Изобретение относится к вычислительной технике и может быть использовано при построении навигационных систем,
Цель изобретения - упрощение устройства.
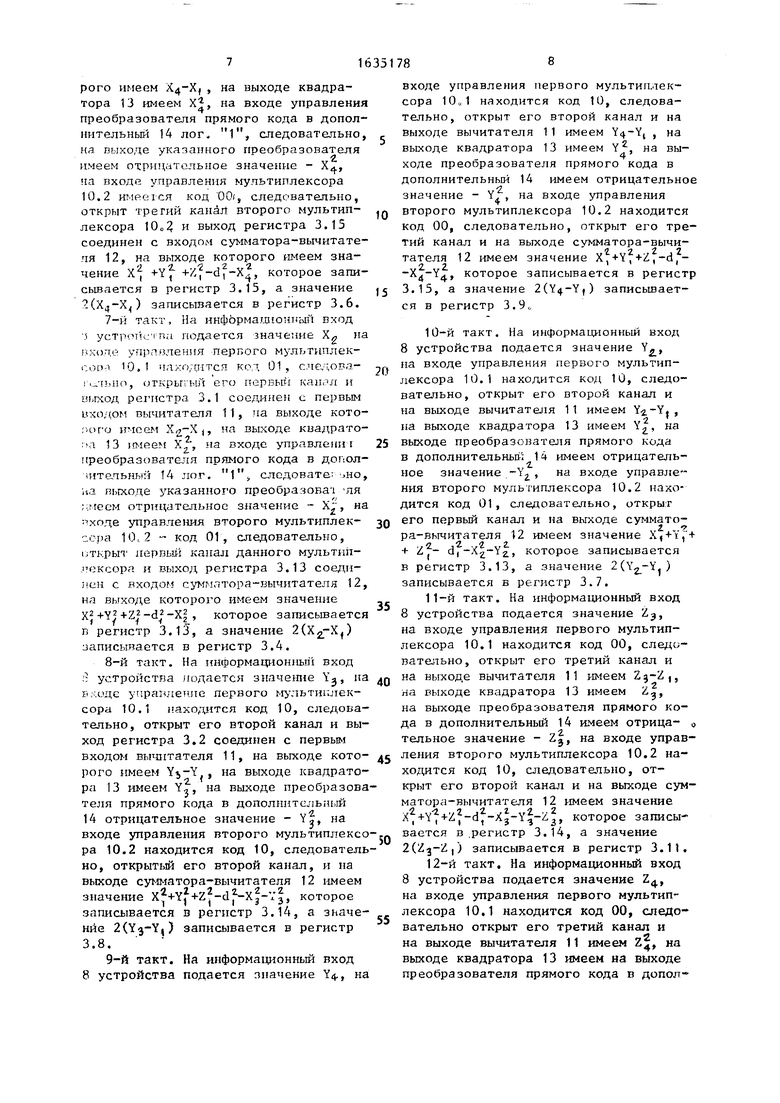
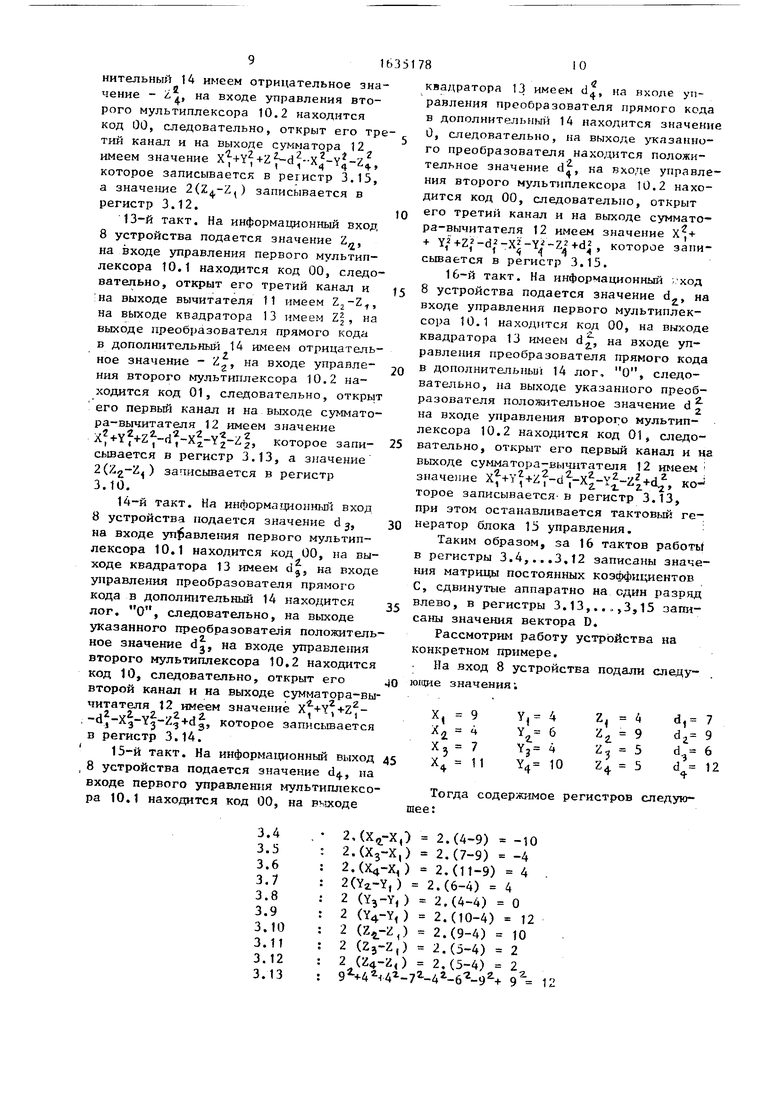
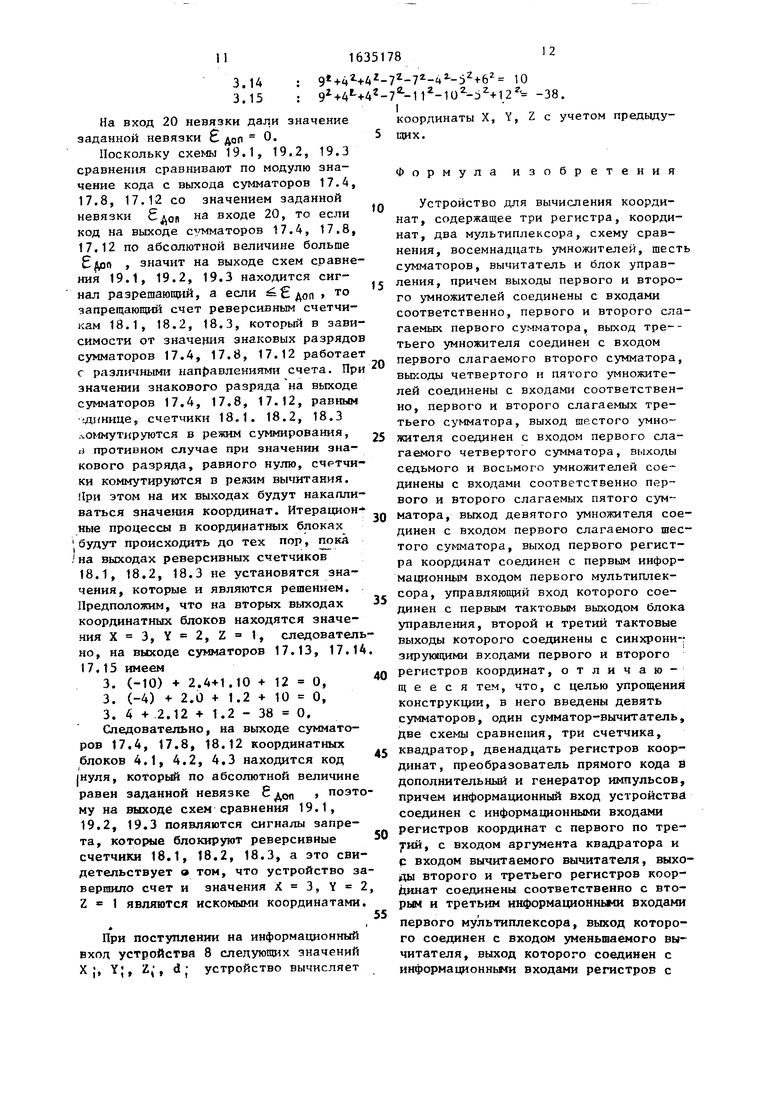
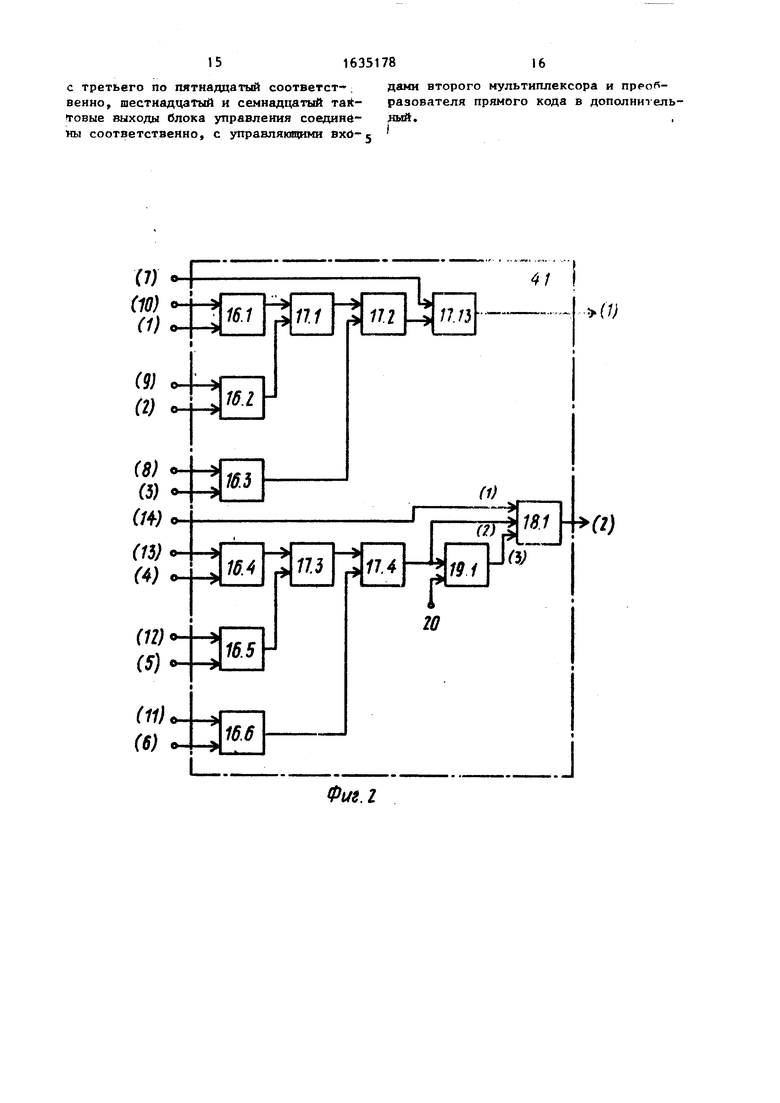
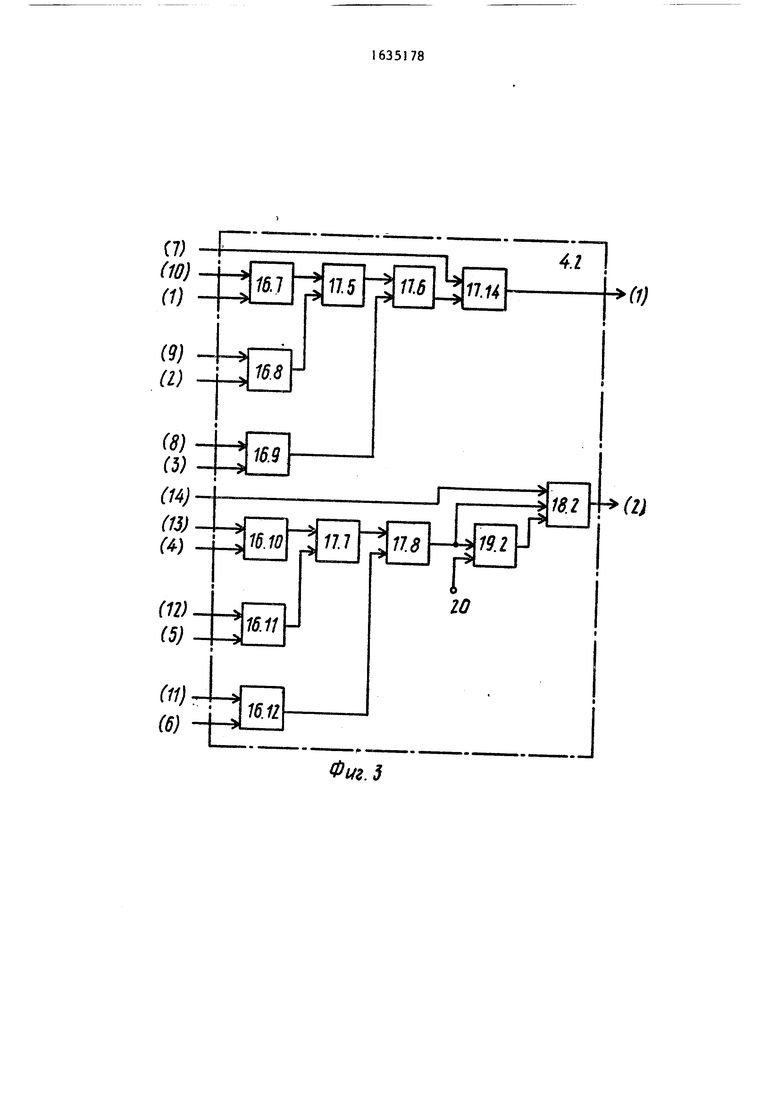
На фиг. 1 представлена функциональная схема устройства; на фиг. 2, 3 и 4 - функциональные схемы соответст- веино первого, второго и третье о координатных блоков.
Устройство содержит генератор 1 ичпульсов, первый и второй блоки хранения координат 2.1 и 2.2,.регистры координат 3.1,...,3.15 соответствен- 1т с первого по пятнадцатый, коорди- t пые. Олоы -.1, 4.2 и 4.3 :.оотвег- с пенно с первою по третий, выходы 5, 0 и 7 соответственно с первого по ij чип, информационный вход 8, блок 9 данных, первый и второй мудьтнллек- Icopt. 10.1 и 10.2, вычитатель 11, сум- .тор-вычитатель 12, квацрятор 13,
.образователь 1А прямого кода в дг-
ьолнителышй, блок 16 управления.
.:рный координатный блок 4.1 соде жит
j. чножителн 16.1,. ..,16.6 соответствен: i- первого по шестой, сумматоры
17.1, 17 „2, 17.3, 17.4 соответствен-
.j первого по четвертый, тринадцатый сумматор 17.13, первый счетчик
3.1, первую схему 19.1 сравнения. ысрой координатный блок 4.2 содержит умножители 16.7,..«,16.12 с седьмого по двенадцатый, сумматоры 17.5; 17.6; 17.7; 17,8 соответственно с пятого по восьмой, четырнадцатый сумматор 17.14 счетчик 18.2, вторую схему 19.2 сравнения. Третий координатный блок 4.3 содержит умножители 16.13,...,16.18,с грицэднатого по восемнадцатый, сумматоры 17.9, 17.10; 17,11; 17,12 соответственно с девятого по двенадцатый, пятнадцатый сумматор 17.15, третий счетчик 18.3, третью схему 19.3 сравнения. Координатные блоки 4.1, 4.2, 4.3 содержат вход 20 ошибки Устройство функционирует следующим образом.
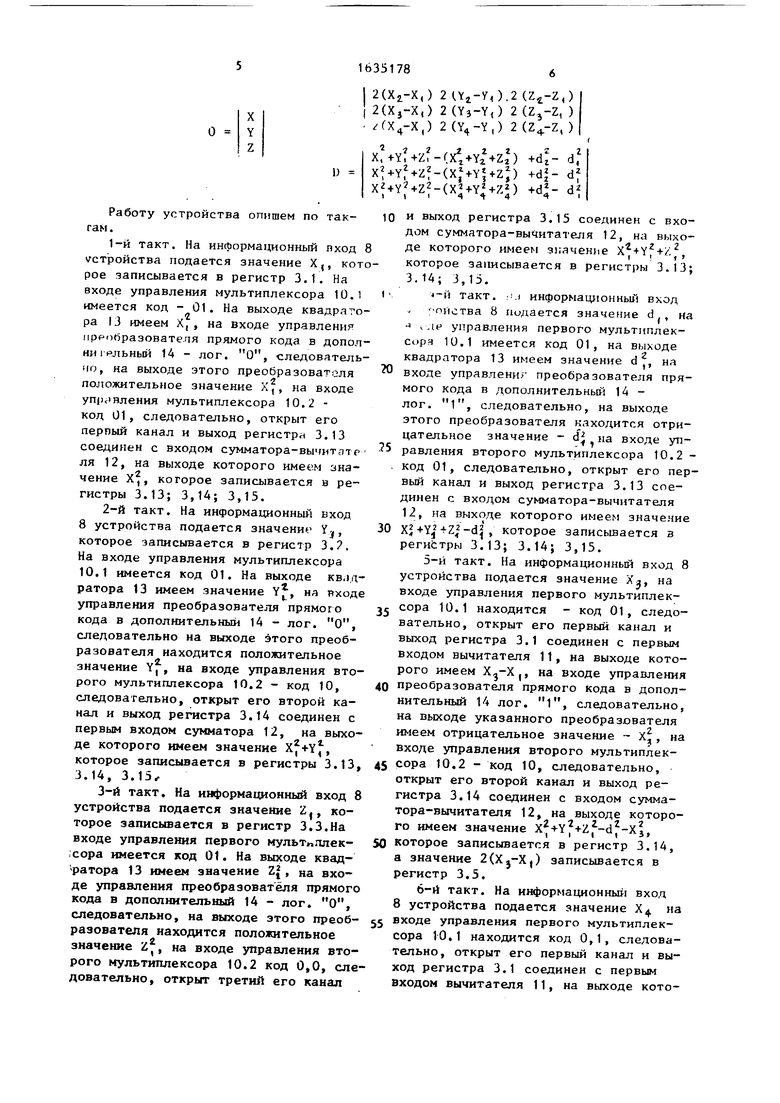
Предлагаемое устройство определяет координаты подвижного объекта разност- но-дальномерным методом путем решения
системы нелинейных навигационных уран нений
d (Х;-Х )%(Y;-Y)2+(Z;-Z/+b,
где i 1,...,4, d, - псевдодальность до i-того искусственного спутника Земли (ИСЗ), Х|, Y,, Z - координаты i-того ИСЗ; X, Y и Z - искомые координаты подвижного объекта во время замера псевдодальности d и заданных координат X;, Y,-, Z;, b с Л Т - систематическая ошибка измерения дальности, вызванная уходом частоты генератора аппаратуры на подвижном объекта; с - скорость света; А Т - систематическое расхождение временных шкал МСЗ и подвижного объекта (за время измерения Д Т должно быть постоянным) , на i-том шаге определения координат представленная система нелинейных навигационных уравнений приводится системе линейных алгебраических уравнений
d,-d,+2(X,-X,)X+2(Yj+l-Y,)Y + +2(ZJtl-Z,)Z ( ,
где j 1,2,3; aj- дальность от начала координат до j-ro ИСЗ.
Для обеспечения сходимости процесса уравновешивания при произвольном изменении координат ИСЗ, образующих матрицу постоянных коэффициентов с, вычислительный процесс организован в соответствии со следующим матричным уравнением
ст (с 0 + D) Ј,
Ј - мин
где С - матрица постоянных коэффициентов, образованная из разностей координат ИСЗ; Т - знак транспортирования матрицы; С « 0 - вектор с искомыми координатами подвижного объекта; D - вектор с компонентами, пропорциональными разности дальностей между ИСЗ и подвижным объектом. Уравновешивание в моделирующей системе предлагаемого устройства основано на вычислении знаковой функции Ј вектора невязки 6 .
L
2(Xt-X,) 2 lYt-y4).2(ZЈ-Zj 2(Xj-X,) 2(Y3-Y) 2 (Z3-Z, ) ЛХ4-Х,) 2(Y4-Y,) 2(Z4-Z, )
(X +Ya+zb +dz- df
X -t-Yf-t-Zf-(XJz4-Y|+zJ)
XZ+Y«+Z2-()
df - «И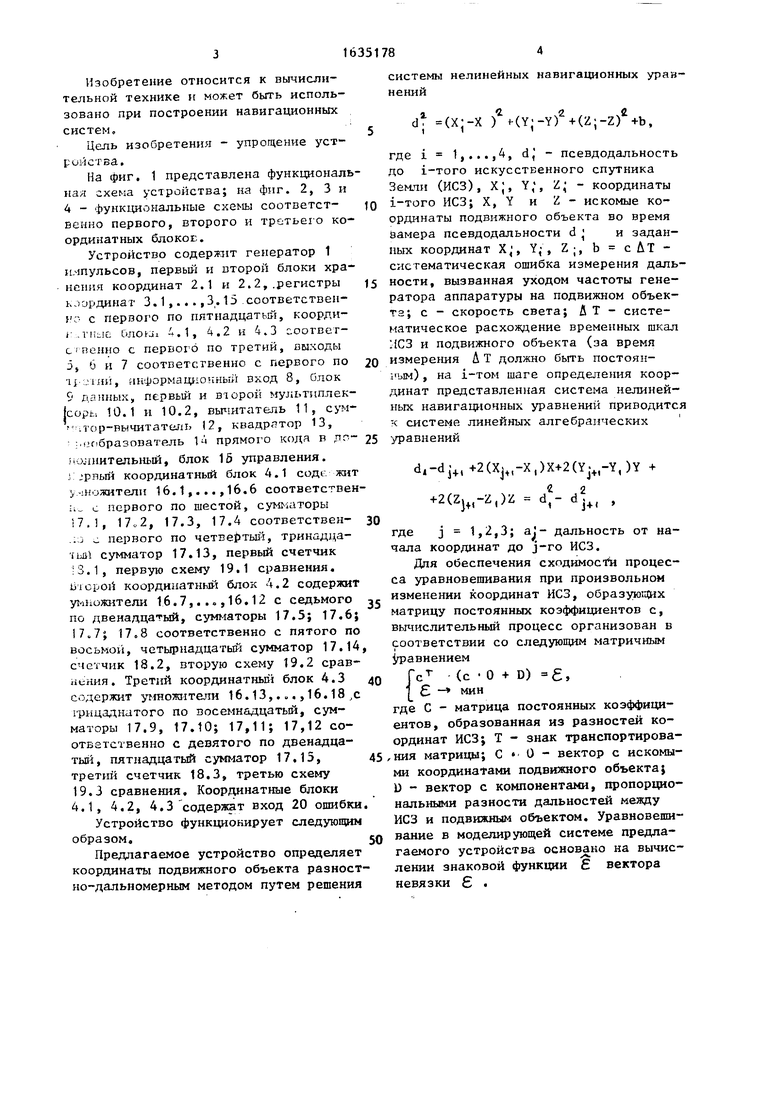
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения фазовых сдвигов | 1984 |
|
SU1226341A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТЕЛЕВИЗИОННОГО ИЗОБРАЖЕНИЯ С ИЗМЕНЕНИЕМ МАСШТАБА УПРАВЛЯЕМОГО ФРАГМЕНТА | 1993 |
|
RU2065206C1 |
| Преобразователь координат | 1988 |
|
SU1645951A2 |
| СПОСОБ ШИФРОВАНИЯ/ДЕШИФРОВАНИЯ СООБЩЕНИЙ ХЭШИРУЮЩЕЙ ФУНКЦИЕЙ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 1998 |
|
RU2138126C1 |
| Цифровой квадратичный интерполятор | 1985 |
|
SU1290354A1 |
| Устройство для управления процессом намотки | 1986 |
|
SU1390618A1 |
| Устройство для вычисления элементарных функций | 1990 |
|
SU1809439A1 |
| Устройство для преобразования координат | 1990 |
|
SU1800455A1 |
| СПОСОБ ФОРМИРОВАНИЯ ПОСТОЯННЫХ РАЗМЕРОВ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ В ПЛОСКОСТИ УПРАВЛЯЕМОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2093849C1 |
| Устройство обнаружения и определения координат объекта на изображении | 1990 |
|
SU1737755A1 |
Итооретение относится к вычислительной технике и быть использовано при построении навигационных систем. Целью изобретения является упрощение конструкции. Устройство содержит генератор | импульсов , первый и гто- рои олоки 2.; 2.2 координат, регистры 3.1,...3,15 координат соответственно с первого по пятнадцатый, координатные олоки ч.1; 4.2 и 4.3 соответственно с первого по третий, выходы э, 6, 7. информационный вход 8, блок У данных, первый и второй мультиплексоры 10.1 и 10.2, вычитатель 11, сум- матор-вычитатель 12, квадратор 13, преобразователь 14 прямого кода в дополнительный, блок 15 управления. 4 ил. i g оэ оо ел J 00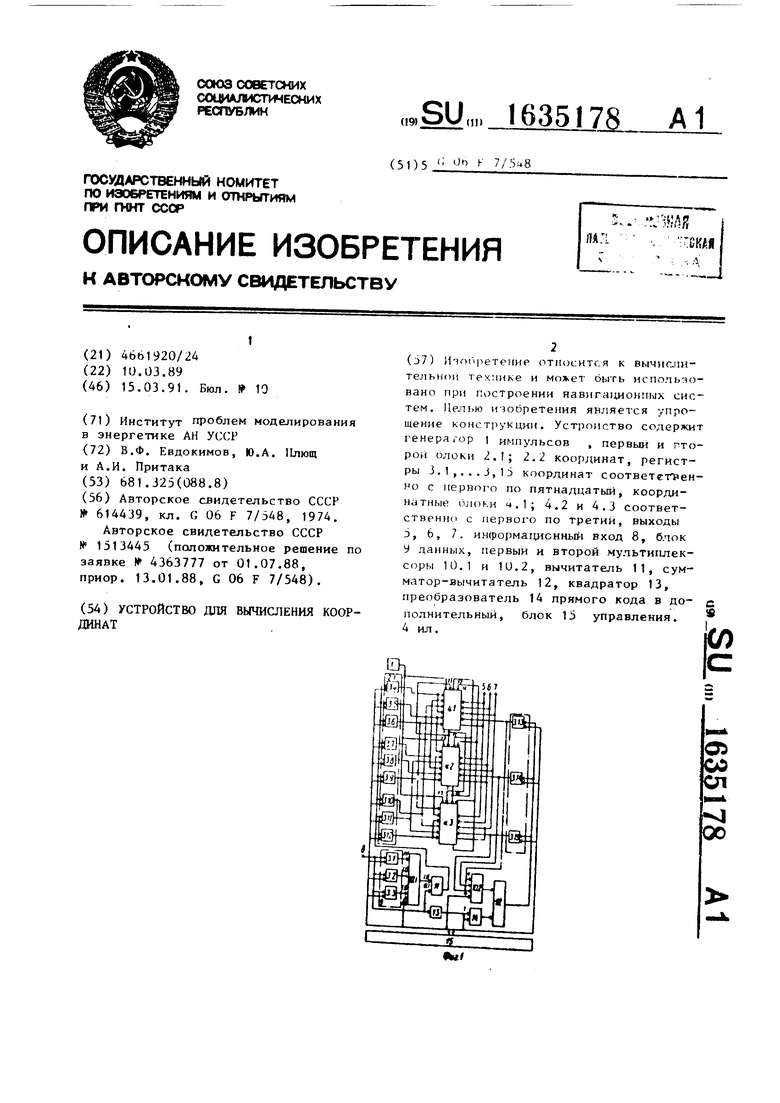
Работу устройства опишем по так- гам.
1-й такт. На информационный пход 8 устройства подается значение Х, которое записывается в регистр 3.1. На входе управления мультиплексора 10.1 имеется код - 01. На выходе квадрлгод
ра 13 имеем X,, на входе управления прробразоватепя прямого кода в дополни i ель ный 14 - лог. О, следователь
но, на выходе этого преобразователя положительное значение X,, на входе управления мультиплексора 10.2 - код 01, следовательно, открыт его перпый канал и выход регистр 3.13 соединен с входом сумматора-вычитлтр ля 12, на выходе которого имеем значение Х, которое записывается в регистры 3.13; 3,14; 3,15.
2-й такт. На информационный вход 8 устройства подается значение YJ, которое записывается в регистр 3., На входе управления мультиплексора 10.1 имеется код 01. На выходе квадратора 13 имеем значение Y, на входе
,г I-
управления преобразователя прямого кода в дополнительный 14 - лог. О, следовательно на выходе этого преобразователя находится положительное значение Y, , на входе управления второго мультиплексора 10.2 - код 10, следовательно, открыт его второй канал и выход регистра 3.14 соединен с первым входом сумматора 12, на выходе которого имеем значение , которое записывается в регистры 3.13, 3.14, 3.15,
3-й такт. На информационный вход 8 устройства подается значение Zj, которое записывается в регистр 3.3.На входе управления первого мультиплексора имеется код 01. На выходе квадратора 13 имеем значение Ъ, на входе управления преобразователя прямого кода в дополнительный 14 - лог. О, следовательно, на выходе этого преобразователя находится положительное значение Z, на входе управления второго мультиплексора 10.2 код 0,0, следовательно, открыт третий его канал
f 3.13;
и выход регистра 3.15 соединен с входом сумматора-вычитателя 12, на выходе которого имеем значение X +Yf+Z которое записывается в регистры 3.14; 3,15.
j-ri такт, ij информационный вход онства 8 подается значение d , на лс управления первого мультиплек- сорч 10.1 имеется код 01, на выходе квадратора 13 имеем значение d , на входе управление преобразователя прямого кода в дополнительный 14 - лог. 1, следовательно, на выходе этого преобразователя находится отрицательное значение - d на входе управления второго мультиплексора 10.2 - код 01, следовательно, открыт его первый канал и выход регистра 3.13 соединен с входом сумматора-вычитателя 12, на выходе которого имеем значение XJ+YJ+Zj-d2, которое записывается з регистры 3.13; 3.14; 3,15.
5-й такт. На информационный вход 8 устройства подается значение Хз, на входе управления первого мультиплексора 10.1 находится - код 01, следовательно, открыт его первый канал и выход регистра 3.1 соединен с первым входом вычитателя 11, на выходе которого имеем ,, на входе управления преобразователя прямого кода в дополнительный 14 лог. 1, следовательно, на выходе указанного преобразователя
- xi
на
имеем отрицательное значение , входе управления второго мультиплексора 10.2 - код 10, следовательно, открыт его второй канал и выход регистра 3.14 соединен с входом сумматора-вычитателя 12, на выходе которого имеем значение X +Y +zf-d -X,
которое записывается в регистр 3.14, а значение 2(Xj-Xj) записывается в регистр 3.5.
6-й такт. На информационный вход 8 устройства подается значение Х из
входе управления первого мультиплексора 10.1 находится код 0,1, следовательно, открыт его первый канал и выход регистра 3.1 соединен с первым входом вычитателя 11, на выходе которого имеем 4( на выходе квадратора 13 имеем X, на входе управления преобразователя прямого кода в дополнительный 14 лог, 1, следовательно,
на выходе указанного преобразователя имеем отрицательное значение - Х., ча входе управления мультиплексора 10.2 имеемся код OOi, следовательно, открыт третий канал второго мультиплексора 10о2 и выход регистра 3.15 соединен с входом сумматора-вычитате- чя 12, на выходе которого имеем значение Х +Y +X -df-Xx, которое записывается в регистр 3.15, а значение (Х4-Х4) записывается в регистр 3.6. 7-й такт, На информационный вход 1 i па подается значение Хд на | -;огго упржзлечия первого мультиплексор IQ. I находится кот. 01, счедова|.тыю, открытый его первый и выход регистра 3.1 соединен с первым входом вычитателя 11, па выходе которого имеем Х,г-Х,, на выходе квадрато- ч 13 имеем ХЈ, на входе управлени i преобразователя прямого кода в допол- Ительнь й 14 лог, I слсдовате: .но, ita выходе указанного преобрачова 1 ля ;чесм отрицательное значение - х|, на ходе управления второго мультиплек- ссра 10,2 - код 01, следовательно, открыт первый канал данного мультиплексора и выход регистра 3.13 соединен с входом суммлтора-вычитателя 12, на выходе которого имеем значение Х +Y , которое записьшается в регистр 3.13, а значение 2() записывается в регистр 3.4.
8-й такт. На информационный вход 1 устройства подается значение Y, на i , оде управление первого мультиплексора 10.1 находится код 10, следовательно, открыт его второй канал и выход регистра 3.2 соединен с первым входом вычитателя 11, на выходе которого имеем , на выходе квадратора 13 имеем Y, на выходе преобразователя прямого кода в дополнительный 14 отрицательное значение - Y|, на входе управления второго мультиплексора 10.2 находится код 10, следовательно, открытый его второй канал, и на выходе сумматора-вычитателя 12 имеем значение X +Y +Z -d -Xj-Yf, которое записывается в регистр 3.14, а значение 2(,) записывается в регистр 3.8.
9-й такт. На информационный вход 8 устройства подается значение Y, на
входе управления первого мультиплексора 1001 находится код 10, следовательно, открыт его второй канал и на выходе вычитателя 11 имеем .-Yt , на выходе квадратора 13 имеем Y2, на выходе преобразователя прямого кода в
0
5
0
5
0
5
0
имеем отрицательное
дополнительный 14
значение - ч г, на входе управления второго мультиплексора 10.2 находится код 00, следовательно, открыт его третий канал и на выходе сумматора-вычитателя 12 имеем значение ,-d,- , которое записывается в регистр 3.15, а значение 2() записьшается в регистр 3.9о
10-й такт. На информационный вход 8 устройства подается значение Y-, на входе управления первого мультиплексора 10.1 находится код 10, следовательно, открыт его второй канал и на выходе вычитателя 11 имеем , на выходе квадратора 13 имеем Y|, на выходе преобразователя прямого кода в дополнительный 14 имеем отрицатель2.
ное значение Y, на входе управления второго мультиплексора 10.2 находится код 01, следовательно, открыт его первый канал и на выходе сумматора-вычитателя 12 имеем значение X,+Y,4
.
+ Z(- d,-X2-Y2, которое записывается в регистр 3.13, а значение 2(() записывается в регистр 3.7.
11-й такт. На информационный вход 8 устройства подается значение Zj, на входе управления первого мультиплексора 10.1 находится код 00, следовательно, открыт его третий канал и на выходе вычитателя 11 имеем ,,
3
5
O
5
на выходе квадратора 13 имеем Z на выходе преобразователя прямого кода в дополнительный 14 имеем отрица- „
тельное значение - Zj, на входе управления второго мультиплексора 10.2 находится код 10, следовательно, открыт его второй канал и на выходе сумматора-вычитателя 12 имеем значение X +Y +Z -d -X3 Y|-z|, которое записывается в регистр 3.14, а значение 2(,) записьшается в регистр 3.11. 12-й такт. На информационный вход 8 устройства подается значение Z, на входе управления первого мультиплексора 10.1 находится код 00, следовательно открыт его третий канал и на выходе вычитателя 11 имеем Z, на выходе квадратора 13 имеем на выходе преобразователя прямого кода в допол
нительный 14 имеем отрицательное значение - на входе управления второго мультиплексора 10.2 находится код 00, следовательно, открыт его третий канал и на выходе сумматора 12 имеем значение , которое записывается в регистр 3.15, а значение 2() записывается в регистр 3.12.
13-й такт. На информационный вход 8 устройства подается значение Z,,, на входе управления первого мультиплексора 10.1 находится код 00, следовательно, открыт его третий канал и на выходе вычитателя 11 имеем Z2-Zf, на выходе квадратора 13 имеем Z§ , на выходе преобразователя прямого кода в дополнительный 14 имеем отрицательное значение - L , на входе управле
ния второго мультиплексора 10.2 находится код 01, следовательно, открыт его первый канал и на выходе суммато- ра-вычитателя 12 имеем значение xf+Y +Z -d -xf-Yf-zf, которое записывается в регистр 3.13, а значение 2(Z2-Z1) записывается в регистр 3.10.
14-й такт. На информационный вход 8 устройства подается значение d 3, на входе управления первого мультиплексора 10.1 находится код 00, на выходе квадратора 13 имеем dj, на входе управления преобразователя прямого кода в дополнительный 14 находится лог, О, следовательно, на выходе
указанного преобразователя положительное значение d, на входе управления второго мультиплексора 10.2 находится код 10, следовательно, открыт его 40 второй канал и на выходе сумматора-вы- читателя 12 имеем значение xf+Y. 7 2. У
, -dj-X -Yg-Zg+dg, которое записывается в регистр 3.14.
15-й такт. На информационный выход 45 8 устройства подается значение d., на входе первого управления мультиплексора 10.1 находится код 00, на выходе
0
5
0
5
0
квадратора 13 имеем d, на входе управления преобразователя прямого кода в дополнительный 14 находится значение О, следовательно, на выходе указанного преобразователя находится положительное значение d, на входе управления второго мультиплексора 10.2 находится код 00, следовательно, открыт его третий канал и на выходе суммато- ра-вычитателя 12 имеем значение Х,+
+ Y/H-Z -df-X -Y -Z +dj , которое запи- 1 1 t 4 ц ч
сывается в регистр 3.15.
16-й такт. На информационный ход 8 устройства подается значение d, на входе управления первого мультиплексора 10.1 находится код 00, на выходе квадратора 13 имеем dЈ, на входе управления преобразователя прямого кода в дополнительный 14 лог, О, следовательно, на выходе указанного преобразователя положительное значение d на входе управления второго мультиплексора 10.2 находится код 01, следовательно, открыт его первый канал и на выходе сумматора-вычитателя 12 имеем значение X +Y +Z -d -x|-Y|-z|+clf, KOJ торое записывается-в регистр 3.13, при этом останавливается тактовый генератор блока 15 управления.
Таким образом, за 16 тактов работы в регистры 3.4,...3,12 записаны значения матрицы постоянных коэффициентов С, сдвинутые аппаратно на един разряд влево, в регистры 3.13,...,3,15 записаны значения вектора D.
Рассмотрим работу устройства на конкретном примере.
На вход 8 устройства подали следующие значения;
Тогда содержимое регистров следую- шее:
2,(XfX() 2. (4-9) -10 2.(Х3-Х,) 2.(7-9) -4 2.(Х4-Х,) - 2.(11-9) 4 2(Yi-Y,) 2.(6-4) 4 2 (Y,-Y, ) 2.(4-4) О 2 (Y4-Y,) 2.(10-4) 12 2 (Zt-Z,) 2.(9-4) 10 2 (Z3-Z,) 2.(5-4) 2 2 (Z4-Z«) 2,(5-4) 2„ 9Ч4гч4г-7г-4г-б г-92-+ 9
12
111635178
На вход 20 невязки дали значение заданной невязки 6 д0п 0.5
Поскольку схемы 19.1, 19.2, 19.3 сравнения сравнивают по модулю значение кода с выхода сумматоров 17.4, 17.8, 17.12 со значением заданной невязки Јдоп на входе 20, то если код на выходе сумматоров 17.4, 17.8, 17.12 по абсолютной величине больше Јion , значит на выходе схем сравнения 19.1, 19.2, 19.3 находится сигнал разрешающий, а если то запрещающий счет реверсивным счетчикам 18.1, 18.2, 18.3, который в зависимости от значения знаковых разрядов сумматоров 17.4, 17.8, 17.12 работает с различными направлениями счета. При значении знакового разряда на выходе сумматоров 17.4, 17.8, 17.12, равным донице, счетчики 18.1. 18.2, 18.3 .коммутируются в режим суммирования, j а противном случае при значении знакового разряда, равного нулю, счетчики коммутируются в режим вычитания. При этом на их выходах будут накапливаться значения координат. Итерацион ые процессы в координатных блоках будут происходить до тех пор, пока на выходах реверсивных счетчиков
50
та, которые блокируют реверсивные счетчики 18.1, 18.2, 18.3, а это свидетельствует 9 том, что устройство завершило счет и значения X 3, Y 2, Z 1 являются искомыми координатами.
При поступлении на информационный вход устройства 8 следующих значений Xj, Y|, Z,, d устройство вычисляет
12
5
j
35
40 30
50
5
координаты X, Y, Z с учетом предыдущих.
Формула изобретения
Устройство для вычисления координат, содержащее три регистра, координат, два мультиплексора, схему сравнения, восемнадцать умножителей, шесть сумматоров, вычитатель и блок управления, причем выходы первого и второго умножителей соединены с входами соответственно, первого и второго слагаемых первого сумматора, выход тре-- тьего умножителя соединен с входом первого слагаемого второго сумматора, выходы четвертого и пятого умножителей соединены с входами соответственно, первого и второго слагаемых третьего сумматора, выход шестого умножителя соединен с входом первого слагаемого четвертого сумматора, выходы седьмого и восьмого умножителей соединены с входами соответственно первого и второго слагаемых пятого сумматора, выход девятого умножителя соединен с входом первого слагаемого шестого сумматора, выход первого регистра координат соединен с первым информационным входом первого мультиплексора, управляющий вход которого соединен с первым тактовым выходом блока управления, второй и третий тактовые выходы которого соединены с синхронизирующими входами первого и второго регистров координат, отличающееся тем, что, с целью упрощения конструкции, в него введены девять сумматоров, один сумматор-вычитатель, Две схемы сравнения, три счетчика, квадратор, двенадцать регистров координат, преобразователь прямого кода и дополнительный и генератор импульсов, причем информационный вход устройства1 соединен с информационными входами регистров координат с первого по третий, с входом аргумента квадратора и с входом вычитаемого вычитателя, выходы второго и третьего регистров координат соединены соответственно с вторым и третьим информационными входами
первого мультиплексора, выход которого соединен с входом уменьшаемого вычитателя, выход которого соединен с информационньми входами регистров с
13163
четвертого по двенадцатый, выход квадратора соединен с. информационным входом преобразователя прямого кода с дополнительным, выход которого соединен с входом первого операнда суммато- ра вычитателя, вход второго операнда которого соединен с выходом второго мультиплексора, информационные входы которого с первого по третий соединены с выходами соответственно регистров координат с тринадцатого по пятнадцатый, информационные входы которых соединены с выходом сумматора-вы- читателя, выход четвертого регистра координат соединен с входами первых сомножитечей первого и четвертого умно-кителеи, выход пятого регистра соединен с входами первых- сомножителей
,
пятого и седьмого умножителей, выходы
десятого и одиннадцатого умножителей соединены с входами соответственно первого и второго слагаемых седьмого сумматора, выход двенадцатого умножителя соединен с входом первого слага- емого восьмого сумматора, выходы тринадцатого и четырнадцатого умножителе соединены с входами соответственно первого и второго слагаемых девятого сумматора, выход пятнадцатого умножи- теля соединен с входом первого слагаемого десятого сумматора, выходы шестнадцатого и семнадцатого умножителей соединены с входами соответственно первого и второго слагаемых одиннадцатого сумматора, выход восемнадцатого умножителя соединен с входом пер- гого слагаемого двенадцатого сумматора, выходы первого, третьего, пятого, седьмого, девятого и одиннадца- того сумматоров соединены с входами лторых слагаемых соответственно второго, четвертого, шестого, восьмого, десятого и двенадцатого сумматоров, выход:i второго, шестого и десятого сумматоров соединены с входами первых слагаемы::: соответственно, тринадцатого, четырна/щатого и пятнадцатого сумматоров, выходы знаковых р 1зрядов четвертого, восьмого и двенадт, сумматоров соединены с входами направления счета соответственно первого, второго и третьего счетчиков, входы запрета которых соединены с выходами признаков Меньше либо равно соответственно первой, второй и третьей схем сравнения, входы первых . г;ер 1 мпр которых соединены с выходами ьксюрчядаонныч разрядов соответст
51
,
5
10
0
35
25 эд ,Q дс 50
55
/8U
венно четвертого, восьмого и двенадцатого сумматоров, входы вторых операндов первой, второй и третьей схем сравнения соединены с входом погрешности устройства, выход шестого регистра координат соединен с входами первых сомножителей шестого и тринадцатого умножителей, выход седьмого регистра координат соединен с входами первых сомножителей второго и десятого умножителей, выход восьмого регистра координат соединен с входами первых сомножителей восьмого и одиннадцатого умножителей, выход девятого регистра координат соединен с входами первых сомножителей двенадцатого и четырнадцатого умножителей, выход десятого регистра координат соединен с входами первых сомножителей третьего и шестнадцатого умножителей, выход одиннадцатого регистра координат соединен с входами первых сомножителей девятого и семнадцатого умножителей, выход двенадцатого регистра координат соединен с входами первых сомно«ите лей пятнадцатого и восемнадцатого умножителей, выходы регистров координат с тринадцатого по пятнадцатый соединены с нходами вторых слагаемых соответственно тринадцатого, четырнадцатого и пятнадцатого сумматоров, выход тринадцатого сумматора соединен с входами вторых сомножителей четвертого, десятого и шестнадцатого умножителей, выход четырнадцатого сумматора соединен с входами вторых сомножителей пятого, одиннадцатого и семнадцатого умножителей, выход пятнадцатого сумматора соединен с входами вторых сомножителей шестого, двенадцатого и восемнадцатого умножителей, выход генератора импульсов соединен со счетными входами счетчиков с первого по третий, выход первого счетчика соединен с входами вторых сомножителей первого, седьмого и тринадцатого умножителей и первым выходом устройства, выход второго счетчика соединен с входами вторых сомножителей второго восьмого и четырнадцатого умножителей и с вторым выходом устройства, выход третьего счетчика соединен с входами вторых сомножителей третьего, девятого и пятнадцатого умножителей и с третьим выходом устройства, тактовые выходы блока управления с пятого по семнадцатый соединены с синхронизиру ющими входами регистров координат
с третьего по пятнадцатый соответст-, венно, шестнадцатый и семнадцатый тактовые выходы блока управления соединены соответственно, с управляющими 8x0-5
Фиг.г
дами второго мультиплексора и преобразователя прямого кода в дополнительный.
- (/;
Фиг. 5
Ъ
1114:
п
+(1)
(и
го
J
Фиг А
| Цифровой преобразователь координат | 1974 |
|
SU614439A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Преобразователь координат | 1988 |
|
SU1513445A1 |
| Насос | 1917 |
|
SU13A1 |
