и пторого : блоков па5.нти с входами останова псрдом пторого блоня памяти, пыход которого подключен к пхолу пторого диффереиниато- ро и к нерпому входу первого умножителя, выходы второго, третьего и четвертого сум- мируюн1их усилителей соединены с первыми информационными пходами соответственно первого, пторого и третьего суммирующих иитегрпторов, выходы которых подключены к ииформаияоииЕям входам соответственно первого, пторого и третьего интегрирующих усилителей, выходы первого, пторого и третьего интеграторов соединены с первыми входами cooTBeTcfricHno первого, второго н третьего сумматоров, пыходы четвертого и питого сумматоров подк/1ючены к первым входам соответственно первого и- пторого компаратороп, выходы перього и второго задатчикоо координат контура непод- г, преграды соединены с вторыр,«и входами соответственно первого и пторого компараторов, выходы которых подключены соответственно к первому и второму входам элемента И, выход третьего ните1ра- тора соединен с первым входом пятого суммирующего усилителя, выход первого интегрирующего усилителя непосредственпо соединен с первым входом второго суммирующего усилителя ч через первый операционный усил1 тель подключен к. первому входу нторого умножителя, пыход которого соеди-. ней с первым входом шестого суммирующего усилителя, выход которого непосред- ствещю подключен к tiepcoMy входу седьмого суммиругонлего усилителя и через масштабный усилитель соедн1гея с вторым входом седьмого суммирующего усилителя, выход которого-иодключе} к первым входам третьего и четвертого умножителей, выход третьего умножителя соединен с входом второго операционного усилителя и с первйм входом пятого умножителя, выход котортэго подключея к второму входу второго суммирующего усилителя, выход второго интегрирующего усилители соединен с первым , i треты;го иптегрнрующпх 40 дом третьего суммирующего усилителя и i
уснлитслсП, второй пыход блока сннхрон} - зациз; подключен к входам начзлыюГ уста- попк первого, оторого п третьего су мнрую- щмх иптегрйтороп, к входам считыва П я первого п второго блоков памяти и к входам иачальисГ установки первого, второго и треты го 1 тегрирую1инх усилителей, тргшй выход блока синхронизации соеднме с входами запуска первого, второго и третьего суммирующих китегратороа, выход nspuoro
45
первым входом шестого умножителя, выход которого подключен к второму входу шестого сумн 1рующ,его усилителя, выход второго операциониого усилителя соединен с первым входом седьмого умножителя, выход .которого подключен к второму входу третьего суммирующего усилителя, выход третьего иптегри-руюнхего усилнтел я соединен с первым входом четвертого суммирующего усилителя и с первым входом восьмого умножидом пторого блоня памяти, пыход которого подключен к пхолу пторого диффереиниато- ро и к нерпому входу первого умножителя, выходы второго, третьего и четвертого сум- мируюн1их усилителей соединены с первыми информационными пходами соответственно первого, пторого и третьего суммирующих иитегрпторов, выходы которых подключены к ииформаияоииЕям входам соответственно первого, пторого и третьего интегрирующих усилителей, выходы первого, пторого и третьего интеграторов соединены с первыми входами cooTBeTcfricHno первого, второго н третьего сумматоров, пыходы четвертого и питого сумматоров подк/1ючены к первым входам соответственно первого и- пторого компаратороп, выходы перього и второго задатчикоо координат контура непод- г, преграды соединены с вторыр,«и входами соответственно первого и пторого компараторов, выходы которых подключены соответственно к первому и второму входам элемента И, выход третьего ните1ра- тора соединен с первым входом пятого суммирующего усилителя, выход первого интегрирующего усилителя непосредственпо соединен с первым входом второго суммирующего усилителя ч через первый операционный усил1 тель подключен к. первому входу нторого умножителя, пыход которого соеди-. ней с первым входом шестого суммирующего усилителя, выход которого непосред- ствещю подключен к tiepcoMy входу седьмого суммиругонлего усилителя и через масштабный усилитель соедн1гея с вторым входом седьмого суммирующего усилителя, выход которого-иодключе} к первым входам третьего и четвертого умножителей, выход третьего умножителя соединен с входом второго операционного усилителя и с первйм входом пятого умножителя, выход котортэго подключея к второму входу второго суммирующего усилителя, выход второго интегрирующего усилители соединен с первым вхо5
первым входом шестого умножителя, выход которого подключен к второму входу шестого сумн 1рующ,его усилителя, выход второго операциониого усилителя соединен с первым входом седьмого умножителя, выход .которого подключен к второму входу третьего суммирующего усилителя, выход третьего иптегри-руюнхего усилнтел я соединен с первым входом четвертого суммирующего усилителя и с первым входом восьмого умножи
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования удара твердых тел | 1988 |
|
SU1567889A2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ФУНКЦИЙ РАСПРЕДЕЛЕНИЯ ПОТОКОВ СООБЩЕНИЙ И СОСТОЯНИЯ СЕТИ ПЕРЕДАЧИ ДАННЫХ, РЕАЛИЗУЮЩЕЙ РАЗЛИЧНЫЕ ДИСЦИПЛИНЫ ОБСЛУЖИВАНИЯ СООБЩЕНИЙ В МНОГОЛИНЕЙНЫХ И ОДНОЛИНЕЙНЫХ ЦЕНТРАХ | 2020 |
|
RU2755260C1 |
| УСТРОЙСТВО ДЛЯ РАСЧЕТА ФУНКЦИЙ РАСПРЕДЕЛЕНИЯ ПОТОКОВ СООБЩЕНИЙ НА ОСНОВЕ ОЦЕНОЧНЫХ ДАННЫХ ПАРАМЕТРОВ СИСТЕМ ИНФОРМАЦИОННОГО ОБМЕНА | 2020 |
|
RU2767463C2 |
| УСТРОЙСТВО ВЫЧИСЛЕНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ИНТЕГРАЛЬНОГО ПОКАЗАТЕЛЯ | 2017 |
|
RU2661749C1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 2008 |
|
RU2366047C1 |
| УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2013 |
|
RU2525299C1 |
| Электронная модель удара | 1977 |
|
SU658575A1 |
| Устройство для определения параметров главного потокосцепления машины переменного тока | 1985 |
|
SU1319219A1 |
| Устройство для выделения прямолинейных элементов контура изображения | 1988 |
|
SU1628069A1 |
| ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ИСТИННОСТИ ПЕРЕСЕЧЕНИЯ ПЕЛЕНГОВ | 1994 |
|
RU2084914C1 |
Изобретение относится к области вычислительной техники и может быть использовано при имитации движения транспортных средств в условиях иаличия в зоне движения неподвижных преград. Целью изобретения является повышение точности и достоверности моделирования удара за счет воспроизведения движения второго тела и удара внешних контуров твердых тел в любой точке, их зоны движе- .ния. Устройство содержит блок синхронизации, блок моделирования движения тела, вычислитель послеударного состояния, за- датчики текущих коорлинат контура тела, преобразователь координат, компараторы. эадатчик координат преграды, элемент И и блоки памяти. 4 ил.
задатчика текущей коордниать контура телп . теля, выход которого подключен к третьему
подключен к 1ервь ы входам iiepBoro п кто- -
рого персмпожителеП п к информационному входу первого блока памлтп, выход которого соединен, с «ходом lepnoro дпффсрен- ииатора не первым входом первого суммивходу шестого суммирующего усилителя, выход четвертого умпожителя через третий операционный усилитель сседянен с вторым входом четвертого суммирующего усилителя, выходы первого н второго дифференцияторующсго усилителя, выход второго задзтчн- ij ров подключены соотр((но к первому н ка т . Кущей к(Ю)дчиаты контура тела второму вх бдам первого делителя, выход которого подключен к входу формирователя экс-- понепты, выход которого гогдияен с входам
НРН с tiepBiJwii пхоламп третьего и четвертого перемножпт4 л5 П и с иаформацногным a :oтеля, выход которого подключен к третьему
-
входу шестого суммирующего усилителя, выход четвертого умпожителя через третий операционный усилитель сседянен с вторым входом четвертого суммирующего усилителя, выходы первого н второго дифференциятоЛервого формиройзтсля функции синуса и первого формирователя функции косннугг; , вторым Входом пятого суммирующего .-,.. теля, выход которого полключеи к зчо-;; ч второго формирователя функций скнуса и второго формирователя функиии косинуса. выход первого формирования функции косн- иуса подключен к первому входу девятого умножителя, выход которого соединен с первым входом восьмого суммирующего усилителя, выход которого подключен к второму входу восьмого умиожителя, к входу квадратора и к первому входу второго делителя, выход которого соединен с вторым входом четвертого умножителя, выход квадратора подключен к первому входу девятого суммирующего усилителя, выход первого источника опорного напряжения соединен с первым входом третьего делителя и с вторым входом девятого суммирующего усилителя, выход которого подключен к вторым входам второго и третьего делителей, выход третьего делителя соединен с вторым входом третьего умножителя, выход второго формирователя функции синуса подключен к второму входу первого умножителя, выход которого соединен с -вторым входом восьмого суммирующего усилителя, выход второго источника опорного напряжения подключен к второму входу первого суммирующего усилителя, выход второго операционного усилителя соединен с первым входом седьмого умножителя, выход второго формирователя функции сннуса подключен к вторым входам второго и пятого умножителей, выход.второго формирователя функции косинуса соединен с вторыми входами шестого и седьмого умножителей, выходы первого, второго и третьего сумматоров подключены к входам соответственно первого, второго и третьего делителей, выходы которых соединены с вторыми информационными входами соответственно первого, второго и третьего суммирующих усилителей, йыходы которых подключены к входам соответственно первого, второго и третьего инвертирующих усилителей, выход первого инвертирующего усилнтеля соединен с первы0
5
0
5
0
5
0
Ми входами первого, второго и трртьсгч гуы М-- оров, выход второго нир.сртирующ .то усилителя соелингк с вторыми вхоламн первого, второго и третьего сумматоров, ви«ол третьего инвертирующего угмлите.я пел- ключей к третьему входу третьего сум««з- тора, выход первого источника постоянного напряжения через первый инвертор подключен к второму входу первого , выход которого соединен с первччк вхп дамн пятого к шестого nep€Mh a: r HTej pS, выходы которых подключены к первые вхо дам соответственно четвертого и гятого сумматоров, выход второго источника посто янногЬ напряжения через второй инвертор соединен с вторым входом второго сумматора, выход которого подключен к кр- вым входам седьмого и восьмого переино- жителей, выходы которых соединены с вто- рымн входами соответственно четвертого я пятого сумматоров, выход третьего источника постоянного напряжения непосредственно подключен к входам первых синусного и косинусного преобразователей, а через третий ннвертор соединен с вторым входом третьего сумматора, выход которого соеднкен с входами вторых синусного и косинусного преобразователей, выход первого синусного преобразователя кепосрелствеино соединен с вторым входом восьмого перемгзсжй- теля, а через четвертый ннвертор чен к ьторому входу пятого пе(емножкте- ля, выход первого косинусного п|; еобразо- вателя соединен с вторыми входами шестого И седьмого перемнохчктелей, выхвд второго синусного преобразователя кепосред- ственно соединен с вторым входом первого перемножнтеля н через шестой инвертор подключен к второму входу третьего перемножнтеля, выход второго косинусного преобразователя соединен с вторыми входами второго и четвертого переыножителей, выходы которых подключены к третьнм входам соответственно пятого-и четвертого сумматоров, четвертые входы которых соедкнены с выходами соответственно третьего и первого переключателеА.
4j.i ,. ,.™«..J
зм
а. 9
| ЭЛЕКТРОННАЯ МОДЕЛЬ УДАРА | 0 |
|
SU205387A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Электронная модель удара | 1971 |
|
SU438024A1 |
| кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство станционной централизации и блокировочной сигнализации | 1915 |
|
SU1971A1 |
