Изобретение относится к машиностроению и может быть использовано в приводах машин для преобразования знакопеременного вращающего момента в знакопостоянный с реверсированием вращения ведомого вала,
Цель изобретения - упрощение конструкции механизма и изготовления.
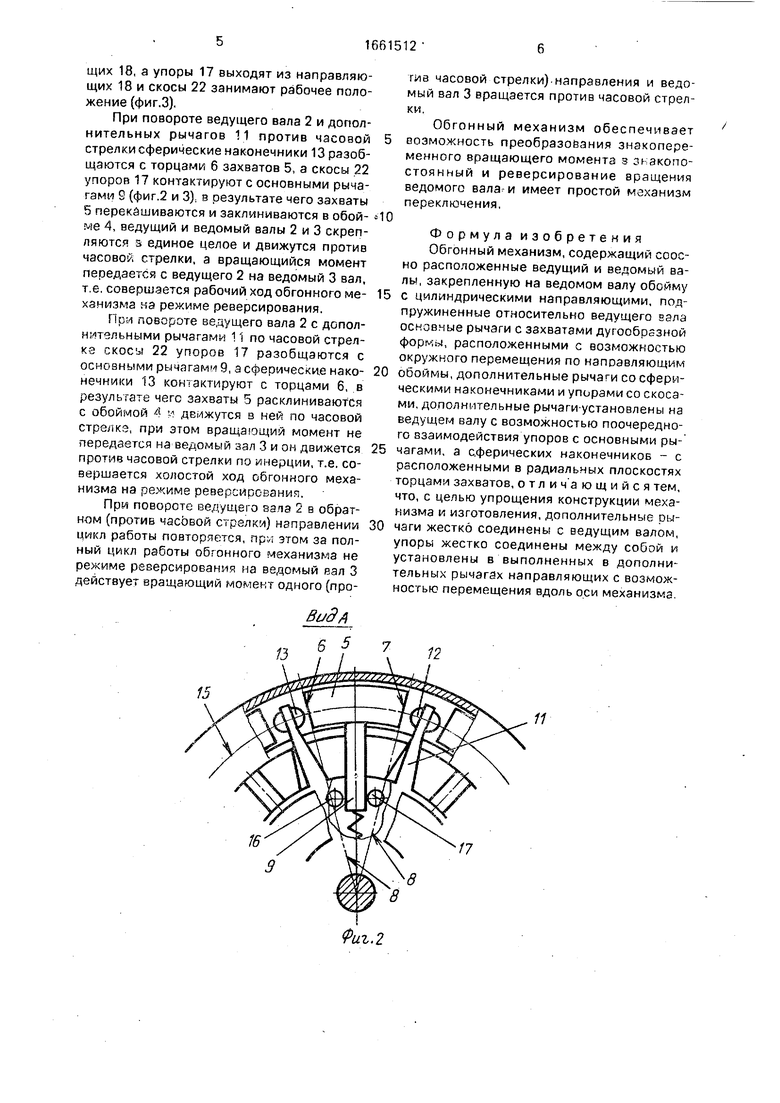
На фиг.1 изображен обгонный механизм, продольный вертикальный разрез; на фиг.2 -- вид А на фиг. 1; на фиг.З - разрез Б-Б На фиг.1; на фиг.4 - схема сил при взаимодействии скоса с основным рычагом.
Обгонный механизм содержит установ- пенные в опорах в корпусе 1 ведущий 2 и ведомый 3 валы. Обойма 4 закреплена на ведомом валу 3 и в ее цилиндрических направляющих установлены с возможностью Кругового перемещения дугообразные захваты 5, торцы 6 w 7 которых расположены fe радиальных плоскостях 8, проходящих через общую ось ведущего 2 и ведомого 3 С-алов.
Основные рычаги 9 соединены с захвз- щ.ми Б, а упругие элементы 10 связаны своими концами с ведущим валом 2 и Основными рычагами 9.
Дополнительные рычаги 11 скреплены с бедущим валом 2 и имеют сферические (шнечники 12 и 13, которые размещены про- Гив торцов б и 7. Центры сфер наконечников 12 и 13 находятся в срединной плоскости 14 Захватов 5 и расположены на окружности 15, соединяющей центры масс захватов 5.
Упоры 16м 17 установлены параллельно Общей оси ведущего 2 и ведомого 3 валов с Возможностью осевого перемещения, например, в направляющих 18, скрепленных с Дополнительными рычагами 11. Упоры 16 и 17 соединены друг с другом фланцами 19 v- пальцами 20 и имеют скосы 21 и 22, которые параллельны друг другу и размещены по Обе стороны от основных рычагов 9. Флан- дь 19 связаны с системой управления (не показана).
Обгонный механизм работает следующим образом.
Для обеспечения вращения ведомого вала 3, например, по часовой стрелке по команде от системы управления фланцы 19 перемещаются вправо (фиг.1), в результате чего упоры 16 выходят из направляющих 18 и скосы 21 занимают рабочее положение, а упоры 17 утапливаются в направляющие 18 (фиг. 3 и 4).
При повороте ведущего вала 2 и дополнительных рычагов 11 по часовой стрелке Сферические наконечники 12 разобщаются С торцами 7 захватов 5, а упоры 16 своими Скосами 21 контактируют с основными рычагами 9 (фиг.2-4). Зазоры в системе вы бра- ны так, что при этом сферические наконечники 13 также разобщены с торцами б (что всегда может быть обеспечено, так как торцы 6 и 7 и упоры 16 и 17 находятся на разных расстояниях от общей оси ведущего 2 и ве-. домого 3 валов).
Скосы 21 расположены так, что усилия Pi и 2, действующие от них на основные
0 рычаги 9 и захваты 5, направлены параллельно и перпендикулярно срединной плоскости 14 (фиг.4), поэтому под действием усилий PI и 2 захваты 5 перекашиваются в обойме 4 в параллельном и перпендикуляр5 ном плоскости 14 направлениях, в результате чего резко возрастают нормальные усилия и соответствующие им касательные силы трения в местах контакта захватов 5 с обоймой 4. Когда момент от указанных сил
0 трения станет равным по величине моменту внешнего сопротивления на ведомом валу 3, захваты 5 заклиниваются в обойме 4, в результате чего ведущий и ведомый валы 2 и 3 скрепляются в единое целое и совместно
5 движутся по часовой стрелке, а вращающий момент передается с ведущего 2 на ведомый 3 вал, т.е. совершается рабочий ход обгонного механизма.
При повороте ведущего вала 2 и допол0 нительных ры.чагов 11 против часовой стрелки скосы 21 упоров 16 разобщаются с основными рычагами 9, а сферические наконечники 12 контактируют с торцами 7 (фиг.2 и 3). Усилие, действующее на торец 7 от
5 сферического наконечника 12, направлено по касательной к окружности 15, являющейся траекторией движения центра масс захвата 5, поэтому захваты 5 расклиниваются с обоймой 4 и движутся в ней против часо0 вой стрелки, а упругие элементы 10 обеспечивают выборку зазоров. При этом вращающий момент не передается на ведомый вал 3 и он движется по часовой стрелке по инерции, т.е.-совершается холостой ход
5 обгонного механизма.
При повороте ведущего вала 2 в обратном (по часовой стрелке) направлении сферические наконечники 12 разобщаются с торцами 7, скосы 21 контактируют с основ0 ными рычагами 9, захваты 5 перекашиваются и заклиниваются в обойме 4 и цикл повторяется, при этом за полный цикл работы обгонного механизма ка ведомый вал 3 действует вращающий момент одного (по
5 часовой стрелке) направления и ведомый вал 3 вращается -по часовой стрелке.
Для реверсирования вращения ведомого вала 3 по команде от системы управления фланцы 19 перемещаются влево (фиг.1), при этом упоры 16 утапливаются в направляющих 18, а упоры 17 выходят из направляющих 18 и скосы 22 занимают рабочее положение (фиг.З),
При повороте ведущего вала 2 и дополнительных рычагов 11 против часовой стрелки сферические наконечники разобщаются с торцами 6 захватов 5, а скосы 22 упоров 17 контактируют с основными рычагами 9 (фиг.2 и 3). в результате чего захваты 5 перекашиваются и заклиниваются в обой- ме 4, ведущий и ведомый валы 2 и 3 скрепляются з единое целое и движутся против часовой стрелки, а вращающийся момент передается с ведущего 2 на ведомый 3 вал, т.е. совершается рабочий ход обгонного ме- хзиизма на режиме реверсирования.
При повороте ведущего вала 2 с дополнительными рычагами 1 i по часовой стрелка СКОСУ 22 упоров 17 разобщаются с основными рычагами 9, а сферические нако- нечники 13 контактируют с торцами 6, в результате чего захваты 5 расклиниваются с обоймой & -я движутся в ней по часовой стрелкэ, при этом вращающий момент не передается на ведомый зал 3 и он движется против часовой стрелки по инерции, т.е. совершается холостой ход обгонного механизма на режиме реверсирования.
При повороте ведущего вала 2 в обратном (против часовой стрелкя) направлении цикл работы повторяется, при этом за полный цикл работы обгонного механизма не режиме реверсирования на ведомый вал 3 действует вращающий момент одного (проВидд
гиз часовой стрелки).направления и ведомый вал 3 вращается против часовой стрелки.
Обгонный механизм обеспечивает возможность преобразования знакопеременного вращающего момента з з акопо- стоянный и реверсирование вращения ведомого вала-и имеет простой механизм переключения,
Формула изобретения Обгонный механизм, содержащий соос- но расположенные ведущий и ведомый валы, закрепленную на ведомом валу обойму с цилиндрическими направляющими, подпружиненные относительно ведущего еала основные рычаги с захватами дугообразной формы, расположенными с возможностью окружного перемещения по направляющим обоймы, дополнительные рычаги со сферическими наконечниками и упорами со скосами, дополнительные рычаги-установлены на ведущем валу с возможностью поочередного взаимодействия упоров с основными рычагами, а сферических наконечников - с расположенными в радиальных плоскостях торцами захватов, отличающийся тем, что, с целью упрощения конструкции механизма и изготовления, дополнительные рычаги жестко соединены с ведущим валом, упоры жестко соединены между собой и установлены в выполненных в дополнительных рычагах направляющих с возможностью перемещения вдоль оси механизма.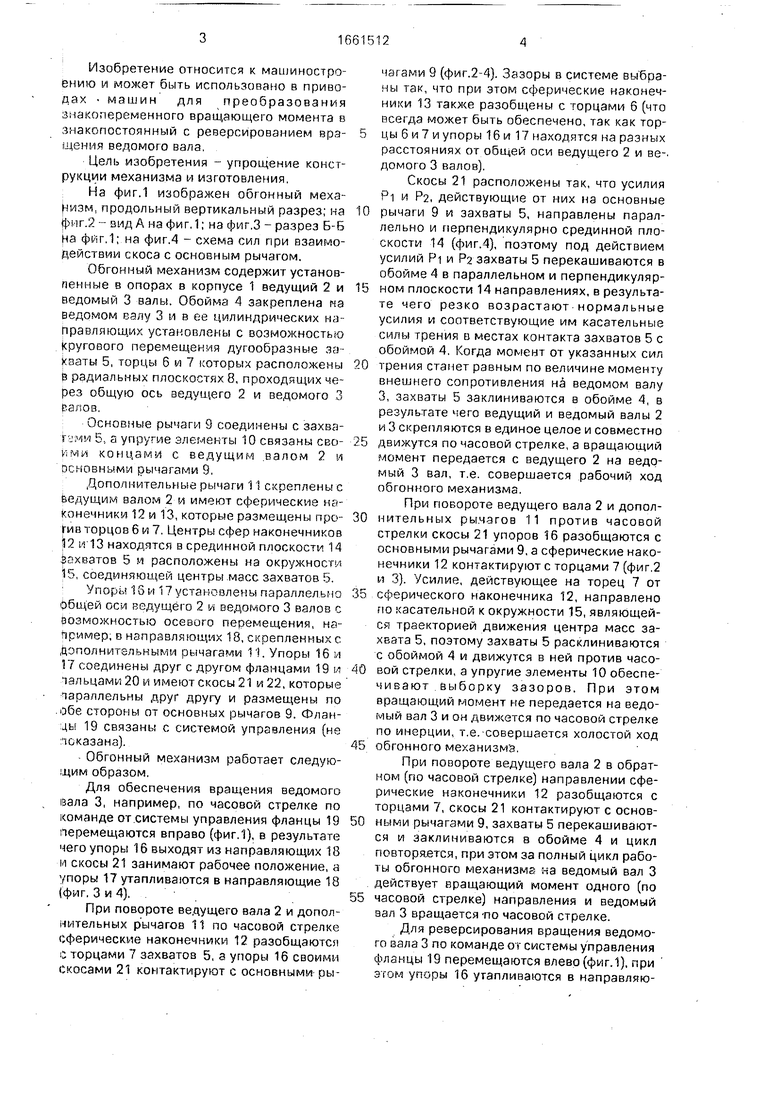
| название | год | авторы | номер документа |
|---|---|---|---|
| Обгонный механизм | 1988 |
|
SU1638396A1 |
| Обгонный механизм | 1985 |
|
SU1303765A1 |
| Обгонный механизм | 1986 |
|
SU1411528A1 |
| Обгонный механизм | 1988 |
|
SU1581919A1 |
| Кривошипно-коромысловый механизм | 1990 |
|
SU1809208A1 |
| ВЕЛОСИПЕД (ВАРИАНТЫ) | 2009 |
|
RU2404901C2 |
| Вариатор Н.П.Ефимова | 1981 |
|
SU1199674A1 |
| Механизм сцепления | 1980 |
|
SU985507A1 |
| АВТОМОБИЛЬНЫЙ ВАРИАТОР | 1997 |
|
RU2127382C1 |
| МУФТА СВОБОДНОГО ХОДА | 1996 |
|
RU2110707C1 |
Изобретение относится к машиностроению и может быть использовано для преобразования знакопеременного вращающего момента в знакопостоянный и реверсирования вращения ведомого вала. Цель изобретения - упрощение конструкции и изготовления. Обгонный механизм содержит ведущий 2 и ведомый 3 валы (В). На В 3 закреплена обойма 4, в которой с возможностью кругового перемещения установлены дугообразные захваты 5. Основные рычаги (ОР) 9 соединены с захватами 5 и подпружинены относительно В 2. Дополнительные рычаги (ДР) 11 скреплены с В 2 и имеют сферические наконечники для взаимодействия с торцами захватов. Упоры 16 и 17 установлены в направляющих ДР 11 с возможностью осевого перемещения, жестко соединены друг с другом и имеют скосы для взаимодействия с ОР 9. При знакопеременном вращении В 2 наконечники и скосы ДР 11 периодически взаимодействуют с торцами захватов и ОР 9, в результате чего захваты 5 периодически расклиниваются и заклиниваются с обоймой 4. На В 3 действует вращающий момент одного направления. Реверсирование вращения В 3 обеспечивается за счет осевого перемещения блока упоров 16, 17. 4 ил.
15
16
17
8
Риг.2
6-6
ft20
Риг, 4
19
| Обгонный механизм | 1988 |
|
SU1581919A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
