fO
Изобретение относится к машиностроению и может быть использовано в импульсных передачах.
Целью изобретения является повышение надежности путем исключения перекоса захвата при обгоне.
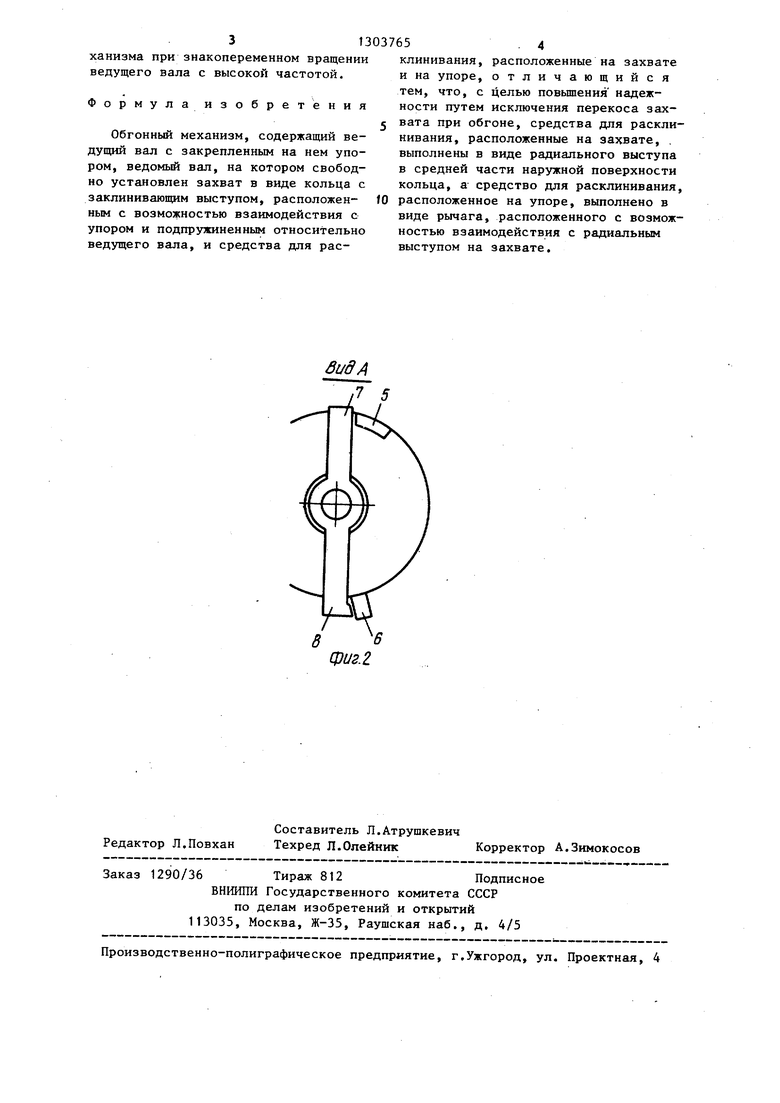
На фиг.1 показана кинематическая схема механизма, вид сбоку; на фиг.2- .вид А на фиг. 1.
Обгонный механизм содержит размещенные в корпусе 1 ведущий 2 и ведомый 3 валы, установленный на ведомом вале 3 с возможностью поворота захват 4 в виде кольца с заклинивающим осевым выступом 5 и со средством для расклинивания в виде радиального выступа 6. Выступ 5 расположен с возможностью взаимодействия с упором 7. На упоре 7 расположено средство для расклинивания в виде рычага 8. Упор 20 закреплен на ведущем вале 2. Радиальный выступ 6 и рычаг 8 контактируют в плоскости 9, равноудаленной от торцов кольца и перпендикулярной общей оси валов 2 и 3. Пруткина 10 закреплена концами с ведущим валом 2 и захватом 4..
Обгонньй механизм работает еле-. дующим образом.
13037652
с осевым выступом 5,
тактирует с радиальны результате разобщения тупом 5 ликвидируется та 4 на ведомом вале клинивается на ведомо действием усилия от р ся против часовой стр контактирует с радиал в плоскости 9, равноу цов захвата 4, поэтом усилий на захвате 4 н ния в местах контакта домьш валом 3 и пара 15 ленный против часовой щающий момент от них 3 также малы, в резу домый вал 3 разобщае валом 2 и движется по ке по инерции, т.е, о холостой ход механизм жина 10 поджимает зах валу 3 и обеспечивает Под действием пружины рекашивается на ведом ко усилие пружины 10 силы трения в местах вата 4 с ведомым вало ный вращающий момент
25
При повороте ведущего- вада 2, нап- 30 домом вале 3 также малы.
ример, по часовой стрелке упор 7 также поворачивается по часовой стрелке и контактирует с выступом 5, Под действием усилия от упора 7 захват 4 перекашивается на ведомом .вале 3, в результате чего в местах контакта зах- . вата 4 с ведомым валом 3 возникают силы трения, создающие на ведомом вале 3 вращающий момент, действующий по часовой стрелке. Когда момент от сил трения на ведомом вале 3 становится равным по величине моменту внешнего сопротивления, захват 4 заклинивается на ведомом вале 3, при этом ведущий и ведомый валы 2 и 3 движутся как единое целое и осуществляется рабочий ход механизма.
При увеличении момента на ведущем вале 2 повьшается усилие, с которым упор 7 действует на выступ 5, увеличиваются перекашивающие усилия на захвате 4, растут силы трения в местах контакта захвата 4 с ведомьм валом 3 и соответственно увеличивается вращающий момент от них на ведомом вале 3,
При повороте ведущего вала 2 против часовой стрелки упор 7 и рычаг 8 также поворачиваются против часовой стрелки. При этом упор 7 разобщается
а рычаг 8 конO
0
тактирует с радиальным выступом 6, В результате разобщения упора 7 с выступом 5 ликвидируется перекос захвата 4 на ведомом вале 3, захват 4 расклинивается на ведомом вале 3 и под действием усилия от рычага 8 вращается против часовой стрелки. Рычаг 8 контактирует с радиальным выступом 6 в плоскости 9, равноудаленной от торцов захвата 4, поэтому перекашивающих усилий на захвате 4 нет, а силы трения в местах контакта захвата 4 с ве- домьш валом 3 и паразитный (направ- 5 ленный против часовой стрелки) вращающий момент от них на ведомом вале 3 также малы, в результате чего ведомый вал 3 разобщается с ведущим валом 2 и движется по часовой стрелке по инерции, т.е, осуществляется холостой ход механизма. При этом пружина 10 поджимает захват 4 к ведомому валу 3 и обеспечивает выборку зазоров. Под действием пружины 10 захват 4 перекашивается на ведомом вале 3, однако усилие пружины 10 мало, поэтому силы трения в местах контакта захвата 4 с ведомым валом 3 и паразитный вращающий момент от них на ве5
При повороте ведущего вала 2 в обратном (по часовой стрелке) направлении рычаг 8 разобщается с радиальным выступом 6,- а упор 7 контактиру35 ет с заклинивающим выступом 5. Под действием усилия от упора 7 захват 4 перекашивается и заклинив ается на ведомом вале 3 и цикл работы механизма повторяется; при этом на ведомьи вал
40 3 действует вращающий момент только одного (например, по часовой стрелке) направления, под действием которого ведомый вал 3 совершает однонаправленное вращение,
45 Таким образом, упор 7 и рычаг 8, попеременно взаимодействуя со скрепленными с захватом выступами 5 и 6, осуществляют двухстороннюю (удерживающую) связь захвата с ведущим ва50 лом и принудительное расклинивание (заклинивание) захвата на ведомом вале; при этом угловые перемещения захвата относительно ведущего вала малы и определяются величиной техно55 логических зазоров, что исключает периодические соударения контактирующих элементов,
Предлагаемое устройство обеспечивает повьш1ение надежности работы механизма при знакопеременном вращении ведущего вала с высокой частотой.
Формула изобретения
Обгонный механизм, содержащий ведущий вал с закрепленным на нем упором, ведомьй вал, на котором свободно установлен захват в виде кольца с заклинивающим выступом, расположенным с возможностью взаимодействия с упором и подпружиненным относительно ведущего вала, и средства для рас
клинивания, расположенные на захвате и на упоре, отличающийся тем, что, с целью повышения надежности путем исключения перекоса захвата при обгоне, средства для расклинивания, расположенные на захвате, . выполнены в виде радиального выступа в средней части наружной поверхности кольца, а средство для расклинивания, расположенное на упоре, выполнено в виде рычага, расположенного с возможностью взаимодействия с радиальным выступом на захвате.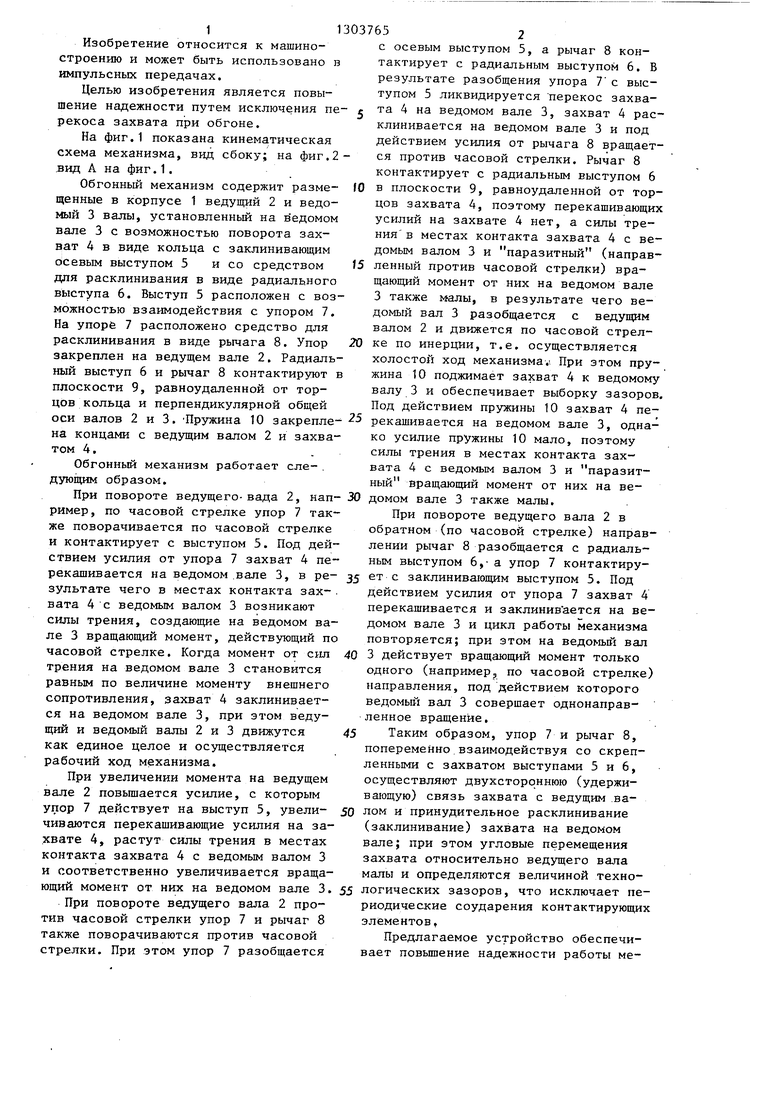
| название | год | авторы | номер документа |
|---|---|---|---|
| Обгонный механизм | 1988 |
|
SU1638396A1 |
| Обгонный механизм | 1986 |
|
SU1411528A1 |
| Обгонный механизм | 1988 |
|
SU1661512A1 |
| Кривошипно-коромысловый механизм | 1990 |
|
SU1809208A1 |
| Вариатор Н.П.Ефимова | 1981 |
|
SU1199674A1 |
| Муфта | 1984 |
|
SU1268845A1 |
| РЕВЕРСИВНЫЙ ОБГОННЫЙ МЕХАНИЗМ | 1982 |
|
SU1074182A1 |
| Коробка передач | 1983 |
|
SU1191656A1 |
| ЗУБЧАТАЯ ОБГОННАЯ МУФТА | 2005 |
|
RU2298711C2 |
| ОБГОННАЯ МУФТА | 1968 |
|
SU211966A1 |
Изобретение относится к области машиностроения и может быть использовано в импульсных передачах для преобразования знакопеременного вращающего момента в знакопостоянный. Целью изобретения является повышение надежности путем исключения перекоса захвата при обгоне. Обгонный механизм содержит ведомый 3 и ведущий 2 валы, захват 4, свободно установленный на валу; Захват имеет выступы 5 и 6, взаимодействующие с упором 7 и рыча- гом 8, закрепленными на ведущем вале. При вращении ведущего вала 2 и взаимодействии упора 7 и выступа 5 захват 4 перекашивается и заклинивает ведомый вал 3. При взаимодействии рычага 8 и радиального выступа 6 захват расклинивается. Угловые перемещения захвата малы, что исключает соударение элементов при вращении ведущего вала с высокой частотой. 2 ил. а Ф С о 00 -vi сз ел фиг.1
| Леонов А.И | |||
| Микрохраповые механизмы свободного хода | |||
| М,: Машиностроение, 1982, с | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Обгонный механизм Н.П.Ефимова | 1976 |
|
SU1087713A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
