шины К 13 расположены по дуге окружности с центром, совпадающим с осью Ш 11. С рычагом 8,9 соединены оси 15,16 роликов (Р) 17, 18, причем оси Р 17,18 расположены по радиусам дуги окружности качения Р 17, 18 и по поперечной балке 5 с центром, совпадающим с осью Ш 11. Шарнирное соединение ГЦ 19 управления с выдвижной частью 6 и роликом 9 позволяет обеспечить равноценные и не изменяющиеся случайным об- разом параметры скалывания К 13 подкровельной пачки угля. 2 ил.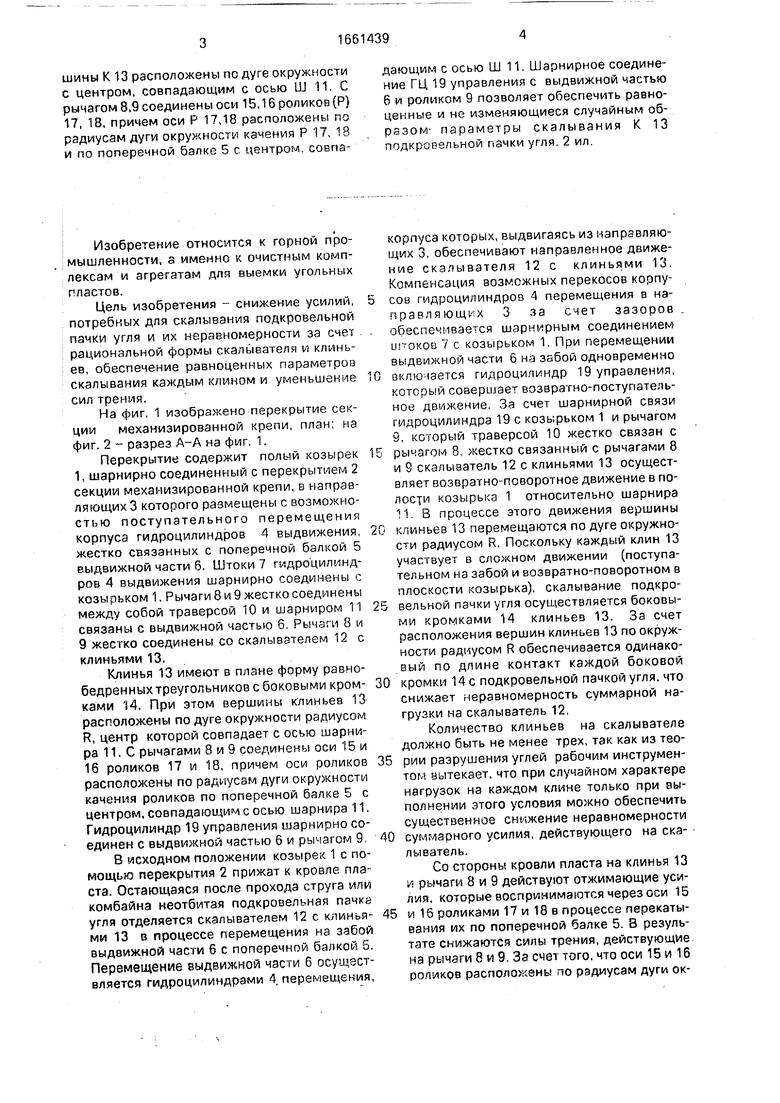

| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕКРЫТИЕ СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1992 |
|
RU2015339C1 |
| Перекрытие секции механизированной крепи | 1988 |
|
SU1613634A1 |
| Секция механизированной крепи | 1982 |
|
SU1102976A1 |
| Перекрытие секции механизированной крепи | 1989 |
|
SU1705587A1 |
| СКАЛЫВАЮЩИЙ КОЗЫРЕК СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2010 |
|
RU2451183C1 |
| Секция механизированной крепи | 1985 |
|
SU1301984A1 |
| Перекрытие секции механизированной крепи | 1987 |
|
SU1469171A1 |
| Перекрытие секции механизированной крепи | 1988 |
|
SU1645543A1 |
| Перекрытие секции механизированной крепи | 1988 |
|
SU1574824A2 |
| Гидросистема управления секциями крепи | 1986 |
|
SU1472691A1 |
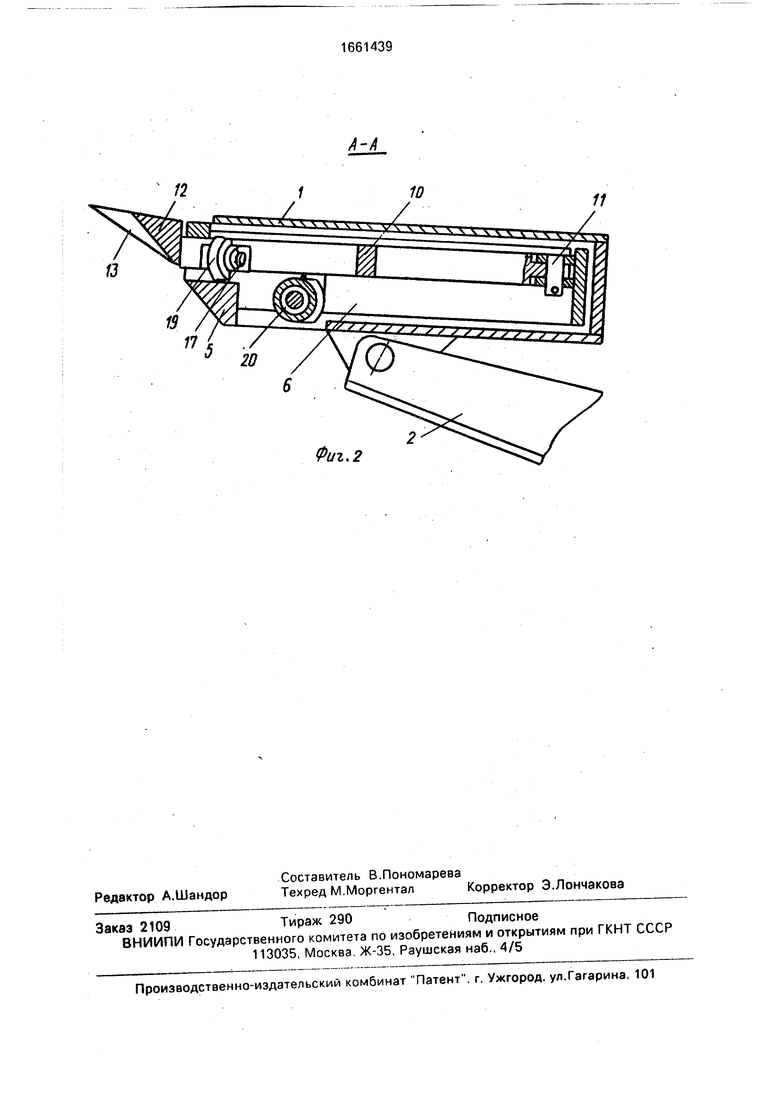
Изобретение относится к горной промышленности, а именно к очистным комплексам и агрегатам для выемки угольных пластов. Цель - повышение надежности за счет снижения усилий, необходимых для скалывания подкровельной пачки и их неравномерности. Перекрытие содержит козырек 1, в направляющих которого размещены корпуса гидроцилиндров (ГЦ) 4, жестко связанных с поперечной балкой 5 выдвижной части 6. Штоки 7 ГЦ 4 шарнирно соединены с козырьком 1. С выдвижной частью 6 шарниром (Ш) 11 связаны рычаги 8, 9, жестко соединенные между собой траверсой 10. Рычаги 8, 9 жестко соединены со скалывателем 12 с клиньями (К) 13. Последние имеют в плане форму равнобедренных треугольников с боковыми кромками 14. Вершины К 13 расположены по дуге окружности с центром, совпадающим с осью Ш 11. С рычагами 8, 9 соединены оси 15, 16 роликов (Р) 17, 18, причем оси Р 17, 18 расположены по радиусам дуги окружности качения Р 17, 18 и по поперечной балке 5 с центром, совпадающим с осью Ш 11. Шарнирное соединение ГЦ 19 управления с выдвижной частью 6 и роликом 9 позволяет обеспечить равноценные и не изменяющиеся случайным образом параметры скалывания К 13 подкровельной пачки угля. 2 ил.
Изобретение относится к горной промышленности, а именно к очистным комплексам и агрегатам для выемки угольных пластов.
Цель изобретения - снижение усилий, потребных для скалывания подкровельной пачки угля и их неравномерности за счет рациональной формы скалывателя и клиньев, обеспечение равноценных параметров скалывания каждым клином и уменьшение сил трения.
На фиг, 1 изображено перекрытие секции механизированной крепи, план; на фиг. 2 - разрез А-А на фиг. 1.
Перекрытие содержит полый козырек 1, шарнирно соединенный с перекрытием 2 секции механизированной крепи, в направляющих 3 которого размещены с возможностью поступательного перемещения корпуса гидроцилиндров 4 выдвижения, жестко связанных с поперечной балкой 5 выдвижной части 6. Штоки 7 п/.дроцилиндров 4 выдвижения шарнирно соединены с козырьком 1, Рычаги 8 и 9 жестко соединены между собой траверсой 10 и шарниром 11 связаны с выдвижной частью 6. Рычаги 8 и 9 жестко соединены со скалывателем 12 с клиньями 13,
Клинья 13 имеют в плане форму равнобедренных треугольников с боковыми кромками 14. При этом вершины клиньев 13 расположены по дуге окружности радиусом R, центр которой совпадает с осью шарнира 11. С рычагами 8 и 9 соединены оси 15 и 16 роликов 17 и 18, причем оси роликов расположены по радиусам дуги окружности качения роликов по поперечной балке 5 с центром, совпадающим с осью шарнира 11. Гидроцилиндр 19 управления шарнирно соединен с выдвижной частью 6 и рычагом 9
В исходном положении козырек 1 с помощью перекрытия 2 прижат к кровле пласта. Остающаяся после прохода струга или комбайна неотбитая подкровельная пачка угля отделяется скалывателем 12 с. клиньями 13 в процессе перемещения на забой выдвижной части 6 с поперечной балкой 5. Перемещение выдвижной части 6 осуществляется гидроцилиндрами 4. перемещения,
корпуса которых, выдвигаясь из направляющих 3, обеспечивают направленное движение скалывателя 12 с клиньями 13. Компенсация возможных перекосов корпусов гидроцилиндров 4 перемещения в на- правляюшд-х 3 за счет зазоров обеспечивается шарнирным соединением иг оков 7 с козырьком 1 При перемещении выдвижной части б на забой одновременно
вклю 1эется гидроцилиндр 19 управления, который совершает возвратно-поступательное движение. За счет шарнирной связи гидроцилиндра 19 с козырьком 1 и рычагом 9, который траверсой 10 жестко связан с
рычагом 8, жестко связанный с рычагами 8 и 9 скалыватель 12 с клиньями 13 осуществляет возвратно-поворотное движение в полости козырька 1 относительно шарнира 11 В процессе этого движения вершины
клиньев 13 перемещаются по дуге окружности радиусом R. Поскольку каждый клин 13 участвует в сложном движении (поступательном на забой и возвратно-поворотном в плоскости козырька), скалывание подкровельной пачки угля осуществляется боковыми кромками 14 клиньев 13. За счет расположения вершин клиньев 13 по окружности радиусом R обеспечивается одинаковый по длине контакт каждой боковой
кромки 14с подкровельной пачкой угля, что снижает неравномерность суммарной нагрузки на скалыватель 12.
Количество клиньев на скалывателе должно быть не менее трех, так как из теории разрушения углей рабочим инструментом вытекает, что при случайном характере нагрузок на каждом клине только при выполнении этого условия можно обеспечить существенное снижение неравномерности
суммарного усилия, действующего на скалыватель.
Со стороны кровли пласта на клинья 13 л рычаги 8 и 9 действуют отжимающие усилия, которые воспринимаются через оси 15
и 16 роликами 17 и 18 в процессе перекатывания их по поперечной балке 5. 8 результате снижаются силы трения, действующие на рычаги 8 и 9. За счет того, что оси 15 и 16 роликов расположены по радиусам дуги окружности качения роликов, а их поперечный профиль образован дугой окружности радиусом г, устраняется проскальзывание роликов в процесс возвратно-поворотного движения рычагов и подштыбовка дорожки качения роликов по поперечной балке, что также способствует снижению сил трения.
Шарнирное сединение гидроцилиндра 19 управления с выдвижной частью 6 и рычагом 9 позволяет обеспечить примерно равноценные и не изменяющиеся случайным образом параметры скалывания клиньями подкровельной пачки угля. При этом одинаковые скорости движения поршня гидроцилиндра 19 в ту и другую сторону могут быть обеспечены, например, при включении гидроцилиндра управления по дифференциальной схеме при условии, что d 0,7D, где d и D - диаметры штока и поршня.
Таким образом, жесткое соединение рычагов между собой и шарнирное соединение их и выдвижной части с гидроцилиндром управления обеспечивает примерно равноценные условия скалывания подкро- вельной пачки угля каждым из клиньев ска- лывателя. За счет того, что клинья имеют в плане форму равнобедренных треугольников, а их боковые кромки наклонены к продольной оси симметрии клина под острым углом, обеспечиваются рациональные параметры скалывания подкровельной пачки угля в процессе сложного движения клиньев: поступательного на забой и возвратно-поворотного в плоскости козырька.
Применение не менее трех клиньев, одновременно участвующих в скалывании подкровельной пачки угля, обеспечивает снижение неравномерности суммарного усилия, действующего на скалыватель. Снижению неравномерности суммарного усилия скалывания способствует и расположение вершин клиньев по дуге окружности с центром, расположенным на оси шарнира
поворота рычагов. За счет того, что рычаги снабжены роликами, причем оси роликов расположены по радиусам дуги качения роликов по поперечной балке, а поперечный профиль роликов образован дугой окружности, уменьшаются силы трения, действующие на рычаги, и затраты энергии на скалывание подкровельной пачки угля. Все это в совокупности обеспечивает повышение эффективности работы перекрытия сек- ции механизированной крепи при скалывании подкровельной пачки на пластах, сложенных крепкими и вязкими углями.
Формула изобретения Перекрытие секции механизированной крепи, включающее козырек, выдвижную часть, связанную с козырьком гидроцилиндрами выдвижения и шарнирно соединенную с рычагами и укрепленными на них скалывателями с клиньями с возможностью возвратно-поворотного движения рычагов в плоскости козырька с опорой на поперечную балку, соединенный с рычагами гидроцилиндр управления, отличающееся тем, что, с целью повышения надежности за счет снижения усилий, необходимых для скалывания подкровельной пачки, и их не-в равномерности, рычаги жестко соединены между собой и снабжены роликами, оси которых связаны с рычагами, расположены по радиусам дуги окружности поворота рычагов и установлены Qвозможностью качения роликов по поперечной балке, профиль поперечного сечения роликов выполнен по дуге окружности, при этом клинья скалыва- телей в плане выполнены в виде равнобедренных треугольников, их боковые кромки наклонены под острым углом к продольной оси симметрии клина, вершины расположены по дуге окружности с центром, совпадающим с осью шарнира поворота рычагов, а гидроцилиндр управления соединен с выдвижной частью.
х П
13
Фиг. 2
11
| Перекрытие секции механизированной крепи | 1986 |
|
SU1446334A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
